應(yīng)用于天線座的并聯(lián)機構(gòu)構(gòu)型設(shè)計*
2014-11-26 03:12:22段艷賓賈彥輝李建軍陸海坤
機械制造 2014年8期
□ 段艷賓 □ 賈彥輝 □ 李建軍 □ 陸海坤
1.中國電子科技集團公司 第五十四研究所 石家莊 050081
2.河北遠(yuǎn)東通信系統(tǒng)工程有限公司 石家莊 050081
隨著射電天文技術(shù)的發(fā)展,對射電天文望遠(yuǎn)鏡天線的精度、速度等要求越來越高。由于傳統(tǒng)方位俯仰天線座和XY型天線座存在如結(jié)構(gòu)復(fù)雜、體積質(zhì)量大、在天線連續(xù)轉(zhuǎn)動時必須要有匯流環(huán)和關(guān)節(jié)、且存在跟蹤盲區(qū)等缺點[1、2],精度和速度越來越成為制約射電天文技術(shù)發(fā)展的主要因素,因此迫切需要在天線座架結(jié)構(gòu)和控制上進(jìn)行創(chuàng)新。在這些方面并聯(lián)機構(gòu)天線座有其自身的優(yōu)點[3-5],主要體現(xiàn)在:機械零部件主要由滾珠絲杠、虎克鉸、球鉸、伺服電機等標(biāo)準(zhǔn)通用元器件組成,其數(shù)目較串聯(lián)機構(gòu)大幅減少,因此結(jié)構(gòu)簡單,可靠性高;結(jié)構(gòu)剛度大,承載能力強,靜態(tài)誤差小,剛度重量比遠(yuǎn)高于傳統(tǒng)的方位俯仰天線座;各可伸縮桿桿長均能單獨對動平臺的位置和姿態(tài)起作用,不存在傳統(tǒng)天線座的幾何誤差累積和放大的現(xiàn)象,甚至還有平均化效果,加之結(jié)構(gòu)的對稱性,故運動精度高;六桿天線座在天線連續(xù)轉(zhuǎn)動時不需要匯流環(huán)和關(guān)節(jié),且不存在跟蹤盲區(qū)。
基于并聯(lián)機構(gòu)的種種優(yōu)點,國內(nèi)外學(xué)者開始研究將并聯(lián)機構(gòu)應(yīng)用于天線座架[6],以提高射電天文望遠(yuǎn)鏡天線的運動速度和精度。
國內(nèi)如華為實[7]研究了Stewart并聯(lián)機構(gòu)作為天線支撐的分析,鄧先榮[8]在Stewart并聯(lián)機構(gòu)對雷達(dá)領(lǐng)域的應(yīng)用進(jìn)行了探討,關(guān)貴注[9]等將并聯(lián)機構(gòu)應(yīng)用于跟蹤天線座進(jìn)行了系統(tǒng)設(shè)計。但他們僅僅是將并聯(lián)機構(gòu)作為天線、雷達(dá)支撐的可行性進(jìn)行了分析,并未對并聯(lián)機構(gòu)應(yīng)用于天線支撐所存在的問題進(jìn)行深入探討。
筆者從實際設(shè)計角度出發(fā),分析了影響Stewart并聯(lián)機構(gòu)作為天線座架的因素,提出了切實可行的設(shè)計方法,對并聯(lián)機構(gòu)應(yīng)用于天線系統(tǒng)有重要參考意義。
1 構(gòu)型設(shè)計影響因素
1.1 結(jié)構(gòu)簡介
如圖1所示,Stewart并聯(lián)機構(gòu)由上下平臺以及6條可伸縮支鏈組成,支鏈一端通過虎克鉸與上平臺連接,另一端通過球鉸與下平臺連接,影響其構(gòu)型參數(shù)的主要有 R、r、H、θ1、φ1和 θ2、φ2。 其中 R 為固定平臺上各鉸點所在圓周半徑;r為運動平臺上各鉸點所在圓周半徑;H為動定平臺鉸點中心之間的距離;θ1、φ1為固定平臺相鄰兩鉸點間夾角;θ2、φ2為運動平臺相鄰兩鉸點間夾角。
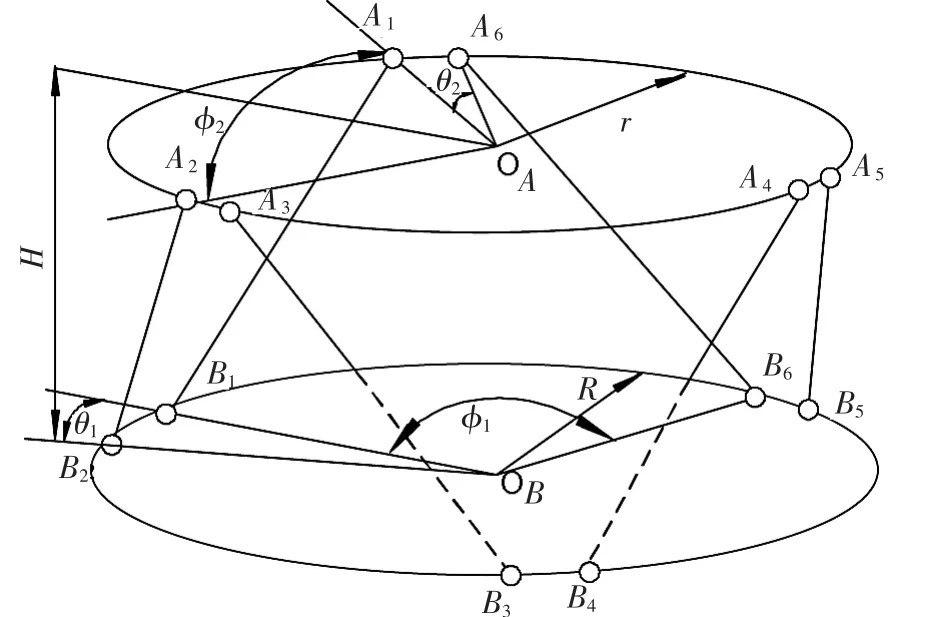
▲圖1 Stewart并聯(lián)機構(gòu)結(jié)構(gòu)示意圖
1.2 影響Stewart并聯(lián)機構(gòu)功能工作空間的因素
1.2.1 桿長的限制
定義動平臺的3個歐拉角為α、β、γ,則從動平臺到定平臺的姿態(tài)變化矩陣為:

式中:cα=cosα,cβ=cosβ,cγ=cosγ,sα=sinα,sβ=sinβ,sγ=sinγ。
定平臺上各虎克鉸中心在定坐標(biāo)系中的坐標(biāo)為:

動平臺上各球鉸中心在動坐標(biāo)系中的坐標(biāo)為:

將動平臺上各球鉸中心在動坐標(biāo)系中的坐標(biāo)轉(zhuǎn)化為在定坐標(biāo)系中表示:

根據(jù)6個驅(qū)動桿的球鉸中心點坐標(biāo)和虎克鉸中心點坐標(biāo),即可求得各驅(qū)動桿長度li:

式中:li為各驅(qū)動桿長度。
式(5)為并聯(lián)機構(gòu)給定運動平臺的位置和姿態(tài)后各分支桿所需要的桿長,但是桿長的長度變化范圍是有限的,這里用lmin和lmax來表示第i個分支桿運動范圍的最小值和最大值,則桿長的約束可以用,lmin≤li≤lmax表示,當(dāng)某一桿長長度達(dá)到其極限時,運動平臺上給定的參考點也就到達(dá)了工作空間的邊界。
1.2.2 運動副轉(zhuǎn)角的限制
機構(gòu)上平臺與各分支桿相連的關(guān)節(jié)為球面副,而下平臺與各分支桿相連的關(guān)節(jié)是虎克鉸,球面副和虎克鉸的轉(zhuǎn)角范圍實際上是有限制的。
如圖2所示,球面副的轉(zhuǎn)角θ由球面副基座的坐標(biāo)系Z軸和球面副的向量u確定,可以看出,球面副和虎克鉸的最大轉(zhuǎn)角θmax與運動副的具體結(jié)構(gòu)有關(guān)。若第i個球面副的基座在坐標(biāo)系{A}中的姿態(tài)用向量nAi來表示,則球面副的轉(zhuǎn)角約束:

▲圖2 球面副結(jié)構(gòu)示意圖

同樣,虎克鉸的轉(zhuǎn)角約束:

對于Stewart機構(gòu)而言,影響其工作空間的主要因素為鉸鏈的轉(zhuǎn)動范圍和桿長的限制,除此之外還有連桿之間的干涉、連桿與上平臺之間的干涉等,這些需要在機械設(shè)計時加以注意。
2 構(gòu)型優(yōu)化
2.1 優(yōu)化原則
由于六桿機構(gòu)所涉及的參數(shù)較多,需要根據(jù)不同的應(yīng)用場合制定合適的構(gòu)型優(yōu)化原則。
六桿機構(gòu)應(yīng)用于天線座,主要關(guān)心的是天線的方位、俯仰角度,天線需要方位360°旋轉(zhuǎn),俯仰角度為0~90°。因此六桿機構(gòu)的優(yōu)化原則首先是方位、俯仰角度都能到達(dá)指標(biāo)要求。在指標(biāo)達(dá)到要求的前提下,虎克鉸、球鉸所需的轉(zhuǎn)動范圍越小越好,且分支桿行程合適,在此基礎(chǔ)上,分支桿的受力越小越好。故提出以下優(yōu)化原則。
(1)方位、俯仰范圍分別為 0~360°和 0~90°。
(2)在機構(gòu)工作空間內(nèi),虎克鉸、球鉸運動范圍在鉸鏈設(shè)計范圍之內(nèi)。
(3)分支桿所需行程在安裝范圍內(nèi)。
(4)在全工作空間內(nèi),分支桿所受力較小。
2.2 天線方位俯仰轉(zhuǎn)角與鉸鏈擺角及桿長關(guān)系
在轉(zhuǎn)動方面,六桿機構(gòu)有其獨特的優(yōu)勢,如圖3所示,圖中,OA為動平臺中心,OB為定平臺中心,天線轉(zhuǎn)動中心可以任意指定,即天線可以繞OA轉(zhuǎn)動,也可以繞OAOB之間的任意點轉(zhuǎn)動,如圖3所示的O點。
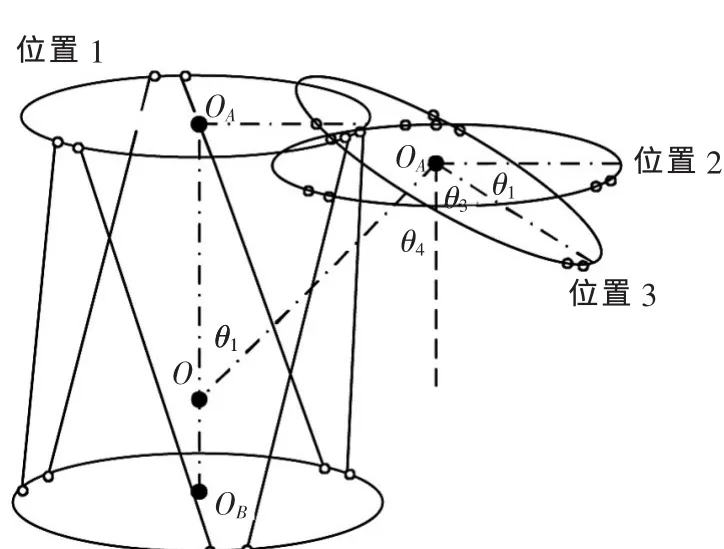
▲圖3 運動平臺轉(zhuǎn)動示意圖
從圖3可得出,動平臺繞O轉(zhuǎn)動θ1可以看作動平臺先從位置1平移到位置2,再繞OA轉(zhuǎn)動θ1,也就是說動平臺繞O轉(zhuǎn)動θ1時,與動平臺直接繞OA轉(zhuǎn)動θ1指向一致,只是動平臺中心點OA發(fā)生了變化。
因此,在俯仰控制時,控制思路為:上平臺先繞中心點O轉(zhuǎn)動θ1,再繞動平臺中心點OA轉(zhuǎn)動到90°。
根據(jù)以上分析,當(dāng)機構(gòu)構(gòu)型確定后,影響機構(gòu)轉(zhuǎn)動能力的因素主要為虎克鉸、球鉸轉(zhuǎn)動范圍以及桿長行程。三者主要與以下兩個參數(shù)有關(guān)。
(1)轉(zhuǎn)動中心位置O。
(2)繞轉(zhuǎn)動中心O轉(zhuǎn)動角度θ1。
給定 R=725 mm、r=450 mm、H=2 900 mm,θ1=θ2=20°、φ1=φ2=100°。
根據(jù)結(jié)構(gòu)構(gòu)型以及桿長和鉸鏈公式,按照上述控制思路,編程求取機構(gòu)在全工作空間內(nèi)運動過程中桿長最大行程及鉸鏈的轉(zhuǎn)動角度。
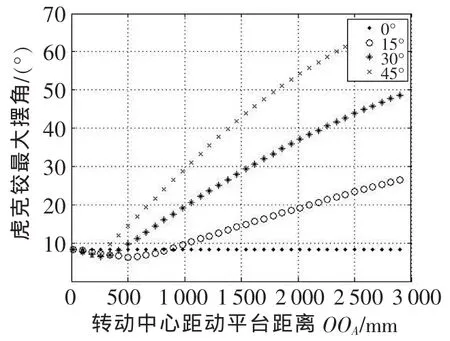
圖4~圖6中,橫坐標(biāo)為轉(zhuǎn)動中心O距動平臺距離,即OOA值;縱坐標(biāo)分別為分支桿行程、鉸鏈擺角等;不同直線表示不同θ1時分支桿行程、鉸鏈擺角與OOA關(guān)系。
從圖4中可以看出,當(dāng)θ1一定時,分支最大行程隨OOA增大而增大;從圖5中可以看出,當(dāng)θ1一定時,球鉸所需最大擺角隨OOA增大而減小;從圖6中可以看出,當(dāng)θ1一定時,虎克鉸所需最大擺角隨OOA增大而增大。θ1的值只是影響直線的斜率。
從圖5中可以看出,在OOA和θ1均為0時,球鉸最大擺角最大,已超過90°,而與之對應(yīng)的虎克鉸最大擺角較小,一般情況下,所設(shè)計的鉸鏈最大擺角不超過90°,因此需要選擇合適的OOA和θ1,使鉸鏈最大擺角在所設(shè)計的范圍內(nèi)。
從圖4、圖5可知,OOA的值選擇在H(動定平臺之間距離)一半左右比較合適,因為此時分支桿行程增加較小,而所需球鉸最大擺角下降較大。

▲圖4 分支桿行程與轉(zhuǎn)動中心及轉(zhuǎn)動角度關(guān)系

▲圖5 球鉸最大擺角與轉(zhuǎn)動中心及轉(zhuǎn)動角度關(guān)系
▲圖6 虎克鉸最大擺角與轉(zhuǎn)動中心及轉(zhuǎn)動角度關(guān)系

▲圖7 優(yōu)化過程流程圖
綜合分析,暫定OOA=0.5H、θ1=30°進(jìn)行Stewart并聯(lián)機構(gòu)的結(jié)構(gòu)優(yōu)化設(shè)計。優(yōu)化流程圖如圖7所示。
約束條件包括分支桿行程及安裝空間、鉸鏈擺角<85°、鉸鏈安裝空間等。搜索范圍為:R=300 mm~700 mm,r=200 mm~400 mm,H=1 200 mm~2 500 mm,鉸鏈夾角范圍 4~20°。
經(jīng)編程計算,得到合適的構(gòu)型,見表1。

表1 優(yōu)化所得機構(gòu)參數(shù)表
根據(jù)表1中的參數(shù),利用MATLAB編程計算機構(gòu)在負(fù)載5 000 N、方位 360°、俯仰90°工作空間內(nèi)運動以及末端速度 10°/s、加速度 20°/s2時,分支桿上鉸鏈轉(zhuǎn)動范圍、分支桿運動范圍、受力及速度加速度情況見表2。
從表2可以看出,所設(shè)計的機構(gòu)鉸鏈運動范圍、分支桿運動范圍及分支桿速度、加速度、受力等均在可承受的合理范圍內(nèi),說明通過以上優(yōu)化算法能夠優(yōu)化出符合要求的并聯(lián)機構(gòu)天線座架。

表2 運動過程中分支桿參數(shù)表
3 結(jié)論
本文以應(yīng)用于天線座架的Stewart并聯(lián)機構(gòu)為對象,研究了影響應(yīng)用于天線座架的Stewart并聯(lián)機構(gòu)的構(gòu)型的主要因素,建立了構(gòu)型的優(yōu)化原則,得到了并聯(lián)天線座架方位俯仰轉(zhuǎn)角與機構(gòu)鉸鏈擺角及桿長的關(guān)系,最后通過計算實例驗證了構(gòu)型優(yōu)化原則的正確性。本文緊密結(jié)合實際要求,研究內(nèi)容對于Stewart并聯(lián)機構(gòu),真正應(yīng)用于天線座架具有重要的理論指導(dǎo)意義。
[1] 張燕.過頂跟蹤的天線座設(shè)計方法 [J].無線電工程,1997,27(4):37-39.
[2] 吳風(fēng)高.天線座結(jié)構(gòu)設(shè)計[M].西安:西北電汛工程學(xué)院出版社,1975.
[3] Stewart D.A Platform with 6-DOF [C].Proceeding of the Institution of Mechanical Engineering,London,1965.
[4] 黃真,趙永生,趙鐵石.高等空間機構(gòu)學(xué)[M].北京:高等教育出版社,2005.
[5] 韓秀英,劉延斌,賈現(xiàn)召.6-SPS型并聯(lián)機構(gòu)的混合坐標(biāo)動力學(xué)建模[J].機械設(shè)計與制造,2008(1):4-5.
[6] 華為實.基于3—RSR并聯(lián)機器人機構(gòu)的天線支撐 [J].機械,2000,27(5):10-14.
[7] 華為實.Stewart機器人用作天線支撐的分析 [J].電子科技大學(xué)學(xué)報,1999,28(4):443-446.
[8] 鄧先榮.Stewart平臺機構(gòu)在雷達(dá)領(lǐng)域中的應(yīng)用探討[J].電子機械工程,2009,25(2):41-43.
[9] 關(guān)貴注,李涼海,張雪峰,等.六自由度自跟蹤天線座的系統(tǒng)設(shè)計[J].遙測遙控,2007,28(11):209-211.
