船舶主動力系統(tǒng)實(shí)船訓(xùn)練系統(tǒng)的研究與實(shí)現(xiàn)
2014-11-29 03:19:36員欽升
機(jī)電設(shè)備 2014年5期
員欽升,屈 崇,許 峰,羅 昊
● (中國船舶重工集團(tuán)公司第七一一研究所,上海 201108)
船舶主動力系統(tǒng)實(shí)船訓(xùn)練系統(tǒng)的研究與實(shí)現(xiàn)
員欽升,屈 崇,許 峰,羅 昊
● (中國船舶重工集團(tuán)公司第七一一研究所,上海 201108)
實(shí)船訓(xùn)練系統(tǒng)是將仿真訓(xùn)練系統(tǒng)嵌入到船舶的實(shí)際系統(tǒng)中,船員可在平時的工作環(huán)境中訓(xùn)練各項操作,以便能夠熟練地掌握各項操作技能,具有費(fèi)用低、質(zhì)量高、效率高等優(yōu)點(diǎn)。 本文從國內(nèi)外實(shí)船訓(xùn)練系統(tǒng)的研究現(xiàn)狀出發(fā),提出了基于某型船主動力系統(tǒng)開發(fā)的實(shí)船訓(xùn)練系統(tǒng),闡述了該系統(tǒng)的組成、系統(tǒng)安全性的設(shè)計、 系統(tǒng)所實(shí)現(xiàn)的功能以及系統(tǒng)的應(yīng)用前景等。
船舶;主動力系統(tǒng);實(shí)船訓(xùn)練系統(tǒng);船員培訓(xùn)
0 引言
隨著科技的發(fā)展,現(xiàn)代船舶的裝備性能得到大幅提高,船舶主動力系統(tǒng)的裝備操縱規(guī)程也趨于自動化、智能化,對船員的要求也不斷提高,傳統(tǒng)的船員培訓(xùn)方式已不能滿足船員的要求[1]。
目前,國內(nèi)對學(xué)員采用的培訓(xùn)方式主要是陸上模擬器訓(xùn)練[2],由于模擬器訓(xùn)練是采用模擬設(shè)備,與實(shí)際設(shè)備之間有很大差距,學(xué)員不能真正的融入到實(shí)際的操縱環(huán)境中,對提高學(xué)員的實(shí)際操縱能力有很大的局限性。國外船舶自動化公司于20世紀(jì)90年代提出了實(shí)船訓(xùn)練系統(tǒng),它是指將仿真訓(xùn)練系統(tǒng)嵌入到船舶的實(shí)際操縱系統(tǒng)中,能夠使船員熟練地掌握各項操作技能[3]。
近年來,國外很多船舶自動化公司陸續(xù)研究出了適用于各自船舶自動化系統(tǒng)的實(shí)船訓(xùn)練系統(tǒng),有些系統(tǒng)已經(jīng)在實(shí)船得到了應(yīng)用,具有很好的效果。但是目前國內(nèi)還沒有成熟的實(shí)船訓(xùn)練系統(tǒng),我所基于某型船的主動力系統(tǒng)開發(fā)出了一套主動力系統(tǒng)的實(shí)船訓(xùn)練系統(tǒng),該系統(tǒng)具有仿真精度高、培訓(xùn)課程系列化、系統(tǒng)安全性高等優(yōu)點(diǎn),目前該系統(tǒng)已完成樣機(jī)試驗(yàn)。
1 國內(nèi)外實(shí)船訓(xùn)練系統(tǒng)的現(xiàn)狀
1.1 國外狀況
隨著船舶自動化的快速發(fā)展,許多國家都將實(shí)船訓(xùn)練系統(tǒng)作為船舶平臺管理系統(tǒng)的重要組成部分,結(jié)合各自的船舶自動化系統(tǒng)構(gòu)建出了相應(yīng)的實(shí)船訓(xùn)練系統(tǒng),如美國AAI公司、德國西門子公司、ABB公司、加拿大L3-MAPPS Communication公司等。
作為世界領(lǐng)先的實(shí)船訓(xùn)練系統(tǒng)制造商,美國的 AAI公司從1998年以來,就在90多條美國艦艇上安裝了400多套OBTS(On-Board Training System)[4]。
近年來,德國西門子公司的SINAVYCISOBTS(訓(xùn)練船員操作船舶輪機(jī)自動化系統(tǒng)的實(shí)船訓(xùn)練系統(tǒng))被廣泛應(yīng)用于西門子公司所參與的多艘德國和其他國家海軍的水面艦艇和潛艇的設(shè)計制造,受到了廣大官兵好評[5]。
加拿大L3-MAPPS Communication公司所開發(fā)的實(shí)船訓(xùn)練系統(tǒng)是利用船員日常使用的IPMS工作站作為平臺,平臺加載有實(shí)時的模擬環(huán)境,船員可按照培訓(xùn)的計劃操縱設(shè)備,不會對控制系統(tǒng)原有的功能構(gòu)成影響。
實(shí)船訓(xùn)練系統(tǒng)不但可應(yīng)用于船舶的輪機(jī)自動化系統(tǒng)中,在船舶雷達(dá)、導(dǎo)航、船舶操縱等方面也可發(fā)揮其重要作用。近年來,已有很多公司形成了其成熟的實(shí)船訓(xùn)練系統(tǒng)產(chǎn)品,被廣泛應(yīng)用于軍艦和民用船舶上。
1.2 國內(nèi)狀況
雖然實(shí)船訓(xùn)練系統(tǒng)在國外得到了快速發(fā)展,但是國內(nèi)船員自動化廠商還沒有給予足夠的重視,輪機(jī)模擬器仍是國內(nèi)船員培訓(xùn)的主要方式和研究重點(diǎn)。
輪機(jī)模擬器是指采用半實(shí)物仿真的方法搭建一個與實(shí)船相似的模擬操作平臺,在模擬設(shè)備上對系統(tǒng)進(jìn)行操作,使學(xué)員了解設(shè)備的操作方法,對單純的書本教學(xué)來說,模擬器培訓(xùn)可有效降低培訓(xùn)成本,提升培訓(xùn)質(zhì)量和效率[6]。但是輪機(jī)模擬器也有其局限性:模擬器是半實(shí)物仿真,學(xué)員對船舶設(shè)備認(rèn)識不夠直觀;模擬設(shè)備無法真實(shí)反映船舶設(shè)備的實(shí)際響應(yīng)情況,學(xué)員操縱模擬器與操縱船舶設(shè)備會產(chǎn)生較大落差。而實(shí)船訓(xùn)練系統(tǒng)是將仿真訓(xùn)練系統(tǒng)嵌入到船舶的實(shí)際操縱系統(tǒng)中,既包含了模擬器的優(yōu)點(diǎn),也解決了模擬器仿真情況不逼真的問題,能夠使船員更加熟練地掌握動力系統(tǒng)的各項操作技能和積累經(jīng)驗(yàn)。
目前,國內(nèi)還沒有投入實(shí)船使用的訓(xùn)練系統(tǒng)產(chǎn)品,但是國內(nèi)模擬器的研究已經(jīng)非常成熟,在借鑒國內(nèi)成熟模擬器技術(shù)的基礎(chǔ)上,711所開發(fā)出了一套針對某型船主動力系統(tǒng)的實(shí)船訓(xùn)練系統(tǒng),該系統(tǒng)將訓(xùn)練軟件嵌入到船舶原有動力監(jiān)控系統(tǒng)中,具有較高的仿真精度,有效實(shí)現(xiàn)了實(shí)船訓(xùn)練功能。
2 實(shí)船訓(xùn)練系統(tǒng)介紹
船舶主動力系統(tǒng)一般分為主動力控制系統(tǒng)和主動力監(jiān)測系統(tǒng):主動力控制系統(tǒng)是對船舶主動力的設(shè)備(主機(jī)、齒輪箱、螺旋槳等)進(jìn)行控制,主動力監(jiān)測系統(tǒng)是對這些設(shè)備的運(yùn)行狀況進(jìn)行監(jiān)測,實(shí)時反映相關(guān)設(shè)備的運(yùn)行參數(shù)。
2.1 訓(xùn)練系統(tǒng)的組成
本實(shí)船訓(xùn)練系統(tǒng)基于某型船的原有推進(jìn)監(jiān)控系統(tǒng)模式,增加了一個教練員操縱平臺(可根據(jù)船舶實(shí)際情況,將操縱平臺安裝在其它設(shè)備上),系統(tǒng)結(jié)構(gòu)如圖1所示。原船舶動力系統(tǒng)中各設(shè)備之間的通訊方式為雙冗余以太網(wǎng)通訊(航行網(wǎng)1和航行網(wǎng)2),本訓(xùn)練系統(tǒng)在原網(wǎng)絡(luò)通訊基礎(chǔ)上增加了訓(xùn)練網(wǎng),如圖1所示。在航行模式時,航行網(wǎng)1、航行網(wǎng)2與駕駛室推進(jìn)控制臺、集控室推進(jìn)控制臺、主機(jī)、齒輪箱、螺旋槳及其附屬設(shè)備構(gòu)成船舶的主動力系統(tǒng)。當(dāng)進(jìn)入實(shí)船訓(xùn)練模式時,實(shí)船訓(xùn)練系統(tǒng)屏蔽監(jiān)控系統(tǒng)與其監(jiān)控設(shè)備的通訊,訓(xùn)練網(wǎng)與駕駛室控制臺、集控室控制臺、教練員操縱平臺(裝有仿真模型及教練員軟件)就構(gòu)成了一個具有高仿真精度的“主動力系統(tǒng)”。
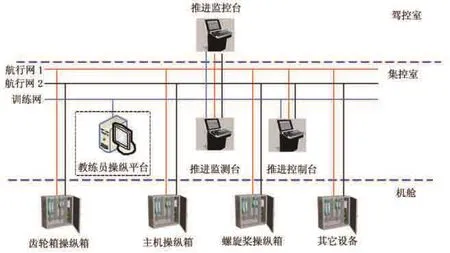
圖1 系統(tǒng)結(jié)構(gòu)圖
教練員操縱平臺上裝有仿真模型和教練員軟件,仿真模型是利用微分方程以及系統(tǒng)辨識等多種建模方法疊加建立的替代主推進(jìn)裝置(包括主機(jī)、齒輪箱、軸系、螺旋槳、船體以及輔助設(shè)備等)的數(shù)學(xué)模型[7],訓(xùn)練系統(tǒng)根據(jù)控制臺發(fā)出的主機(jī)、齒輪箱、軸系、螺旋槳的起動、運(yùn)行、停機(jī)和各類故障等指令改變模型的狀態(tài),從而達(dá)到推進(jìn)設(shè)備不動作而進(jìn)行船員訓(xùn)練的目的。教練員軟件是訓(xùn)練指導(dǎo)者使用的控制終端,負(fù)責(zé)對整個訓(xùn)練系統(tǒng)的管理、配置、監(jiān)視和評估的任務(wù)。
實(shí)船訓(xùn)練系統(tǒng)的主動力控制系統(tǒng)是在原主動力控制系統(tǒng)基礎(chǔ)上增加了實(shí)船訓(xùn)練功能,即本實(shí)船訓(xùn)練系統(tǒng)的控制系統(tǒng)分為2種運(yùn)行模式:航行模式和訓(xùn)練模式,從而降低了訓(xùn)練操作和實(shí)際操作之間的差異。進(jìn)入訓(xùn)練模式時需要滿足條件:動力系統(tǒng)相關(guān)設(shè)備控制部位在遙控時,需要主機(jī)轉(zhuǎn)速為零,齒輪箱、螺旋槳等設(shè)備均在空車位;上述設(shè)備的控制部位在機(jī)旁時,可無條件進(jìn)入訓(xùn)練模式。退出訓(xùn)練模式時需要滿足條件:如果系統(tǒng)相應(yīng)設(shè)備在遙控狀態(tài),需要駕、集控制手柄推到空車位置,其它設(shè)備的控制也在空車位。船員訓(xùn)練時,可以通過控制臺對設(shè)備進(jìn)行操縱,訓(xùn)練過程中教練員操縱平臺可以模擬設(shè)備操縱過程中的各類故障,提高了船員對設(shè)備操縱的熟練程度以及故障排除能力。
實(shí)船訓(xùn)練系統(tǒng)的監(jiān)測系統(tǒng)是在原監(jiān)測系統(tǒng)基礎(chǔ)上增加了實(shí)船訓(xùn)練功能,即本實(shí)船訓(xùn)練系統(tǒng)的監(jiān)測臺系統(tǒng)分為2種運(yùn)行模式:航行模式和訓(xùn)練模式,系統(tǒng)在訓(xùn)練模式下接收仿真模型數(shù)據(jù),屏蔽航行模式數(shù)據(jù),系統(tǒng)在航行模式下接收實(shí)際設(shè)備的運(yùn)行參數(shù),屏蔽仿真模型數(shù)據(jù)。船員訓(xùn)練時,不僅可通過監(jiān)測臺軟件實(shí)時監(jiān)測參數(shù)的變化和報警,還可通過故障答題卡進(jìn)行故障排除。故障解決后,仿真模型故障解除,相應(yīng)測點(diǎn)恢復(fù)正常。
2.2 訓(xùn)練系統(tǒng)安全性的設(shè)計
動力系統(tǒng)的安全性是本實(shí)船訓(xùn)練系統(tǒng)的研究重點(diǎn),一個好的實(shí)船訓(xùn)練系統(tǒng)不僅可為船員提供一個高精度操縱平臺,還要不影響船舶原系統(tǒng)的穩(wěn)定性。為了達(dá)到上述目的,本實(shí)船訓(xùn)練系統(tǒng)在網(wǎng)絡(luò)與監(jiān)控系統(tǒng)方面均采取了相應(yīng)的措施。
網(wǎng)絡(luò)方面:為了實(shí)現(xiàn)實(shí)際數(shù)據(jù)和訓(xùn)練數(shù)據(jù)的安全隔離,本實(shí)船訓(xùn)練系統(tǒng)采用兩個網(wǎng)絡(luò):航行網(wǎng)和訓(xùn)練網(wǎng),兩個網(wǎng)絡(luò)使用不同的交換機(jī),實(shí)現(xiàn)了網(wǎng)絡(luò)的物理隔離,同時對航行網(wǎng)的網(wǎng)段、IP地址與訓(xùn)練網(wǎng)的網(wǎng)段、IP地址做了專門的設(shè)置。
監(jiān)控系統(tǒng)方面:本實(shí)船訓(xùn)練系統(tǒng)除對進(jìn)入、退出訓(xùn)練模式設(shè)置了聯(lián)鎖條件之外,在進(jìn)行模式切換的同時也對網(wǎng)絡(luò)進(jìn)行了切換:進(jìn)入訓(xùn)練模式時,系統(tǒng)關(guān)閉航行網(wǎng)的通訊Socket,對訓(xùn)練網(wǎng)的通訊Socket進(jìn)行初始化;退出訓(xùn)練模式時,系統(tǒng)關(guān)閉訓(xùn)練網(wǎng)的通訊Socket,初始化航行網(wǎng)的通訊Socket。
2.3 訓(xùn)練系統(tǒng)實(shí)現(xiàn)的功能
為了很好的實(shí)現(xiàn)訓(xùn)練功能,本實(shí)船訓(xùn)練系統(tǒng)包括訓(xùn)練輔導(dǎo)教學(xué)、訓(xùn)練課程設(shè)置、訓(xùn)練結(jié)果評估以及訓(xùn)練歷時數(shù)據(jù)查詢等功能。
訓(xùn)練輔導(dǎo)教學(xué):本系統(tǒng)可根據(jù)船員的具體要求加載一些設(shè)備的操縱指導(dǎo)書、操縱視頻、操縱音頻等教材,船員可以通過這些教材對動力系統(tǒng)的操作進(jìn)行詳細(xì)了解,提高自身的業(yè)務(wù)水平。
訓(xùn)練課程設(shè)置:本系統(tǒng)包含系列化的培訓(xùn)課程,教練員可以根據(jù)不同崗位、不同熟練程度的學(xué)員設(shè)置不同范圍、不同側(cè)重點(diǎn)和不同難度的訓(xùn)練內(nèi)容,為所有學(xué)員提供一個有效的訓(xùn)練課程。訓(xùn)練內(nèi)容除包括正常操作訓(xùn)練外,還包括對故障和異常情況處理的訓(xùn)練,學(xué)員可完成實(shí)際系統(tǒng)中無法或者不允許執(zhí)行的操作訓(xùn)練。訓(xùn)練形式包括單學(xué)員培訓(xùn)和小組集體培訓(xùn),可以很好的提高學(xué)員獨(dú)立操縱能力和團(tuán)隊協(xié)作能力。
訓(xùn)練評估:本系統(tǒng)不僅給學(xué)員提供了系列化的培訓(xùn)課程,也可以對學(xué)員的操作進(jìn)評估,并給出相應(yīng)的分?jǐn)?shù)。本評估系統(tǒng)主要從訓(xùn)練內(nèi)容完成情況、訓(xùn)練過程故障修復(fù)情況以及操作時間等方面進(jìn)行綜合評估,給出一個公正的分?jǐn)?shù),教練員可對學(xué)員的掌握情況有一個明確的了解。
訓(xùn)練數(shù)據(jù)查詢:本系統(tǒng)具有歷史數(shù)據(jù)查詢功能,可以查詢以往學(xué)員操作的歷史數(shù)據(jù),同時對學(xué)員操縱過程中出現(xiàn)的問題進(jìn)行匯總、分析,通過統(tǒng)計結(jié)果,教練員可了解到學(xué)員的問題所在,對學(xué)員出現(xiàn)錯誤比較多的問題進(jìn)行系統(tǒng)講解、培訓(xùn),讓學(xué)員的操作能力切實(shí)得到提高。
2.4 訓(xùn)練系統(tǒng)的應(yīng)用情況
本實(shí)船訓(xùn)練系統(tǒng)作為主動力監(jiān)控系統(tǒng)的一部分已經(jīng)應(yīng)用在了在所制造的某型船的動力監(jiān)控系統(tǒng)上面,目前該系統(tǒng)已完成樣機(jī)試驗(yàn),系統(tǒng)的穩(wěn)定性、安全性已經(jīng)得到了驗(yàn)證,本系統(tǒng)將依據(jù)計劃應(yīng)用到船舶上,將成為我國訓(xùn)練系統(tǒng)實(shí)船應(yīng)用的先例。
3 結(jié)語
實(shí)船訓(xùn)練系統(tǒng)作為船舶平臺管理系統(tǒng)的一部分,教練員可在船員日常工作的操縱環(huán)境中對其進(jìn)行培訓(xùn),可地提高船員的實(shí)際操縱能力[8]。國外很多公司已經(jīng)進(jìn)行了研究,并有了成熟的產(chǎn)品,但是國內(nèi)還沒有成熟的實(shí)船訓(xùn)練系統(tǒng)產(chǎn)品。711所開發(fā)了一套基于某型船主動力系統(tǒng)的實(shí)船訓(xùn)練系統(tǒng),該系統(tǒng)具有仿真精度高、培訓(xùn)內(nèi)容系列化、穩(wěn)定性高等優(yōu)點(diǎn),對船員起到很好的訓(xùn)練效果。該系統(tǒng)目前已完成樣機(jī)研制,將依據(jù)計劃應(yīng)用到船舶上,將來會結(jié)合船員的實(shí)際使用情況不斷完善,最終形成一套成熟的實(shí)船訓(xùn)練系統(tǒng),該系統(tǒng)將會填補(bǔ)國內(nèi)實(shí)船訓(xùn)練系統(tǒng)在實(shí)船應(yīng)用方面的空白。
[1] 魏曉明, 劉金林, 曾凡明. 艦船主動力系統(tǒng)虛擬維修訓(xùn)練系統(tǒng)研究[J]. 中國修船, 2010, 23(3): 47-48
[2] 陳玉文. 軍用訓(xùn)練模擬器的需求與發(fā)展研究[J]. 海軍軍訓(xùn)器材研究所, : 14-18
[3] 陸錦輝, 張敏. 主推進(jìn)系統(tǒng)實(shí)船訓(xùn)練系統(tǒng)的研究與實(shí)現(xiàn)[J]. 上海船舶運(yùn)輸科學(xué)研究所學(xué)報, 2006, 29(1):6-13.
[4] Moschopoulos J. Advanced Integrated control and information system in The US Navy [A]. Proceeding of Eleventh Ship Control System Symposium [C]. USA:[s. n.], 1997.
[5] Siemens. Completely Integrated solution for navy SINAVYCIS[OB/OL].2004-04-18 [2006-2-17]http://www.industry.siemens.com/broschueren/downloa ds/marine.
[6] 賈寶柱, 曹輝, 張均東, 等. 輪機(jī)模擬器及其關(guān)鍵技術(shù)[J]. 中國航海, 2012, 35(1): 35-40.
[7] 潘立登, 潘迎東. 系統(tǒng)辨識與建模[M]. 北京: 化學(xué)工業(yè)出版社, 2004.
[8] 周國平, 袁利國, 高宜鵬, 等. 艦船動力裝置實(shí)船嵌入式仿真訓(xùn)練系統(tǒng)[J]. 艦船科學(xué)技術(shù), 2013, 35(5):74-78.
Research and Realization of Training System of Ship Main Power System
YUAN Qin-sheng, QU Chong, XU Feng, LUO Hao
(No.711 Institute, CSIC, Shanghai 201108, China)
On-board training system (OBTS) is a kind of crew training simulator embedded in ship system, it enables the crews practice system’s various operation in the daily work environment, and helps crews mastered necessary operation ability, which has the features of low cost, high quality and high efficiency. From the research status of OBTS’s study in domestic and abroad, the article proposes an OBTS that our research institute develops. The article elaborates the system components, system security design, OBTS’s function and the system prospects etc.
ship; main power system; on-board training system; crew’s training
U692.7
A
員欽升(1988-),男,碩士,工程師。研究方向:船舶自動化。
猜你喜歡
艦船科學(xué)技術(shù)(2022年14期)2022-09-22 03:07:40
中國特種設(shè)備安全(2022年6期)2022-09-20 02:52:28
船舶(2021年4期)2021-09-07 17:32:22
辦公室業(yè)務(wù)(2020年18期)2020-09-29 12:15:58
小哥白尼(趣味科學(xué))(2019年10期)2020-01-18 09:16:22
勞動保護(hù)(2019年7期)2019-08-27 00:41:26
電子制作(2018年11期)2018-08-04 03:26:08
工業(yè)設(shè)計(2016年12期)2016-04-16 02:52:00
消費(fèi)者報道(2014年7期)2014-07-31 11:23:57
體育師友(2011年5期)2011-03-20 15:29:53