基于仿人預測控制的發動機怠速仿真研究
2014-12-23 11:34:46鄭太雄
科技視界 2014年3期
李 鵬 李 銳 李 洋 鄭太雄
(重慶郵電大學 汽車電控研究所,中國 重慶400065)
0 引言
發動機怠速工況是指發動機在不對外做功的情況下,以最低轉速穩定運轉的狀態。在交通擁擠的城市里,車輛的怠速時間約占總運行時間的1/3,約有30%的燃油消耗與此,怠速工況對發動機的耗油量和廢氣排放有著重要影響[1]。汽車發動機在怠速時最易受到大用電設備使用情況的影響,導致怠速的波動,嚴重時會引起發動機熄火,它一方面限制了低怠速值,增加燃料消耗,另一方面也會引起車身振動,降低汽車的舒適性。因此怠速穩定性控制是一個綜合協調的過程,是發動機控制研究的重要內容之一,國內外學者對此進行研究,怠速控制策略已經從傳統的PID經典控制理論發展到模糊控制、預測控制等現代智能理論。但是由于發動機具有非線性、時變性及大滯后等特點,很難獲得精確的發動機怠速數學模型,控制系統的參數識別和控制器參數的整定相當困難,導致怠速控制問題一直是發動機領域一個難點。為此,本文提出一種基于仿人邏輯預測控制的怠速控制策略,通過實驗驗證該方法在多狀態切換及穩定性控制方面有明顯的提高。
1 發動機因素分析
在發動機運行過程中,進氣、供油、點火以及負荷變化等因素都會導致怠速轉速發生變化。對這些因素進行分析,進氣量、噴油量和點火角是三個變量,噴油量包括基本噴油量和補償修正量兩部分。進氣量的多少決定了發動機的動力輸出,點火角過大或過小都會影響發動機的燃燒特性,造成怠速化學能釋放的穩定性以及尾氣排放的特性。以進氣量和點火角為例進行兩個因素方差分析,考察節氣門開度大小和點火提前角的大小對發動機曲軸轉速的影響。對六缸、四沖程、2.7升汽車發動機進行MATLAB建立汽油發動機怠速平均值模型[2],模型能夠良好的運行。通過MATLAB模型得到試驗數據,將節氣門開度值(A因素)分成A1~A41=10:0.05:12共41個水平,同時將點火提前角大小(B因素)分成 B1~B41=2:0.2:10共 41個水平,進行交叉分組試驗,即不同節氣門與不同點火提前角的配比下測定一次發動機曲軸轉速,測定結果做數據表,試做方差分析。按兩個因素單獨觀測值試驗的方差分析公式如下:
總平方和:

A因素平方和:

B因素平方和:

式中C為校正數,誤差平方和SSe=SST-SSA-SSB,總自由度dfT=ab-1,A因素自由度dfA=a-1,B因素自由度dfB=b-1,誤差自由度dfe=dfT-dfA-dfB,計算結果形成方差分析表1。
根據 df1=dfA=40,df2=dfe=1600,查臨界 F 值,F=1.401684;根據 df1=dfB=40,df2=dfe=1600,查臨界值F=1.401684。因為A因素(節氣門開度)的F值10847.58>1.401684,故差異極顯著;因素B(點火提前角)的F值4560.75>1.401684,故差異極其顯著。

表1 方差分析表
通過以上兩個因素方差分析得出以下兩點:一是進氣量和點火角對發動機曲軸轉速的影響都是極顯著的;二是進氣量的影響比點火角的影響大些,所以通過對進氣量的調節能提供比點火提前角控制更大的轉矩,因此調節發動機的轉速范圍更大。雖然點火提前角控制產生的轉矩更小,但是由于發動機任何參數的改變到發動機性能的體現都會存在延時現象,通常改變進氣量來調節怠速轉速時,這種時延為500ms,而改變點火提前角來調節轉速的時延短的多,只有90ms左右[3]。因此,通過對點火提前角的控制方法來控制怠速時的發動機轉速控制效果要快得多。最后,將怠速的控制量選為進氣量和點火提前角。
2 怠速控制策略的研究
通過多因素分析確定改變怠速空氣量和點火提前角對汽油發動機怠速轉速實施控制。汽油發動機的怠速工況是一個非線性、時變和不確定的過程,需要找一個合適的控制方法。仿人智能控制在解決復雜問題多狀態上有明顯的優勢,仿人智能控制器的原型算法于1979年由重慶大學周其鑒教授等人提出,1983年在國際上正式發表[4]。仿人智能控制器的原型算法為:
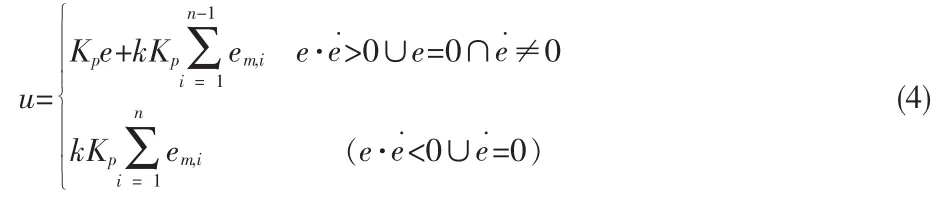
式中,u為控制輸出,Kp為比例系數,k為抑制系數,e為誤差,e˙為誤差的變化率,em,i為誤差的第i次峰值。
預測控制是一類用計算機實現的最優控制算法,建模方便,不需要深入了解過程內部機理,有利于提高系統的魯棒性,簡單實用的模型校正方法,較強的魯棒性[5]。一個典型的預測控制系統組成大致包括原始模型、預測控制、參考軌跡和在線優化等四個部分。預測控制的實質就是使實際輸出和設定的控制輸入之間均方誤差最小。預測控制的功能是根據被控對象的歷史信息和未來輸出來預測系統未來輸出[6]。
仿人邏輯控制器是對人主動開環控制及強時變控制的模擬,預測控制是對師傅經驗的模擬,其共同特征是主動時變控制[7]。兩者的結合將是對人的控制思維特點的較全面模擬。仿人邏輯控制器系統在正常區間運行平穩,突發事件瞬間切換,能夠確保系統安全,模型失配時也能保證滿意運行。雖然這樣的處理也許不是全局最優的,但卻是在確保強魯棒性基礎上的局部最優,這樣一種策略對于某些工業控制至關重要。因此,本文針對怠速控制設計了發動機仿人邏輯控制器,如結構圖1。
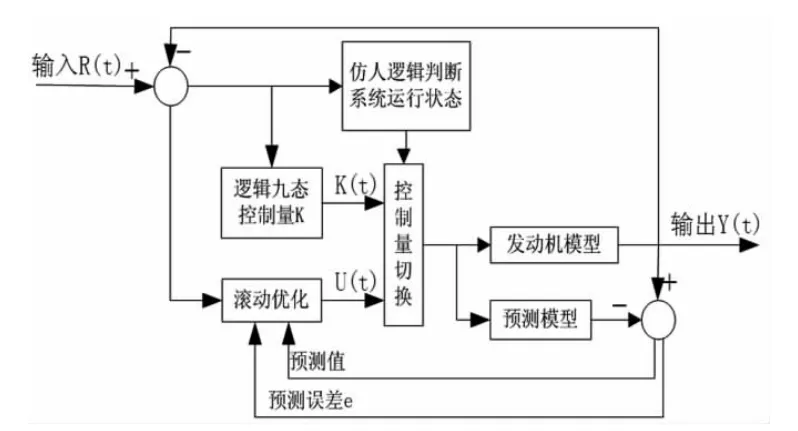
圖1 發動機仿人邏輯預測控制器結構框圖
控制器的工作原理如下:在系統工作時邏輯控制器和預測控制器同時工作,其控制輸出量分別為K(t)和U(t)。邏輯控制設置較寬的誤差控制帶e0,其作用是用最短的時間將發動機轉速轉變到目標怠速狀態,暫且不管小的波動。預測控制的作用是利用預測模型將發動機轉速穩定在正常狀態,并使控制曲線最優。控制量切換要選擇合適的時機對這兩種控制信號進行切換。具體而言,當發動機轉速遠離正常狀態,即通過仿人邏輯狀態判斷其運行狀態,通過控制量切換到預測控制器,此時相當于師傅的經驗開始起作用。這樣一種控制結構充分利用了邏輯控制對模型匹配要求極低的特點,在模型失配的情況下仍然能取得滿意效果。此控制器的本質是時變開環控制加閉環校正控制,是將人的思維控方式融合到模型中的結果。
3 仿真驗證
3.1 仿真條件及過程
汽車在啟動的過程中,發動機曲軸轉速是從低轉速迅速到達目標怠速的過程,然而汽車在正常運行中,從運行狀態到怠速是一種非常普遍的過程,在這個過程中,發動機曲軸轉速是從高轉速迅速降到目標怠速的過程,所以分析這種狀態也是很有必要的。所以實驗過程中,本文分了兩種情況進行實驗分析,即發動機曲軸轉速從低轉速到目標怠速的情況和發動機曲軸轉速從2000r/min速降到怠速的情況。將發動機的目標怠速設定在850r/min,對PID、模糊和仿人邏輯預測控制(HLPC)三種控制方法進行仿真對比,驗證本文提出的控制方法的優越性。最后在達到穩定怠速的時間段內加入10N的外加力矩,仿真對比哪種控制方法好。
3.2 仿真結果
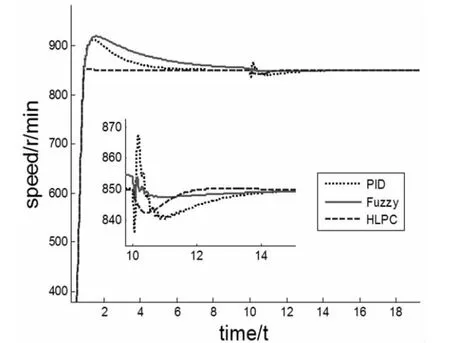
圖2 啟動過程仿真效果圖
發動機曲軸轉速從低轉速到目標怠速的情況如圖2所示,藍色虛線的是仿人邏輯預測控制的結果。在模型完全匹配的情況下,本文提出的仿人邏輯預測控制器的結果是最優的,在仿真效果圖中可以看出在此控制下發動機轉速能夠迅速的達到目標轉速,明顯比PID控制和模糊控制的效果好。整個怠速系統在10s時加入10N外加力矩,放大10s處外加力矩時的狀態,可以看出仿人邏輯預測控制也能很好的達到要求,在受到波動的情況下能很快的恢復到穩定的狀態,效果也比PID控制和模糊控制的效果好。
發動機曲軸轉速從2000r/min速降到怠速的情況如圖3所示,本文提出的仿人邏輯預測控制器的曲線在下降的過程中能夠比較平緩并且迅速的過度到怠速的目標轉速,穩定性明顯比PID控制和模糊控制的好。整個怠速系統在20s時加入10N外加力矩,仿人邏輯預測控制的控制效果也是比較好的。
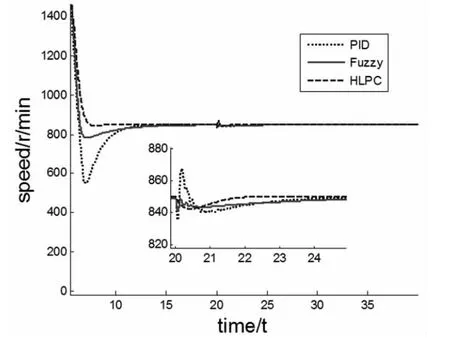
圖3 正常運行到停車怠速的仿真效果圖
4 結論
對汽油發動機怠速控制仿真的研究表明,基于仿人邏輯預測控制策略的怠速控制器與單一的PID,以及模糊控制相比有更好的動態品質,且運行穩定,并在一定程度上解決了預測控制的魯棒性問題,仿真結果對發動機怠速控制的臺架實驗具有指導價值。
[1]楊海燕.汽車發動機怠速控制技術的研究[D].天津:河北工業大學,2007,12,1.
[2]瞿亮,凌民,傅昱,蔡立軍.基于 MATLAB的控制系統計算機仿真[M].北京:清華大學出版社、北京交通大學出版社,2006.
[3]Yang Wang,Anna Steafnopoulou,etc.Idle Speed control:An old problem in a new engine design.Process 2000 ACC,2000:1217-1220[Z].
[4]歐志新.仿人邏輯預測控制器在動態配料系統中的應用研究[D].蘭州:蘭州交通大學,2010,5.
[5]劉筠.基于動態矩陣預測的怠速控制系統仿真設計及其遺傳算法優化[D].杭州:浙江大學,2008,6.
[6]Shu Li,Hong Chen,Nonlinear Model Predictive Control for Idle Speed Control of SI Engine,IEEE CDC and 28thCCC,2009:6590-6595[Z].
[7]溫興賢,田沛,梁艷絨.仿人邏輯預測控制器在主汽壓系統的應用[J].電力科學與工程,2012,5,28(5):50-54.
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
中老年保健(2022年5期)2022-08-24 02:36:04
當代陜西(2021年12期)2021-08-05 07:45:46
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
民用飛機設計與研究(2019年2期)2019-08-05 01:33:40
光學精密工程(2016年6期)2016-11-07 09:07:19
冰雪運動(2016年4期)2016-04-16 05:54:56
劍南文學(2015年1期)2015-02-28 01:15:15
汽車與新動力(2015年1期)2015-02-27 12:11:01