基于滑移率的路面附著系數(shù)估計(jì)
2014-12-23 11:34:34李宣政
科技視界 2014年2期
李宣政
(重慶郵電大學(xué) 汽車電子與嵌入式系統(tǒng)工程研究中心,中國(guó) 重慶400065)
0 引言
以自適應(yīng)巡航、主動(dòng)避撞、ABS控制系統(tǒng)為代表的汽車縱向安全輔助系統(tǒng)對(duì)于改善整體交通環(huán)境、降低交通事故發(fā)生率、提高駕乘舒適性具有重要意義,其安全策略模型直接關(guān)系到系統(tǒng)的功能性、可靠性及用戶認(rèn)可度[1]。當(dāng)路面附著系數(shù)未知時(shí),主動(dòng)安全系統(tǒng)的性能通常無(wú)法充分發(fā)揮[2-3]。如果能夠?qū)崟r(shí)估算出路面峰值附著系數(shù),系統(tǒng)就可以根據(jù)當(dāng)前路況調(diào)節(jié)控制策略,提高車輛安全[4]。
國(guó)內(nèi)外都已經(jīng)在路面附著系數(shù)識(shí)別領(lǐng)域做了很多研究。儀器測(cè)量法利用光學(xué)傳感器、電磁波傳感器等,通過(guò)檢測(cè)路面附著物質(zhì)(如水,冰,雪等)估計(jì)路面附著系數(shù)。該方法的優(yōu)點(diǎn)是,在輪胎接觸路面之前可以預(yù)先估計(jì)路面的附著系數(shù)。缺點(diǎn)是,不能反映影響路面附著系數(shù)的其他因素,如輪胎氣壓、輪胎磨損等[5-6]。該類方法對(duì)經(jīng)過(guò)試驗(yàn)訓(xùn)練的路面具有較好的估計(jì)精度,對(duì)未經(jīng)過(guò)訓(xùn)練的路面則難以得到滿意的效果[7],試驗(yàn)存在可重復(fù)性差、成本較高及影響因素多等問(wèn)題。基于車輛動(dòng)力學(xué)的方法是根據(jù)車輛側(cè)向動(dòng)力學(xué)特性,利用車載GPS估計(jì)輪胎的側(cè)偏角,然后根據(jù)車輛側(cè)向動(dòng)力學(xué)模型估計(jì)路面附著系數(shù)[8]。此方法在車輛側(cè)偏角較小的情況下,難以正確估計(jì)路面附著系數(shù)。
目前,能夠直接測(cè)量路面附著系數(shù)或是輪胎力的傳感器造價(jià)高昂且可靠性較低,因而大多采用估計(jì)的方式獲得。
車輛行駛在不同附著系數(shù)的路面上,滑移率和利用附著系數(shù)表現(xiàn)出不同的關(guān)系。利用這種特性進(jìn)行路面附著系數(shù)識(shí)別是目前各類方法中最具實(shí)用前景的。
車輪滑移率s和利用附著系數(shù)ρ的定義[9]分別為:

式中,ω為輪速,r為車輪半徑,v為車速,F(xiàn)x為地面對(duì)車輪的縱向作用力,F(xiàn)y為地面對(duì)車輪的橫向作用力,F(xiàn)z為車輛垂向載荷。如果忽略輪胎橫向力Fy,則有:

不同附著系數(shù)路面上的s-ρ關(guān)系不同,如圖1所示。圖中μ為對(duì)應(yīng)的路面附著系數(shù),即最大利用附著系數(shù)。
由于爬坡阻力對(duì)車輛的運(yùn)動(dòng)狀況有很大影響,本文將對(duì)已有的基于路面附著系數(shù)和滑移率關(guān)系曲線的路面辨識(shí)方法進(jìn)行改進(jìn),針對(duì)非水平路況,利用路面附著系數(shù)和滑移率的關(guān)系,通過(guò)遞推最小二乘算法實(shí)現(xiàn)了路面附著系數(shù)的實(shí)時(shí)估計(jì)。
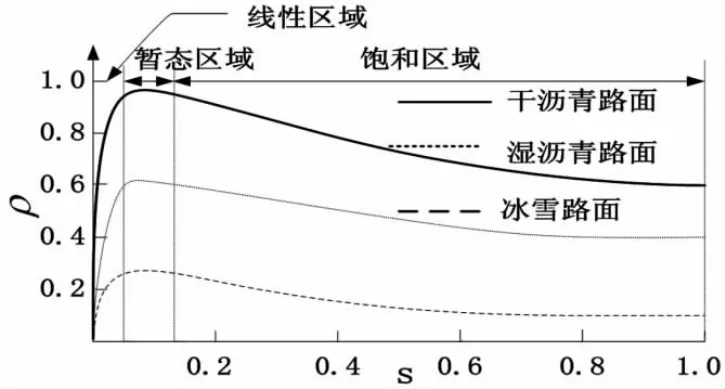
圖1 滑移率與路面附著系數(shù)關(guān)系曲線Fig.1 Slip ratio and road adhesion coefficient curve
1 車輛模型
1.1 車輛縱向動(dòng)力學(xué)模型
車輛在車輪牽引力作用下做直線運(yùn)動(dòng)時(shí),車輛縱向動(dòng)力學(xué)模型如下圖2所示:

圖2 車輛縱向動(dòng)力學(xué)模型Fig.2 Vehicle longitudinal dynamics model
其數(shù)學(xué)方程如下:

式中:m為汽車總質(zhì)量;ax為車輛縱向加速度;Fx為車輛牽引力,是前輪牽引力(左前輪、右前輪)Fxf和后輪牽引力Fxr(左后輪、右后輪)之和,表達(dá)式如下:

Rx為車輛滾動(dòng)阻力,是前輪滾動(dòng)阻力Rxf和后輪滾動(dòng)阻力Rxr之和,表達(dá)式如下:

滾動(dòng)阻力與輪胎法向力成正比,表達(dá)式如下:

其中,i=fl,fr,rl,rr,f為滾動(dòng)阻力系數(shù),β為路面坡度,DA為空氣阻力,與車速的二次方成正比,表達(dá)式如下:

其中:Cd為空氣阻力系數(shù),A為迎風(fēng)面積,ρ為空氣密度,Vx為車輛縱向速度。
1.2 車輛負(fù)載轉(zhuǎn)移模型
輪胎法向載荷可以通過(guò)負(fù)載轉(zhuǎn)移模型獲得,可假設(shè)左前輪與右前輪,左后輪與右后輪的法向載荷分別相等。車輪的法向載荷如下:

其中:Fz,fl,F(xiàn)z,fr,F(xiàn)z,rl,F(xiàn)z,rr分別為左前輪,右前輪,左后輪,右后輪的法向載荷;Lf,Lr分別為車輛質(zhì)心到前軸,后軸的縱向距離;ax為縱向加速度,h為車輛質(zhì)心高度。
2 基于遞推最小二乘法的路面附著系數(shù)估計(jì)
根據(jù)滑移率與路面附著系數(shù)關(guān)系曲線可知,可以按滑移率的大小將車輛行駛狀態(tài)分為3個(gè)階段,分別為線性區(qū)域 (滑移率滿足0≤s<0.05),暫態(tài)區(qū)域(滑移率滿足0.05≤s<0.3),飽和區(qū)域(滑移率滿足0.3≤s<1)。車輛正常行駛過(guò)程中,輪速與車速基本相等,滑移率很小,通常小于0.05,而車輛在加速或者制動(dòng)過(guò)程中,輪胎滑移率和縱向力關(guān)系曲線很快地由線性區(qū)域過(guò)渡到飽和區(qū)域,停留在暫態(tài)區(qū)域的時(shí)間非常短,可以忽略,因此,可僅考慮線性區(qū)域和飽和區(qū)域的路面附著系數(shù)估計(jì)問(wèn)題。
2.1 線性區(qū)域的路面附著系數(shù)估計(jì)
在線性區(qū)域內(nèi),利用附著系數(shù)與滑移率成正比例關(guān)系。在小滑移率區(qū)域的范圍內(nèi),利用附著系數(shù)可以表示為:

利用附著系數(shù)K(μ)為滑移率與路面附著系數(shù)關(guān)系曲線的斜率。在高附著路面上,K(μ)值越大,在低附著路面上,K(μ)值越小。若識(shí)別出剛度系數(shù)K(μ),就能得到路面附著系數(shù)的估計(jì)值。
考慮四輪驅(qū)動(dòng)車輛,將(5)、(6)、(11)代入(4),整理得:

整理為遞推最小二乘的基本形式:

其中,系統(tǒng)輸出觀測(cè)信息:
y(t)=max+mgsinβ+Rxf+Rxr+DA;系統(tǒng)輸入觀測(cè)信息:;待辨識(shí)未知參數(shù):θ(t)=K(μ);e(t)為系統(tǒng)估計(jì)誤差。 通過(guò)辨識(shí)斜率 K(μ),進(jìn)而估計(jì)路面附著系數(shù)。
2.2 飽和區(qū)域的路面附著系數(shù)估計(jì)
當(dāng)滑移率過(guò)大,車輪會(huì)發(fā)生空轉(zhuǎn)或抱死的情況,線性區(qū)域的路面附著系數(shù)估計(jì)方法已不適用,此時(shí)輪胎力已達(dá)飽和,由動(dòng)力學(xué)方程牽引力可以表示為:

將(14)代入(4)式整理得:

整理為遞推最小二乘法的基本形式:

其中,系統(tǒng)輸出觀測(cè)信息:

系統(tǒng)輸入觀測(cè)信息:φ(t)=1;待辨識(shí)未知參數(shù):θ(t)=μ。通過(guò)辨識(shí)μ得到路面附著系數(shù)的估計(jì)。
2.3 遞推最小二乘法的計(jì)算步驟
為了跟蹤時(shí)變參數(shù),提高估算精度,有必要采用遞推最小二乘法。遞推最小二乘法進(jìn)行辨識(shí)時(shí)每獲得一次新的觀測(cè)數(shù)據(jù),就在前一次估計(jì)結(jié)果的基礎(chǔ)上,利用新引入的觀測(cè)數(shù)據(jù),根據(jù)遞推算法對(duì)前一次的估計(jì)結(jié)果進(jìn)行修正,從而獲得新的參數(shù)估計(jì)值。與批處理最小二乘法比,具有計(jì)算量少,節(jié)省計(jì)算機(jī)存儲(chǔ)量等優(yōu)點(diǎn)。帶遺忘因子的遞推最小二乘法具有加強(qiáng)新數(shù)據(jù)提供的信息量、降低舊數(shù)據(jù)對(duì)系統(tǒng)模型無(wú)關(guān)性的影響、防止數(shù)據(jù)飽和等特點(diǎn)。
帶遺忘因子的遞推最小二乘法的計(jì)算步驟如下:
步驟 1:初始化參數(shù) θ(0),P(0),及遺忘因子 λ。
一般取θ(0)=0或極小的數(shù),這里取θ(0)=0,P(0)=106(值越大收斂速度越快),遺忘因子λ取值范圍為0.9<λ<1,這里取0.98;
步驟2:測(cè)量系統(tǒng)輸出y(t),計(jì)算回歸矩陣φ(t);
步驟 3:計(jì)算估計(jì)誤差:e(t)=y(t)-φT(t)θ(t-1);
步驟4:計(jì)算增益矩陣K(t):

步驟6:更新估計(jì)參數(shù)向量:

步驟7:每個(gè)時(shí)間拍重復(fù)步驟2—6。
2.4 Simulink仿真結(jié)果與分析
為了驗(yàn)證路面附著系數(shù)估計(jì)算法的有效性,在Matlab/Simulink仿真環(huán)境下進(jìn)行了驗(yàn)證,車輛參數(shù)如表1所示:

表1 整車參數(shù)設(shè)定

圖3 路面附著系數(shù)為0.2時(shí)的估計(jì)值
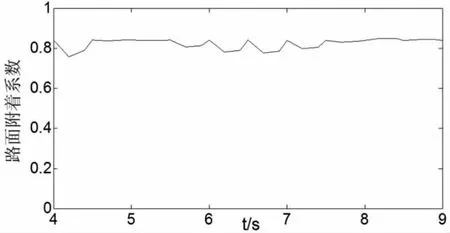
圖4 路面附著系數(shù)為0.8時(shí)的估計(jì)值
分別在路面附著系數(shù)為0.2和0.9的路面上進(jìn)行了仿真驗(yàn)證。初始車速設(shè)為36km/h,路面附著系數(shù)估計(jì)結(jié)果如圖3、圖4所示。從圖3、圖4可以得出,遞推最小二乘估計(jì)算法能夠較為準(zhǔn)確實(shí)時(shí)地估計(jì)出路面附著系數(shù),在路面附著系數(shù)為0.2時(shí),估計(jì)值比0.2稍大,在路面附著系數(shù)為0.8時(shí),估計(jì)值在0.8上下波動(dòng)。由于模型誤差、噪聲干擾等原因,仿真結(jié)果的初始階段出現(xiàn)了一些較大的波動(dòng)現(xiàn)象,其后估計(jì)值比較穩(wěn)定,不影響正常估計(jì)。
3 總結(jié)
本文利用滑移率和路面利用附著系數(shù)之間的關(guān)系,建立車輛縱向動(dòng)力學(xué)模型,通過(guò)遞推最小二乘算法對(duì)路面附著系數(shù)進(jìn)行估計(jì),并在matlab/Simulink環(huán)境下進(jìn)行仿真驗(yàn)證。從仿真結(jié)果上看,遞推最小二乘算法能正確實(shí)時(shí)地估計(jì)出了路面附著系數(shù),驗(yàn)證了算法的有效性。
[1]吳利軍,王躍建.面向汽車縱向安全輔助系統(tǒng)的路面附著系數(shù)估計(jì)方法[J].汽車工程,2009,31(3).
[2]丁惜瀛,張欽爽,覃艷麗.基于轉(zhuǎn)矩分配的電動(dòng)汽車橫擺穩(wěn)定性控制[J].大功率變流技術(shù),2011(5):41-44.
[3]趙林輝,劉志遠(yuǎn),陳虹.一種車輛狀態(tài)的非線性估計(jì)方法研究[J].系統(tǒng)仿真學(xué)報(bào),2009,21(6):1710-1715.
[4]余卓平,左建令.基于四輪輪邊驅(qū)動(dòng)電動(dòng)車的路面附著系數(shù)估算方法[J].汽車工程,2007,29(2):141-145.
[5]Gridsada P.State,parameter,and unknown input estimation problems in active automotive safety applications[D].Minnesota: Univ.of Minnesota,2011.
[6]Phanomchoeng G,Rajamani R.Real-time automotive slip angle estimation with nonlinear observer[C]//Proceedings of the American Control Conference.San Francisco,2011.
[7]MtiUer Steffen,Uchanski Michael,Hedrick Karl.Estimation of the Maximum Tire.Road Friction Coefficient[J].Journal of Dynamic Systems,Measurement,and Control,2003,125:607-617.
[8]Hahn J,Rajesh Rajamani,Lee Alexander.GPS-based real-time identification of tire-road friction coefficient[J].IEEE Transaction on Control Systems Technology,2002,10(3):331-343.
[9]RajeshRajamani,GridsadaPhanomchoeng[J].IEEE/ASME TRANSACTIONS ON MECHATRONIOS,VOL.17,NO.6,DECEMBER 2012.
猜你喜歡
童話王國(guó)·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
今日農(nóng)業(yè)(2021年9期)2021-11-26 07:41:24
發(fā)明與創(chuàng)新·小學(xué)生(2021年3期)2021-03-25 11:48:49
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(bào)(2020年2期)2020-06-02 11:29:24
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19
中國(guó)科技博覽(2016年2期)2016-04-25 20:32:39
小學(xué)生導(dǎo)刊(2016年34期)2016-04-11 00:49:44
核科學(xué)與工程(2015年4期)2015-09-26 11:59:03
電測(cè)與儀表(2015年5期)2015-04-09 11:30:52
