基于PLC的智能車庫管理系統設計
2014-12-25 06:40:20周世強邢長達
科技視界 2014年27期
周世強 邢長達
(安徽理工大學,安徽 淮南232000)
0 引言
隨著科技的進步和我國經濟的飛速發展以及城鎮化建設的加快,我國的車輛大量增加,對停車場的須求日趨增大、要求也越來越高,隨之出現了車輛停放系統管理方式的落后、 自動化和智能化程度低、安全可靠性能比較差、人性化和運行效率低下等一系列問題。 介于這個問題以及現在廣大人民的知識水平的普遍提高和對智能控制系統的進一步了解,使得ITS 的理念更加受到人們的關注和認可。 由于PLC可靠性高,抗干擾能力強,體積小,重量輕,能耗低,系統的設計和建造相對簡單易學,容易維護,容易改造等多方面的原因[1],以PLC 為核心的智能車輛出入庫管理系統得到了很多專業人士的認可和使用,它不僅是智能控制系統中的高技術,更能解決許多普通停車場不能解決的問題和麻煩,也更加準確、安全和更加方便于汽車的停放。
本文在設計中也采用了PLC 技術作為整個設計的核心, 也就是以PLC 為主體對停車場進行了系統設計。 該系統最主要的是對停車場進行智能化和自動化的設計,不僅能實現車輛的自動檢測、車位顯示等功能,而且能夠避免停車場混亂,為車主節約時間和避免交通意外,同時也減輕了停車場工作人員的工作量,提高工作效率,真正實現停車場的高效和智能化。 以防計數出現不必要的錯誤,系統還添加了反復程序校驗,以提高整個系統可靠性。
1 系統主要功能
為讓讀者更好的理解系統功能,下面給出圖1 車輛管理示意圖。
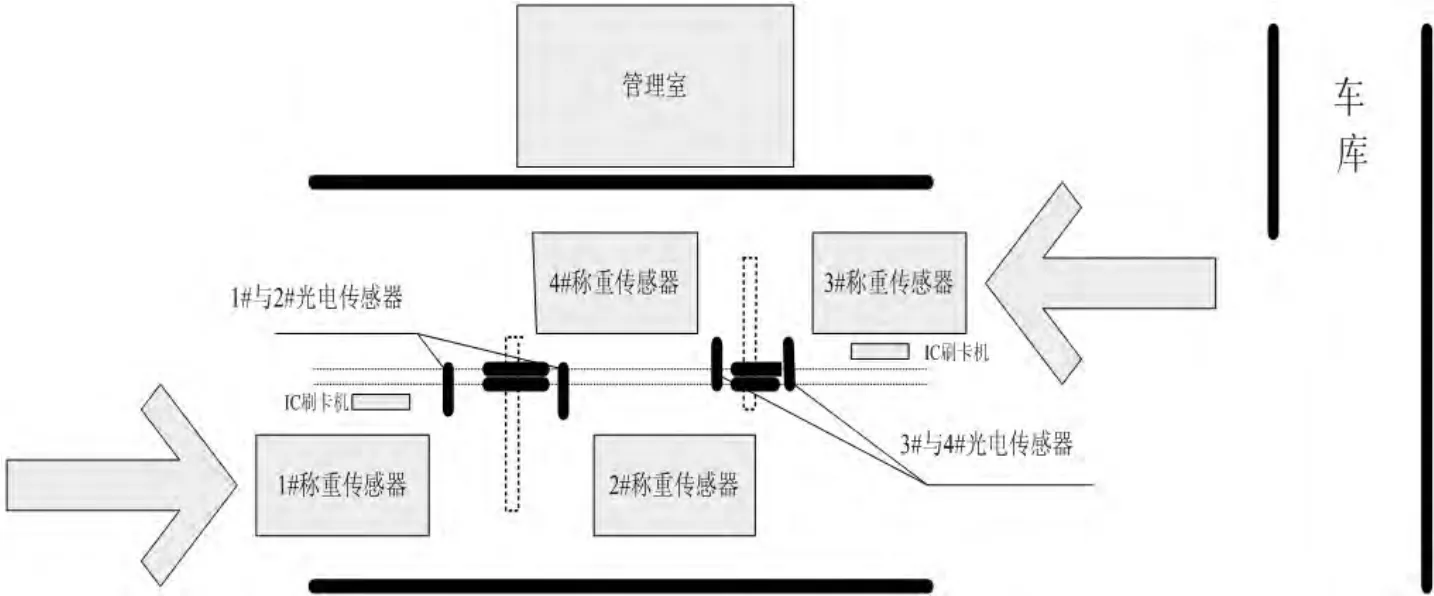
圖1 車輛管理示意圖
1.1 汽車檢測功能
該功能主要借助IC 刷卡器、 光電傳感器和稱重傳感器實現檢測車主信息以及車輛到位情況。 當有車輛進出車庫時,稱重傳感器會檢測到車輛的到位情況,同時車主需要刷IC 卡,PLC 會將從傳感器和刷卡器中接收的信息傳送給上位機,上位機會從數據庫中調出信息與之比較,并向PLC 發出下一步指令,當信息正確時PLC 會控制電機正轉打開道閘放行, 當信息錯誤時會通過蜂鳴器和上位機警示燈進行報警。
1.2 道閘開關功能
該功能主要是通過PLC 驅動電動機的正反轉, 實現道閘的自動開與關。當有車輛觸發1# 稱重傳感器并且通過刷卡器刷卡,當信息檢測通過后,PLC 會控制電機正轉, 打開道閘放行, 當車輛緊接著觸動2# 稱重傳感器后,PLC 會控制電機反轉關閉道閘; 當有車輛出庫時,觸動3# 稱重傳感器并且通過刷卡器刷卡,當信息檢測通過后,PLC 控制電機正轉,道閘打開,當車輛緊接著觸碰4# 稱重傳感器時,PLC 會控制電機反轉關閉道閘。
1.3 車輛計數功能
數是PLC 通過分析光電傳感器采集的信號對寄存器數自動加減。 當有車輛先觸動1# 光電傳感器緊接著觸動2# 光電傳感器時,PLC 寄存器自動加1;當有車輛先觸動3# 光電傳感器再觸動4# 光電傳感器時,PLC 寄存器自動減1。
1.4 車位顯示功能
顯示功能主要由出入口的LCD 屏完成。 主要用來顯示車庫的車位剩余量,通過PLC 軟件編程,用車庫總車位數減去寄存器當前數值所得數即為車位剩余量。 還可以根據用戶的需求在LCD 屏上播放字幕或視頻。
1.5 報警功能
該功能主要應用到蜂鳴器和上位機顯示屏的警示燈。 報警源主要是在車輛檢測時檢測到IC 卡信息錯誤[2-3]。
2 系統硬件設計
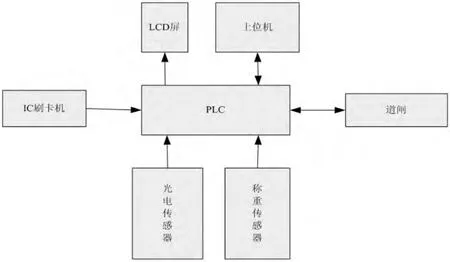
圖2 系統硬件圖
光電傳感器采用DYW-B80 系列的慢反射傳感器,最遠檢測距離為5 米,電源所用電壓范圍很寬,直流范圍是10V-36V ,交流范圍是90V-250V,。 該型號擁有以下特點:重復精度高、響應頻率快、抗干擾性強、耐高溫、防水性能好、使用壽命長、安裝調試方便、性價比高。
稱重傳感器選用BWJ-CYB-605S-橋式稱重傳感器,該型號傳感器具有可靠的密封結構,寬量程,高精度,性能比較穩定,并且具有很強的抗偏和抗扭能力。 電壓10~24V DC, 輸出靈敏度≈2.0mV/V、4~20mA、1~5V,工作溫度范圍-35~85℃,極限過載能力200%FS。
刷卡機采用捷順的JSKT6022-LTIV 型, 該型號內置安裝了1130讀卡器,不用安裝中遠距離讀頭,自身擁有中遠距離讀卡的功能,而且具有雙頻特性,簡潔、美觀,可擴展外接低頻觸發器1131,擴大或控制有源卡的讀卡范圍。
道閘采用捷順的JSDZ004,它具有雙重機械自鎖功能、斷電手動開閘功能、時間保護功能、壓力電波防砸車功能、遙控開關閘功能和工作溫度控制功能等。
顯示模塊由15.6 寸的優派顯示屏完成, 該屏的比例是現在主流的16:9,功率低,且分辨率高。
限于篇幅下面只給出上位監控系統圖如圖3,不做詳細解釋。
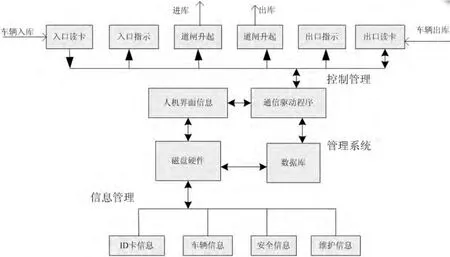
圖3 上位監控系統
3 系統軟件設計
圖4為軟件控制的流程圖,上電以后系統處于復位狀態,其他模塊被初始化。 由圖可以看到,該系統可以選擇自動和手動兩種工作狀態,當選用手動狀態時,通過觸摸屏控制道閘的開關。當有車輛進入時按下觸摸鍵命令PLC 帶動電機正轉打開道閘, 車輛通過后再按下觸摸鍵命令PLC 帶動電機反轉關閉道閘, 與此同時當車輛先后經過1#和2# 光電傳感器后PLC 寄存器自動加1; 當有車輛出庫時按下觸摸鍵命令PLC 帶動電機正轉打開道閘, 車輛通過后再按下觸摸鍵命令PLC 帶動電機反轉關閉道閘,與此同時當車輛先后經過3# 和4# 光電傳感器后PLC 寄存器自動減1。
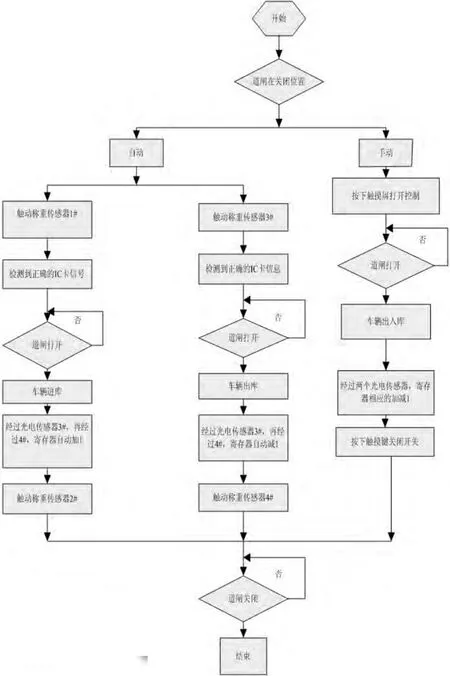
圖4 系統流程圖
選擇自動模式,當有車輛觸動1# 稱重傳感器準備進庫,并且通過檢測后,PLC 會控制電機正轉打開道閘,車輛進庫,與此同時當車輛先后經過1# 和2# 光電傳感器后PLC 寄存器自動加1; 有車輛觸動3# 稱重傳感器并通過檢測,PLC 將控制電機正轉打開道閘,與此同時當車輛先后經過3# 和4# 光電傳感器后PLC 寄存器自動減1。
4 總結
本文以PLC 作為系統的控制核心,并結合現在的高新技術,將先進的信息技術、計算機、通信、自動控制、人工智能以及電子技術等有效地結合運用在停車場智能管理體系中,建立起一種在全方位發揮作用的準時、快捷、高效的停車智能管理體系,具有高度的智能化和自動化,同時具有極高的安全可靠性。該系統實現了自動檢測、自動收費、道閘自動控制和故障報警等功能,滿足各種大中型停車場的智能化要求。
[1]姚偉紅.城市交通面臨的問題及解決途徑[J].山西交通科技,2007.
[2]曹建軍,史忠科.小區停車場智能管理系統設計[J].計算機工程與應用,2009.
[3]蔡紀鶴,趙德安.智能小區停車場管理系統的設計[J].電氣應用,2008.
猜你喜歡
中華詩詞(2022年6期)2022-12-31 06:41:24
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
文苑(2018年23期)2018-12-14 01:06:06
文苑(2018年19期)2018-11-09 01:30:14
文苑(2018年17期)2018-11-09 01:29:26
文苑(2018年21期)2018-11-09 01:22:32
中國科技論壇(2017年7期)2017-07-25 08:49:53
海峽科技與產業(2016年3期)2016-05-17 04:32:12
