基于載波平滑的電離層誤差技術研究
2014-12-26 02:07:00呂超李斌
科技視界 2014年4期
關鍵詞:用戶
呂超李斌
(中國電子科技集團公司 第二十研究所,陜西 西安710068)
0 介紹
GPS系統作為高精度的全球導航定位系統,已經成為軍用、民用導航、測量定位的主要技術手段,但是在應用GPS技術進行高精度導航定位測量中,地球電離層對GPS導航電文造成的時間延遲在最惡劣的條件下可達到300ns左右。為了消除電離層的影響,通常采用的方法有:數學模型估計電離層延遲、載波平滑碼偽距結合差分技術等等,數學模型消除電離層影響通常用于單點絕對定位,可粗略的消除電離層延遲誤差,而載波平滑偽距差分技術可大大降低電離層延遲誤差的影響,但是在平滑過程中將會引入額外的算法誤差,此誤差量級在1~2米。本文首先簡單介紹數學模型經驗公式和差分法消除電離層延遲,然后通過數學推演計算出額外的算法誤差的數學表達式,并在傳統的差分技術中予以消除,以提高定位精度。
本文由五部分組成,第一節給出應用背景和現有研究的介紹,第二節給出非差電離層修正模型,第三節給出單頻差分電離層修正算法,包括靜態差分電離層修正和動態差分電離層修正,并分析分析載波平滑和運動速度對電離層修正值的影響,本文結論將在第四節予以總結。
1 非差電離層修正
對于單點絕對定位,當使用單頻接收機時,由于單頻接收機無法利用觀測量的值解算出兩個頻點上的電離層延遲,因此只能借助一些數學模型來估算、校正電離層延遲。單頻接收機垂直方向電離層延遲模型的數學表達式為:

傾斜方向的電離層延遲為:
2 單頻差分電離層修正
2.1 靜態差分電離層修正

其中:Δx表示基準站A與用戶站B對應的刺穿點之間的距離。當用戶站從自己的偽距中消除掉基準站播發的修正值后,在將上述殘余電離層延遲消除掉。
圖1 差分系統原理
2.2 動態載波平滑電離層修正
2.2.1 載波平滑算法
載波相位平滑碼偽距的主要目的是利用低噪聲的載波相位觀測量來降低碼偽距的多路徑和熱噪聲。
對每個接收機通道(接收機u和衛星i),在歷元k,使用具有時間常數τ的濾波器,采樣間隔T:

其中:
N=τ/T,ρ′表示平滑偽距。
將(2)載波平滑公式改寫為下式:

2.2.2 載波平滑后電離層延遲
由于基準站在發送修正值前以及用戶站在使用偽距定位前都需對偽距進行上述載波相位平滑,而上述載波相位平滑后的電離層延遲與未平滑的原始偽距不同,深層次的原因是載波相位和碼偽距的電離層延遲符號相反,因此在差分單點定位中,需進行考慮。
設載波平滑偽距方程式為:

原始偽距觀測方程式為:

其中,R(k)表示真實幾何距離,接收機鐘差,衛星鐘差,對流層延遲,星歷誤差之和,θ(k)表示由于載波相位平滑所引起的電離層延遲改變量,ε^(k)表示載波平滑偽距的多路徑,熱噪聲誤差,ε(k)表示原始偽距的多路徑熱噪聲誤差。

由于載波相位的多路徑及熱噪聲誤差相對于偽距很小,可以忽略。故(6)中沒寫出。
為了分析 θ(k)的大小及影響方式,將式(4)、(5)、(6)代入式(3),可得:
整理可得:

令:
設移動用戶在k時刻處于a點對應的電離層為Ia(k),k+Δt時刻處于b點,對應的電離層為Ib(k+Δt),這樣式(9)可變換為:
(10)式兩邊令Δt→0取極限,可得載波平滑后電離層變化量的微分方程式:

這是一個非齊次一階為非方程,采用待定系數法求解,得到平滑誤差:

設電離層時間梯度為k1,即:
我們忽略其他因素的的影響包括多路徑熱噪聲、空間梯度和解的初始值。依據公式(10)得到時間梯度在載波平滑過程中引起的電離層額外誤差,該誤差可表示為:

隨著時間的推移,該公式表示此額外誤差會趨近于一個常數,該常數為負的兩倍電離層時間梯度和時間常數的乘積,到達穩態時,該誤差為:

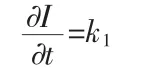
平滑后的電離層誤差殘差隨時間的變化如圖 2,其中電離層時間梯度為5mm/s.,其中空間梯度為0.
圖2 τ=200s平滑后電離層誤差殘差隨時間的變化,其中空間梯度為0
下面我們分析電離層空間梯度的影響。設電離層空間梯度為:
同樣的,我們忽略其他因素包括多路徑熱噪聲、時間梯度和解的初始值。根據公式(12)得到空間在載波平滑過程中引起的電離層額外誤差,該誤差可表示為:

到達穩定狀態時此額外誤差可表示為:

平滑后的電離層誤差殘差隨時間的變化如圖 3,其中電離層空間梯度為1.25cmm/km,用戶速度為300m/s,時間梯度為0。
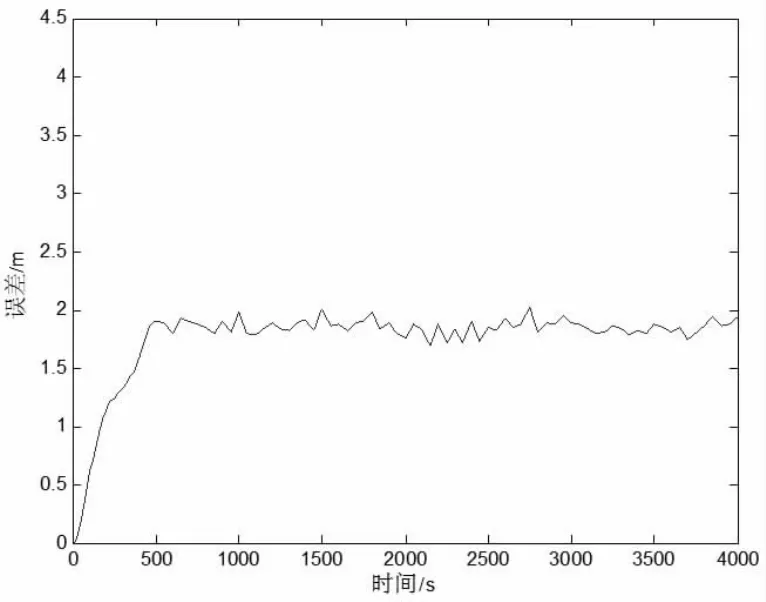
圖3 平滑后電離層誤差殘差隨時間的變化,其中時間梯度為0
從該公式中可以看出,電離層空間梯度對高速用戶的影響更大,而對于靜止用戶沒有影響。
綜合以上分析我們可得運動用戶采用載波相位平滑偽距修正時,由于載波相位所引起的殘余電離層誤差總的表達式為
其中,Fpp表示傾斜因子,將垂直電離層延遲轉化為傾斜電離層延遲,具體表達式為:
R為地球橢球體半徑取6378.1363km,h為電離層平均高度取350km,見圖 4。

圖4 區域電離層關系示意圖
3 結論
通過本文算法研究可見,非差分的電離層延遲一般通過經驗公式估計得出,而靜態差分后電離層延遲誤差將大大減小,其值與電離層空間梯度和基準站和移動站的相對距離有關。對于動態載波相位平滑偽距后,其電離層修正量的值與載波平滑的濾波時間和用戶運動速度有關。
[1]薛瑞.GBAS算法研究報告[M].北京:北京航空航天大學.
[2]謝剛.GPS原理與接收機設計[M].北京:電子工業出版社,2011,07.
[3]王剛,姬劍鋒,馮來平,等.EGNOS電離層延遲改正數分析[J].西安:西安測繪研究所衛星導航定位實驗室,2004,06.
[4]Jock R.I.Christie,Ping-Ya Ko,Andrew Hansen etc.The Effects of Local Ionospheric Decorrelation on LAAS:Theory and Experimental Results[C]//ION NTM-99.California January 1999.
[5]余明,郭標明,過靜珺.GPS電離層延遲Klobuchar模型與雙頻數據的解算值的比較與分析[J].測繪通報,2004(06).
猜你喜歡
車主之友(2022年4期)2022-08-27 00:58:26
知音·下半月(2022年5期)2022-05-23 23:17:04
商用汽車(2016年11期)2016-12-19 01:20:16
商用汽車(2016年5期)2016-11-28 09:55:15
非公有制企業黨建(2016年1期)2016-07-19 13:02:51
商用汽車(2016年6期)2016-06-29 09:18:54
商用汽車(2016年4期)2016-05-09 01:23:12
衛星與網絡(2016年12期)2016-02-05 09:23:23
創業家(2015年10期)2015-02-27 07:55:08
創業家(2015年10期)2015-02-27 07:54:39
