基于PC104的嵌入式組合導航系統設計
2015-01-01 02:22:34盧曉東顧培培
船舶與海洋工程 2015年5期
王 其,蔣 平,李 嚴,盧曉東,顧培培
(1. 南京信息工程大學 江蘇省網絡監控中心,南京 210044;2. 南京信息工程大學 計算機與軟件學院,南京 210044)
0 引 言
捷聯慣性導航系統的三軸陀螺儀和加速度計直接垂直安裝在運載體上,陀螺儀和加速度計分別提供運載體角運動信息和線運動信息,是一種高精度的實時定位系統,在實際應用中具有高自主性、體積小、重量輕、成本低、高可靠性和輸出信息量全等優點,這些性能的實現越來越多地要求集中在硬件上,即如何選擇和構建慣性導航系統硬件系統,使得系統在運行中實現高精度、穩定性和實時性。硬件系統的物理實現需滿足結構緊湊、體積小、重量輕、功耗小、成本低、精度高和運算速度快等特點。基于PC104的嵌入式并行船舶組合導航系統是慣性組合導航系統,其優良的性能特點適應了導航系統的發展趨勢[1]。
1 系統硬件總體結構
為了滿足船舶小型化嵌入式運行環境、精度高、實時性好、運算速度快等要求,在綜合研究各種硬件結構的并行處理系統的基礎上,采用PC104為主控機的嵌入式并行共享存儲型結構。該方案軟硬件設計通用性強且外圍電路少。
導航系統硬件設計結構見圖1。采用PC104作為控制中心,TMS320C6713DSP數據處理單元實現了系統的并行處理功能,主要用于捷聯算法以及信號處理;通過雙口RAM實現PC104與DSP之間的數據交換,使得系統運行效率大大提高。
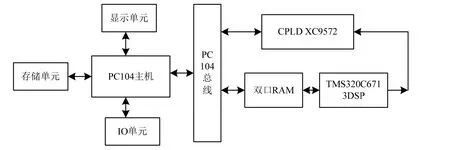
圖1 系統硬件設計結構
嵌入式并行處理系統中,作為系統控制核心的嵌入式計算機采用PC104CPU模塊CoreModule-800E,該嵌入式系統模塊與傳統計算機軟件兼容性較好,可以完成DSP的啟動、運行及DSP的通信任務;雙口RAM采用CY7C028,它是64K*16的低功耗CMOS型靜態雙口RAM,最大訪問時間為12ns,可以承擔PC104主機與DSP之間的數據交換的基本任務;DSP芯片采用TMS320C6713,完成復雜的捷聯姿態解算和信息融合算法,是32位高速浮點型DSP,時鐘頻率為300MHz。采用標準IDE接口大容量硬盤作為存儲單元;高性能的CPLD器件XC9572編程產生控制邏輯信號,具有+5V單電源在線編程和擦除,可編程次數超過1萬次,時鐘速度達到125MHz[2,3]。
2 數據采集模塊
慣性測量單元由3個光纖陀螺儀和3個撓性石英加速度計組成,用于提供載體的角速率和加速度信息。采用串口直接接收光纖陀螺儀和GPS模塊輸出的數字信號。石英加速度計輸出為模擬信號,必須進行放大預處理、濾波平滑后再由模數轉換器轉換為數字信號。設計小型嵌入式導航計算機模擬信號采集的原理結構見圖2。綜合模數轉換器的分辨率和轉換速度兩個性能指標,導航系統數據采集采用三通道并行數字讀出方案,即三通道并行讀取三軸加速度輸出信息,減少了通道之間的相互干擾,同時可以滿足不同精度、不同讀出速度的要求。該方案首先用運算放大器對經過精密電阻采樣的加速度計信號進行放大,然后由ADC進行信號的模數轉換,再由采用FPGA作為PC104處理器與模數轉換器ADS1210之間的接口,將3個模數轉換器并行轉換的結果同時讀入處理器。
石英撓性加速度計輸出是電流信號,精密電阻采樣可以將加速度計輸出的電流信號轉換為電壓信號。采樣電阻會對信號產生衰減作用并引入噪聲,應根據系統分辨的信號精密選擇采樣電阻。抗混疊濾波是要去除測量信號中的干擾信號、系統內部和外部的干擾信號。當被測信號很微弱時,就有可能被干擾噪聲所淹沒,導致很大的數據采集誤差,由RC濾波器完成濾波功能[4]。放大器采用精密儀表放大器INA118,具有高精度、低功耗、高共模抑制比和寬工作頻帶等優點,適合對各種小信號進行放大[5]。ADS1210是一種高精度、寬動態范圍,采用單一+5V電源供電,具有24位精度的新型AD轉換器件,采用串行數據傳送方式,轉換速度可由指令設定。模數轉換器ADS1210內部的可編程增益放大器也可通過指令設定,對不同幅度的輸入信號實現不同倍數的放大, ADS1210通過對命令寄存器TMR(Turbo Mode Rate)參數設定不同的值并改變采樣頻率,采樣頻率的變化將對結果產生直接的影響[5]。
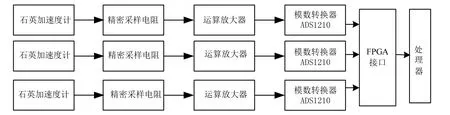
圖2 加速度計數據采集電路
3 雙口RAM模塊設計
系統采用雙口RAM來實現PC104主機與TMS320C6713DSP之間共享同一段內存地址,從而實現高速數據交換。
雙口RAM是系統的共享存儲器,也是高速數據交換通道,雙口RAM承擔了PC104與6713DSP之間的數據交換任務,系統的硬件平臺采用的雙口RAM是CY7C028 64K*16的CMOS雙端口靜態RAM。雙口RAM內部存儲單元可同時異步訪問,但兩側不能同時訪問同一地址單元,這就是雙口RAM芯片結構上存儲數據共享的特點。
雙口RAM CY7C028的數據總線、地址總線、控制總線均具有完全獨立的兩套,由XC9572 CPLD來管理其控制權,使CY7C028的數據總線、地址總線和控制總線在DSP和PC104主機之間切換,從而完成數據在PC104主機和6713DSP之間的高速交換,CPLD邏輯譯碼電路(見圖3)。
CY7C028的右端口輸出使能引腳與DSP的RD引腳相連,當DSP從雙口RAM中讀取數據,就發送高電平脈沖信號到RD端引腳,選中雙口RAM并設置為允許輸出狀態,此時TMS320C6713DSP就可以從雙口RAMCY7C028內存單元讀取數據。由XC9572CPLD經過硬件程序譯碼產生右端片選信號,DSP選中右端口的地址總線、數據總線和控制總線,進行相關讀寫操作。DSP的寫引腳利用低電平信號驅動CY7C028雙口RAM寫芯片引腳為低,配合CPLD地址譯碼完成DSP往雙口RAM中寫數據。
CY7C028左側端口雙口RAM的芯片輸出使能引腳由PC104主機的SMEMR讀數據引腳驅動,一旦PC104對CY7C028雙口RAM有讀數據請求,CY7C028的左端口就被設置為輸出狀態,隨時準備外部數據總線讀取內部數據。片選信號由XC9572CPLD譯碼產生,PC104通過將寫引腳設置為低電平來驅動CY7C028雙口RAM左端口寫控制引腳低電平信號,從而完成CY7C028雙口RAM芯片內存地址的寫操作[6]。
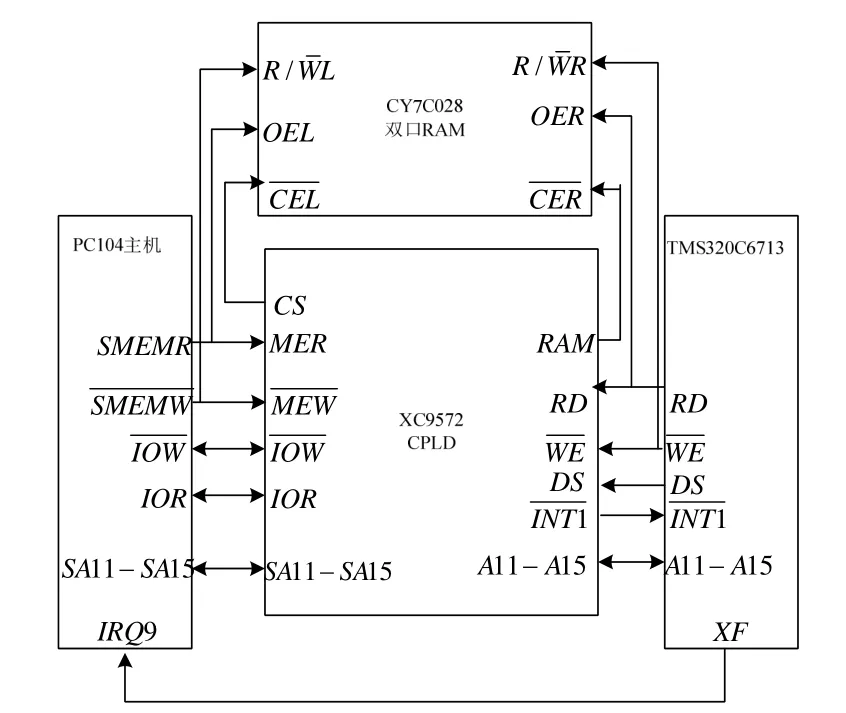
圖3 CPLD邏輯譯碼電路
4 系統軟件設計
針對船舶導航系統的小型化、嵌入式并行處理的特點,設計系統程序流程見圖4。系統程序流程圖包括導航系統自檢模塊、導航初始數據裝訂模塊、導航初始對準模塊、捷聯解算模塊和GPS信息融合模塊[7,8]。
導航系統上電運行后,導航計算機和各傳感器自檢并輸出相應的信息,如果自檢正常,接受發送的初始經、緯度信息、速度信息以及姿態信息并進行驗證,確認信息正確后進行初始對準、導航解算和信息融合濾波。最后將采集得到的原始數據和導航計算機運算得到的信息傳送給控制計算機,以供后期數據分析使用[9]。
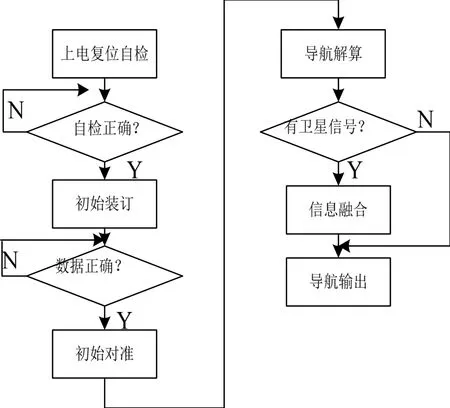
圖4 導航軟件流程
5 系統測試實驗
在實驗室環境下測試導航計算機的性能。陀螺儀和加速度計的零位漂移分別為0.1°/h和0.001m/s2。慣性測量單元在GPS信號輔助下組合導航系統靜態實驗,此時在導航計算機中存儲有捷聯算法和相應的信息融合算法,慣性測量單元安裝在三軸轉臺上,采用速度+位置匹配的組合導航方式,由于GPS校正作用,系統位置誤差呈現收斂,誤差始終保持在1.5m范圍內,具有較高的定位精度。克服了慣性測量單元誤差呈發散缺點。
6 結 語
基于PC104的嵌入式并行導航計算機,采用嵌入式并行多處理器結構,脫離了傳統的計算機平臺,設計了高精度數據采集電路,雙口RAM并行數據傳送模式和CPLD接口電路設計,實驗室三軸轉臺實驗證明所設計的系統能夠滿足高精度、小體積、實時性、低功耗等要求,為實現船舶導航計算機小型化具有實際意義。
[1] 王 其,徐曉蘇. 基于浮點DSP+ARM的光纖捷聯/GPS組合導航計算機的設計[J]. 船舶工程,2007, 29 (5): 34-37.
[2] 梁海波,司文杰,劉志華,等. 基于SOPC的MEMS組合導航儀的設計與實現[J]. 航天控制,2014, 32 (2): 3-8.
[3] 閆 捷,徐曉蘇,張 濤,等. 艦載小型化SINS/GNSS緊組合導航系統設計[J]. 中國慣性技術學報,2013, 21 (6): 775-780.
[4] 李錦明,李娜娜,馬游春. 基于高精度 A/D的石英撓性加速度計數據采集的設計[J]. 儀表技術與傳感器,2012, 51(2):775-780.
[5] 張 霆. 基于PC/104總線的多DSP并行處理系統及其應用[D]. 南京:東南大學,2006.
[6] 龔 輝. 基于高性能DSP的捷聯信息處理硬件平臺設計與實現[D]. 哈爾濱:哈爾濱工程大學,2007.
[7] Lubin Chang, Baiqing Hu, An Li, et al. Strapdown inertial navigation system alignment based on marginalized unscented Kalman fiter [J]. IET Science, Measurement and Technology, 2013, 7 (2): 128-138.
[8] Mahdi Jafari, Tooraj Abbasian Najafabadi, Behzad Moshiri, et al. PEM stochastic modeling for MEMS inertial sensors in converntional and redundant IMUs [J]. IEEE Sensors Journal, 2014,14 (6): 2019-2027.
[9] Michaein, Matej Hoffmann. Dead reckoning in a dynamic quadruped robot based on multimodal proprioceptive sensory information [J]. IEEE Transactions on Robotics, 2013, 29 (2): 563-572.
猜你喜歡
小學科學(學生版)(2021年7期)2021-07-28 06:44:42
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
科技傳播(2019年22期)2020-01-14 03:06:34
電子制作(2018年11期)2018-08-04 03:25:42
鐵道通信信號(2018年2期)2018-04-18 12:18:23
消費導刊(2017年20期)2018-01-03 06:26:40
電鍍與環保(2016年3期)2017-01-20 08:15:32
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
衡陽師范學院學報(2015年3期)2015-02-10 06:02:23
