基于參數(shù)敏感性的渦輪平面葉柵多目標(biāo)優(yōu)化設(shè)計(jì)
2015-01-06 02:47:36賴巍李劍白張劍
燃?xì)鉁u輪試驗(yàn)與研究 2015年1期
賴巍,李劍白,張劍
(中國(guó)燃?xì)鉁u輪研究院,四川成都610500)
基于參數(shù)敏感性的渦輪平面葉柵多目標(biāo)優(yōu)化設(shè)計(jì)
賴巍,李劍白,張劍
(中國(guó)燃?xì)鉁u輪研究院,四川成都610500)
渦輪葉片平面葉柵優(yōu)化方法借鑒已有研究成果,綜合考慮了造型方法、性能評(píng)估方法、優(yōu)化方法三個(gè)關(guān)鍵環(huán)節(jié),在iSIGHT平臺(tái)下完成了葉柵優(yōu)化過(guò)程集成,建立了適合工程應(yīng)用的渦輪葉柵多目標(biāo)優(yōu)化設(shè)計(jì)系統(tǒng)。以高壓渦輪導(dǎo)葉中截面為例,從參數(shù)敏感性、反設(shè)計(jì)及多目標(biāo)優(yōu)化三個(gè)方面,對(duì)優(yōu)化方法進(jìn)行了較為深入的分析。結(jié)果表明,該方法可快速有效地優(yōu)化渦輪葉柵流場(chǎng)和性能。
渦輪葉片;參數(shù)敏感性;反設(shè)計(jì);多目標(biāo)優(yōu)化;優(yōu)化算法;工程應(yīng)用
1 引言
傳統(tǒng)的渦輪葉片平面葉柵設(shè)計(jì),首先根據(jù)初始葉片進(jìn)行流場(chǎng)計(jì)算,分析計(jì)算結(jié)果,然后按照經(jīng)驗(yàn)修改葉型設(shè)計(jì)參數(shù),不斷重復(fù)該過(guò)程,直至得到滿意葉型,故其設(shè)計(jì)周期長(zhǎng)、工作量大。近年來(lái),平面葉柵設(shè)計(jì)借助數(shù)值優(yōu)化方法大大縮短了設(shè)計(jì)周期,提高了設(shè)計(jì)效率。
國(guó)內(nèi)外專家、學(xué)者在平面葉柵優(yōu)化方面進(jìn)行了大量研究,并取得豐碩成果。如Janus等[1]采用基于步長(zhǎng)的氣動(dòng)敏感性分析新方法,對(duì)渦輪葉型局部進(jìn)行優(yōu)化。Jha[2]采用13個(gè)控制點(diǎn)的Bezier曲線進(jìn)行渦輪葉片造型設(shè)計(jì),并采用Kreisselmeier-Steinhaus?er(K-S)算法進(jìn)行優(yōu)化。尚仁超等[3]采用參數(shù)造型法和Bezier曲線進(jìn)行葉片初步造型,并利用多目標(biāo)遺傳算法和序列二次算法組合優(yōu)化算法進(jìn)行優(yōu)化。Li等[4-5]研究了渦輪葉片的反設(shè)計(jì)優(yōu)化方法,該方法將基于控制理論的形狀優(yōu)化設(shè)計(jì)作為一種基于梯度的優(yōu)化方法。
葉柵優(yōu)化包括造型方法、性能評(píng)估方法和優(yōu)化方法三個(gè)關(guān)鍵環(huán)節(jié),而上述成果都只偏重于其中某一環(huán)節(jié)的方法研究。本文借鑒已有研究成果,綜合考慮上述關(guān)鍵環(huán)節(jié),葉柵造型采用更適合工程應(yīng)用的Bezier曲線參數(shù)化造型方法[6],性能評(píng)估使用可靠的葉柵流場(chǎng)分析工具S1IC[7],優(yōu)化方法綜合考慮了正問(wèn)題和反問(wèn)題,最終在iSIGHT平臺(tái)下對(duì)葉柵優(yōu)化過(guò)程進(jìn)行集成,建立適合工程應(yīng)用的渦輪葉柵多目標(biāo)優(yōu)化設(shè)計(jì)系統(tǒng),并在此基礎(chǔ)上從工程應(yīng)用角度對(duì)優(yōu)化方法進(jìn)行了較為深入的討論。
2 渦輪平面葉柵數(shù)值方法
2.1 葉柵參數(shù)化造型方法
采用三條Bezier曲線控制葉柵型線,葉盆一條,葉背兩條。三段Bezier曲線除去端點(diǎn)外,需要6個(gè)葉柵型線控制參數(shù),如圖1所示。除此之外,基本的葉柵幾何參數(shù)共12個(gè),包括進(jìn)口結(jié)構(gòu)角、前緣直徑、尾緣直徑、有效出氣角、尾緣折轉(zhuǎn)角、前楔角、后楔角、安裝角、弦長(zhǎng)、葉片數(shù)、截面半徑、尾緣調(diào)節(jié)系數(shù)等。

圖1 葉柵參數(shù)示意圖Fig.1 The schematic diagram of cascade parameters
該葉柵參數(shù)化設(shè)計(jì)方法精確控制了葉柵喉部尺寸,保證了吸力面喉部型線的曲率連續(xù)。與傳統(tǒng)的造型曲線(如雙扭線、拋物線等)相比,這種方法可更有效地調(diào)節(jié)型線,非常適合渦輪葉柵造型設(shè)計(jì)。
2.2 平面葉柵繞流計(jì)算方法
采用S1IC程序包進(jìn)行流場(chǎng)計(jì)算。在該程序包中,利用ICEM CFD生成高質(zhì)量的三維網(wǎng)格,通過(guò)輸入y+控制附面層網(wǎng)格,分別控制葉型各個(gè)位置的網(wǎng)格數(shù)量及分布;根據(jù)給定的邊界條件和求解控制參數(shù),自動(dòng)導(dǎo)入CFX中進(jìn)行前處理、求解和后處理等操作,輸出等熵馬赫數(shù)分布、性能參數(shù)、速度矢量圖、馬赫數(shù)等值線圖等。
S1IC程序包的計(jì)算網(wǎng)格如圖2所示,具有葉柵壁面附近網(wǎng)格正交性好、網(wǎng)格中不存在畸形點(diǎn)等優(yōu)點(diǎn),流場(chǎng)計(jì)算易收斂,且具有較高的計(jì)算精度。
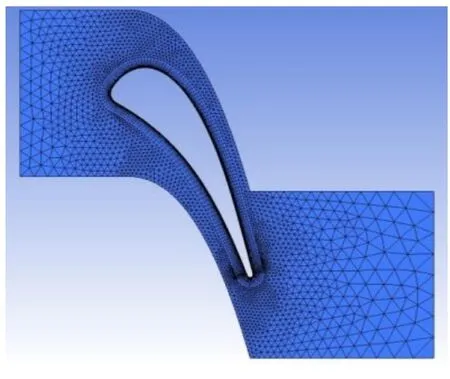
圖2 S1IC程序包計(jì)算網(wǎng)格Fig.2 The calculation mesh of S1IC
利用高壓渦輪導(dǎo)葉根截面葉柵對(duì)S1IC程序的計(jì)算精度進(jìn)行校核。圖3為計(jì)算與試驗(yàn)的表面等熵馬赫數(shù)對(duì)比,性能參數(shù)對(duì)比見(jiàn)表1,可見(jiàn)二者吻合較好,計(jì)算所得損失系數(shù)與試驗(yàn)值接近。
3 渦輪平面葉柵優(yōu)化設(shè)計(jì)集成
圖4為平面葉柵優(yōu)化設(shè)計(jì)流程圖。首先選定優(yōu)化策略,根據(jù)優(yōu)化策略給定優(yōu)化樣本。其次,根據(jù)給定樣本進(jìn)行葉片參數(shù)化造型,判斷造型結(jié)果是否滿足約束條件;滿足約束后,進(jìn)行流場(chǎng)計(jì)算,得出葉片表面等熵馬赫數(shù)分布及性能參數(shù);對(duì)葉面等熵馬赫數(shù)分布與理想分布曲線進(jìn)行比對(duì),評(píng)估差異,并與性能參數(shù)進(jìn)行綜合,獲得優(yōu)化目標(biāo)函數(shù)。最后,待滿足收斂條件后,終止迭代,得到最優(yōu)結(jié)果。據(jù)此流程,集成葉片造型程序,葉柵繞流計(jì)算程序及反設(shè)計(jì)模塊后的平面葉柵優(yōu)化平臺(tái)見(jiàn)圖5。
4 渦輪平面葉柵優(yōu)化方法研究
渦輪平面葉柵優(yōu)化過(guò)程,主要涉及設(shè)計(jì)變量、葉柵參數(shù)約束、優(yōu)化算法及優(yōu)化目標(biāo)的選取。在優(yōu)化變量選取上,不同優(yōu)化設(shè)計(jì)變量變化范圍對(duì)優(yōu)化結(jié)果影響不同,總存在某些變量,優(yōu)化結(jié)果對(duì)其非常敏感;還需要對(duì)葉柵參數(shù)進(jìn)行約束,以滿足結(jié)構(gòu)、強(qiáng)度設(shè)計(jì)要求,同時(shí)保證不出現(xiàn)畸形葉片;渦輪葉柵的氣動(dòng)優(yōu)化設(shè)計(jì)是典型的非線性、多峰值優(yōu)化設(shè)計(jì)問(wèn)題,不同優(yōu)化算法其優(yōu)化設(shè)計(jì)收斂過(guò)程不同,故需選取最佳優(yōu)化設(shè)計(jì)算法。能量損失系數(shù)是葉柵性能的重要衡量指標(biāo),同時(shí)考慮到葉柵反設(shè)計(jì)通過(guò)約束葉面等熵馬赫數(shù)分布來(lái)優(yōu)化葉柵,較為適合工程應(yīng)用,所以將兩者綜合,作為優(yōu)化目標(biāo)。因此,需要研究渦輪平面葉柵優(yōu)化設(shè)計(jì)過(guò)程中的參數(shù)敏感性、優(yōu)化設(shè)計(jì)算法、多目標(biāo)優(yōu)化方法等,為渦輪平面葉柵優(yōu)化設(shè)計(jì)提供最佳的優(yōu)化方法。
以高壓渦輪導(dǎo)葉中截面(高跨聲速葉柵)為例,對(duì)上述方法進(jìn)行具體分析。葉柵主要參數(shù)見(jiàn)表2。
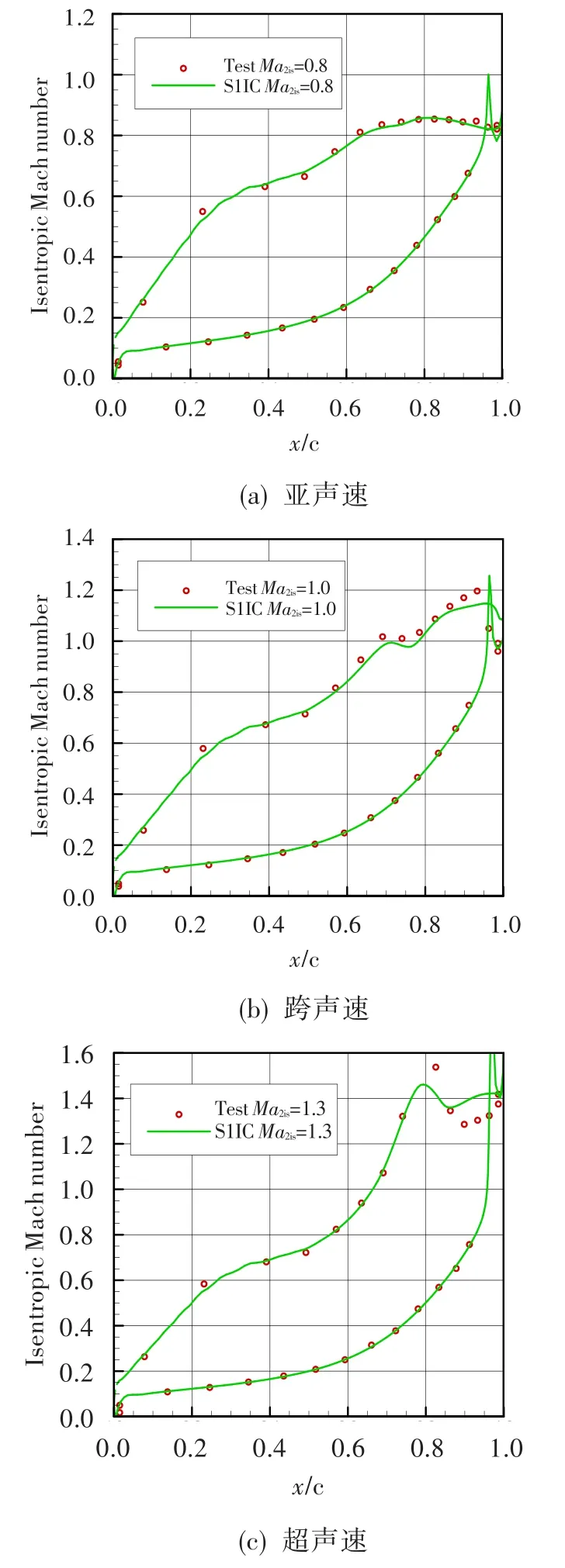
圖3 不同工況葉面表面馬赫數(shù)分布對(duì)比Fig.3 The comparison of the isentropic Mach number atdifferent operating conditions
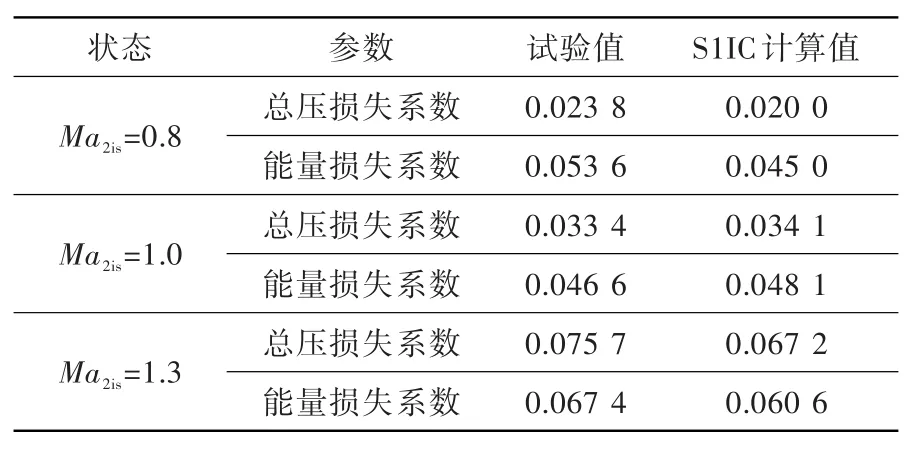
表1 性能參數(shù)對(duì)比Table 1 The comparison of performance parameters
圖4 平面葉柵優(yōu)化設(shè)計(jì)流程Fig.4 The flow chart of cascade optimization design
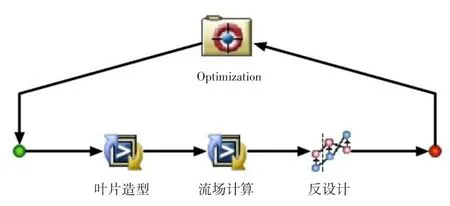
圖5 平面葉柵優(yōu)化設(shè)計(jì)平臺(tái)Fig.5 The platform of cascade optimization design
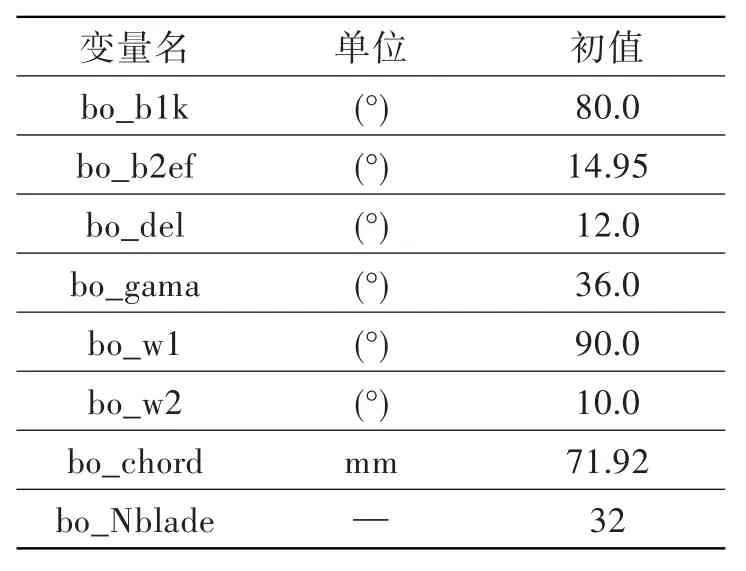
表2 葉柵主要參數(shù)Table 2 The dominating parameters of cascade
4.1 參數(shù)敏感性分析
平面葉柵優(yōu)化設(shè)計(jì)參數(shù)多(18個(gè)),故在優(yōu)化設(shè)計(jì)方案時(shí)需選適當(dāng)?shù)脑O(shè)計(jì)變量。如果對(duì)葉片幾何與流動(dòng)性能的關(guān)系分析不徹底,將導(dǎo)致優(yōu)化變量多、工作量大,難以實(shí)現(xiàn)有效的優(yōu)化設(shè)計(jì)。因此,需要開展參數(shù)敏感性分析,剔除敏感性相對(duì)較差的變量。首先,葉柵優(yōu)化會(huì)選擇適當(dāng)?shù)慕孛婧腿~片數(shù),而尾緣調(diào)節(jié)系數(shù)用于保證葉背兩條型線連接時(shí)曲率連續(xù),因此不做優(yōu)化考慮。應(yīng)用優(yōu)化平臺(tái)先對(duì)剩余葉柵參數(shù)進(jìn)行試驗(yàn)設(shè)計(jì),獲得各設(shè)計(jì)參數(shù)對(duì)葉柵性能的貢獻(xiàn)率。
圖6示出了葉柵各設(shè)計(jì)參數(shù)的貢獻(xiàn)率。可見(jiàn),尾緣直徑和有效出氣角對(duì)損失的貢獻(xiàn)率最高,6個(gè)型線控制參數(shù)對(duì)損失的影響也較大,接下來(lái)是尾緣折轉(zhuǎn)角、尾緣楔角和安裝角。尾緣直徑直接影響尾緣損失,有效出氣角則關(guān)乎葉柵喉部尺寸,所以損失對(duì)它們的敏感性很高;尾緣折轉(zhuǎn)角控制葉柵通道喉部位置之后的吸力面葉型曲率,從而影響葉片尾緣位置通道收斂性,特別是對(duì)高出口馬赫數(shù)葉柵的尾緣激波強(qiáng)度有很大影響;尾緣楔角影響著速度場(chǎng)的不均勻度及葉柵出口總壓差,對(duì)性能影響較明顯;安裝角受進(jìn)出口氣流角和稠度影響,存在最佳值,對(duì)葉片負(fù)荷有重要影響。考慮到尾緣直徑受加工工藝及冷卻要求的限制,而有效出氣角用于匹配調(diào)節(jié),所以不把這兩個(gè)參數(shù)作為優(yōu)化變量。因此,本文以控制點(diǎn)參數(shù)(bo_sl1、bo_sl2、bo_st1、bo_st2、bo_p1、bo_p2),尾緣折轉(zhuǎn)角(bo_del),安裝角(bo_gama),后楔角(bo_w2)等9個(gè)變量作為設(shè)計(jì)變量。
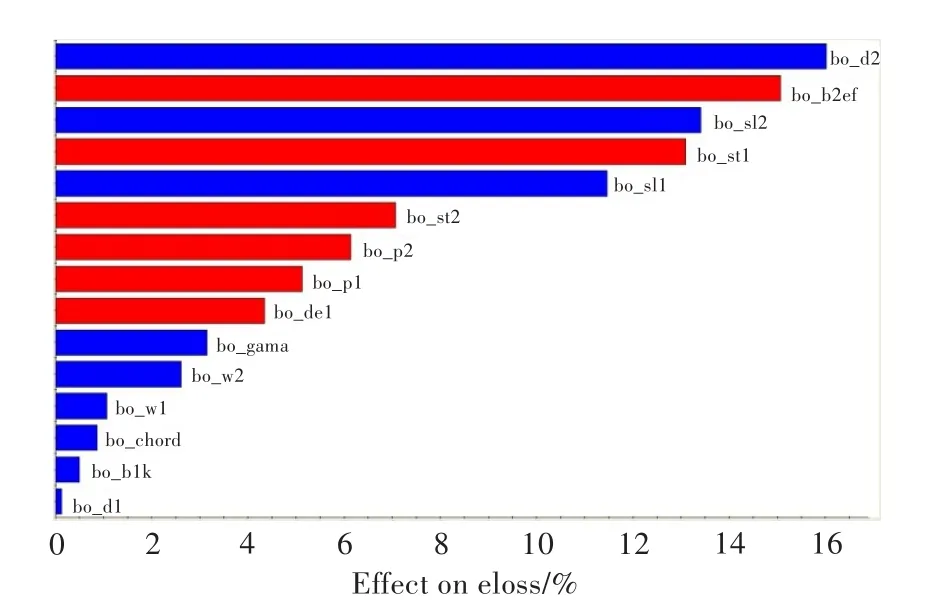
圖6 葉柵各設(shè)計(jì)參數(shù)貢獻(xiàn)率Fig.6 The contribution of cascade parameters
4.2 優(yōu)化算法分析
渦輪平面葉柵氣動(dòng)優(yōu)化設(shè)計(jì)是典型的非線性、多峰值優(yōu)化設(shè)計(jì)問(wèn)題,因此,優(yōu)化算法必須具有優(yōu)秀的魯棒性和搜索效率。iSIGHT平臺(tái)的優(yōu)化算法,包括數(shù)值型優(yōu)化算法、探索型優(yōu)化算法、專家系統(tǒng)技術(shù)三類,但是數(shù)值型優(yōu)化算法一般都假定參數(shù)空間是單峰的、凸的和連續(xù)的,因此僅考慮其他兩種典型算法。
選取多島遺傳算法(MIGA)、自適應(yīng)模擬退火算法(ASA)及優(yōu)化專家(Pointer)算法進(jìn)行測(cè)試對(duì)比,為渦輪平面葉柵優(yōu)化算法的選取提供依據(jù),圖7為各優(yōu)化算法的收斂史。可見(jiàn):只要時(shí)間足夠,三種算法都能找到全局最優(yōu)解。由于MIGA算法在每次探索時(shí)檢查一組設(shè)計(jì)點(diǎn)(由子群、島數(shù)和代數(shù)決定),故需要很大的計(jì)算量才能找到最優(yōu)解;Pointer算法對(duì)初始點(diǎn)的依賴較多,容易陷入局部最優(yōu)解;ASA算法在初始點(diǎn)附近就有小幅波動(dòng),即目標(biāo)函數(shù)值上升的點(diǎn)也可能被接受,從而避免陷入局部最優(yōu)點(diǎn),且收斂速度較其他兩種算法快。綜合考慮三種優(yōu)化算法的優(yōu)劣,優(yōu)化設(shè)計(jì)采用ASA算法。
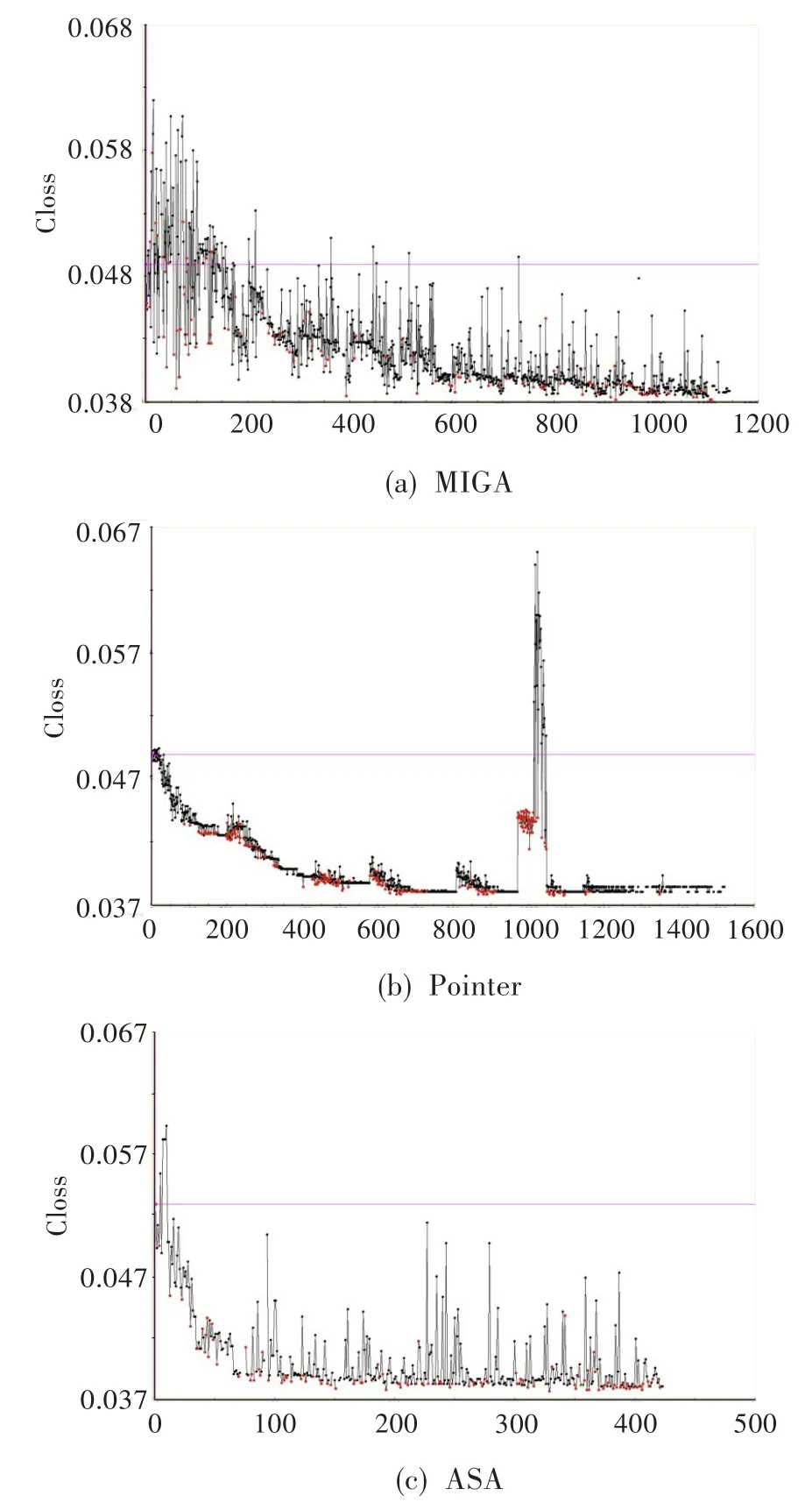
圖7 各優(yōu)化算法的收斂史Fig.7 The convergence history of the various methods
4.3 反設(shè)計(jì)方法
葉柵反設(shè)計(jì),即通過(guò)壓力或馬赫數(shù)分布,反推葉柵參數(shù)。通過(guò)對(duì)原始葉柵的流動(dòng)分析,可得到一個(gè)可能的理想馬赫數(shù)分布曲線,這樣就可對(duì)每次迭代運(yùn)算后的葉柵馬赫數(shù)分布加以約束,使其接近理想曲線分布。具體方法為,只考慮吸力面馬赫數(shù)分布,如圖8所示,給定理想馬赫數(shù)分布曲線(Target)與計(jì)算所得馬赫數(shù)分布曲線(Calculation),同一相對(duì)弦長(zhǎng)位置上馬赫數(shù)值差的平方和作為一個(gè)優(yōu)化目標(biāo),那么當(dāng)該值趨于最小時(shí),葉柵馬赫數(shù)分布最接近目標(biāo)曲線分布。
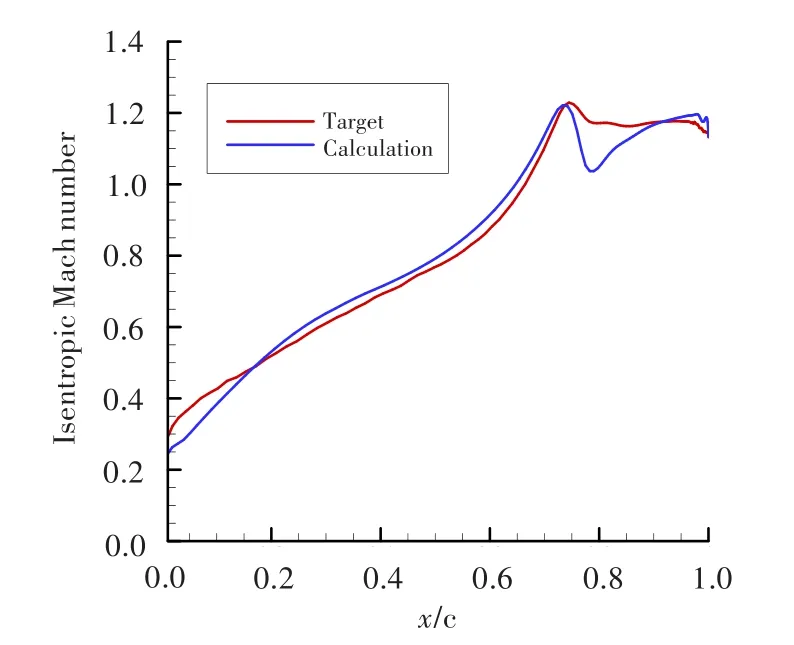
圖8 馬赫數(shù)分布曲線優(yōu)化示意圖Fig.8 The schematic diagram of the isentropic Mach number optimization
4.4 多目標(biāo)優(yōu)化方法
將能量損失和馬赫數(shù)分布曲線約束作為優(yōu)化目標(biāo),并采取權(quán)重法進(jìn)行處理,即把多個(gè)目標(biāo)轉(zhuǎn)化成單一目標(biāo)進(jìn)行優(yōu)化。
4.5 優(yōu)化結(jié)果分析
采用上述方法對(duì)該葉柵進(jìn)行優(yōu)化設(shè)計(jì),設(shè)計(jì)變量設(shè)置詳見(jiàn)表3,給定進(jìn)口氣流角(10°)和壓比(0.48),對(duì)葉型面積進(jìn)行約束(600 mm2<area<800 mm2),給定優(yōu)化目標(biāo)最小,權(quán)重系數(shù)都設(shè)置為0.5。
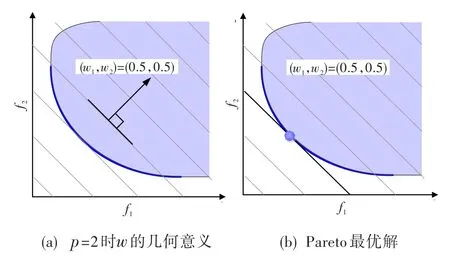
圖9 兩個(gè)優(yōu)化目標(biāo)時(shí)權(quán)重的幾何意義和Pareto最優(yōu)解Fig.9 The geometric significance ofwand the Pareto optimal solution
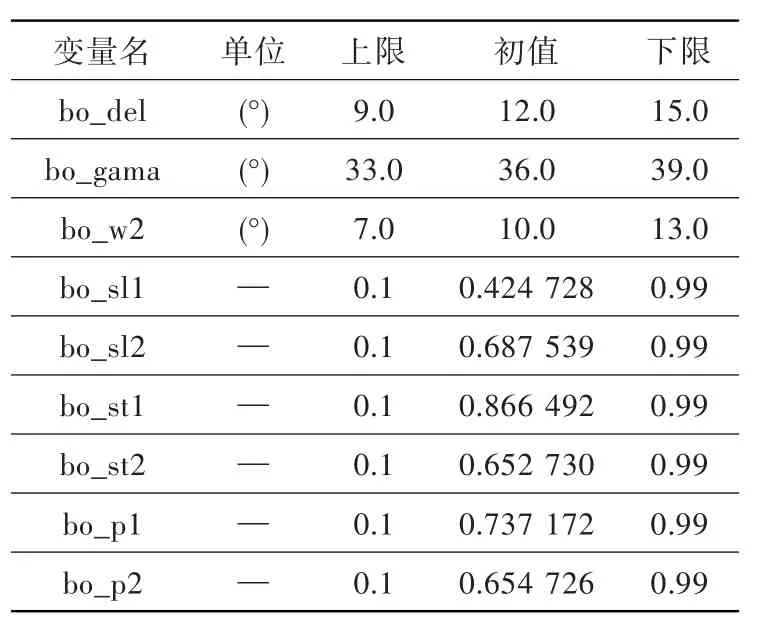
表3 參數(shù)設(shè)置Table 3 The parameters setting
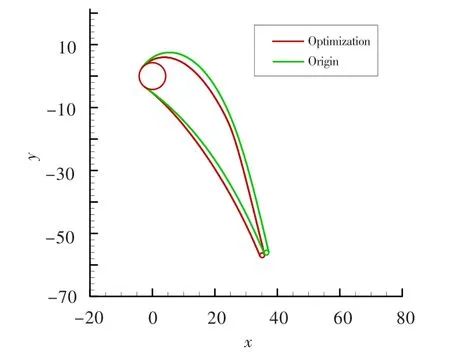
圖10 優(yōu)化前后葉型對(duì)比Fig.10 The comparison of cascade before and after optimization
優(yōu)化前后葉型對(duì)比見(jiàn)圖10,葉柵表面等熵馬赫數(shù)對(duì)比見(jiàn)圖11。從圖11中可看出,優(yōu)化后的葉柵很大程度上降低了尾緣處的逆壓梯度,吸力面葉柵馬赫數(shù)從峰值很平穩(wěn)地過(guò)渡到出口狀態(tài),大大改善了葉柵性能,且使吸力面壓力分布的變化更為平緩。優(yōu)化前后性能參數(shù)對(duì)比見(jiàn)表4,可見(jiàn)優(yōu)化前后出口馬赫數(shù)及出口氣流角并未有太大變化,但葉柵性能大大改善,能量損失與壓力損失相對(duì)于初始值有16%左右的降幅。
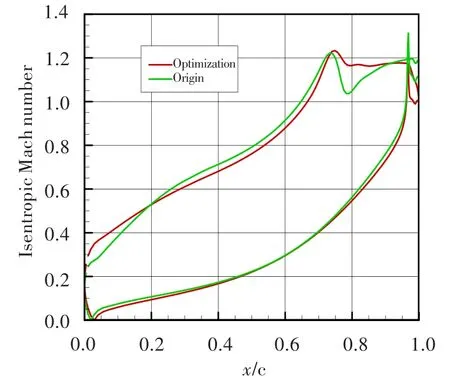
圖11 優(yōu)化前后表面等熵馬赫數(shù)對(duì)比Fig.11 The comparison of the isentropic Mach number before and after optimization
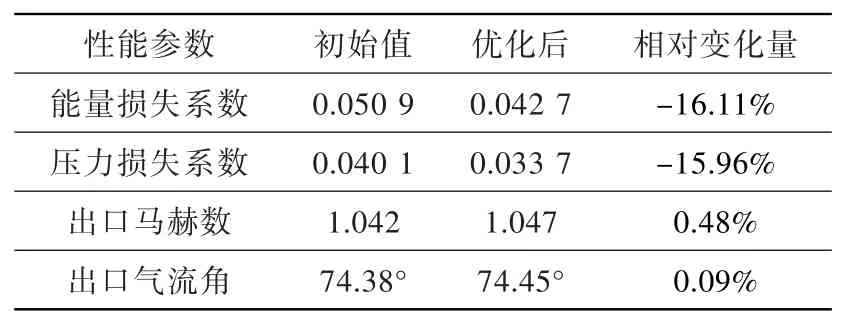
表4 優(yōu)化前后性能參數(shù)對(duì)比Table 4 The comparison of performance parameters before and after optimization
5 結(jié)論
本文闡述的渦輪平面葉柵優(yōu)化方法基于iSIGHT平臺(tái),采用一定的優(yōu)化策略,將成熟的渦輪葉柵造型軟件和葉柵性能評(píng)估軟件集成,形成渦輪平面葉柵優(yōu)化系統(tǒng)。優(yōu)化之初,首先開展參數(shù)敏感性分析,明確對(duì)葉柵優(yōu)化較為重要的參數(shù),剔除貢獻(xiàn)率小的參數(shù),以提高優(yōu)化效率。對(duì)優(yōu)化算法的考核表明,自適應(yīng)模擬退火方法較為適用于渦輪葉柵優(yōu)化。優(yōu)化目標(biāo)將葉柵設(shè)計(jì)的正、反問(wèn)題有機(jī)結(jié)合,使得渦輪葉柵的優(yōu)化工作更加靈活。實(shí)踐證明,該方法可快速有效地對(duì)渦輪葉柵流場(chǎng)和性能進(jìn)行優(yōu)化,較為適合工程應(yīng)用。
[1]Janus J M,Newman IIIJ C.Aerodynamic and thermal de?sign optimization for turbine airfoils[R].AIAA 2000-0840,2000.
[2]Jha R.Development of multidisciplinary optimization pro?cedure for smart composite wings and turbomachinery blades[D].Arizona:Arizona State University,1999.
[3]尚仁超,喬渭陽(yáng).基于參數(shù)法和貝塞爾曲線的渦輪葉片造型及其優(yōu)化[J].機(jī)械設(shè)計(jì)與制造,2007,(8):16—18.
[4]Li Ying-chen,Yang Dian-liang,F(xiàn)eng Zhen-ping.Inverse problem in aerodynamic shape design of turbomachinery blades[R].ASME GT2006-91135,2006.
[5]Li Ying-chen,F(xiàn)eng Zhen-ping.Aerodynamic design of turbine blades by using adjoint-based method and N-S equation[R].ASME GT2007-27734,2007.
[6]李劍白,卿雄杰,周山,等.渦輪葉片氣動(dòng)設(shè)計(jì)軟件BladeDesign[J].燃?xì)鉁u輪試驗(yàn)與研究,2011,24(3):12—13.
[7]卿雄杰.渦輪全三維計(jì)算軟件深度開發(fā)[C]//.中國(guó)航空學(xué)會(huì)第十七屆學(xué)術(shù)交流會(huì)議論文集.2013.
Turbine cascade multi-objective optimization design based on the parameter susceptibilities
LAI Wei,LI Jian-bai,ZHANG Jian
(China Gas Turbine Establishment,Chengdu 610500,China)
Based on the existing research results,a new turbine cascade optimization method was devel?oped,which was synthesized with the three key points:the cascade geometry design,performance assess?ment and optimization method.The integration of the optimization process was achieved in the iSIGHT plat?form.A multi-objective optimization design system of turbine cascade was established,which was suitable for the engineering application.Taking the middle section of a high pressure turbine cascade as an example, the further analysis was made in three ways:the parameter susceptibilities the inverse design of cascade and multi-objective optimization.The results indicate that the new method is able to optimize the flow field and performance of cascade quickly and efficiently.
turbine cascade;parameter susceptibilities;inverse design;multi-objective optimization;optimization method;engineering application
V231.3
A
1672-2620(2015)01-0054-06
2014-06-23;
2015-02-05
賴巍(1981-),男,滿族,河北廊坊人,工程師,碩士,主要從事渦輪氣動(dòng)設(shè)計(jì)和試驗(yàn)研究。
猜你喜歡
房地產(chǎn)導(dǎo)刊(2022年5期)2022-06-01 06:20:14
建材發(fā)展導(dǎo)向(2021年12期)2021-07-22 08:06:48
建材發(fā)展導(dǎo)向(2021年7期)2021-07-16 07:07:52
中學(xué)生數(shù)理化(高中版.高二數(shù)學(xué))(2021年12期)2021-04-26 07:43:48
藝術(shù)啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
Coco薇(2016年2期)2016-03-22 02:42:52
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長(zhǎng)指南(2015年4期)2015-05-19 14:47:56
