重載列車動能闖坡計算方法及應用
2015-01-13 01:50:00王開云
西南交通大學學報 2015年5期
王開云, 黃 超
(西南交通大學牽引動力國家重點實驗室,四川 成都610031)
牽引定數是牽引區段內的牽引質量標準.統一區段內的牽引定數可以減少貨物列車在區段站、編組站的作業,從而提高鐵路運輸能力并加速機車和車輛的周轉,具有顯著的經濟效益[1-2].隨著我國重載鐵路運輸的發展,各主要貨運干線的牽引定數不斷增大,由于干線與支線的線路平縱斷面存在較大差異,牽引定數增加之后,在干線上可正常運行的貨物列車行駛到支線上時可能面臨動能闖坡問題.所謂動能闖坡,是指利用機車牽引力和坡前儲存的動能,使列車以不低于機車計算速度闖過坡頂.
對于列車的操縱問題,主要研究方向有兩個:一是列車的節能操縱研究[3-5];二是組合列車的制動操縱研究[6-7].目前,對于列車闖坡操縱的研究較少,僅在坡停事故的分析中有所提及,如文獻[8-9]提出在不超速情況下,盡可能提高坡底速度,采用“闖爬結合”的方式通過困難坡道. 由于這些操縱建議并未考慮具體的線路平縱斷面條件及列車編組特性,研究結論是定性的,具有一定的局限性.
本文基于列車縱向動力學理論,考慮列車縱向運動的所有因素[10-11],提出了一種計算列車最低闖坡速度的方法,并結合某重載鐵路工程實際,開展了長大重載列車在實際坡道上的操縱分析,研究結果可為司機闖坡前的搶速操縱提供參考.
1 動能闖坡的多質點模型
1.1 列車的多質點模型
在研究列車動能闖坡問題時,忽略機車車輛橫向力和垂向力的影響,將每節機車車輛簡化為一個只有縱向自由度的質點,整列車(由n 節機車車輛編組而成)抽象為一個多質點的彈簧阻尼系統.每節車輛上的受力情況如圖1 所示.
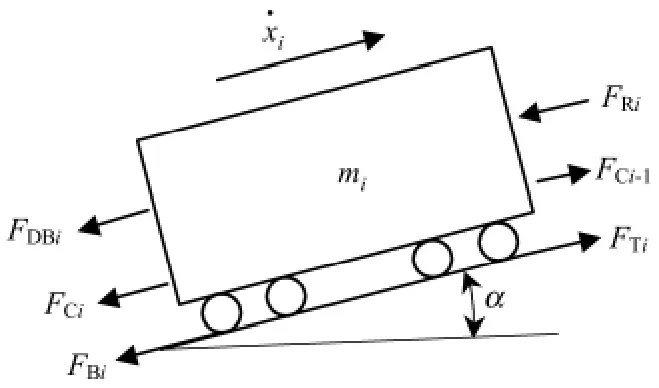
圖1 第i 節車的受力示意Fig.1 Schematic force diagram of vehicle i
圖1 中,α 為第i 節車所處線路斷面的坡度,其縱向動力學微分方程為

式中:i=1 ~n;
mi為第i 節車的質量;
FCi-1為第i 節車的前車鉤力,當i = 0 時,FCi-1=0;
FCi為第i 節車的后車鉤力,當i=n 時,FCi=0;
FRi為第i 節車的運行阻力,包括基本運行阻力、坡道阻力、曲線阻力、起動阻力等;
FTi為機車牽引力,僅作用于機車;
FDBi為機車的動力制動力,僅作用于機車;
FBi為第i 車的空氣制動力.
對于由n 節機車車輛編組而成的列車,可列出n 個運動微分方程,組成二階微分方程組. 本文采用新型顯式積分方法對此方程組進行數值積分[12]求解.
1.2 坡道簡化分類方法
在牽引區段內,使牽引重量受到限制的困難坡道稱為限制坡道,其余的坡道則為非限制坡道. 根據限制坡道所處的位置和長度不同,可將其分為計算坡道和動能坡道[13],如表1 所示.
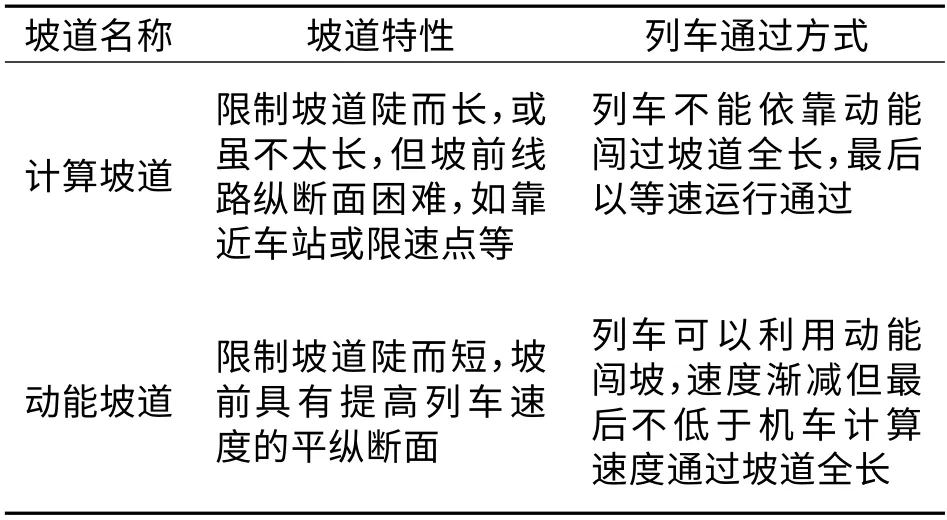
表1 限制坡道的分類Tab.1 Classification of limited slope
由表1 可知,限制坡道的分類需要根據具體線路縱斷面的情況,結合理論和實踐的經驗來判斷,需綜合考慮的因素比較多,不適合快速化和流程化地分類.
對于已經給定的列車編組,按照列車在計算坡道上以機車計算速度等速運行時,列車受到的總阻力和機車計算牽引力(乘以牽引力使用系數)相等的原則,可得到,即

式中:G 為牽引質量,t;
P 為機車質量,t;
Fj為機車計算牽引力,kN;
λy為機車牽引力使用系數,取為0.9[14];
ω0L、ω0V分別為計算速度下機車、車輛單位基本阻力,N/kN;
ix為計算坡度;
g 為重力加速度.
由式(2)可得到給定編組列車的計算坡度為

對于已經給定的列車編組及線路平縱斷面,首先按式(3)推導出其計算坡度ix,然后將ix與線路中的坡道坡度α 相比較. 簡化的坡道分類方法如表2 所示.
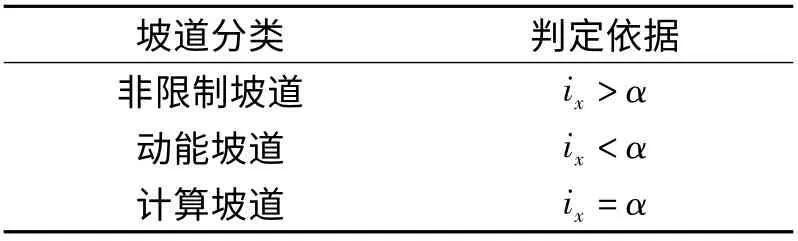
表2 簡化的坡道分類方法Tab.2 Simplified classification of the slopes
2 最低速度計算法及其計算流程
在整個動能闖坡過程中,機車以最大牽引力運行,按列車所受到的阻力與機車牽引力的大小不同,可將動能闖坡分為3 個工況.
在列車從平道駛入動能坡道的過程中,列車所受到的阻力逐漸增大,當阻力與機車牽引力相等時,列車的速度達到最高,此時列車的位置如圖2(a)所示,將此過程稱為第1 工況.
在列車駛出動能坡道的過程中,列車所受到的阻力逐漸減小,當阻力與機車牽引力相等時,列車的速度達到最低,此時列車的位置如圖2(b)所示,將此過程稱為第3 工況.列車從最高速度位置駛向最低速度位置時,其受到的阻力先增大后減小,列車的速度逐漸降低,將此過程稱為第2 工況.
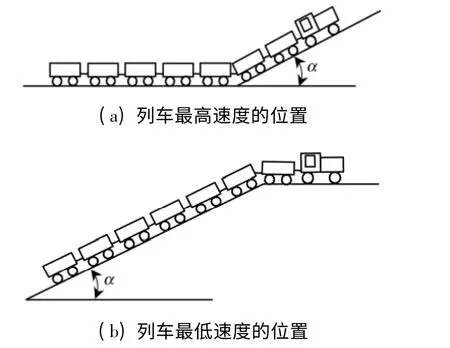
圖2 列車闖坡示意Fig.2 Sketch of train rushing through a slope
當采用單質點模型分析動能闖坡問題時,列車最低速度恰好出現在坡頂位置[13],當采用多質點模型研究動能闖坡問題時,不妨以首位機車速度及其所處位置作為整列車的速度和位置,則列車最低速度出現在坡頂之后. 為便于敘述,仍將其稱為坡頂速度,并作為列車闖坡性能的評判指標[10].
假定計劃開行的列車編組分別以初速vb1、vb2、vb3從動能坡道前的指定地點出發,計算得到其對應的坡頂最低速度分別為vt1、vt2、vt3,在坡頂速度-初始速度坐標系中,由A(vb1,vt1)、B(vb2,vt2)、C(vb3,vt3)3 個點擬合出一條樣條曲線,如圖3 所示.根據機車計算速度vj在擬合的樣條曲線上通過插值得到對應的最低速度vbmin,即為列車從指定地點開始動能闖坡的最低速度. 需要說明,由于1.2 節中提出的限制坡道簡化分類方法并沒有考慮坡道前的縱斷面情況,因此在計算出α 各動能坡道闖坡所需的最低速度vbmin后,還需檢驗相應坡道前的闖坡條件. 若坡前有限速點且限速vx≥vbmin,則列車可以利用動能通過此坡道;若限速vx<vbmin,則列車不能采用動能闖坡的方式通過此坡道,可以采用增加補機等其他措施后再進行列車動能闖坡校驗.具體的計算流程如圖4 所示.
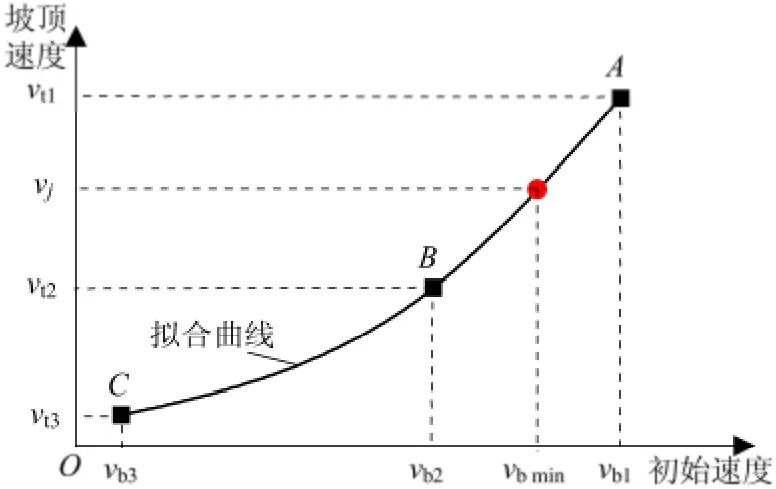
圖3 最低速度計算法示意圖Fig.3 Schematic calculation ofthe minimum speed
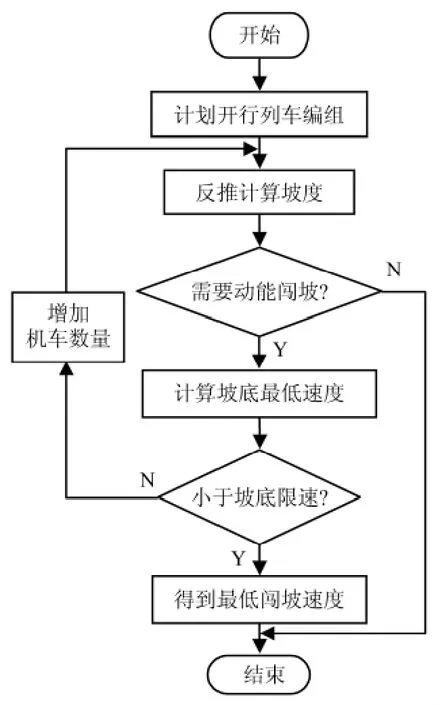
圖4 最低速度計算法流程圖Fig.4 Flow chart of calculation of the minimum speed
3 工程應用研究
3.1 工程背景簡介
為緩解我國能源運輸的緊張局面,某運煤專線計劃增開萬噸重載列車.此貨運干線為我國西煤東運的通道之一,重車方向最大上坡道坡度為4.0‰,支線為某火電廠的運煤線路,重車方向的最大上坡道坡度為9.0‰.計劃增開的列車編組形式為2 臺SS4 機車重聯牽引108 輛KM70 貨車,列車的主要參數如表3 所示.

表3 列車的主要參數Tab.3 Main parameters of the train
SS4 型電力機車的牽引特性曲線如圖5 所示,其中,0 ~50 km/h 速度段受機車粘著力限制,粘著系數按式(4)計算.
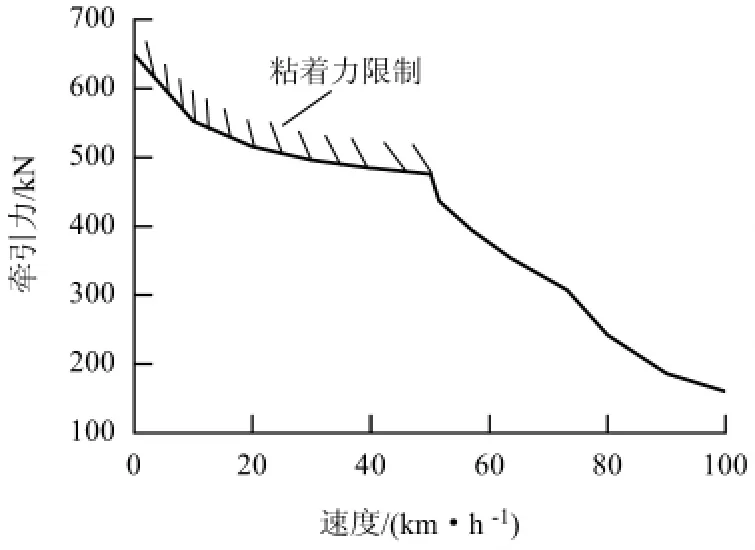
圖5 SS4 型電力機車牽引特性曲線Fig.5 Tractive characteristic curve of SS4 locomotive

式中:v 為機車速度.
由式(3)計算可知,給定編組列車的計算坡度為6.1‰,小于貨運支線的最大坡道,因此,計劃增開的萬噸列車在貨運支線上運行需進行動能闖坡的計算校驗.
3.2 最低速度計算法的計算
圖6 給出了此貨運支線的路肩高程圖.從圖6可以看出,在K15 ~K20 范圍內存在一個大坡道區段,具體的平縱斷面如圖7 所示,圖7 中:R 為線路平面曲線半徑,m;L 為線路曲線長度,m.
從圖7 中可以看出,在此區段內存在多個動能坡道,由于它們彼此相鄰或相距較近,因此,將此區段視為一個動能坡道,可作為最低速度法計算應用的工況.
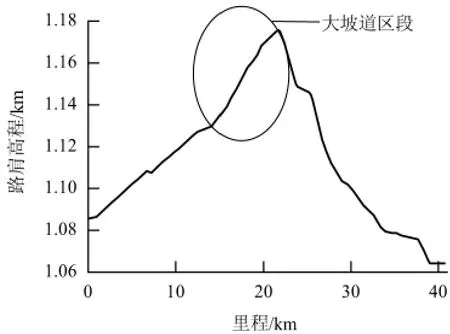
圖6 路肩高程圖Fig.6 Elevation map of road shoulder
假設列車首位機車位于K14 +100 處時開始動能闖坡,此時列車的初始速度分別為60. 00、70.00、80.00 km/h.兩臺機車的牽引手柄從零檔位提升至最高檔位用時32 s,之后一直保持最高牽引檔位運行直至通過此區段.

圖7 大坡道區段平縱斷面示意Fig.7 Schematic of plane and vertical sections of long steep slope
圖8 給出了3 種不同初速的列車從K14 +100處運行時,其運行速度隨線路里程的變化.從圖8 可以看出,3 種列車在通過此區段過程中的最低速度分別為48.14、50.73、53.93 km/h.
如圖9 所示,在坡頂速度-初始速度坐標系中,由D(60,48.14)、E(70,50.73)、F(80,53.93)3 點進行樣條曲線擬合,并在擬合的曲線上查找SS4 機車的計算速度(vj=51.50 km/h)所對應的初始速度.通過插值可以得到點G(72.8,51.5). 由此可知,給定編組的列車在K14 +100 處利用動能通過大坡道區段的最低闖坡速度為72.80 km/h.
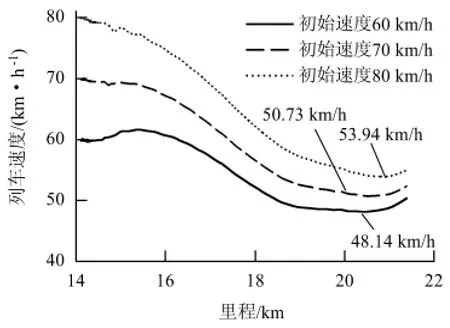
圖8 不同初始速度條件下列車速度與里程的關系Fig.8 Train speed versus mileage for different initial speeds
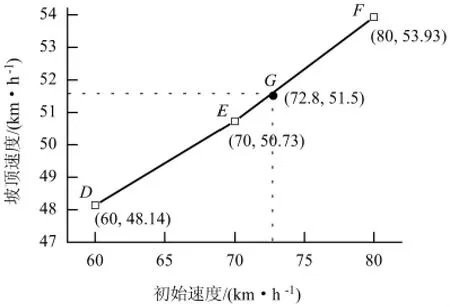
圖9 坡頂速度與初始速度的關系Fig.9 Train speed on top of slope versus initial speed
3.3 最低速度法的驗證
假定此貨運支線在K14 +100 處沒有限速點,由3.2 節可知列車的最低闖坡速度為72.80 km/h.為驗證動能闖坡最低速度計算法的精確性,對計劃開行的萬噸編組列車在K14 +100 處以72.80 km/h的初速度實施動能闖坡進行了仿真計算,仿真結果如圖10 所示.
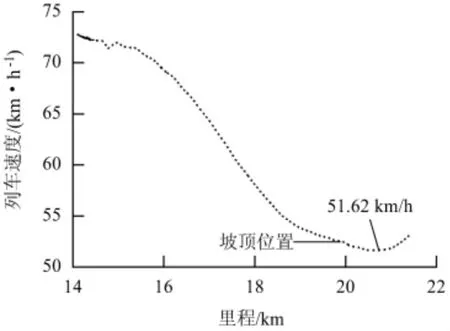
圖10 列車速度與里程的關系Fig.10 Train speed versus mileage
從圖10 可以看出,列車在通過此區段過程中的最低速度為51.62 km/h,與SS4 機車的計算速度51.50 km/h 相比僅差0.23%,因此,本文提出通過插值計算得到列車最低闖坡速度的方法具有較高的精度.
4 結束語
基于列車縱向動力學理論,考慮線路的平縱斷面因素,提出了一種計算列車動能闖坡最低速度的方法.結合工程實際,進行了擴編列車動能闖坡最低速度的計算研究,并對計算結果進行了計算驗證,結果表明,該方法具有較高的精度.列車闖坡操縱時,建議在動能坡道前及時提速,以使列車闖坡時的速度不低于計算出的動能闖坡最低速度.
[1] 夏波,楊浩. 實施長交路、提高牽引定數的經濟效益分析[J]. 鐵道運輸與經濟,2004,28(10):9-10,60.XIA Bo,YANG Hao. The economic profit analysis of long locomotives routing and high tonnage rating[J].Railway Transport and Economy,2004,28(10):9-10,60.
[2] 袁敏紅,張超. 統一牽引定數發展始發直達列車[J]. 中國鐵路,2007(7):55-57.YUAN Minhong,ZHANG Chao. Unify tonnage rating and develop nonstop train[J]. Chinese Railways,2007(7):55-57.
[3] LIU Rongfang,GOLOVITCHER I M. Energy-efficient operation of rail vehicles[J]. Transportation Research Part A:Policy and Practice,2003,37(10):917-932.
[4] 李波. 基于遺傳算法的列車節能操縱曲線尋優[D].成都:西南交通大學,2007.
[5] 唐海川,朱金陵,王青元,等. 一種可在線調整的列車正點運行節能操縱控制算法[J]. 中國鐵道科學,2013,34(4):89-94.TANG Haichuan,ZHU Jinling,WANG Qingyuan,et al. An on-line adjustable control algorithm for on-time and energy saving operation of trains[J]. China Railway Science,2013,34(4):89-94.
[6] 李蔚,陳特放,李輝,等. 重載組合列車分布動力機車重聯控制系統無線傳輸同步性研究[J]. 中國鐵道科學,2011,32(6):102-106.LI Wei,CHEN Tefang,LI Hui,et al. Research on the wireless transmission synchronization of the coupling control system for heavy haul combined train and distributed power locomotive[J]. China Railway Science,2011,32(6):102-106.
[7] 趙鑫,王成國,馬大煒. 機車無線同步控制技術對2 萬t 重載組合列車縱向力的影響[J]. 中國鐵道科學,2008,29(3):78-83.ZHAO Xin,WANG Chenguo,MA Dawei. Influence of locomotive wireless sync control technology on the longitudinal force of 20 000 t heavy haul combined train[J]. China Railway Science,2008,29(3):78-83.
[8] 閆永平,吳宜誠. 重載列車途停原因分析及對策[J]. 鐵道機車車輛,2010,30(4):83-86.YAN Yongping,WU Yicheng. Analysis on heavy haul train in-section halt and its countermeasures[J].Railway Locomotive & Car,2010,30(4):83-86.
[9] 甘雄華,李彬,邵育華. HXD1C 型機車坡停原因分析及防止措施[J]. 電力機車與城軌車輛,2011,34(1):69-72.GAN Xionghua,LI Bin,SHAO Yuhua. Analysis on HXD1C locomotive in-section halt and its countermeasures[J]. Electric Locomotives & Mass Transit Vehicles,2011,34(1):69-72.
[10] 鐵道部科學研究院機車車輛研究所. TB/T 1407—1998 列車牽引計算規程[S]. 北京:中國鐵道出版社,1998.
[11] 嚴雋耄,翟婉明,陳青,等. 重載列車系統動力學[M]. 北京:中國鐵道出版社,2003:40-125.
[12] ZHAI Wanming. Two simple fast integration methods for large-scale dynamic problem in engineering[J].International Journal for Numerical Methods in Engineering,1996,39(24):4199-4214.
[13] 孫中央. 列車牽引計算實用教程[M]. 北京:中國鐵道出版社,2005:178-180.
[14] 王鳳臣,任良抒,丁菊霞. 電力機車牽引計算[M].成都:西南交通大學出版社,2010:179.