基于HART協議的智能多段式電容汽包液位計設計
2015-01-13 02:19:07田海軍
化工自動化及儀表 2015年9期
田海軍 張 鋆 王 健
(東北電力大學自動化工程學院,吉林 吉林132012)
汽包水位是自然循環鍋爐安全運行的重要參數之一。汽包水位過高或過低時,都會破壞鍋爐的水循環,嚴重時會造成爆管等重大事故,所以準確測量汽包水位具有重要意義。由于汽包結構復雜,運行工況變化大,目前還沒有全工況監測汽包水位的方法。現在電廠中多采用多種儀表、多點檢測的方法來測量汽包水位,主要使用差壓式水位計、云母水位計和電接點水位計,但它們都存在一些缺陷[1]。為解決這些問題,筆者設計了一種基于HART協議的智能多段式電容汽包液位計,通過精確測量各段傳感器的電容值,得到實時液位值,最終結果通過兩線制輸出4~20mA校準工業信號,實現了汽包液位的全工況測量,并且支持HART通信協議,可以方便地實現液位計的組態、監測和校準功能。
HART協議是一種現場總線協議[2],現場總線是目前國際過控領域的一個熱點,通過現場總線對現場儀表完成實時監控和校準。但是現在工廠中的儀表大部分還保留4~20mA的模擬信號,在模擬設備向數字設備過渡的現階段,HART協議作為一種開放性協議,可以同時兼容數字信號和模擬信號。
智能多段式電容液位計主要由七段式電容液位傳感器、高精度電容測量電路、STM32F103C8T6單片機、4~20mA電流輸出和HART通信單元構成。
七段式電容液位傳感器用來將液位信號轉換成各段傳感器對應的電容值,高精度電容測量電路實現各段電容值的同時、準確被測量,并將測量結果傳送給STM32單片機進行數據處理得到實時的液位值,然后經D/A轉換器AD421轉換成連續的4~20mA電流信號, HART通信單元用來實現4~20mA電流環路中FSK數字信號的發送和接收,通過HART手持器或者在控制室就可以方便地完成對液位計的組態、實時監測和校準功能。
2 硬件設計
2.1 七段式電容液位傳感器設計
七段式電容傳感器[3]結構如圖1所示,由外極筒和內極筒構成。不銹鋼外殼作為整體構成外極筒,為了使被測液體能夠順利進入兩極筒間,在靠近外極筒底端和頂端部分留有兩個進液孔。內極筒由7段相同的銅箔電極粘貼在電木上構成,外極筒和每段銅箔電極各引出一條導線與傳感器接線盒相連,8條導線就可以很方便地測量各段電容值,為了避免寄生電容并適應惡劣的應用環境,設計中采用耐高溫的屏蔽導線。由于水是良好的導體,為了使外極筒和內極筒絕緣,內極筒的銅箔電極外部套有耐高溫和耐腐蝕的聚四氟乙烯絕緣層,傳感器接線盒用來放置數字信號處理電路板,接線盒的一側采用航空插頭增加電路的抗干擾能力,為了使接線盒防水,傳感器接線盒頂部也設置有傳感器上蓋。
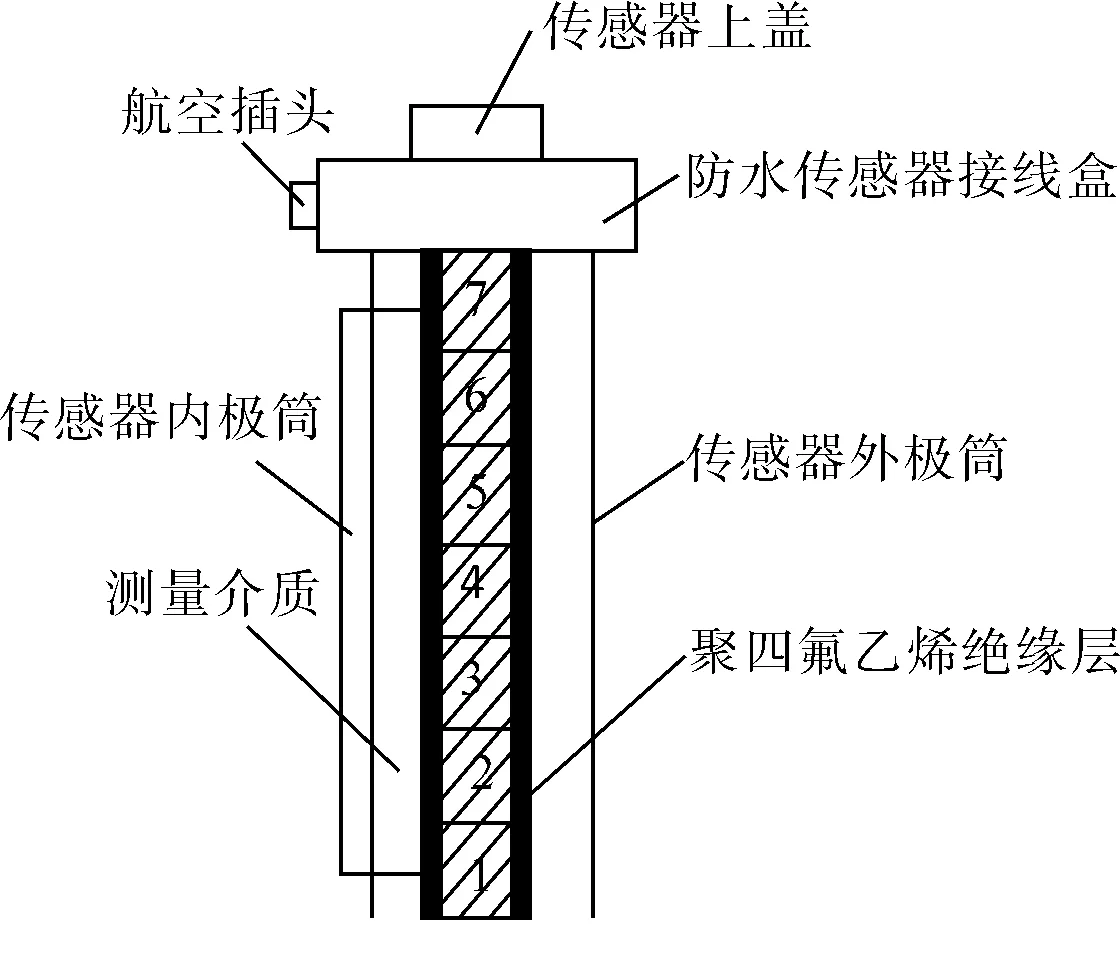
圖1 七段式電容傳感器結構
七段式電容傳感器相當于從上至下形成了7個1/7量程的電容傳感器,各段獨立檢測電容,從而得到整體的測量結果[4]。
多段式電容傳感器,不但具有耐高溫、耐腐蝕及成本低等優點,而且由于采用了多段式結構,相當于縮短了檢測量程,提高了檢測分辨率和精度,自帶量程基準(段長)、零點基準(空介質段)和滿值基準(滿介質段),為實現在線自標定校正功能提供了依據。
2.2 高精度電容測量電路設計
電容測量電路采用PCap01高精度電容測量芯片,測量電容精度可以達到af級,而且芯片帶有單片機處理單元來完成電容數字轉換。
PCap01芯片電容測量單元原理如圖2所示。芯片內部集成了RC充放電電路[5],為了提高測量精度,芯片輸出的最終結果不是被測電容值,而是被測電容與參考電容的比值。PC0引腳接47pF的參考電容,PC1~PC7引腳分別與各段傳感器的引線相連。PCap01芯片提供了可供選擇的4個不同阻值的充放電電阻(單位:kΩ),可以通過設置芯片的配置寄存器參數來選擇,選擇完成后,芯片內部會將被測電容和參考電容連接到這同一個充放電電阻。由于采用相同的充放電電阻和比值輸出,克服了溫度和壓力改變對電容測量值的影響。
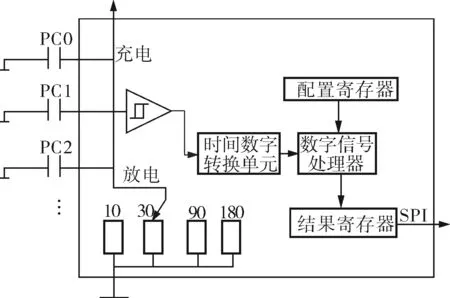
圖2 PCap01芯片電容測量單元原理
由于電容值的大小與放電時間成正比關系,PCap01芯片集成了高精度的時間數字轉換單元,可以精確記錄放電時間,精度可以達到2μs,然后經哈佛結構的數字信號處理器處理之后得到電容比值,完成電容數字轉換,精度可以達到0.477%,最后將電容比值存儲在結果寄存器中。為了使電容能夠完成完整的充放電過程,充放電周期參數的設置非常重要,需要將芯片配置寄存器的充放電周期參數設置的足夠大。
最后通過SPI通信接口技術將結果寄存器的測量結果傳送給STM32單片機,進行數據處理和擬合。由于采用電容單芯片測量方案,避免了搭建充放電電路和使用切換開關[6],提高了電路的穩定性和精度,實現了各段傳感器電容值的同時測量。
2.3 HART通信單元設計
HART協議是美國Rosemount公司開發的一種通信協議[7], HART通信單元由AD421芯片、STM32單片機和DS8500芯片構成,實現了HART協議的物理層設計[8]。AD421是一款用于工業控制領域的16位數模轉換芯片,用來將單片機傳輸的液位信號轉換為工業上標準的4~20mA電流信號。為了減少數字信號對模擬信號的干擾,將AD421的CLOCK、DATA、LATCH引腳通過ADuM1310磁耦芯片隔離之后,分別與STM32單片機的PC13~PC15引腳相連。AD421的C1~C3引腳外接電容用來濾波,為了得到精確的HART波形,C1~C3引腳的外接電容值分別置為0.01、0.50、0.16μF。
DS8500芯片是一款用于HART通信的單芯片調制解調器。DS8500及其外圍器件電路圖如圖3所示。DS8500芯片的RTS引腳與STM32單片機的PA12引腳連接,通過編程輸出高低電平來控制DS8500處于調制或解調模式,引腳 D_IN和D_OUT分別為數字輸入和輸出引腳,分別與STM32單片機的USART1引腳PA9(Tx)和PA10(Rx)對應連接。FSK_IN為HART信號的接收引腳,為了能夠從模擬信號中準確提取HART信號,R10和C34構成一個截止頻率為10kHz的低通濾波器,R13和C32構成一個截止頻率為480Hz的高通濾波器,FSK_IN引腳與24V電源正極相連。FSK_OUT為HART信號的發送引腳,為了使HART輸出信號穩定,使用MAX4040EUK增益放大器芯片將HART信號進一步放大,最后經過C39連接到AD421的C3引腳,通過AD421將HART信號疊加到4~20mA電流環路中。
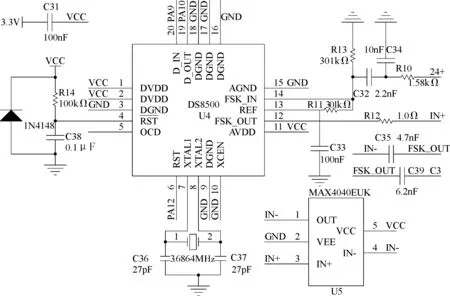
圖3 DS8500芯片及其外圍器件電路圖
3 軟件設計
軟件設計分為兩個部分,一部分是液位測量程序設計,另一部分是HART協議通信程序設計。
液位測量程序流程如圖4所示,首先對STM32單片機進行初始化,包括初始化IO接口、設置SPI通信參數及初始化USART1等。然后通過SPI通信方式向PCap01發送復位信號,初始化PCap01芯片,操作配置寄存器,使PC1~PC7引腳處于測量模式,充放電周期設置為280μs,選擇30kΩ的充放電電阻,操作完成后,開始電容測量,待測量完成之后,將測量結果傳送給STM32單片機,單片機將電容比值經過處理和擬合之后轉換為實時液位值,然后將液位值變為16位的數字量傳給AD421輸出4~20mA電流信號。
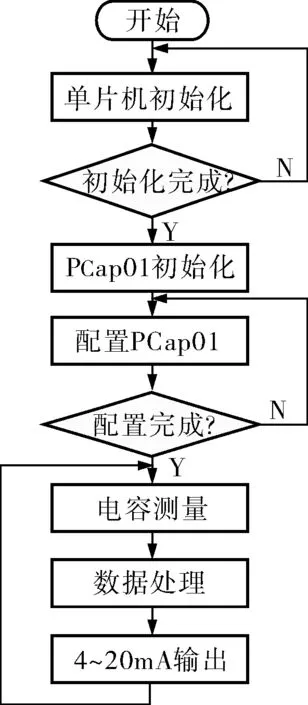
圖4 液位測量程序流程
HART協議通信程序流程如圖5所示,完成了HART協議數據鏈路層[9]、應用層[10]和層間接口的程序設計,實現了HART信號的接收、解析、響應和發送,并開發了用于各段校準的特殊命令。由于采用USART1完成數字字節的傳輸,所以單片機初始化時應包括通信速率、數據長度及工作模式等參數設置,并開啟USART1接收中斷,PA12引腳設置為高電平,使DS8500芯片處于接收HART信號狀態。當DS8500芯片接收到HART信號時,將其解調成0、1數字信號,然后通過USART1傳送給STM32單片機,STM32接收到數據后,進入串口接收中斷,接收命令幀數據。進而對接收到的數據進行縱向奇校驗,如果正確,則按照HART協議的通信幀格式,解析命令幀,根據命令幀相應的命令形成應答幀,然后將PA12引腳設置為低電平,使DS8500芯片處于發送HART信號狀態,STM32單片機通過USART1將應答幀傳送給DS8500芯片,經DS8500芯片調制成FSK信號之后加載到4~20mA環路中。當發送完成之后,再次進入接收狀態,等待下一條命令。
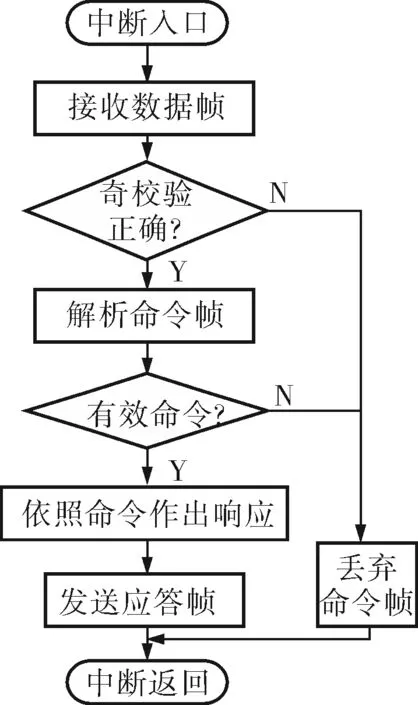
圖5 HART通信程序流程
4 實驗與結果分析
液位計各段長度為70mm,傳感器外壁貼有0.1mm精度的防水貼尺,用來標定真實液位值。將液位計放入透明測量筒中,為了消除液位計插入水中時對水位的影響,測量筒的直徑應足夠大,為了使實驗準確,采用向測量筒中滴加水的方式,每間隔2mm記錄液位計電流輸出值和液位真實值,并使用仿真器記錄PCap01芯片對應的電容測量值,由于各段大致相同,以第四段為例,繪制液位-電流曲線如圖6所示,可以看到線性良好,與理論吻合,由于電容傳感器存在制造誤差,液位測量值有較小的波動,誤差小于3mm,精度為0.5級,符合設計要求。
在4~20mA電流環路中,串入300Ω左右的通信電阻,將USB-HART調制解調器的兩個無極性測試鉤,勾在電阻兩端,通過上位機軟件和液位計通信,完成HART通信測試,結果表明HART通信單元實現了量程上下限調整,各段傳感器校準和對液位值、電容值等變量的實時監測等功能。
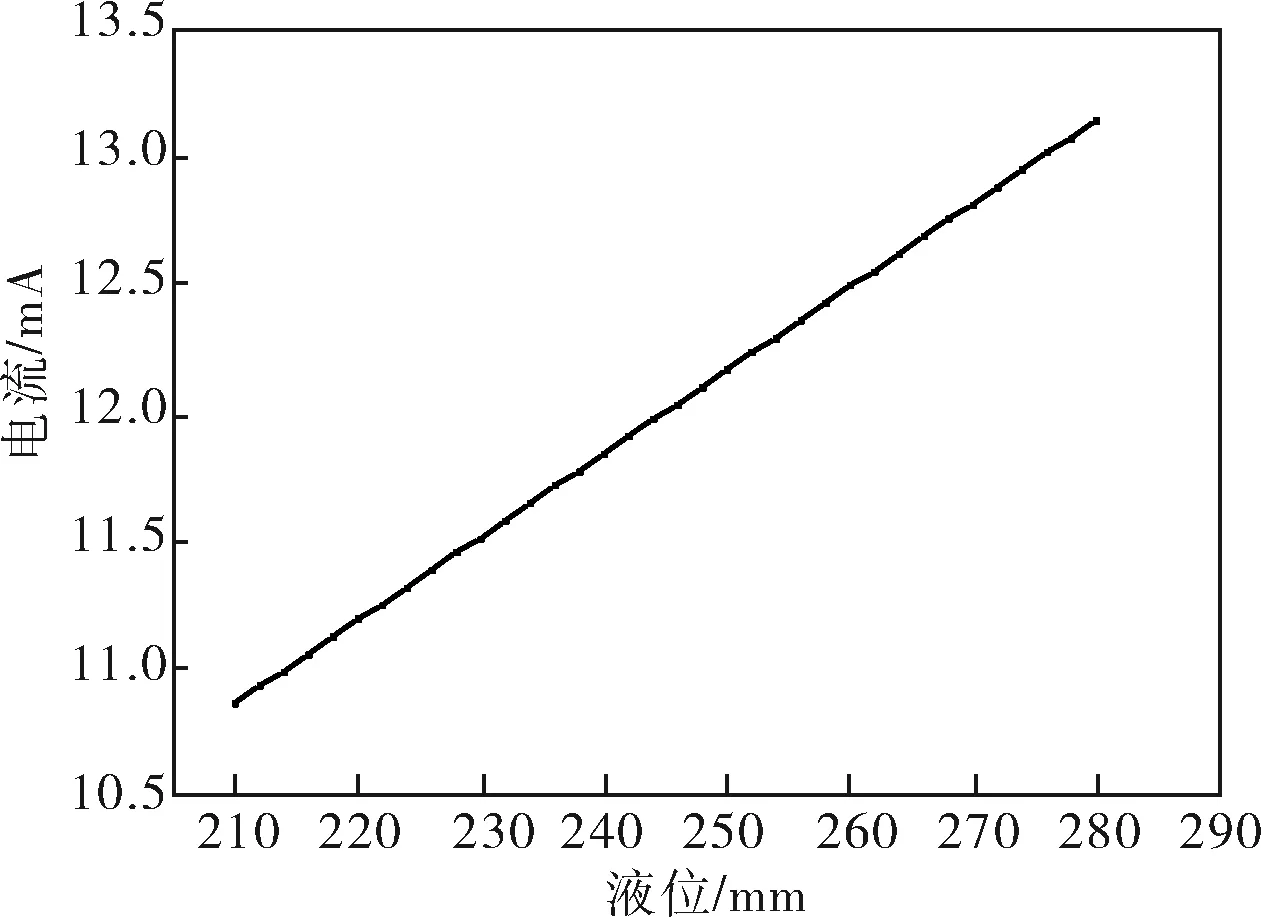
圖6 液位-電流曲線
5 結束語
筆者設計的智能多段式電容液位計克服了差壓式水位計等傳統水位計測量汽包水位存在的缺陷,并解決了溫度壓力補償問題,實現了汽包水位的全工況測量。精度可以達到0.5級,滿足工業現場要求。
[1] 程啟明,汪明媚,王映斐.火電廠鍋爐汽包水位測量技術發展與現狀[J].電站系統工程,2010,26(2):5~8.
[2] 楊新民,肖勇,陳豐.現場總線技術在火電廠的應用[J].熱力發電,2014,43(9):76~82.
[3] 張波.分段電容式液位測量的研究[D]. 大連:大連海事大學,2010.
[4] 朱高中.電容式傳感器在液位測量中的應用研究[J].液壓與氣動,2012,(2):70~72.
[5] 王剛,李桂林.基于電容充放電原理的納秒級時間精度測量技術[J].化工自動化及儀表,2010,37(8):69~71.
[6] 陳海俠,高宗海,申阿維.低功耗兩線制電容式液位變送器的研制[J].西安理工大學學報,2011,27(4): 471~476.
[7] 廖瑋.基于HART協議的智能定位閥控制系統的研制和開發[D]. 天津:天津大學,2009.
[8] 孔祥偉,周杏鵬. 基于HART協議的智能壓力變送器的設計與實現[J].儀表技術與傳感器,2010,(2):15~17.
[9] 姜祥真,陳俊杰,操永波.HART主機數據鏈路層的實現[J].自動化儀表,2010,31(6):1~4.
[10] 聶磊.基于HART協議的智能儀表通信系統設計[D].成都:電子科技大學,2008.
猜你喜歡
電子制作(2019年13期)2020-01-14 03:15:28
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
電子制作(2019年15期)2019-08-27 01:12:10
電子制作(2019年9期)2019-05-30 09:42:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
測控技術(2018年9期)2018-11-25 07:45:00
石油化工自動化(2018年5期)2018-11-14 02:34:30
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
汽車維護與修理(2015年2期)2015-02-28 12:15:41