石化裝置高壓電動機磁平衡差動保護的整定
2015-01-13 02:19:23施文豐黃躍進
化工自動化及儀表 2015年9期
施文豐 黃躍進
(中國五環工程有限公司,武漢 430223)
隨著各種石化工藝包的引進,國外進口的大型高壓電動機(如大型電動壓縮機組等)在石化裝置中被越來越多地使用。進口大型高壓電動機常配套磁平衡差動保護作為電動機的主保護,由于磁平衡差動保護(對比傳統縱聯差動保護)的優點[1],越來越多的國產電動機也開始使用磁平衡差動保護。但迄今為止,高壓電動機磁平衡差動保護的整定僅有繼電保護廠家提供的公式和較少的文獻參考,還沒有國家、行業標準或設計手冊對磁平衡差動保護及其整定進行明確表述[2]。
鑒于國內石化企業6kV和10kV系統中性點接地方式的多樣性,針對各種接地方式對高壓電動機磁平衡差動保護整定進行探討很有必要。
根據國家標準的相關規定,2MW及其以上或電流速斷保護靈敏系數不符合要求的2MW以下的電動機,應裝設縱聯差動保護,其工作原理如圖1所示[1],保護裝置應瞬時動作于跳閘[3]。
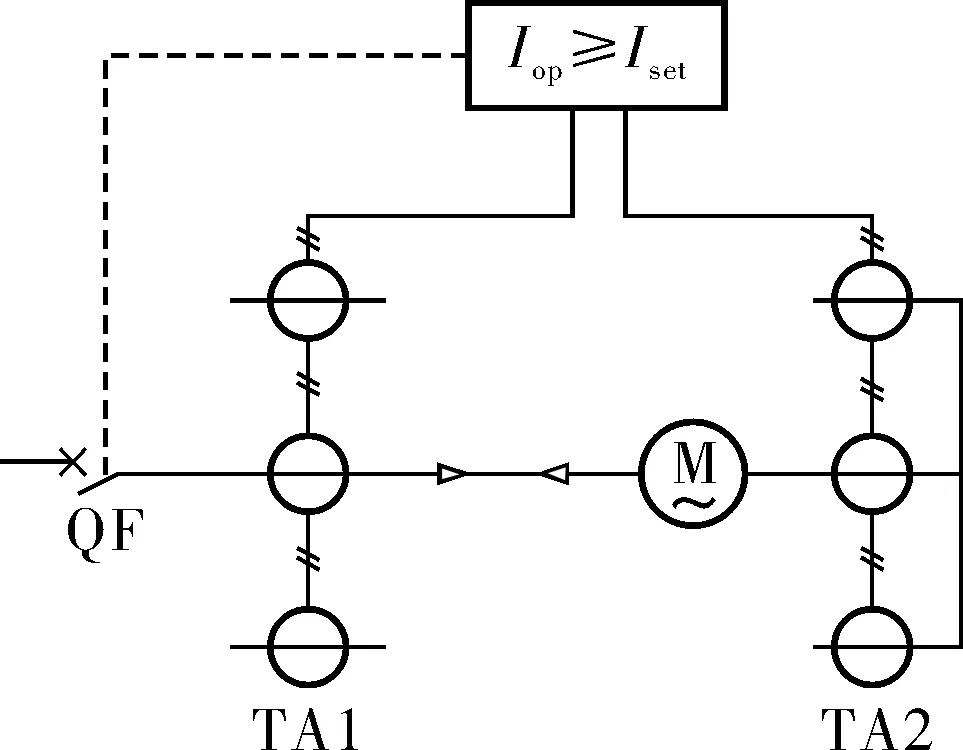
圖1 縱聯差動保護工作原理
通常電流互感器TA1裝設在高壓開關柜,TA2裝設在現場高壓電動機的專用接線盒,由于兩組互感器二次負載不一致,裝設在現場的TA2更易飽和,這就使得電動機在啟動或外部發生短路故障時(此時電動機的反饋電流按堵轉電流考慮),保護裝置測得的不平衡電流會較大,縱聯差動保護容易誤動作;當高壓電動機與高壓開關柜的距離越遠時,此類問題越容易發生。盡管有些保護廠家通過刻意提高電動機啟動時的保護定值來躲過電動機啟動時的不平衡電流,但也無法避免外部發生短路時的誤動作;且電動機啟動時,縱聯差動保護的靈敏系數也較低[4,5]。
磁平衡差動保護的工作原理如圖2所示[1]。通常,磁平衡差動電流互感器TA裝設在現場電動機接線箱內,使電動機定子繞組的始端和中性點端同時穿過TA。這樣,不管是在啟動還是在運行過程中,流入定子繞組始端與流出中性點端的電流始終相等,對TA而言,一次勵磁安匝數為零,二次側不產生感應電流,也就不會因電動機啟動或外部短路故障而使保護誤動作。而電動機內部短路時(除匝間短路外),由于流入定子繞組始端與流出中性點端的電流將不再相等,TA二次側將感應出電流,從而使保護可靠動作。另外,在正常運行時,TA二次側感應的不平衡電流非常小,TA的二次側開路一般不會產生過電壓。
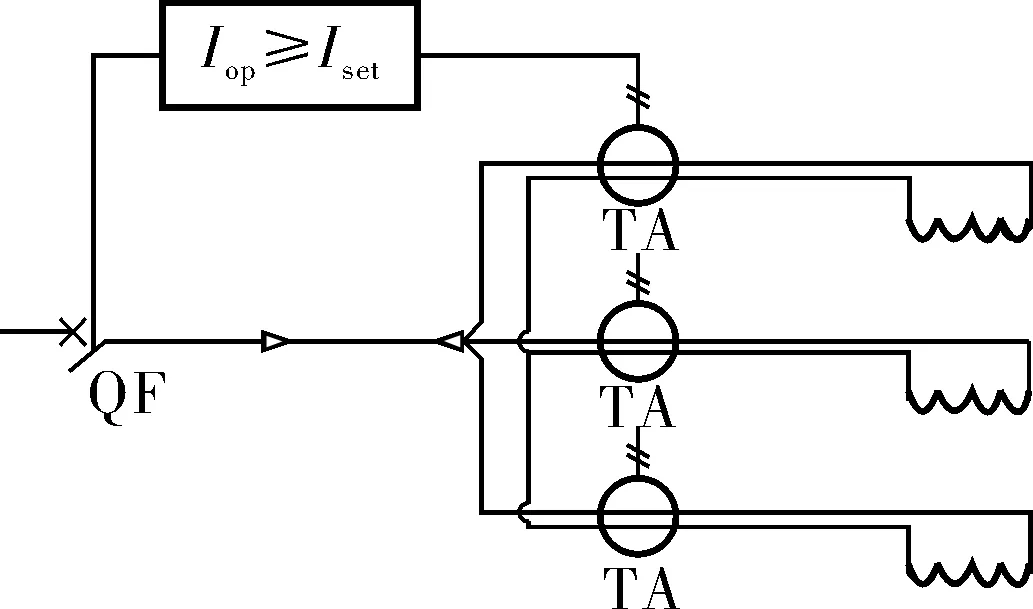
圖2 磁平衡差動保護示意圖
2 現有資料中磁平衡差動保護的整定
現有繼電保護廠家提供的公式或文獻中基本都按躲過外部單相接地短路時的不平衡電流[1]或躲過啟動(堵轉)時的不平衡電流[2]兩種方法對電動機磁平衡差動保護進行整定。
2.1 躲過外部單相接地短路時的不平衡電流
系統正常時,根據基爾霍夫定律,TA能檢測電動機繞組的對地電容電流。當電動機外部發生單相接地短路時,故障相電壓為零,故障相的TA將不再能檢測電動機繞組的對地電容電流;非故障相對地電壓升高為系統的線電壓(中性點不接地系統,此種接地方式非故障相對地電壓升高得最大),此時非故障相的TA能反映電動機繞組的對地電容電流,如圖3所示。

圖3 外部單相接地短路電容電流分布

=Kk·U·ω·Cp/nTA
(1)
式中Cp——電動機單相繞組對地電容值;
Kk——可靠系數;
nTA——TA變比;
U——系統線電壓;
Up——系統相電壓;
ω——角頻率。
2.2 躲過啟動(堵轉)時的不平衡電流
由于流入TA與流出TA的電流在TA中的空間位置的不對稱、電動機繞組的對地電容電流和TA本身磁路的不對稱,啟動和正常運行時,TA二次側總能檢測到一定大小的不平衡電流(Iimb)。正常運行時,通常情況下TA的實測Iimb的值不大于0.5%的運行電流。
因此,與傳統的縱聯差動保護一樣,磁平衡差動保護整定時也必須躲過電動機啟動(堵轉)時的不平衡電流,即:
Iset=Kk·Kp·Kq·In/nTA
(2)
式中Kp——電流不平衡系數,通常取0.5%;
Kq——電動機啟動倍數(堵轉電流倍數);
In——電動機額定電流。
Kk取1.5,Kp取0.5%,Kq取7,則有:
Iset=1.5×5%×7×In/nTA≈5%×In/nTA
(3)
通常,躲過啟動(堵轉)時的不平衡電流的Iset比躲過外部單相接地短路時的不平衡電流的Iset要大。即現有保護廠家或參考文獻推薦的磁平衡差動保護整定值(一次值)約為5%的電動機額定電流。
3 現有整定方法在石化裝置不同中性點接地系統中的適應性
由于現有石化裝置的大型化和交聯聚乙烯電纜的大量使用,6kV或10kV系統的電容電流越來越大,按照現行國家標準和石化行業標準的要求,石化企業的6kV或10kV系統的中性點接地方式通常采用中性點不接地或中性點諧振接地,也有少數采用中性點低電阻接地[6,7]。
3.1 中性點不接地
根據GB/T 50064-2014,單相接地電容電流不大于10A(不直接連接發電機)的6kV或10kV系統采用中性點不接地方式;當直接連接有發電機不要求瞬時切機時,單相接地電容電流不大于4A(6kV)或3A(10kV)時,系統采用中性點不接地方式。
中性點不接地系統中,當電動機內部發生單相接地故障時,接地點電流為全系統另外兩相對地電容電流之和,此值也是磁平衡差動保護電流互感器TA對應的一次電流值(Ic∑),如圖4所示。

(4)
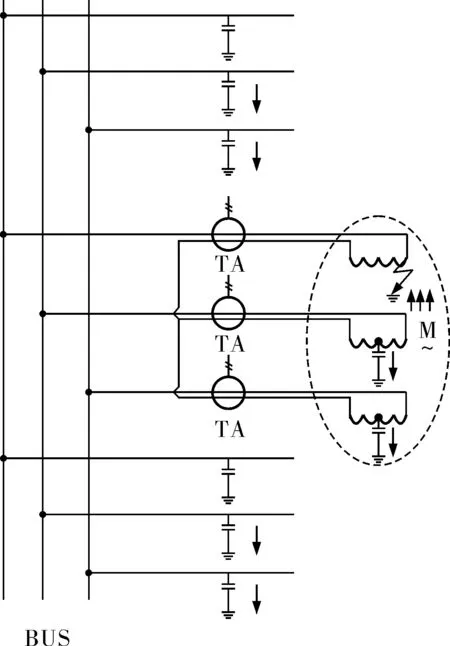
圖4 內部單相短路電容電流分布
考慮Iimb與Ic∑方向的隨機性,保護裝置采集的電流Iop為:
(5)
保護裝置的靈敏系數為:

(6)
取Kk=1.5,Kq=7,Kk·Kq≈10,則有:
(7)

如果系統的Ic∑更小或電動機額定電流更大,磁平衡差動保護將無法反映電動機單相接地短路故障。若要求磁平衡差動保護能夠反映電動機的單相接地短路,則需滿足:
(8)
即:
IcΣ≥16Kp·In
(9)
取Kp=0.5%,IcΣ≥0.08In。
一般來說,6kV或10kV中性點不接地系統,當系統單相接地電容電流不小于8%的電動機額定電流時,磁平衡差動保護能夠反映電動機單相接地短路故障。
另外,GB/T 50062-2008規定:單相接地電流為10A及以上時,保護裝置應動作于跳閘;單相接地電流為10A以下時,保護裝置宜動作于信號。實際應用時,通常依據電動機在工藝流程中的重要性和電動機廠家的推薦來決定保護裝置是出口跳閘還是信號。而現有繼電保護廠家基本上都將磁平衡差動保護出口設置為瞬時動作于跳閘,此種做法欠妥。
3.2 中性點諧振接地
根據GB/T 50064-2014,單相接地電容電流大于10A(不直接連接發電機)的6kV或10kV系統,又需要在接地故障條件下運行時,采用中性點諧振接地;當直接連接有發電機不要求瞬時切機時,單相接地電容電流大于4A(6kV)或3A(10kV)時,系統采用中性點諧振接地。根據GB/T 50064-2014及SH/T 3060-2013等的要求,消弧線圈補償后,故障點殘余電流應不超過5A,當直接連接有發電機時應不超過4A(6kV)或3A(10kV),取最大值5A作為參考進行后續分析。
石化企業通常要求單相接地故障帶故障運行一段時間。因此,按超過上述閾值時,采用中性點諧振接地系統進行分析,具有很強的現實意義。
中性點諧振接地系統中,電動機內部發生單相接地故障時,消弧線圈補償前,系統就是中性點不接地系統,此處不再重復。
消弧線圈補償后,參照前面的分析,保護裝置靈敏系數為:

(10)
式中Ir——故障點殘余電流。
若要求磁平衡差動保護能夠反映電動機的單相接地短路,則需滿足:
Ir≥16Kp·In
(11)
取Ir=5A,Kp=0.5%,計算得In≤62.5A。
而In≤62.5A的電動機(對應10kV電動機約900kW)通常情況下設置電流速斷保護即可滿足要求,而不需要再增設磁平衡差動保護。因此,如需要反映單相接地故障,只有磁平衡差動保護在消弧線圈補償之前動作才有意義。而現有的消弧裝置為了盡可能縮短接地電流持續的時間,通常設置為瞬時動作于補償。這就使得磁平衡差動保護在消弧裝置補償之前動作變得較為困難。
總的來說,如果磁平衡差動保護裝置與消弧線圈補償裝置之間沒有很好的配合,6kV或10kV中性點諧振接地系統,磁平衡差動保護將不能反映電動機單相接地短路故障。
3.3 中性點低電阻接地
根據SH/T 3060-2013的要求,6~35kV主要由電纜線路構成的供、配電系統單相接地故障電容電流較大時,可采用低電阻接地方式。
當采用低電阻接地方式時,通常按照單相接地故障100~1 000A選擇中性點接地電阻。參照前面的分析,中性點低電阻接地系統中,電動機內部發生單相接地故障時,保護裝置靈敏系數為:
(12)
式中If——故障點入地電流。
若要求Klm≥1.5,取If=100,Kp=0.5%,則In最大為1 429A,對應6kV電動機約為12 500kW。即12 500kW及以下的電動機,磁平衡差動保護能較好地反映內部單相接地故障;而12 500kW及以上的大型電動機,通常均采用變壓器-電動機組。因此,通常情況下,靈敏系數均滿足要求。
總的來說,6kV或10kV中性點低電阻接地系統,磁平衡差動保護能夠很好地反映電動機單相接地短路故障。出口動作于跳閘也符合規范要求。
4 建議
鑒于上述分析,石化企業高壓電動機磁平衡差動保護的整定應根據具體的系統接地形式進行具體分析。
4.1 中性點不接地系統
只有當系統單相接地電容電流滿足式(9)時,磁平衡差動保護才能夠較好地反映出電動機單相接地短路故障。如滿足此條件,可按式(2)進行整定。同時依據具體的工程要求,當單相接地故障不要求跳閘時,向繼電保護廠家提出要求,將保護動作區間劃分為兩段:一段為Iset≤Iop<10A,保護動作出口報警;另一段為Iop≥10A,保護動作出口跳閘。
如果系統單相接地電容電流不滿足式(9)時,可將磁平衡差動保護放棄保護電動機的單相接地故障,而由小電流選線等其他裝置去完成電動機的單相接地故障保護。此時磁平衡差動保護用來保護電動機相間短路故障,其定值可設置為:
Iset=Kk·(IcΣ+Iimb)/nTA
(13)
這樣,即可保證電動機啟動、正常運行、外部短路時,磁平衡差動保護均不誤動;而電動機內部發生相間短路時,能可靠動作于跳閘,滿足實際運行需求。
4.2 中性點諧振接地
當系統單相接地電容電流(未補償前)滿足式(9)時,可按式(3)進行整定。但磁平衡差動保護必須與消弧線圈補償聯動,即系統單相接地故障時,消弧線圈補償裝置延時t1補償;磁平衡差動保護裝置瞬時動作出口報警(此時能夠反映電動機具體哪一相發生了單相接地故障),延時t2(t2>t1)動作出口跳閘,保證電動機內部單相接地故障但失去消弧線圈補償時,能可靠跳閘。
當系統單相接地電容電流(未補償前)不滿足式(9)時,即不管是消弧線圈補償前還是補償后,磁平衡差動保護均不能很好反映單相接地故障,建議按式(13)進行整定。此時磁平衡差動保護用來保護電動機相間短路故障。
4.3 中性點低電阻接地
可以按照式(3)進行整定,用來反映電動機單相接地故障,并出口跳閘。
另外,由于磁平衡差動保護的不平衡電流主要與流入和流出磁平衡差動互感器的電流位置不對稱、電動機繞組的對地電容電流和TA本身磁路的不對稱有關。各電動機不平衡電流存在一定的差異,而根據式(9),不平衡電流與磁平衡差動保護反映單相接地故障的電容電流閾值有很大的關聯。因此,針對具體工程,建議先暫按Kp=0.5%進行整定,然后在現場實測磁平衡差動保護的不平衡電流,最后對保護進行相應的調整。
5 結束語
綜上所述,現有可供參考的電動機磁平衡差動保護的整定方法在石化裝置不同中性點接地系統中的適應性各不相同。整定時,建議對不同的中性點接地系統區別對待;有條件的,應實測不平衡電流對整定值進行修正。
[1] 李斌,范瑞卿,賀家李.電動機磁平衡式差動保護的整定計算[J].電力系統保護與控制,2010,38(13):79~82.
[2] 趙倫.電機磁平衡式差動原理與定值整定[J].電工技術,2014,(1):17,20.
[3] GB/T 50062-2008,電力裝置的繼電保護和自動裝置設計規范[S].北京:中國計劃出版社,2009.
[4] 王維儉,張學深.電氣主設備縱差保護的進展[J].繼電器,2000,28(5):6~8.
[5] 王維儉,李芙英.縱聯差動保護原因不明誤動的分析和對策——兼論光電流傳感器的應用[J].電力系統自動化,1999,23(18):17~19.
[6] GB/T 50064-2014,交流電氣裝置的過電壓保護和絕緣配合設計規范[S].北京:中國計劃出版社,2014.
[7] SH/T 3060-2013,石油化工企業供電系統設計規范[S].北京:中國石化出版社,2013.
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
汽車維修與保養(2019年7期)2020-01-06 03:30:42
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
家庭影院技術(2017年9期)2017-09-26 03:41:45
汽車維護與修理(2016年10期)2016-07-10 08:17:41
汽車維修與保養(2015年12期)2015-04-18 07:51:49
汽車維修與保養(2015年6期)2015-04-17 03:31:50