模糊神經網絡控制器在DMF回收系統的設計與應用
2015-01-13 02:00:00王華強程智超
化工自動化及儀表 2015年3期
王華強 程智超
(合肥工業大學電氣與自動化工程學院,合肥 230009)
二甲基甲酰胺(DMF)是一種用途廣泛的化工原料,也是一種優良的溶劑,在合成革工業中被廣泛用于合成革表面處理過程和二層皮濕法移膜表面處理工藝中。PU(聚氨酯樹脂)合成革生產系統產生的廢液中含有大量僅作為溶劑而未參與化學反應的DMF,因此DMF的回收處理很有必要。一方面可以解決含DMF的廢液所帶來的環境污染問題;另一方面回收的DMF可再利用為企業創造經濟效應。DMF的回收屬于典型的化工精餾過程,一般采用雙塔或三塔精餾。回收的原理是利用廢液中各成分(主要是水和DMF)沸點不同(常壓下DMF沸點為152.8℃,水沸點為100℃),通過對各個操作過程的溫度進行控制,形成氣液分離,從而達到提純回收DMF的目的[1]。
筆者的研究對象為雙塔式DMF回收精餾系統,DMF廢液首先經過濃縮塔減壓濃縮。濃縮塔塔壓為負壓,由再沸器供熱,操作溫度為75℃。精餾塔塔壓可以為常壓或略負壓,通過導熱油進行供熱,操作溫度為155℃。精餾塔的精餾段餾出物在冷凝器中冷凝成液體,進入回流罐,一部分回流到頂層塔板,以保持塔頂溫度穩定;另一部分進入脫氨塔,進行脫酸處理,最后得到純度相當高的DMF[2]。
精餾過程塔的溫度是影響塔內氣液平衡的重要參數之一,溫度過高或過低都會影響產品的質量和生產效率。塔壓的波動、進料流量和組成、回流量及再沸器的加熱量等都會對塔的溫度產生影響。在精餾塔溫度控制系統中通過控制載熱劑的流量來進行溫度控制,是目前應用較為廣泛的一種調節方式。
由于被控對象(塔溫)在不同擾動作用下具有延遲性和慣性,僅使用單回路調節系統不能得到較好的調節品質,所以考慮采用串級控制策略。串級控制的抗擾動性能更好,能有效減小副回路的時間常數,從而改善被控對象的動態性能,而且串級控制具有一定的自適應能力,穩態誤差較小。以精餾塔為例,其串級控制系統如圖1所示。
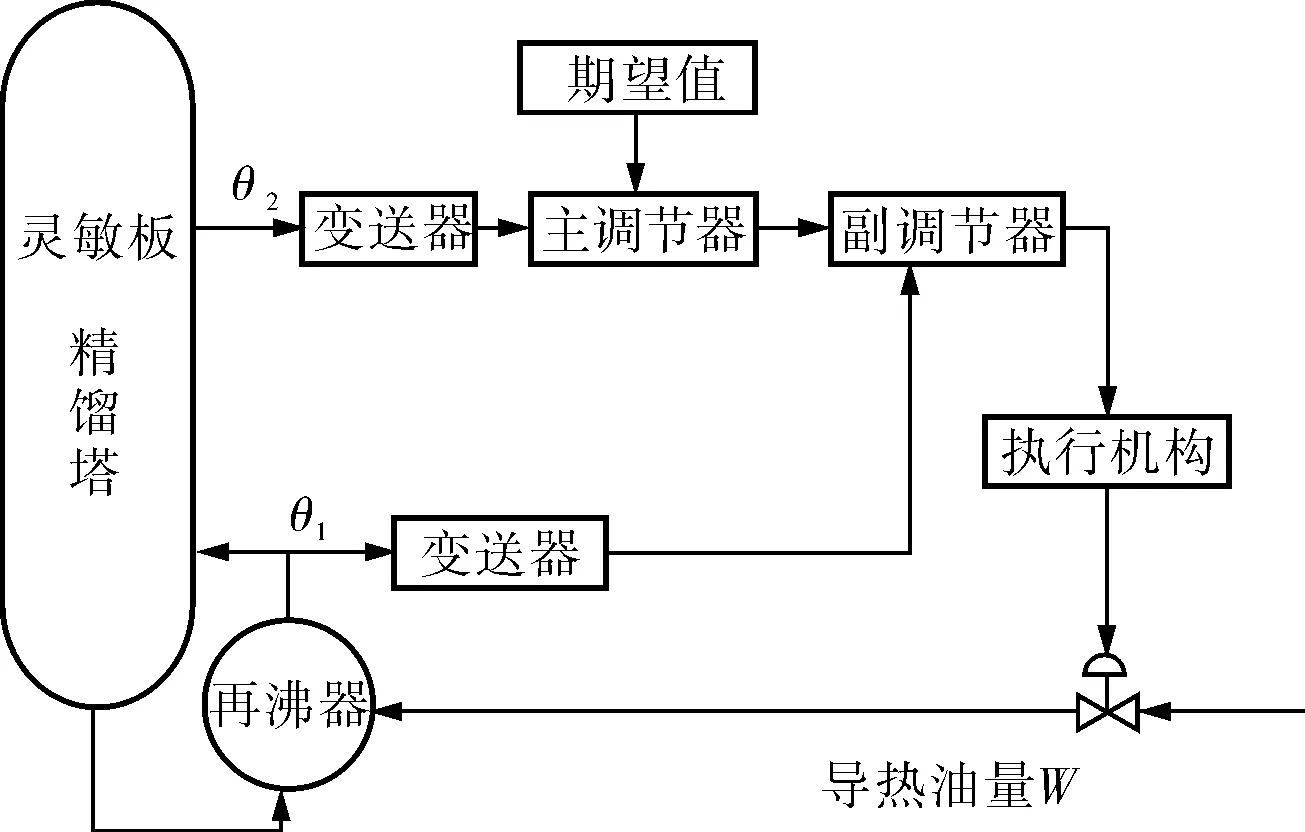
圖1 精餾塔串級控制系統簡圖
當系統中再沸器的出口汽溫θ1發生變化時,副調節器就會通過執行機構來控制閥門,改變導熱油量W,對汽溫θ1進行粗調。主調節器通過檢測靈敏板(精餾塔塔板中溫度變化最靈敏的塔板)溫度θ2與期望值比較,對副調節器進行校正,起到微調作用。串級系統中副回路的主要任務是迅速消除系統的各種擾動,故一般選用純比例調節器,縮短控制過程的時間。主回路的任務是保持θ2的穩定,可選用PID調節器。其控制原理如圖2所示。

圖2 精餾塔溫度串級控制原理框圖
塔釜溫度作為被控對象總是存在著比較大的延時,易產生偏差;影響被控對象的干擾因素很多;塔釜溫度隨時間和塔層的不同特性也不同,很難建立精確的數學模型。基于上述幾點原因,筆者在原有的串級控制系統基礎上采用基于模糊神經網絡的PID控制器,提高對塔釜溫度的控制效果[3]。
2 模糊神經網絡控制器設計
神經網絡和模糊系統都是非線性動力學系統,屬于無模型的控制器,常用來處理不確定、非線性和其他不確定問題。但兩者各有優缺點:模糊系統是通過模擬人的思維模式來進行知識的抽取和簡單推理,但缺乏自學習和自適應能力;神經網絡可以根據相應的樣本進行有效的學習,能實現并行計算和信息分布式存儲,同時具有較強的容錯能力和自適應學習功能。但它不能很好地表達基于規則的知識,因此不能很好地利用已有的經驗知識(一般只能取初始值為零或者隨機值),可能導致網絡訓練時間很長,網絡訓練陷入非要求的局部極值[4]。
2.1 模糊神經網絡控制器總體結構
模糊神經網絡就是將模糊系統與神經網絡結合在一起,將模糊系統轉換為對應的神經網絡,從而提高系統的表達能力和學習能力。筆者設計的模糊神經網絡控制器如圖3所示。
NNI神經網絡辨識器為模糊神經網絡提供一個反傳的校正信號,不斷地對PID參數進行整定。PID控制器采用常規增量式PID控制器,其參數通過模糊神經網絡進行設定。神經網絡選用徑向基神經網絡(RBF),RBF是一種局部逼近網絡,能以任意精度逼近任意連續函數,在學習速度、逼近能力上都要優于常用的BP神經網絡[5]。系統中
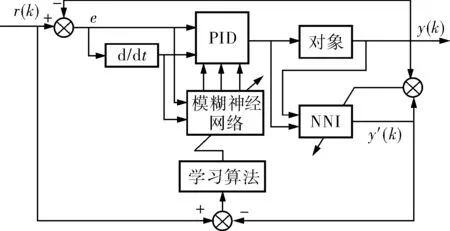
圖3 模糊神經網絡控制器結構框圖
的模糊神經網絡為二輸入三輸出結構:輸入為溫度的誤差和溫度誤差變化率;輸出分別為PID控制器的3個參數Kp、Ki、Kd。
2.2 模糊邏輯設計
輸入量的模糊化。在進行模糊推理前需要將輸入的精確量轉化為模糊量。設系統溫度控制目標為155℃±3℃,誤差e和誤差變化率ec對應的模糊語言變量為E和EC;Kp、Ki、Kd對應的模糊語言變量為ΔKp、ΔKi、ΔKd。E和EC的模糊子集均為{NB,NM,NS,ZE,PS,PM,PB}。ΔKp、ΔKi、ΔKd模糊子集均為{NB,NM,NS,ZE,PS,PM,PB}。根據線性變換法計算出實際偏差e對應的模糊值E,再根據隸屬度函數計算出E屬于模糊語言的隸屬度。為計算方便,將輸入輸出量的模糊論域都設定為[-3,3],隸屬度函數均取高斯型函數。
模糊控制規則。模糊控制規則的設計是模糊控制器設計的關鍵,實質上是對操作工的實踐操作經驗的總結和利用。對于被控過程中不同的e和ec,操作人員憑經驗總結出來對于PID參數Kp、Ki、Kd整定所遵循的幾個原則:當e的絕對值較大時,取較大的Kp和較小的Kd可以使系統具有較好的跟蹤性能,同時對積分作用加以限制(通常取Ki=0),可避免系統響應出現大的超調;當e的絕對值處于中等大小時,Kp取值小些,Ki的取值適當,可使系統響應具有較小的超調,此時Kd的取值是關鍵,它對系統響應的影響最大,若ec的絕對值較大,則Kd取值小些,反之Kd取值大些;當e的絕對值較小時,Kp、Ki取大些可使系統具有較好的穩定性,同時若ec的絕對值較大,則Kd取值小些,反之Kd取值大些[6]。根據上述原則設計模糊規則見表1~3。
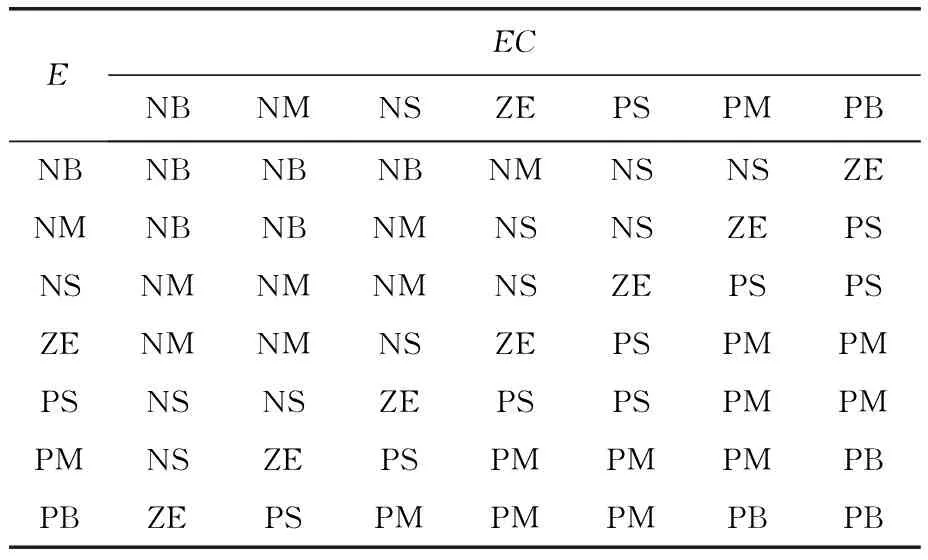
表1 ΔKp的模糊規則
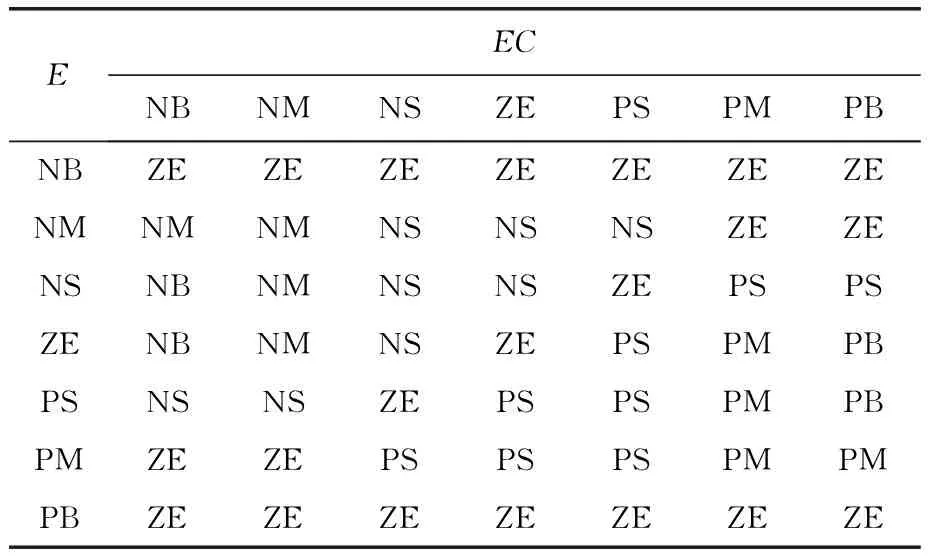
表2 ΔKi的模糊規則
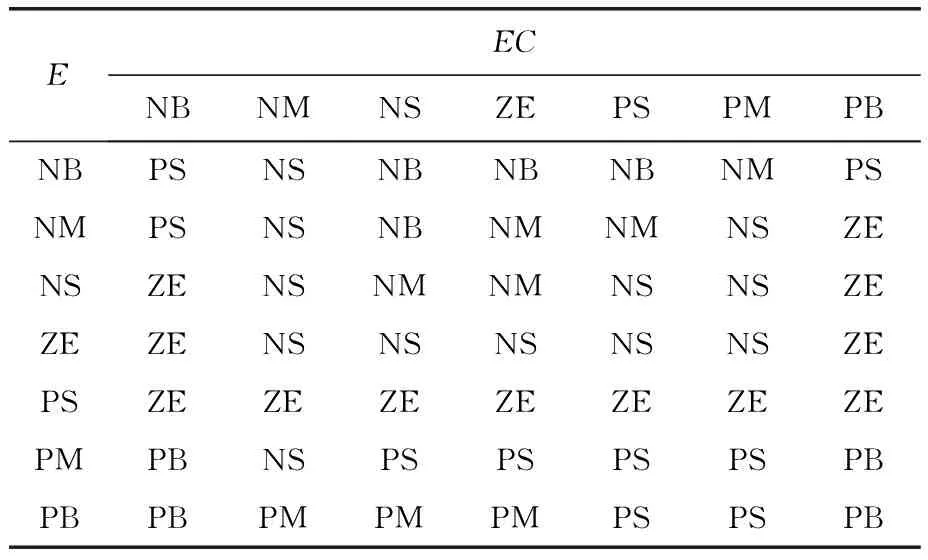
表3 ΔKd的模糊規則
模糊推理和解模糊化。模糊推理就是根據建立好的模糊規則和輸入變量推理出模糊結果。一般形式為IF…THEN…。推理得出的結果是模糊量,需要通過解模糊化轉換為清晰值。解模糊化方法有很多,這里采用最普遍的加權平均法。得到的清晰值并不是最終的實際控制量,還需要經過相應的尺度變換。采用線性變換法,公式如下:
(1)
式中ku——比例因子;
u——實際輸出控制值;
u0——解模糊化得到的清晰值;
umin、umax——基本論域的最小值和最大值;
zmin、zmax——模糊論域最小值和最大值。
2.3 模糊RBF神經網絡結構和算法
2.3.1網絡結構
模糊RBF神經網絡是四層結構,其結構如圖4所示。
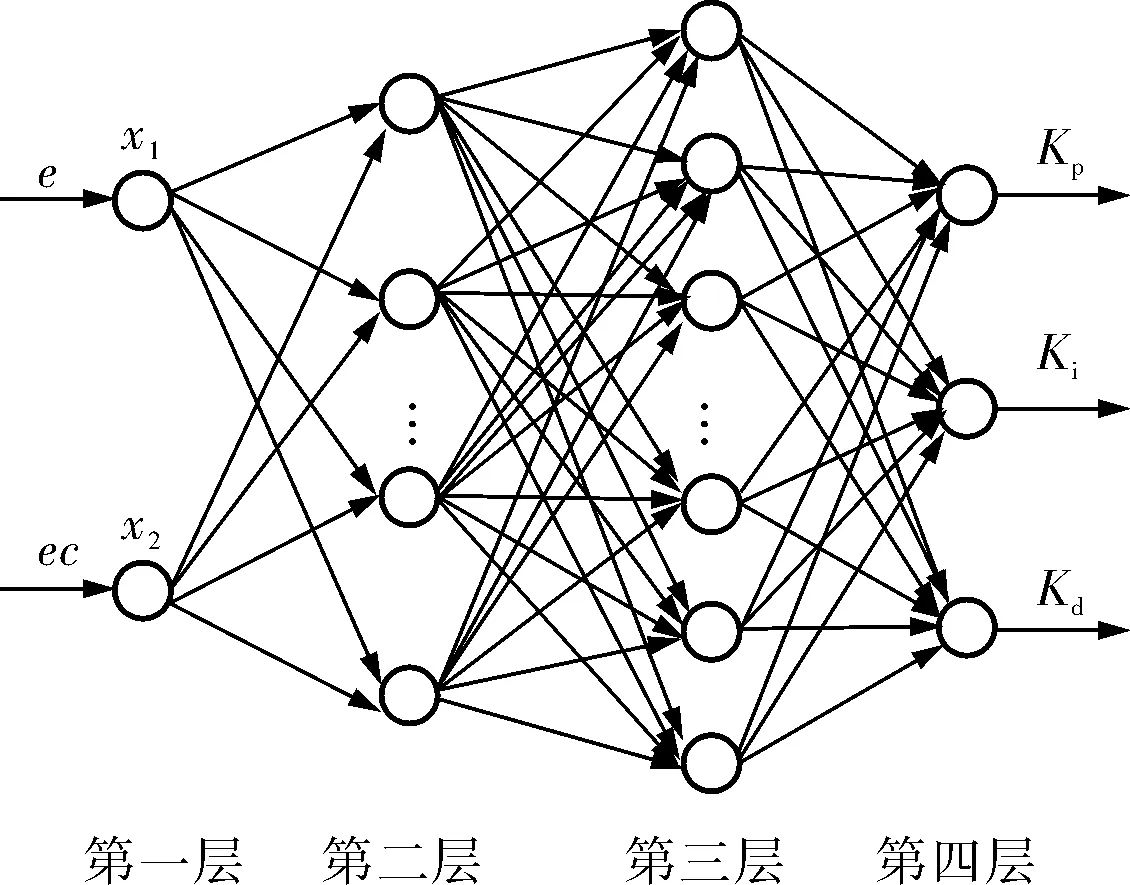
圖4 模糊RBF神經網絡結構
第一層為輸入層。該層的節點與輸入量直接相連,起著將輸入量傳送到下一層的作用[6]。第二層為模糊化層。這層的每個節點就代表了一個語言變量值(如PB、ZE)。它的作用是計算各輸入分量屬于各語言變量值模糊集合的隸屬函數。隸屬函數選用高斯型函數。第三層為模糊推理層。這層的每個節點對應一條模糊規則。它的作用是通過與模糊化層的連接完成模糊規則的匹配,計算每對模糊節點間的激活強度。第四層為輸出層。輸出結果為模糊推理層與各自權值的加權和。模糊神經網路控制器主要通過調整權值、隸屬函數的中心值和寬度來實現控制。
2.3.2學習算法
模糊控制中每個輸入分量的模糊分割數事先設定為7,輸入分量的隸屬函數采用高斯型函數。那么需要學習的參數主要是最后一層的連接權值wij和第二層的隸屬函數中心值cij及其寬度σij。設性能指標函數為:

(2)
式中t(k)——期望輸出;
y(k)——被控對象實際輸出。
每一個迭代步驟k的控制誤差為:
e(k)=t(k)-y(k)
(3)
進而可根據delta學習規則求得節點權值學習算法:

(4)
其中,η為學習速率,η>0;wj為第三層到第四層的權值(j=1,2…,N)。由增量式PID算法得:
u(k)=u(k-1)+Δu
Δu(k)=f4xc(j)
=f4(1)xc(1)+f4(2)xc(2)+f4(3)xc(3)
xc(1)=e(k)-e(k-1)
xc(2)=e(k)
xc(3)=e(k)-2e(k-1)+e(k-2)



其中fi為第i層節點函數,xc為節點輸入值。
考慮學習動量因子α的作用得節點權值、隸屬函數中心和寬度的學習算法為:
wj(k)=wj(k-1)+Δwj(k)+α[wj(k-1)-wj(k-2)]
cij(k)=cij(k-1)+Δcij(k)+α[cij(k-1)-cij(k-2)]
σij(k)=σij(k-1)+Δσij(k)+α[σij(k-1)-σij(k-2)]
3 仿真實驗
模糊神經網絡控制器的仿真實驗在Matlab軟件的Simulink環境下進行。首先要確定仿真對象的數學模型,針對DMF回收精餾塔,采用實驗建模法,擬合出主、副回路的簡單傳遞函數模型為3/(180s+1)和0.2(36s+1)。進行階躍響應實驗,仿真模型如圖5所示[7]。設定常規PID控制副調節器參數K=3,主調節器參數Kp=0.3、Ki=0.001、Kd=20;模糊神經網絡控制器參數Kp=1.2、Ki=0.45、Kd=0.9,學習速率為0.21,動量因子α=0.019。量化因子初始設定為ke=50、kec=80,比例因子初始設定為ku=0.042。
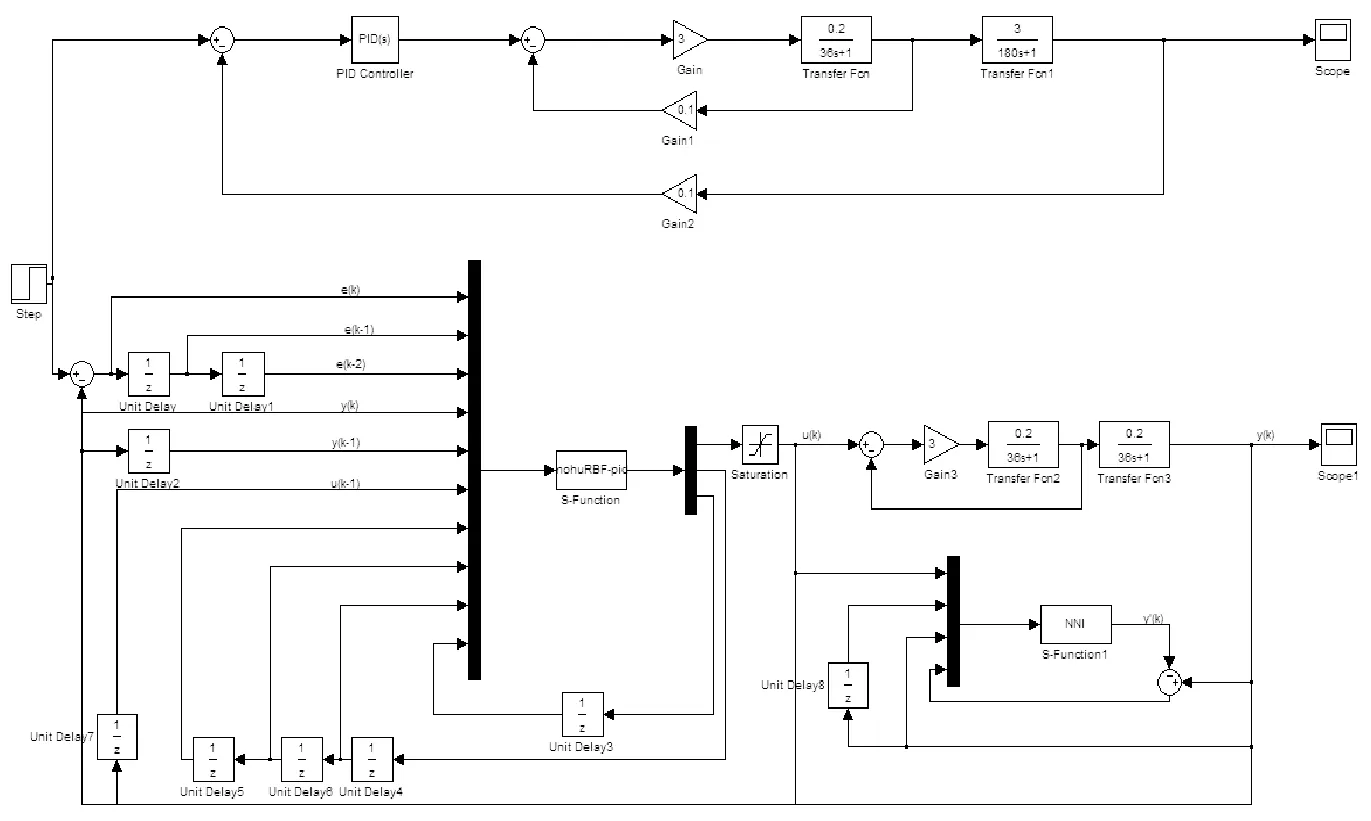
圖5 仿真模型
圖5中的mohuRBF-pid自定義模塊為用S函數編寫的基于模糊RBF網絡的PID控制算法。仿真的結果如圖6所示。
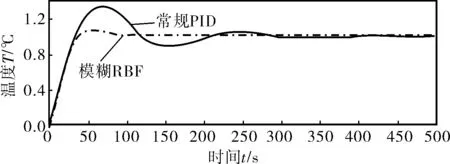
圖6 仿真結果
從圖6中可以看出筆者設計的控制器動態性能優于傳統PID控制,上升速度快,超調量小,調節時間短,穩態誤差小,綜合控制水平高,取得了理想的效果。
4 結束語
通過仿真實驗證明針對DMF回收過程中塔釜溫度控制,筆者所提出模糊RBF神經網絡控制器是切實可行的,而且與常規PID控制相比控制效果更為理想。但仍有改進之處,例如可以考慮將串級控制和前饋控制相結合優化控制策略,神經網絡采用更優的學習算法等。
[1] 俞金壽,顧幸生.過程控制工程[M].北京:高等教
育出版社,2012:284~292.
[2] 陳曦,何益.化工精餾塔的PLC溫度控制系統設計[J].儀表技術與傳感器,2011,(11):77~79.
[3] 王孝武,方敏,葛鎖良.自動控制原理[M].北京:機械工業出版社,2010:35~47.
[4] 李國勇,楊麗娟.神經模糊預測控制及其MATLAB實現[M].北京:電子工業出版社,2013:257~275.
[5] 溫良,付興武.神經網路PID在溫度控制系統中的研究與仿真[J].微計算機信息,2004,(7):3~4.
[6] 李國勇.一種新型的模糊PID控制器[J].系統仿真學報,2003:15(10):1492~1493,1496.
[7] 薛定宇,陳陽泉.基于MATLAB/Simulink的系統仿真技術與應用[M].北京:清華大學出版社,2011:129~153.
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
小獼猴智力畫刊(2022年3期)2022-03-29 01:09:42
數學小靈通(1-2年級)(2021年4期)2021-06-09 06:26:14
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
幸福(2018年33期)2018-12-05 05:22:42
Coco薇(2017年11期)2018-01-03 20:59:57
家庭影院技術(2017年9期)2017-09-26 03:41:45
