基于STC12C5A60S2的點光源自適應控制系統
2015-01-15 03:08:08歐陽輝李澤滔杜嘉明
現代機械 2015年2期
歐陽輝,李澤滔,杜嘉明
(貴州大學電氣工程學院,貴州 貴陽 550025)
0 引言
隨著新能源的發展,越來越多的人開始關注這一行業。太陽能是人們最早接觸找的新能源,但是現在太陽能電池板大多都固定在一個方向使得太陽能的利用率不高[1]。本設計可以拓展為太陽能發電的自動跟蹤系統,該系統不僅能自動根據太陽光方向來調整太陽能電池板朝向,而且在跟蹤過程中能自動記憶和更正不同時間的坐標位置,不必人工干預,特別適合天氣變化比較復雜和無人值守的情況,有效地提高了太陽能的利用率,有較好的推廣應用價值。
1 系統總體設計
控制電路以單片機為核心,能夠對采集的模擬信號進行處理和判斷對步進電機實現控制[2]。系統通過傳感器采集太陽光并將其轉化成單片機能夠識別的信號,通過單片機處理信號并進行判斷,步進電機控制電路根據單片機傳出的信號轉動。系統組成以單片機STC12C5A60S2為核心,光強度檢測模塊,時鐘模塊,步進電機控制電路模塊。傳感器采用光敏電阻,STC12C5A6S2單片機自帶10位A/D,能夠識別模擬信號。并采用光強度檢測電路測量,以光敏電阻傳感器[3]作為測量元件,構成光電測量模塊。系統設計框圖如圖1所示。

圖1 系統總體框圖
2 系統的設計與實現
2.1 系統核心控制
本系統的核心控制器由兩塊STC12C5A60S2[4]組成。單片機1對通過A/D轉換后的數據作出判斷與比較,在P2口發出信號與單片機2通信,如圖2。單片機2通過接收單片機1的P2口發出的信號作出判斷控制水平與豎直方向上的電機運作以求太陽能板正對光線。
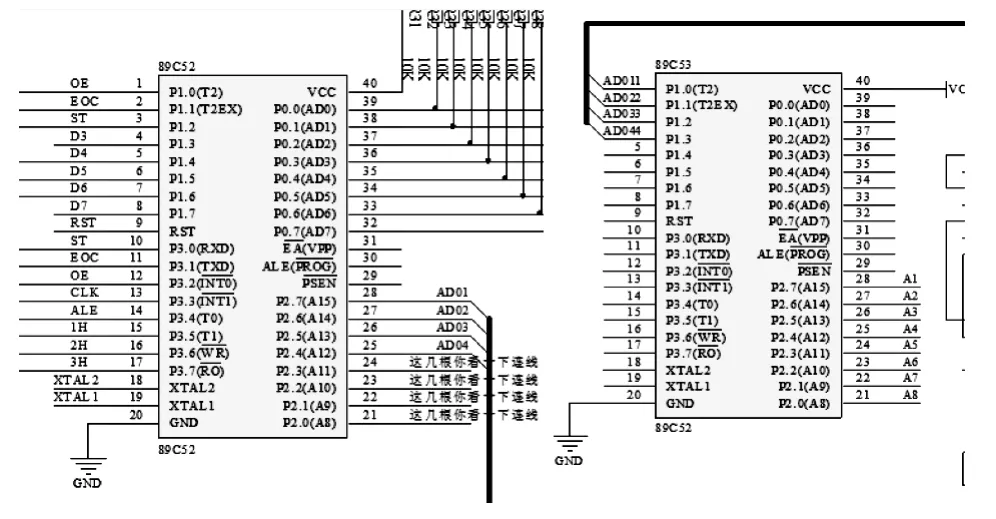
圖2 單片機通訊連接圖
2.2 光強度檢測模塊
比較控制式太陽跟蹤裝置。設置一個直筒形外殼,在直筒外部,東、南、西、北四個方向上分別布置4只光電阻,如圖3。
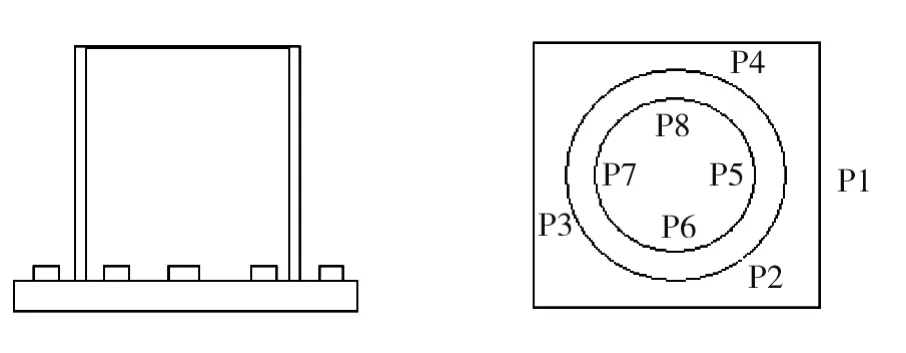
圖3 光敏電阻分布圖
其中一對光敏電阻[5](PI,P3)東西對稱安裝在直筒的兩側,用來粗略的檢測太陽由東往西運動的偏轉角度即方位角;另一對光電阻(PZ,P4)南北對稱安裝在直筒的兩側,用來粗略檢測太陽的視高度即高度角;在直筒內部,東、南、西、北四個方向上也分別布置4只光電阻;其中一對光電阻(PS,P7)東西對稱安裝在直筒的內側,用來精確檢測太陽由東往西運動的偏轉角度;另一對光電阻(P6,PS)南北對稱安裝在直筒的內側,用來精確檢測太陽的高度。其電路圖如圖4所示。
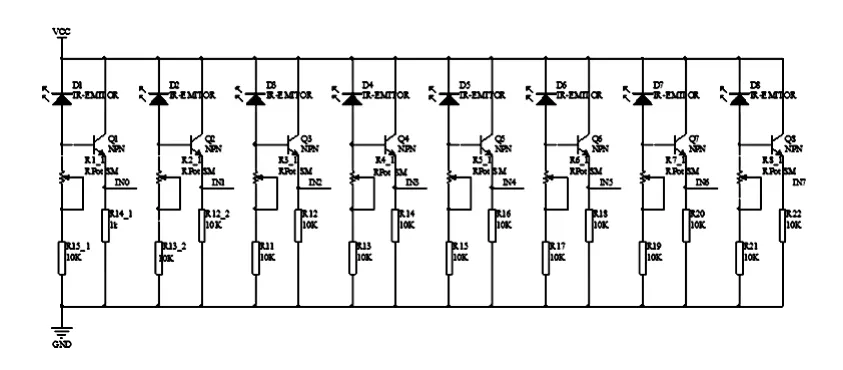
圖4 光敏電阻電路圖
2.3 步進電機模塊
本文選用的是28BYJ-48步進電機,額定電壓5 V,相數為4,步距角 5.625/64,減速比 1∶64。電機線圈由四相組成,即A、B、C、D四相,電機示意圖如圖5所示。
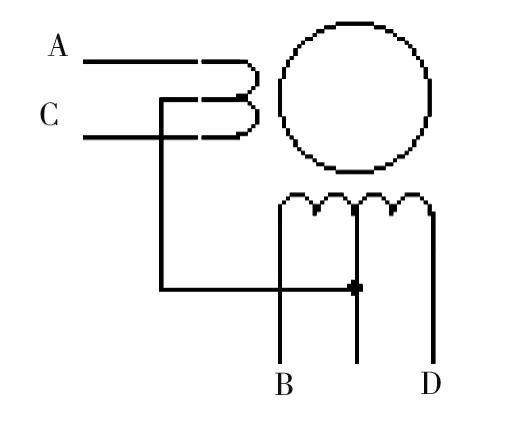
圖5 電機示意圖
步進電機的主要特性:
1)步進電機必須加驅動才可以運轉,驅動信號必須為脈沖信號,沒有脈沖的時候,步進電機靜止,如果加入適當的脈沖信號,就會以一定的角度(稱為步角)轉動。轉動的速度和脈沖的頻率成正比。
2)28BYJ48是減速步進電機,減速比為1∶64,步進角為5.625/64°。如果需要轉動1圈,那么需要360/5.625×64=4 096個脈沖信號。
3)步進電機具有瞬間啟動和急速停止的優越特性。
4)改變脈沖的順序,可以方便的改變轉動的方向。
各線圈通電順序如表1所示。
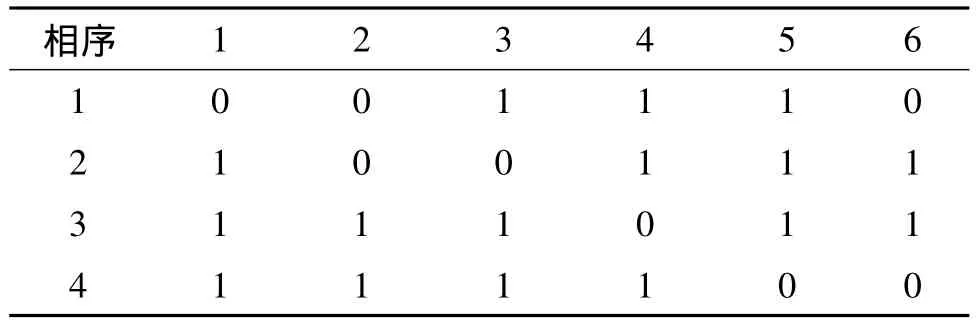
表1 電機相序表
相順序從0到1稱為一步,電機軸將轉過5.625°,四相四拍為0-1-2-3則稱為通電一周,若循環進行這種通電一周的操作,電機便連續的轉動起來,而進行相反的通電順序如3-2-1-0將使電機同速反轉。同理四相八拍的通電順序為AAB-B-BC-C-CD-D-DA-A(本設計用的是四相八拍)。通電一周的周期越短,即驅動頻率越高,則電機轉速越快,但步進電機的轉速也不可能太快,因為它每走一步需要一定的時間,若信號頻率過高,可能導致電機失步,甚至只在原步顫動[6]。
2.4 電機驅動模塊
本文采用單片機STC12C5A60S2對該四線八相制步進電機進行控制。通過I/O口輸出的具有時序的方波作為步進電機的控制信號,信號經過特定芯片驅動步進電機[7]。選用ULN2003構成步進電機的驅動電路。
ULN2003是高耐壓、大電流達林頓陳列,由七個硅NPN達林頓管組成。ULN2003的每一對達林頓都串聯一個2.7 K的基極電阻,在5 V的工作電壓下它能與TTL和CMOS電路直接相連,可以直接處理原先需要標準邏輯緩沖器來處理的數據。ULN2003工作電壓高,工作電流大,灌電流可達500 mA,并且能夠在關態時承受50 V的電壓,輸出還可以在高負載電流并行運行。驅動電路如圖6所示。
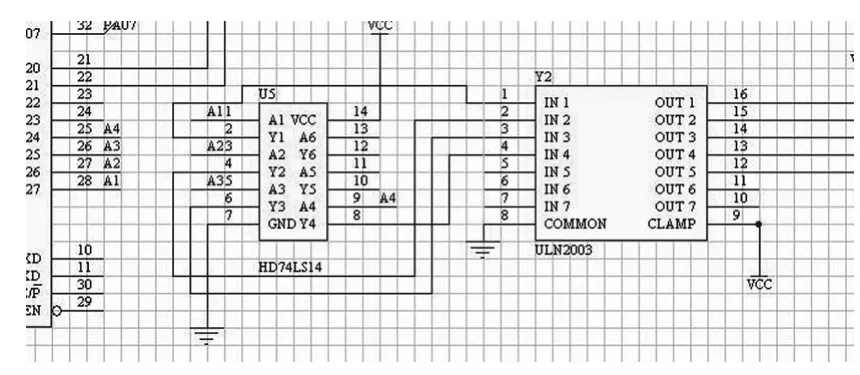
圖6 電機驅動電路
2.5 系統軟件設計
本設計,程序采用C語言進行設計,編譯環境為Keil uVision4。程序中主要有以下幾個主要子程序:主程序,初始化、采集、轉換數據程序,電機驅動控制程序[8]。轉換過程中光敏電阻的采光是時時變化的,所以A/D通道的數據比較過程會有一定波動,如不加閥值比較則會致使電機不停工作,最后太陽能板無法準確對光。在閥值的選定上,通過實物測試,最后選定在+5(-5)。這個閥值既能保證數據比較的準確性又能保證電機的正常運轉。系統軟件主要流程圖如圖7。

圖7 軟件流程圖
3 結束語
本文通過兩片STC12C5A60S2分別控制數傳感器信號的采集與比對和電機驅動控制電路實現了點光源的自適應控制。同時又利用STC12C5A60S2內部計時器,節約了大量資源。在進行實驗后,本設計的各方面的性能均能達到設計前的要求,對太陽能板實時跟蹤太陽具有一定的意義,具有一定的推廣價值。
[1] 琪琳,吳曉鳳.基于ARM的光源跟蹤系統的設計[J].電子測試,2011(02):61-64
[2] 張毅剛.單片機原理及應用[M].北京:高等教育出版社,2010.5
[3] 金發慶.傳感器技術與應用[M].北京:機械工程出版社,2012:11-14
[4] 宋鳳娟,付侃,薛雅麗.STC12C5A60S2單片機高速A/D轉換方法[J].煤礦機械,2010(06):219-221
[5] 夏淑麗,張江偉.基于光敏技術的點光源跟蹤系統的設計[J].化工自動化及儀表,2011(02):291-294
[6] 劉寶志.步進電機的精確控制方法研究[D].山東:山東大學碩士論文,2010
[7] 林敏,等.計算機控制技術及工程應用[M].北京:國防大學出版社,2009.1
[8] 郭天祥.新概念51單片機C語言教程[M].北京:電子工業出版社,2009
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
鴨綠江(2021年35期)2021-04-19 12:24:18
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
電子制作(2019年13期)2020-01-14 03:15:28
電子制作(2019年15期)2019-08-27 01:12:10
電子制作(2019年9期)2019-05-30 09:42:02
電子制作(2018年11期)2018-08-04 03:25:42
家庭影院技術(2017年9期)2017-09-26 03:41:45
