基于第一視角飛行的仿真平臺搭建
2015-01-16 03:19:45沈陽航空航天大學伍美香長城汽車股份有限公司杰沈陽航空航天大學張鵬飛劉丙濤張紅梅
電子世界 2015年24期
關鍵詞:信息
沈陽航空航天大學 伍美香長城汽車股份有限公司 朱 杰沈陽航空航天大學 張鵬飛 劉丙濤 張紅梅
基于第一視角飛行的仿真平臺搭建
沈陽航空航天大學 伍美香
長城汽車股份有限公司 朱 杰
沈陽航空航天大學 張鵬飛 劉丙濤 張紅梅
融合了虛擬現實技術、傳感技術、無人機控制技術的第一視角飛行實時性好,可解決無人機無法實時捕捉瞬時景象的問題。本文設計了第一視角仿真平臺。此平臺分為空中飛行平臺和地面控制單元,它們通過一個雙向傳輸的通道傳輸信息。采用人在回路方式,無人機飛行姿態信息和實時景象同時展現在操作者視景中,實現無人機對移動目標的實時監控。本系統成本低,圖像清晰,具有較好的應用前景。
第一視角飛行;無人機控制;人在回路;飛行可視化
1 引言
無人機已經經歷了越南戰爭、中東戰爭、海灣戰爭、阿富汗戰爭以及伊拉克戰爭的考驗。無人機負擔了偵查監視、目標定位、戰斗評估等重要任務[1]。隨后,無人機視覺技術逐漸由軍用轉向民用,可用于地質勘測、地理測繪、人員搜救、目標追蹤、災害監測等[2]。
針對無人機進行目標定位和跟蹤的問題,研究成果有很多。文獻[3]給出了一種從小型固定翼無人機獲取的圖像中定位地面目標的方法。該方法中,應用目標在圖像中的像素位置,結合無人機位置、高度和相機姿態角,可在全局坐標上對目標進行定位。卡基梅隆大學早在1996研制的無人機2號已經具備對緩慢移動的目標進行跟蹤的能力[4],但其定位精度以及跟蹤性能還有待改善。美國加州大學伯克利分校提出了一種基于計算機視覺的無人機自動導航系統,該系統利用視覺信息進行地面場景的3D動態建模,再融合GPS/INS等導航信息,引導無人機按照事先規劃好的航線飛行[5]。我國中科院沈陽自動化所研制的小型無人直升機,與2009年9月正式展出,它可以廣泛用于監視、勘測、實驗等多種用途[6]。這些成果大多偏于理論研究,研究圖像識別算法,或者研究跟蹤策略,尚未形成成熟可用的產品。并且這些技術方案技術難度大,成本高昂。
融合了虛擬現實技術、傳感技術、無人機控制技術采用人在回路的方式。它不但能給予航模愛好者逼真的駕駛體驗,充分發揮“人”在系統中處理信息,執行無人機實時控制的作用,降低了監控飛行平臺的技術難度,提高了實時監控能力,有利于發揮無人機在軍民用任務中的應用潛力。國內外的航模愛好者從使用的設備與技術及平臺的搭建等多個方面對第一視角飛行進行了粗略的論述[7-11],但這些論述都不系統,不深入。
本文中搭建的第一視角飛行平臺總體分為空中飛行平臺和地面控制單元,它們通過一個雙向傳輸的通道傳輸信息。應用攝像機采集信息,采用人在回路方式,無人機飛行姿態信息和實時景象同時展現在操作者視景中,由“人”處理信息,控制無人機的飛行,實現無人機對移動目標的實時監控,通過第一視角飛行平臺搭建解決地面監測無法實時捕捉無人機飛行瞬態景象的問題。檢測分析系統的總體性能,最終得到滿意的實時圖像。
2 第一視角工作原理
如圖1所示,四旋翼上搭載兩自由度云臺,云臺上裝載攝像頭。視頻眼鏡和遙控器由數據線連接,當視頻眼鏡輸出頭傳信息給遙控器時,遙控器通過數據線為視頻眼鏡供電。

圖1 平臺工作原理圖
攝像頭所采集的音視頻信息由無線音視頻發射機發出,同時無人機的姿態信息通過視頻疊加器(OSD)疊加到圖像上,被地面裝有信號接收器的視頻眼鏡接收后呈現人眼中,完成第一視角飛行的圖像信息傳輸。R/C遙控器將操作者頭傳信息和遙控指令信息同時發送給模型飛機的R/C接收機,云臺根據頭轉信息進行平面轉動和傾斜,以此調節攝像頭的姿態;同時,經過操作者的分析判斷后,通過手持的R/C遙控器對四旋翼發出控制指令,搭載在四懸翼上的R/C接收機接收控制指令,并把信息傳遞給飛控系統(APM),改變每個電機的轉速實現飛行器的俯仰偏航控制,完成人在回路的飛行控制。
3 系統實現
如圖2所示,硬件設備包括視頻眼鏡、攝像頭等。所有設備都集成在一起,通過有獨立開關的控制面板供電。
(1)視頻眼鏡:把傳輸到地面的信息呈現到人眼中,產生頭傳指令信息。
(2)無線接收機:用于接收從無人機發出的視頻信號。
(3)R/C遙控器:通過數據線與視屏眼鏡相連,為視屏眼鏡供電,同時為模型飛機提供地面控制指令和隨動信息,完成整個系統的閉環控制。
(4)數傳遙控模塊:XBee模塊是一種遠距離低功耗的數傳模塊,其使用串口通信方式,每個模塊都可以為路由節點,協調器,以及終端節點。
(5)視頻疊加器(OSD):把無人機的狀態,疊加到所傳的圖像上。
(6)飛控系統(APM):基于慣性導航的開源飛行控制系統。
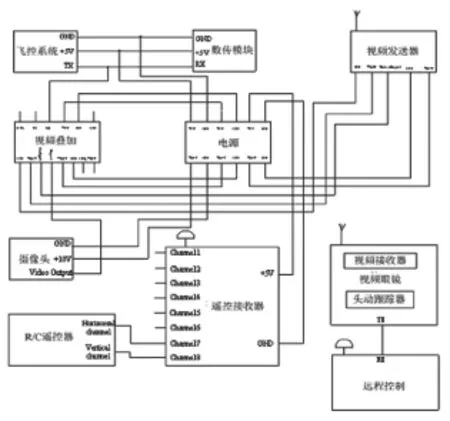
圖2 平臺系統電氣連接
4 直升機平臺
四旋翼直升機通過四個螺旋槳產生的升力實現飛行。四個旋翼位于一個幾何對稱的十字支架前、后、左、右四端,如圖3所示。旋翼由電機控制;整個飛行器依靠改變每個電機的轉速來實現飛行姿態控制。
在圖3中,前端旋翼1 和后端旋翼3 逆時針旋轉,而左端旋翼2和右端的旋翼4 順時針旋轉,以平衡旋翼旋轉所產生的反扭轉矩。由此可知,懸停時,四只旋翼的轉速應該相等,以相互抵消反扭力矩;同時等量地增大或減小四只旋翼的轉速,會引起上升或下降運動;增大某一只旋翼的轉速,同時等量地減小同組另一只旋翼的轉速,則產生俯仰、橫滾運動;增大某一組旋翼的轉速,同時等量減小另一組旋翼的轉速,將產生偏航運動。

圖3 四旋翼飛行器旋翼旋轉方向示意圖
用四旋翼直升機搭載兩自由度云臺,云臺上裝載攝像頭。當地面接收到控制傳回的圖像信息,經過操作者的分析判斷后,通過手持的R/C遙控器對四旋翼發出控制指令,搭載在四懸翼上的R/C接收機接收控制指令,并把信息傳遞給飛控系統(APM),飛控APM發出指令改變每個電機的轉速,實現直升機的俯仰、偏航控制,完成人在回路的飛行控制。
5 測試
在飛行實驗中,視頻眼鏡呈現的圖像給人身臨其境的感覺,猶如自己駕駛著模型飛機。呈現在屏幕上的實時信息準確快速,與操作者控制指令信息幾乎同步,實現了第一視角飛行的真實體驗。如圖(4)、圖(5)、圖(6)所示。

圖4 實驗測試圖(0度)
圖5 實驗測試圖(7度)

圖6 實驗測試圖(-32度)
6 結論
經實驗,本系統信號傳輸穩定,所傳圖像清晰,抗干擾能力強。系統搭建完成了地面控制與空中飛行過程的閉環控制,地面控制對無人機的姿態信息和瞬態景象信息快速掌握,并通過頭傳信息、遙控指令信息對攝像頭、模型飛機進行指令控制,實現了人在回路的第一視角可視化飛行,改善了飛行控制系統的準確性和快速性,系統效率高,實施簡單便宜,具有較好的應用前景和使用價值。
[1]董國忠,王省書,胡春生.無人機的應用及發展趨勢[J].國防科技,2006,10:34-38.
[2]秦博.王蕾無人機發展綜述[J].飛航導彈,2002,8:4-10.
[3]J.Redding,T.W.McLain,R.W.Beard,C.Taylor.Vision-based Target Localization from a Fixed-wing Miniature Air Vehicle[J].American Control Conferrence.2006:2862-2867.
[4]Omead.Amidi,T.Kanade,R.Miller. Vision-based Autonomous Helicopter Research at Carnrgie Mellon Robotics Institute[J].IEEE/SPIE Robust Vision for Vision-based Control of Motion,1999:221-232.
[5]Bruno.Sinopoli,Mario.Micheli.Vision Based Navigation for An Unmanned Aerial Vechile[J].IEEE/ICRA International Conference on Robotics and Automation,2003,2:1757-1764.
[6]新華網.國產ServoHeli-120型自主旋翼無人機亮相[EB].http://war.163.com/09/0909/10/51OVQ1L600011MTO.html.
[7]楊貴慈,海鷗.充滿魅力的第一視角飛行[J].航空模型,2009(9): 40-43.
[8]張弓.第一視角飛行入門[J].航空模型,2010(11):31-33.
[9]一帆.簡易FPV地面站的制作[J].航空模型,2011(6):39-43.
[10]張寶健.給模型飛機一雙慧眼:改造第一視角飛行中的微型DV[J].航空模型,2011,12:54-58.
[11]Rolf,張弓.第一視角飛行新概念[J].航空模型,2012,01:31-33.
指導老師:張紅梅。
2015年沈陽航空航天大學大學生創新創業訓練計劃項目(DX501303)。
猜你喜歡
中華手工(2017年2期)2017-06-06 23:00:31
中外會展(2014年4期)2014-11-27 07:46:46
大眾創業(2009年10期)2009-10-08 04:52:00
數字社區&智能家居(2009年7期)2009-09-29 08:16:48
數字社區&智能家居(2009年11期)2009-06-25 04:30:34
數字社區&智能家居(2009年3期)2009-04-21 03:09:04
數字社區&智能家居(2009年2期)2009-03-27 04:33:44
數字社區&智能家居(2009年12期)2009-02-03 07:50:48
建筑創作(2001年3期)2001-08-22 18:48:14
祝您健康(1987年3期)1987-12-30 09:52:32