基于Lagrangian支持向量機(jī)的機(jī)械手魯棒自適應(yīng)控制
2015-02-24 05:14:36劉紅平
計(jì)算機(jī)工程與應(yīng)用 2015年5期
關(guān)鍵詞:系統(tǒng)
劉紅平
長沙師范學(xué)院 電子信息工程系,長沙 410100
1 引言
多關(guān)節(jié)機(jī)械手系統(tǒng)是一個(gè)多輸入多輸出、高度耦合的復(fù)雜非線性系統(tǒng)。如果能夠得到描述機(jī)器人動(dòng)力學(xué)的精確數(shù)學(xué)模型,那么計(jì)算力矩控制[1]就能夠有效地實(shí)現(xiàn)機(jī)器人的軌跡跟蹤控制。然而,計(jì)算力矩控制必須事先精確獲得機(jī)器人的動(dòng)力學(xué)模型的先驗(yàn)知識(shí)。但在實(shí)際中,即使獲得一個(gè)較為理想的機(jī)器人動(dòng)力學(xué)模型也是很困難的。經(jīng)典的PD控制不依賴系統(tǒng)模型,然而難以保證系統(tǒng)的穩(wěn)定性和控制精度。在系統(tǒng)模型未知的情況下,為實(shí)現(xiàn)機(jī)械手的高性能控制,通常在控制律中引入補(bǔ)償項(xiàng),以消除不確定性因素的影響。傳統(tǒng)的控制方法由于控制精度低(如:PID控制)或缺乏魯棒性(如:計(jì)算轉(zhuǎn)矩控制)等原因,往往難以保證良好的動(dòng)態(tài)性能。考慮到神經(jīng)網(wǎng)絡(luò)強(qiáng)大的非線性逼近能力,可以補(bǔ)償各種非線性未建模動(dòng)態(tài)的影響,因此,基于神經(jīng)網(wǎng)絡(luò)的控制方法成為機(jī)械手智能控制的重要手段[2-6]。然而,由于神經(jīng)網(wǎng)絡(luò)固有的缺乏泛化性和容易陷入局部極小的缺陷,在一定程度上限制了其應(yīng)用。支持向量機(jī)的提出,有效地解決了這一問題[7-10]。
支持向量機(jī)(SVM)是一種基于統(tǒng)計(jì)學(xué)習(xí)理論的學(xué)習(xí)機(jī)[10-14],通過結(jié)構(gòu)風(fēng)險(xiǎn)最小化準(zhǔn)則來提高泛化能力。相對(duì)神經(jīng)網(wǎng)絡(luò)來說,SVM具有嚴(yán)格的理論基礎(chǔ),在訓(xùn)練中不存在陷入局部最優(yōu)和維數(shù)災(zāi)難問題,小樣本學(xué)習(xí)也具有很強(qiáng)的泛化能力。文獻(xiàn)[15]在標(biāo)準(zhǔn)的支持向量機(jī)基礎(chǔ)上提出了一種改進(jìn)的Lagrangian支持向量機(jī)(LSVM),并將其應(yīng)用到分類問題,實(shí)驗(yàn)結(jié)果表明,Lagrangian支持向量機(jī)具有更快的計(jì)算速度[16-20]。
本文首先將Lagrangian支持向量機(jī)推廣應(yīng)用到回歸問題,學(xué)習(xí)過程采用梯投影法[21-23];然后將Lagrangian支持向量機(jī)應(yīng)用于機(jī)械手的滑模控制。具體來說,首先通過Lagrangian支持向量機(jī)對(duì)機(jī)械手系統(tǒng)進(jìn)行非線性補(bǔ)償;然后進(jìn)一步在線調(diào)整參數(shù),并增加一個(gè)滑模魯棒控制項(xiàng)來消除逼近誤差對(duì)跟蹤性能的影響。最后,通過仿真實(shí)現(xiàn),驗(yàn)證了以上控制方法的有效性。
2 Lagrangian支持向量機(jī)
2.1 LSVM分類
首先考慮標(biāo)準(zhǔn)的支持向量機(jī)分類(SVC),標(biāo)準(zhǔn)的二階范數(shù)軟間隔SVC形式為:

其中,w=(w1,w2,…,wm)T∈Rm,φ(?):Rn→Rm為非線性映射;b為截距,C為正則參數(shù),ξi為松弛變量;((x1,y1),(x2,y2),…,(xl,yl))為給定的樣本集,l為樣本個(gè)數(shù)。其對(duì)偶問題為:


上述SVC的特點(diǎn)是:含有等式約束,且當(dāng)樣本不可分時(shí)的取值并不唯一。Lagrangian支持向量機(jī)是上述標(biāo)準(zhǔn)SVC的一種改進(jìn),在目標(biāo)函數(shù)b2中增加了項(xiàng),對(duì)應(yīng)的LSVC形式如下:

通過引入拉格朗日函數(shù),可將以上問題求解轉(zhuǎn)化為如下對(duì)偶問題:

式(5)相對(duì)式(2)來說,沒有了等式約束。因此,使得對(duì)應(yīng)問題的求解相對(duì)簡單。設(shè)對(duì)偶問題(5)的最優(yōu)解為,則唯一的b*滿足以下條件:

這樣得到如下的判別函數(shù):

2.2 LSVM回歸
為了能夠?qū)agrangian支持向量機(jī)(LSVM)應(yīng)用于函數(shù)逼近,將上述LSVM推廣應(yīng)用到回歸問題。首先定義Huber損失函數(shù):

其中ε為不敏感參數(shù)。對(duì)于具有Huber損失函數(shù)的LSVR定義如下:
通過引入約束優(yōu)化問題(9)的拉格朗日函數(shù),并利用KKT互補(bǔ)條件,得到其對(duì)偶問題為:

假定通過求解上述二次規(guī)劃問題,得到最優(yōu)解,則相應(yīng)的回歸函數(shù)為:

得到的Lagrangian支持向量機(jī)回歸結(jié)構(gòu)如圖1所示,其中xi為支持向量機(jī)的輸入,y為輸出;βi可以看作支持向量機(jī)網(wǎng)絡(luò)的輸出權(quán)值。
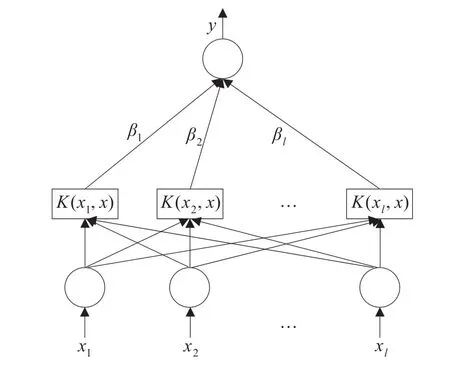
圖1 LSVR結(jié)構(gòu)示意圖
3 LSVR的學(xué)習(xí)
本部分主要研究如何通過樣本學(xué)習(xí)獲得LSVR的未知參數(shù)βi。為獲得最優(yōu)參數(shù),必須求解含約束的二次規(guī)劃問題(11)。首先將式(11)改寫為如下矩陣形式:




將采用如下梯度投影法求解參數(shù)β:

其中,βk為k時(shí)刻變量β所在位置,s>0為學(xué)習(xí)步長。
下面,將研究參數(shù)學(xué)習(xí)過程的收斂性。對(duì)于由式(16)描述的迭代學(xué)習(xí)過程,有如下定理:
定理1設(shè)β*為二次規(guī)劃問題(12)的唯一最優(yōu)解,則當(dāng) 0<s<2/λmax時(shí),迭代式(16)收斂于β*,其中λmax為矩陣A的最大特征值。
證明β*由于為式(12)的唯一最優(yōu)解,則β*必滿足最優(yōu)條件:

將式(16)(17)兩式相減,得:

設(shè)矩陣A的特征值為λi,i=1,2,…,l,要使得βk收斂于β*,必須有:

由此即可得 0<s<2/λmax時(shí),βk收斂于β*,故得證。
4 機(jī)械手控制
在本章中,將把Lagrangian支持向量機(jī)回歸(LSVR)應(yīng)用于機(jī)械手系統(tǒng)的控制。對(duì)于具有n自由度的機(jī)械手,其動(dòng)力學(xué)方程為:

其中,q∈Rn為關(guān)節(jié)角位移量,M(q)∈Rn×n為慣性矩陣,C(q,)∈Rn為向心力和哥氏力,G(q)∈Rn為重力矩,F(xiàn)()∈Rn為摩擦力,τ∈Rn為控制力矩。系統(tǒng)(20)具有如下性質(zhì):
性質(zhì)1(q)-2C(q,)為反對(duì)稱矩陣,即:

性質(zhì)2慣性矩陣M(q)為有界的對(duì)稱正定矩陣,即存在m1,m2>0使得:m1I≤M(q)≤m2I
在本文中,系統(tǒng)的控制目標(biāo)為使得關(guān)節(jié)輸出q(t)跟蹤參考輸出qd(t)。對(duì)應(yīng)跟蹤誤差為:

定義誤差函數(shù):

其中,Λ為對(duì)稱正定矩陣,則


其中,Kv為對(duì)稱正定矩陣。當(dāng)f未知時(shí),用支持向量機(jī)去學(xué)習(xí)f,用其估計(jì)值代替f。然而,由于估計(jì)誤差的存在,使得控制器(24)并不能保證閉環(huán)系統(tǒng)的穩(wěn)定性,必須對(duì)控制律進(jìn)行修正。根據(jù)支持向量機(jī)回歸逼近理論,存在一個(gè)最佳逼近,使得:

其中Δ為有界的逼近誤差,W*為最佳逼近參數(shù),K(x)為核函數(shù)。然而,在實(shí)際中通過有限樣本的學(xué)習(xí)難以精確獲得最佳參數(shù),一般只能獲得參數(shù)的近似估計(jì)值,即

此時(shí)控制力矩為:


觀察上式,可以將其看作關(guān)于參數(shù)的含有結(jié)構(gòu)不確定性Δ(t)的模型。對(duì)于參數(shù)不確定性,設(shè)計(jì)參數(shù)自適應(yīng)律,對(duì)于結(jié)構(gòu)不確定性,可在控制器式(28)的基礎(chǔ)上增加一個(gè)魯棒控制器。在設(shè)計(jì)魯棒控制器時(shí),假設(shè)存在常數(shù)L>0,使得有界的逼近誤差實(shí)際中,逼近誤差的界也常難以直接得到,因此,先給定L的一個(gè)估計(jì)值,然后再進(jìn)行在線調(diào)整。
綜合以上分析,實(shí)際的控制器由兩部分組成:

且對(duì)應(yīng)的參數(shù)自適應(yīng)律為:

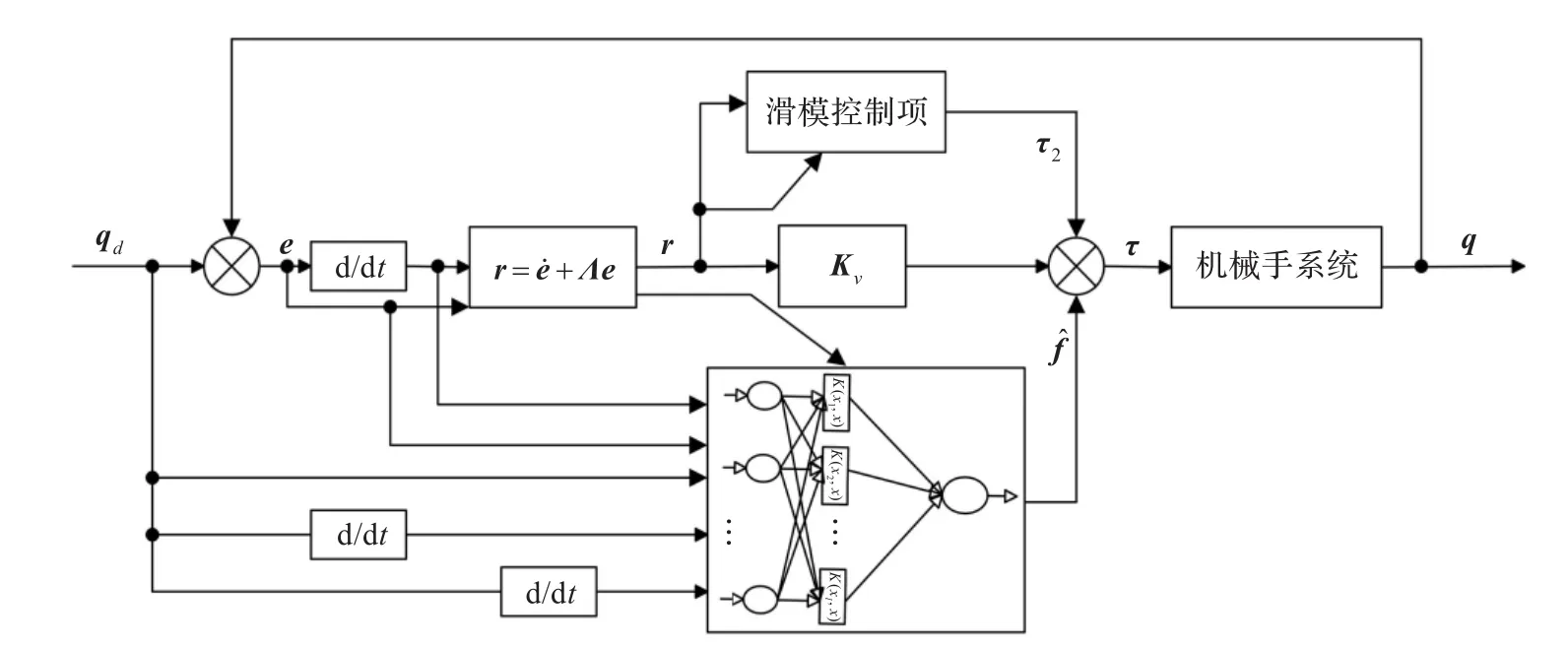
圖2 LSVR控制器框圖
對(duì)于此控制器有如下定理:
定理2對(duì)于由式(20)描述的機(jī)械手系統(tǒng),若系統(tǒng)控制器由式(29)~(33)確定,則閉環(huán)控制系統(tǒng)漸近穩(wěn)定。
證明定義系統(tǒng)的Lyapunov函數(shù):

對(duì)以上Lyapunov函數(shù)求導(dǎo)得:
故由Lyapunov穩(wěn)定性理論可得系統(tǒng)的漸近穩(wěn)定性,定理得證。
5 仿真實(shí)例
以兩關(guān)節(jié)機(jī)械手為例,對(duì)本文提出的控制方法進(jìn)行仿真。考慮如圖3所示的二關(guān)節(jié)機(jī)器手系統(tǒng),其動(dòng)力學(xué)模型由式(20)描述,其中:


首先利用LSVM對(duì)系統(tǒng)進(jìn)行非線性補(bǔ)償,其中LSVM的正則參數(shù)C=5,高斯核函數(shù)中的寬度參數(shù)σ=2。實(shí)施控制時(shí),相應(yīng)的控制參數(shù)取為:Kv=diag(15,10),Λ=diag(5,5),kL=0.5,Γ=10。所得到的仿真結(jié)果如圖4和圖5所示。另外,為突出跟蹤效果,將本文所提出的方法與經(jīng)典的PD控制方法進(jìn)行了對(duì)比,其中比例和微分系數(shù)的大小選擇與本文提出的控制器中誤差和誤差變化率的系數(shù)相同。跟蹤誤差比較效果如圖6和圖7所示。觀察仿真結(jié)果可知,本文設(shè)計(jì)的控制器實(shí)現(xiàn)了對(duì)參考信號(hào)的跟蹤,且比PD控制具有更好的跟蹤性能。這是因?yàn)楸疚奶岢隹刂破骺梢钥醋髟赑D控制器的基礎(chǔ)上增加了一個(gè)非線性前饋補(bǔ)償器,前饋補(bǔ)償能夠抵消系統(tǒng)非線性和不確定性的影響,有助于提高控制器的跟蹤性能。

圖3 兩關(guān)節(jié)機(jī)械手模型
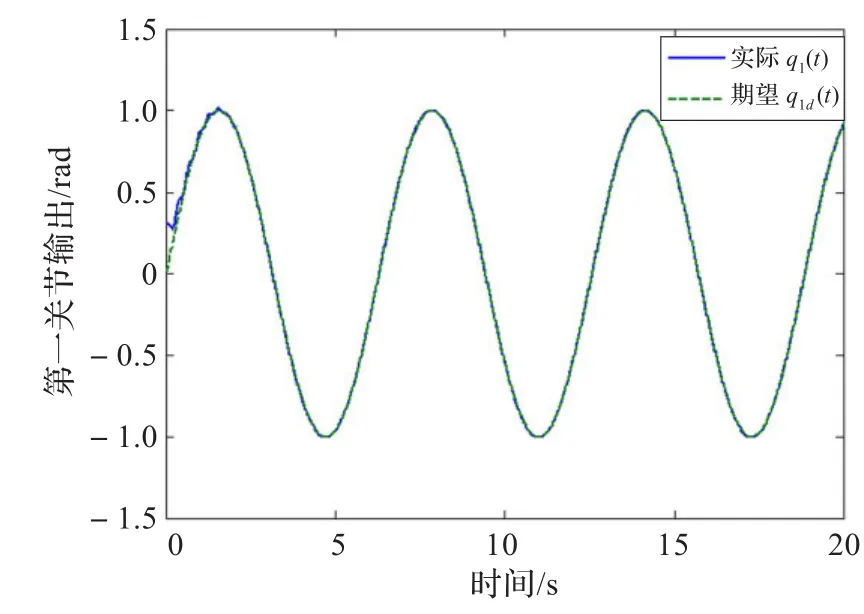
圖4 第一關(guān)節(jié)的輸出q1(t)與參考輸出q1d(t)

圖5 第二關(guān)節(jié)的輸出q2(t)與參考輸出q2d(t)
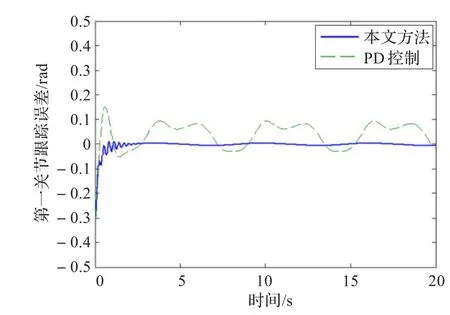
圖6 第一關(guān)節(jié)的輸出誤差e1(t)
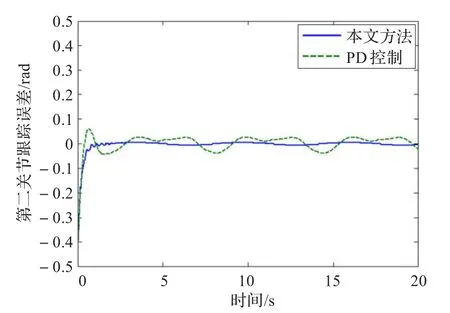
圖7 第二關(guān)節(jié)的輸出誤差e2(t)
6 結(jié)束語
本文將Lagrangian支持向量機(jī)推廣應(yīng)用到回歸問題,并提出了基于梯度投影法的學(xué)習(xí)方法,與標(biāo)準(zhǔn)的SVM相比,LSVM具有更快的學(xué)習(xí)速度。進(jìn)而采用LSVR補(bǔ)償來實(shí)現(xiàn)對(duì)機(jī)械手的控制,由于補(bǔ)償誤差的存在,因此,在自適應(yīng)控制器的基礎(chǔ)上增加了一個(gè)魯棒控制器,使得控制系統(tǒng)具有了更好的跟蹤性能。對(duì)兩關(guān)節(jié)機(jī)械手的仿真結(jié)果表明本文的方法優(yōu)于傳統(tǒng)的PD控制。
[1]Craig J J.Introduction to robotics:mechanics and control[M].3rd ed.New Jersey:Pearson Prentice Hall,2005.
[2]Lewis F L,Liu K,Yesildirek A.Neural net robot controller with guaranteed tracking performance[J].IEEE Trans on Neural Networks,1995,6(3):703-715.
[3]Lewis F L,Yegildirek A,Liu K.Multilayer neural-net robot controller with guaranteed tracking performance[J].IEEE Trans on Neural Networks,1996,7(2):388-399.
[4]Byung K Y,Woon C H.Adaptive control of robot manipulator using fuzzy compensator[J].IEEE Trans on Fuzzy Systems,2000,8(2):186-199.
[5]Meddah D Y,Benallegue A.A stable neuro-adaptive controller for rigid robot manipulators[J].Journal of Intelligent and Robotic Systems,1997,20(2/4):181-193.
[6]Ge S S,Hang C C.Adaptive neural network control of robot manipulators in task space[J].IEEE Trans on Industrial Electronics,1997,44(6):746-752.
[7]劉涵,劉丁,任海鵬.基于最小二乘支持向量機(jī)的混沌控制[J].物理學(xué)報(bào),2005,55(9):4019-4025.
[8]Sun Zonghai,Sun Youxian,Yang Xuhua,et al.Sequential support vector machine control of nonlinearsystems by state feedback[C]//LNCS 3498:ISNN 2005.Berlin Heidelberg:Springer-Verlag,2005:7-14.
[9]沈曙光,王廣軍,陳紅.最小支持向量機(jī)在系統(tǒng)逆動(dòng)力學(xué)辨識(shí)與控制中的應(yīng)用[J].中國電機(jī)工程學(xué)報(bào),2008,28(5):85-89.
[10]Mahmoud T A.Adaptive control scheme based on the least squares support vector machine network[J].Int J Appl Math Comput Sci,2011,20(4):685-696.
[11]Vapnik V.Statistical learning theory[M].New York:John Wiley and Sons,1998.
[12]Cortes C,Vapnik V.Support vector networks[J].Machine Learning,1995,20(3):273-297.
[13]Cristianini N,Shawe-Taylor J.An introduction to support vector machines[M].Cambridge:Cambridge University Press,2000.
[14]Smola A J,Sch?lkopf B.On a kernel-based method for pattern recognition,regression,approximation,and operator inversion[R].1997.
[15]Mangasarian O L,Musicant D R.Lagrangian support vector machines[J].Journal of Machine Learning Research,2001,1:161-177.
[16]Mangasarian O L,Musicant D R.Successive overrelaxation for support vector machines[J].IEEE Transactions on Neural Networks,1999,10(5):1032-1037.
[17]Lee Y J,Hsieh W F,Huang C M.ε-SSVR:a smooth support vector machine forε-insensitive regression[J].IEEE Transactions on Knowledge and Date Engineering,2005,17(5):678-685.
[18]Sheng M,Chen Y,Dai Q.A novel Lagrangian support vector machine and application in the crane gear fault diagnosis system[J].Advances in Mechanical and ElectronicEngineering LectureNotesin ElectricalEngineering,2012,176:369-373.
[19]Hwang J P,Choi B,Hong I W,et al.Multiclass Lagrangian support vector machine[J].Neural Computing and Applications,2013,22(3/4):703-710.
[20]Shao Y,Chen W,Zhang J,et al.An efficient weighted Lagrangian twin supportvectormachineforimbalanced data classification[J].Pattern Recognition,2014,47(9):3158-3167.
[21]Xia Youshen,Wang Jun.A one-layer recurrent neural network forsupportvectormachinelearning[J].IEEE Transactions on Systems,Man,and Cybernetics,Part B:Cybernetics,2004,34(2):1261-1269.
[22]Bertsekas D P,Tsitsiklis J N.Parallel and distributed computation:numericalmethods[M].Englewood Cliffs,NJ:Prentice-Hall,1989:210-219.
[23]Bertsekas D P.Nonlinear programming[M].Massachusetts:Athena Scientific,1999:234-250.
猜你喜歡
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
制造技術(shù)與機(jī)床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
鐵道通信信號(hào)(2018年5期)2018-06-28 03:06:24
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
知識(shí)經(jīng)濟(jì)·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(shù)(2016年6期)2016-04-20 06:21:32
