基于擴展卡爾曼濾波的全球導航衛星系統矢量跟蹤建模與仿真
2015-02-28 11:34:16曾廣裕申強李東光何新
兵工學報 2015年3期
曾廣裕,申強,李東光,何新
(1.北京理工大學 機電工程與控制國家級重點實驗室,北京100081;2.中國兵器工業信息中心,北京100089)
0 引言
全球導航衛星系統(GNSS)衛星定位接收機信號跟蹤的目的,是使接收機復制的本地載波及偽碼信號與接收到的衛星載波及偽碼相位保持一致,以剝離接收信號中的載波及偽碼信息[1]。一般衛星定位接收機采取各自獨立的跟蹤通道,對于不同跟蹤通道分別設置有各自獨立的載波跟蹤及偽碼跟蹤環,并將各通道獲取的偽距及偽距率等觀測信息輸出給導航解算模塊,通過解算偽距方程獲取接收機位置、速度等信息,然而,一般接收機設計方案中忽略了衛星與接收機間的運動共性信息,因此也存在接收機動態冗余性能有限,且信號重跟時間長等不足[2]。基于該原則,早在20 世紀80年代,由Spilker 等[2]首次提出了“矢量跟蹤”的概念,與此對應的,將一般接收機跟蹤環路稱為“標量跟蹤”。
GNSS 矢量跟蹤算法綜合了各衛星與接收機位置狀態相互關系,通過建立以接收機位置、速度、加速度、鐘差及鐘漂等誤差量為狀態量的擴展卡爾曼濾波(EKF)模型,并通過矢量延遲/頻率鎖定環(VDFLL)完成偽距、偽距率測量及環路控制。文獻[3 -6]分析了VDFLL 在弱信號及信號遮擋環境下接收機快速重跟蹤性能;文獻[7 -10]對比了矢量跟蹤算法與標量跟蹤算法優缺點,并重點研究了兩種不同跟蹤算法熱噪聲特性及對信號檢測閾值的改善情況;文獻[11 -12]分析了矢量跟蹤在抗干擾方面的優勢;文獻[13]提出了一種基于矢量跟蹤算法在異步偽衛星中的應用,不僅克服了偽衛星遠近問題,同時提高了接收機定位性能;文獻[14]單獨對矢量碼環VDFLL 跟蹤性能進行研究。盡管如此,各文獻對矢量VDFLL 跟蹤具體濾波跟蹤控制過程缺乏詳細分析,為此,本文給出了VDFLL 的基本結構與系統模型,對觀測量的線性化進行推導;重點分析了VDFLL 濾波跟蹤原理,并給出具體時序設計方案,同時針對VDFLL 無法實現對載波相位鎖定等問題,提出了一種串聯式鎖相環(PLL)電文解調模型;最后建立了基于軟件接收機的VDFLL 跟蹤模型,使用GNSS7700 衛星信號模擬器生成的一組彈丸飛行動態場景數據進行了半實物仿真實驗,驗證了上述方法的正確性。
1 矢量VDFLL 結構及EKF 模型
1.1 矢量VDFLL 結構
標量接收機基帶信號處理過程中,對于不同通道分別設置有獨立的載波跟蹤環及偽碼跟蹤環。接收到的衛星信號經射頻下變頻至中頻后,分別與不同通道接收機本地生成的載波頻率及偽碼相位進行混頻,并將混頻后積分累加值進行鑒相,獲取載波及偽碼相位誤差信息,也即偽距及偽距率誤差等信息,并將獲取到的偽距、偽距率殘差信息經環路濾波器后轉換為本地載波數控振蕩器(NCO)及偽碼NCO 調整控制量,實現對環路的閉環控制。導航解算過程同樣獨立于通道處理模型,將獲取到的不同通道測量得到的偽距、偽距率等信息,通過解偽距方程方式完成對接收機位置、速度等信息的確定。
VDFLL 綜合利用了各通道衛星偽碼相位及載波頻率等信息,建立以接收機位置、速度、加速度及時鐘等信息的EKF 模型,將不同時刻衛星位置狀態信息與接收機位置狀態信息進行深度融合,VDFLL 算法實現主要基于兩個基本原則:首先,偽碼相位變化基于接收機位置的改變;其次,載波多普勒頻移基于接收機速度的變化[3]。為此,若接收機能獲取精確星歷信息,精確估算出不同時刻星空衛星運動特性,則通過偽碼及載波鑒別器獲取得到的偽距及偽距率偏差信息經EKF 后將得到用戶的位置、速度、時鐘偏移及時鐘飄移等參數。圖1為基于位置信息的矢量VDFLL 原理框圖,其中IP、QP、IE、QE、IL、QL分別代表I、Q 支路即時、超前、滯后通道累加值。
矢量VDFLL 具有與標量接收機相類似的通道處理環節,其不同之處在于,矢量VDFLL 不同通道載波NCO 及偽碼NCO 調整控制量生成不再獨立,而是通過EKF 估算接收機不同時刻位置、速度等變化規律,接收機位置、速度等信息的變化體現為測量得到信號偽距Δρ、偽距率Δρ·的變化,而偽距及偽距率的改變反映著接收到的偽碼相位及載波多普勒的變化。正因如此,矢量接收機跟蹤方案有著較標量接收機更多潛在的優勢[3]:第一,EKF 能權衡各通道偽碼相位及載波頻率誤差值,通過實時檢測不同通道噪聲特性,EKF 能提供最優的接收機位置、速度等狀態信息,具有更高的動態性能;第二,矢量跟蹤過程中,由于綜合了各通道衛星信息,接收機能跟蹤更為微弱的信號;第三,VDFLL 具有快速重跟蹤信號的潛能。

圖1 矢量VDFLL 原理框圖Fig.1 Schematic diagram of VDFLL
1.2 EKF 狀態模型
矢量VDFLL 跟蹤算法以接收機位置、速度、加速度、接收機鐘差、鐘漂等信息為狀態量,EKF估計的是狀態量誤差而非狀態量本身,并且用估計的狀態量誤差信息校正導航輸出[7]。定義狀態量誤差值,其中,前面9 項分別是估計的接收機位置、速度、加速度在地心地固(ECEF)坐標系下的誤差值,后兩項分別代表估計的接收機鐘差及鐘漂誤差值。狀態向量的選取可根據實際應用接收機動態需求選定,對于低動態場景,可忽略接收機自身加速度等信息的干擾,從而降低狀態量維數,降低濾波器設計難度。由牛頓運動學規律,系統狀態轉移方程可表示為

即Xe,k+1=FXe,k+Wk,式中:T 為卡爾曼濾波更新時間;Wk為均值為0,協方差為Q 的過程噪聲。
1.3 線性化量測方程
圖1所示的矢量VDFLL 設計框圖中,每次EKF 更新時刻,不同通道偽碼相位及載波頻率誤差信息將被檢測,偽碼相位及載波頻率誤差信息將反映出不同時刻接收機位置、速度、加速度及時鐘等信息的變化,且呈非線性關系,分析觀測量的線性化過程對理解矢量VDFLL 濾波控制機理具有重要指導意義。
設k 時刻接收機位置、速度可表示為當前時刻估計值加誤差值,如(2)式所示:
偽距方程如(3)式所示[1]:

式中:ρ(i)c為修正后i 號星偽距;c 為光速;δtu為接收機時鐘誤差;ηi為噪聲項。

由此,得到偽距殘差與狀態量關系:

式中:ax,i、ay,i、az,i為接收機相對衛星視線方向LOS 單位矢量。
同樣,對于第i 衛星,接收到的信號載波頻率fik(單位:Hz)可表示為

式中:fT為信號發射頻率;vi為衛星速度;u·k為k 時刻接收機速度;本地時鐘偏移;ξi為噪聲項。為此,本地接收信號與輸入載波頻率誤差可表示為


式中:接收到的信號載波頻率fik又可表示為k 時刻估計載波頻率加頻率誤差:

將(2)式、(8)式代入(7)式得:

將線性化后的第i 號衛星觀測方程(5)式,(9)式寫成矩陣形式:
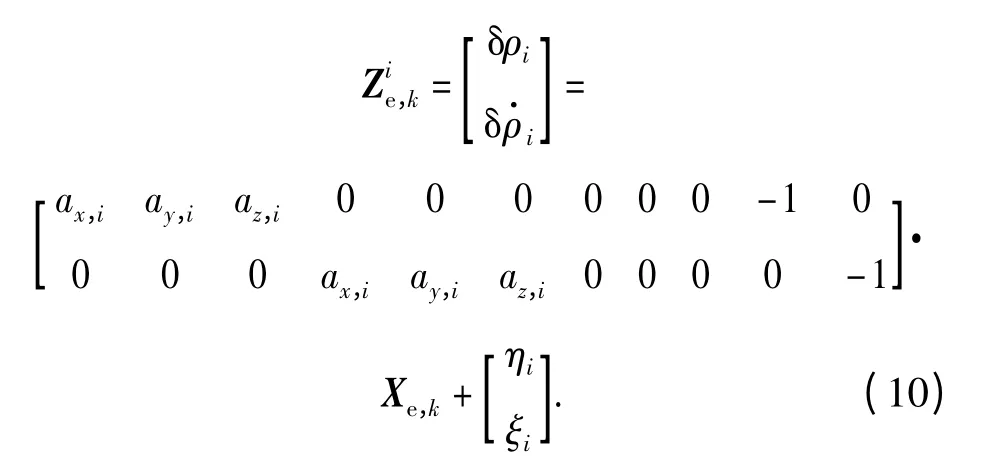
矢量VDFLL 中,最少需同時跟蹤4 顆或者4 顆以上通道衛星,基于EKF 算法才能準確估算出不同時刻的狀態誤差量,為此,對于多通道輸入時,量測方程可表示為

式中:Vk為均值為0,協方差為R 的測量高斯白噪聲,測量噪聲協方差統計值不僅與偽碼相位及載波頻率鑒別器類型有關,同時也與信號強度有關[9]。文獻[9,15]分別介紹了歸一化超前減滯后功率法及超前減滯后功率法偽碼鑒相策略、四象限反正切及叉積鑒頻等不同鑒別器下測量噪聲協方差R 的統計求解方法。圖2為不同鑒別器測量噪聲統計特性隨載噪比變化規律。由圖2可知,測量噪聲協方差R 的大小與載噪比呈近似指數關系變化。由于測量噪聲R 中包含了接收機各通道的偽碼誤差及載波頻率誤差噪聲項,假設各通道的碼相位誤差以及載波頻率誤差間不相關,則R 為對角陣,其對角線元素大小與實際接收到的信號強度有關,當衛星信號受到干擾或者遮擋時,實際的噪聲項會發生較大的變化,為此,矢量VDFLL 跟蹤處理中,為提高接收機抗干擾性能及濾波性能,須實時估算出不同時刻接收信號噪聲特性并調整R 的變化[16]。

圖2 不同鑒別器測量噪聲協方差與載噪比關系Fig.2 Relationship between measurement noise covariance and C/NO of different discriminators
2 矢量VDFLL 濾波跟蹤時序分析
矢量跟蹤的基本原理是利用碼相位和載波頻率的預測誤差直接修正用戶的位置、速度、時間,修正后的用戶位置、速度、時間反饋給本地復制信號生成器,生成新的碼相位和載波頻率的預測值,從而形成閉合的矢量跟蹤環路[17],該算法核心為基于狀態量誤差的EKF 跟蹤控制時序設計。如圖3所示,設X為代表接收機位置、速度、加速度、鐘差及鐘漂等狀態向量,Xe為狀態量誤差向量,其中,位置單位為m,速度單位為m/s,加速度單位為m/s2,接收機鐘差及鐘漂需轉換為位置及速度信息,單位分別為m及m/s. 圖3中,下標k 代表第k 次更新歷元,代表第k 次更新歷元時刻狀態量先驗及后驗估計值。矢量VDFLL 中,每隔Δt 時刻(如20 ms)完成對接收機位置、速度、加速度等參數的預估,并調整NCO,接收機狀態估計更新時間t 可大于測量更新時間Δt,通常取20 ms 至1 s 間,具體根據接收機動態應力及噪聲特性而定。


圖3 VDFLL 跟蹤算法時間更新示意圖Fig.3 Time update for VDFLL algorithm
由于EKF 每隔t 時間更新一次狀態量,每次EKF 更新后,重新復位狀態量誤差Xe,k,為此,k +1時刻狀態向量誤差估計值可表示為

式中:Xk+1為k +1 時刻狀態向量真實值為k +1時刻狀態向量估計值。
圖4為VDFLL 跟蹤算法濾波跟蹤控制原理框圖。矢量VDFLL 跟蹤過程中,EKF 是對輸入信號與本地生成信號誤差偏差量進行濾波,為此,圖4中,虛線框內為對狀態誤差量的EKF 濾波過程,虛線框外為狀態量的預測與更新及NCO 調整控制。其中:Zk+1為k+1 時刻接收機接收到的真實偽距及偽距率等參數,為k 時刻本地預估的偽距及偽距率參數;Ze,k+1代表k+1 時刻真實偽距及偽距率與接收機本地生成的偽距、偽距率偏差值,實際應用中,該偏差值由偽碼及載波鑒別器獲取。

式中:Vk為均值為0,協方差為R 的測量高斯白噪聲。
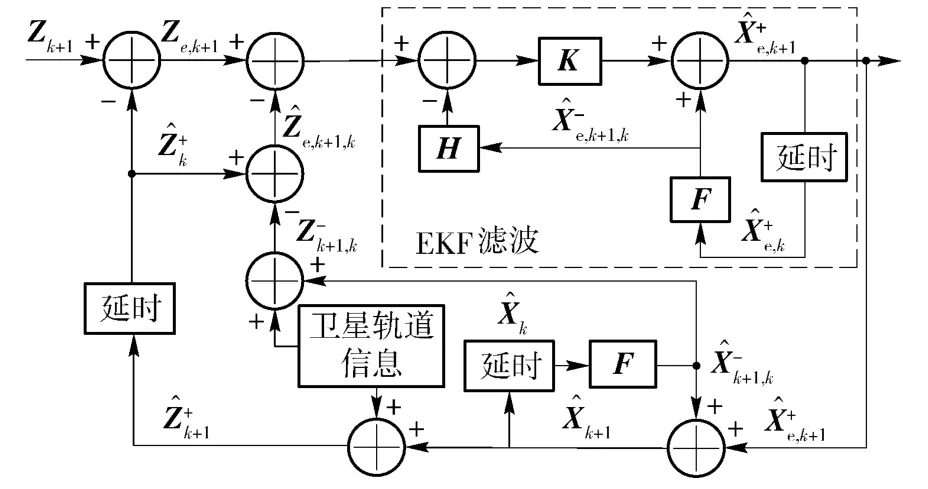
圖4 VDFLL 跟蹤算法EKF 濾波跟蹤控制框圖Fig.4 EKF filter control loop of VDFLL tracking
控制過程分兩部分:一路為誤差狀態量的EKF濾波過程;另一部分為狀態量更新,狀態量更新在每次EKF 循環外進行。具體濾波跟蹤控制時序如圖5所示。
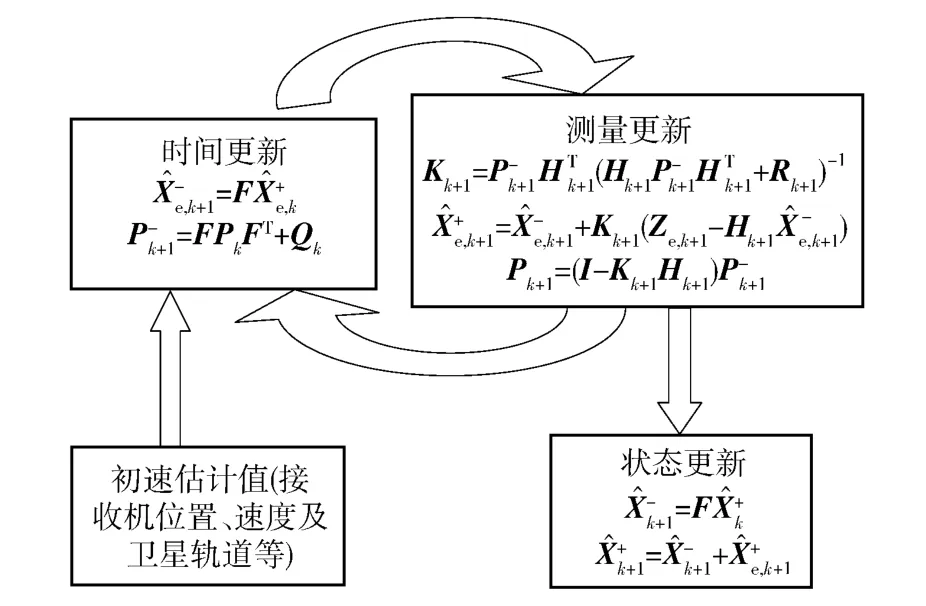
圖5 VDFLL 濾波跟蹤控制時序圖Fig.5 Filter tracking process of VDFLL
矢量VDFLL 跟蹤過程中,雖然EKF 濾波過程狀態量為接收機位置、速度、加速度及時鐘等偏差量,但矢量跟蹤前,仍需要獲取一定精度的接收機初始位置、速度等信息,否則,若獲取到的本地偽碼相位與接收信號偽碼相位偏差過大(大于半個偽碼長度),將超出偽碼鑒別器牽入范圍,致使跟蹤環路發散。該初始估計值不僅可通過標量接收機引導獲取,同時也可以通過外部數據裝定等方式實現。
3 串聯式PLL 電文解調模型
矢量VDFLL 只通過矢量頻率鎖定環(VFLL)實現了載波頻率的跟蹤,但仍無法完成對載波相位的完全解調,為此,單純的矢量VDFLL 跟蹤算法無法實現對導航電文的解調,信號解調過程中,即時支路存在明顯的載波相位殘差影響。
針對此類問題,結合文獻[18],提出一種基于串聯式PLL 電文解調模型,如圖6所示。對于不同通道,分別設置有獨立的串聯式PLL 跟蹤環,用以跟蹤矢量VDFLL 載波頻率殘差,該設計方案優點有:1)對于不同通道分別設置有獨立的串聯式PLL跟蹤環,不存在通道間信號串擾現象;2)串聯式PLL只跟蹤矢量VDFLL 輸出的頻率殘差部分,該模塊的正常與否并不影響矢量VDFLL 原有的性能,同時實現了對各通道載波相位的跟蹤,完成對導航電文的解調。
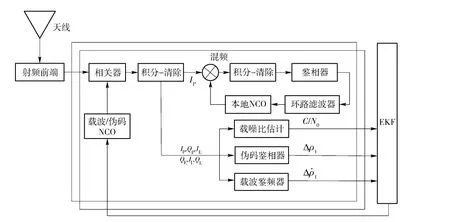
圖6 串聯式PLL 電文解調模型Fig.6 Series PLL message demodulation model
文獻[1]已對此類鎖相環參數設計及數字離散過程作了詳細描述,不同之處為,本文采取串聯式PLL 實現的是對矢量頻率跟蹤后載波殘余頻率/相位誤差的跟蹤,為低頻信號,為此,圖6中,本地NCO 無須單獨增加NCO 偏置,直接利用環路濾波器輸出的NCO 調整量即可實現對環路的鎖定。
本文提出的串聯式PLL 跟蹤模塊為可選擇的,對于矢量VDFLL,載波相位的鎖定與否并不影響其對接收機位置狀態信息的最優估計,增加串聯PLL目的是為了實現對導航電文的正確解調,以彌補矢量跟蹤環路本身無法獲取導航信息的不足。
4 半實物仿真驗證
半實物仿真的目的一方面用以驗證所建立的矢量VDFLL 跟蹤控制模型的正確性,另一方面分析驗證矢量跟蹤算法對動態信號跟蹤性能。實驗數據由GNSS7700 Spirent 模擬器生成一組初速為930 m/s;最大加速度為50 m/s2的彈道飛行場景,如圖7所示,各通道衛星信息如表1所示。

圖7 實驗場景Fig.7 Test scenario

表1 衛星信息Tab.1 Satellite information
矢量跟蹤算法以Matlab 軟件接收機為平臺[19],將模擬器輸出的動態場景衛星信號經NS210B 衛星中頻采集器采集并轉換為軟件接收機可識別的二進制數據源。NS210B 中頻采集器輸出中頻4.1239 MHz,采樣頻率16.368 MHz. 矢量VDFLL 跟蹤前,先經標量跟蹤獲取矢量VDFLL 相關初始值,如不同衛星信號發射時間、接收機初始位置等信息。矢量VDFLL 跟蹤過程中,通過實時解算星歷方式獲取不同時刻衛星軌道參數。圖8為由標量轉入VDFLL 跟蹤時刻,標量跟蹤獲取到的星空可視衛星分布效果圖,與模擬器生成場景相吻合。仿真過程中,以6 通道VDFLL為例,任意選取6 顆可用衛星,如1、8、9、17、24、28 號衛星,EKF 更新率為20 ms.
矢量VDFLL 跟蹤過程中,選取歸一化超前減滯后功率法偽碼鑒相策略及叉積鑒頻策略實現對輸入信號與本地生成偽碼及載波信號相位與頻率偏差估計。測量噪聲協方差R 參考文獻[9,15],過程噪聲Q 中包含接收機位置、速度、加速度及時鐘誤差相關
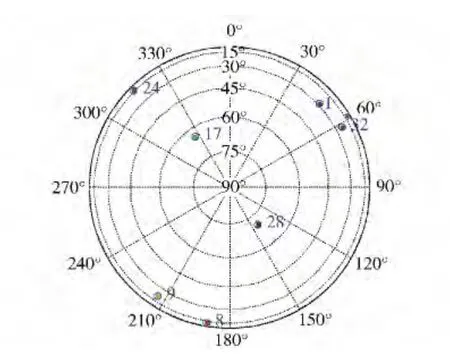
圖8 可視衛星分布圖Fig.8 Visible satellite distribution

圖9 為VDFLL 跟蹤24 號星估算得到的偽距、

圖9 24 號星跟蹤效果Fig.9 Tracking result of 24
噪聲,這些項可以通過接收機運動狀態,本地時鐘精度等先驗信息進行預設。仿真過程中,Q 設置如下:偽距率及載噪比估計與模擬器真實輸出信號對比情況(其余通道類似)。圖9(a)~圖9(c)分別為:EKF 估算得到的偽距率與模擬器真實輸出偽距率對比情況;EKF 估算得到的偽距與模擬器真實輸出偽距對比情況;實時載噪比估算與模擬器真實輸出載噪比對比情況。由圖9可知,矢量VDFLL 跟蹤過程中不僅能正確預估出不同時刻衛星相對接收機間偽距及偽距率的變化規律,同時,估算載噪比與模擬器輸出基本吻合。
圖10 為增加串聯式PLL 與否對電文解調效果圖。圖10 中,圖10(a)圖為未增加串聯PLL 電文解調效果,由此可見,單純的VDFLL 并不能實現對載波相位的解調,即時支路中存在明顯的相位殘差;圖10(b)為增加串聯PLL 后即時支路電文提取效果,對比圖10(a)與圖10(b)兩圖可知,矢量VDFLL跟蹤過程中,增加串聯PLL 能較好地實現對載波殘差的鎖定,并正確提取出電文信息。
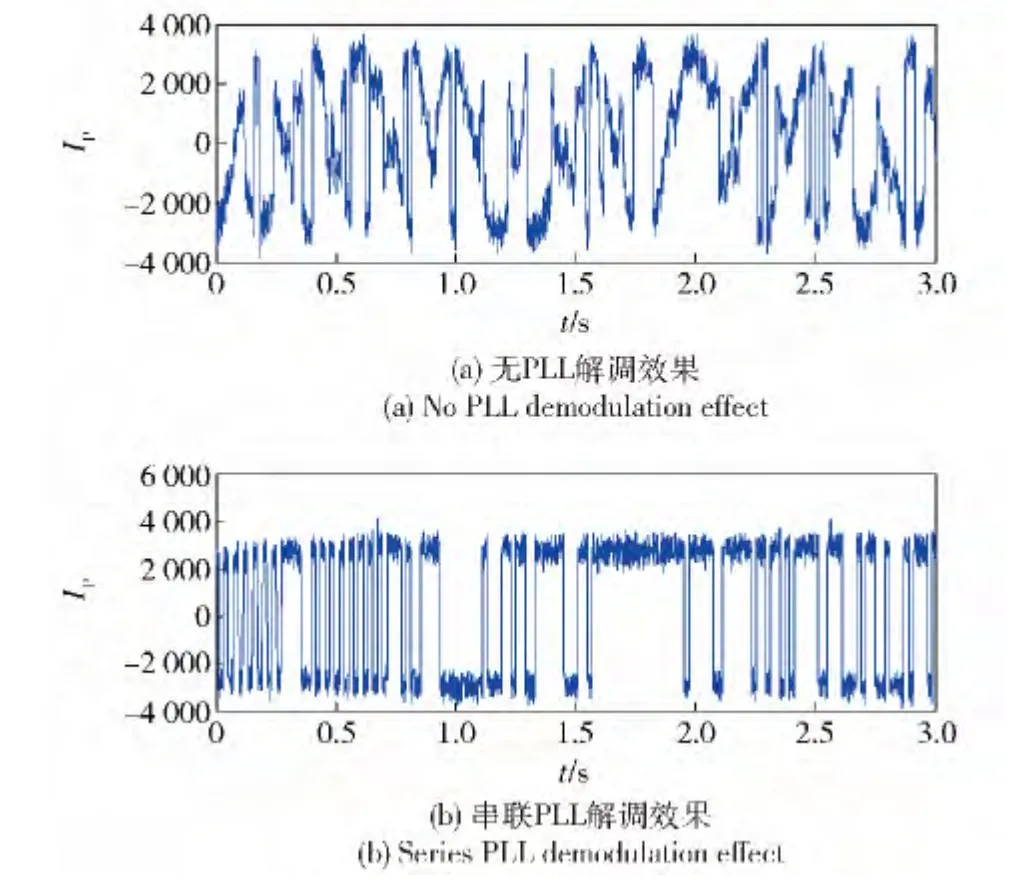
圖10 串聯式PLL 電文解調效果Fig.10 Result of series PLL message demodulation
圖11 和圖12 分別為矢量VDFLL 在發射坐標系下檢測得到的彈道位置、速度信息及其誤差變化規律。發射坐標系定義為以炮位原點為坐標原點O,xf軸在發射點水平面內,并指向目標點,yf軸垂直發射點水平面指向上方,zf軸與Oxfyf平面垂直構成右手坐標系,發射坐標系常用于分析彈丸相對地面的運動情況。由圖11、圖12 可知,矢量VDFLL 跟蹤算法不僅能正確地實現對彈丸飛行位置及速度的實時檢測且位置檢測均方誤差(1σ)為8.5 m,速度檢測均方誤差(1σ)為0.3 m/s,同時具有良好的動態跟蹤特性。
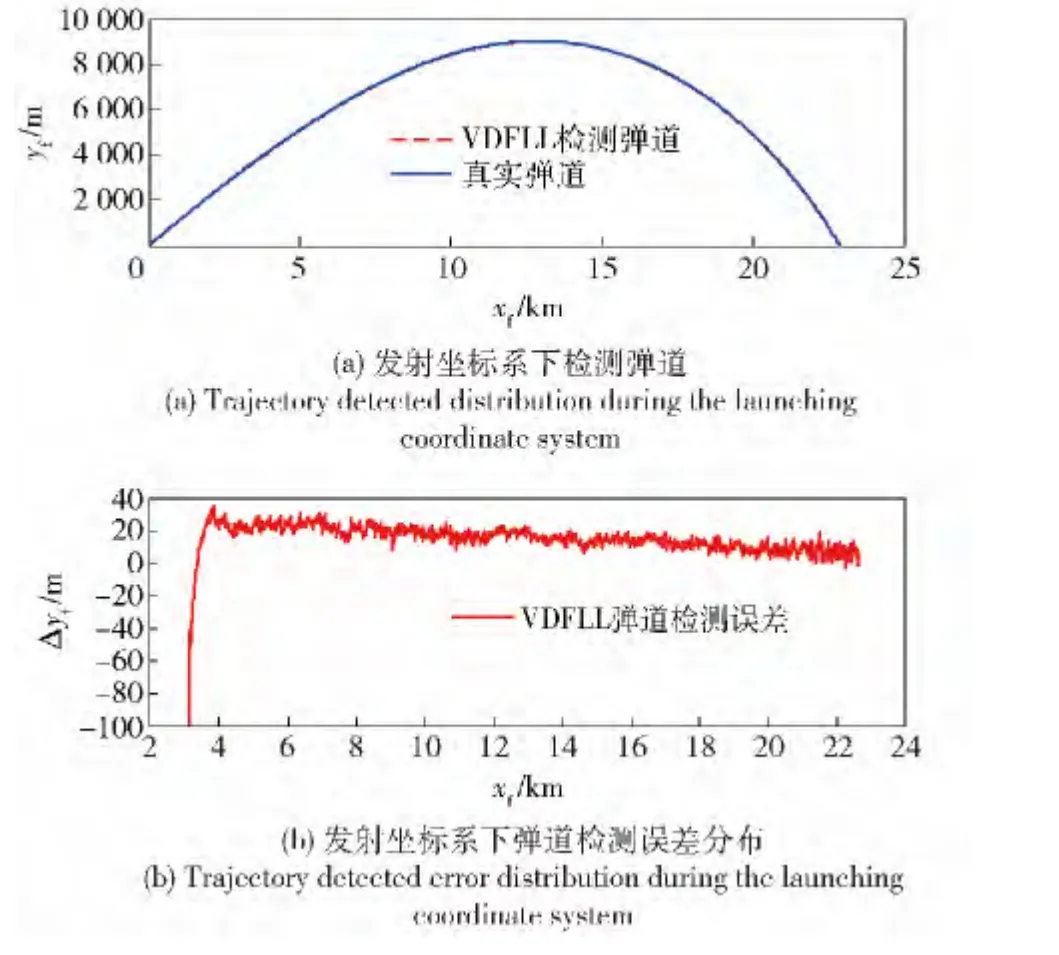
圖11 VDFLL 位置估計Fig.11 Position estimation of VDFLL

圖12 VDFLL 速度估計Fig.12 Velocity estimation of VDFLL
5 結論
本文研究了基于EKF 的矢量VDFLL 接收機跟蹤算法的結構、模型并重點分析了矢量VDFLL 濾波跟蹤控制過程;同時針對VDFLL 跟蹤算法無法實現對載波相位的鎖定,提出一種串聯式PLL 電文解調模型;最后建立了以軟件接收機為平臺VDFLL 跟蹤模型,并進行了半實物仿真驗證。半實物仿真不僅驗證了所建VDFLL 控制模型的正確性,同時進一步驗證了矢量跟蹤算法具有良好的動態跟蹤性能。
References)
[1]Kaplan E. Understanding GPS:principles and application [M].Boston,MA:Artech House,1990.
[2]Spilker J J.Vector delay lock loop processing of radiolocation transmitter signals:US 5398034[P],1995-03-14.
[3]Matthew L,David M.Comparison of traditional tracking loops andvector based tracking loops for weak GPS signals[C]∥ION GNSS 20th International Technical Meeting of the Satellite Division.Fort Worth,TX:Institute of Navigation,2007:789 -795.
[4]Pany T,Eissfeller B. Use of a vector delay lock loop receiverfor GNSS signal power analysis in bad signal conditions[C]∥Proceedings of the IEEE-ION PLANS. San Diego,CA:IEEE,2006:893 -903.
[5]Kanwal N,Hurskainen H,Nurmi J. Vector tracking loop design for degraded signal environment[C]∥Ubiquitous Positioning Indoor Navigationand Location Based Service(UPINLBS),Kirkkonummi,Finland:IEEE,2010:1 -4.
[6]Kwang-Hoon K,Gyu-In J,Sung-Hyuck I. Adaptive vector-tracking loop for low-quality GPS signals[J].International Journal of Control,Automation,and Systems,2011,9(4):709 -715.
[7]Matthew L,David M.Vector delay/frequency lock loop implementation and analysis[C]∥International Technical Meeting,Anaheim,California:Institute of Navigation,2009.
[8]Matthew L,David M,Hung J Y.A valid comparison of vector and scalar tracking loops[C]∥Proceedings of IEEE/ION Position,Location and Navigation Symposium Conference. South Carolina,US:IEEE,2010:464 -474
[9]Lashley M,Bevly D M. Analysis of discriminator based vector tracking algorithms[C]∥Proceedings of the 2007 National Technical Meeting of the Institute of Navigation,San Diego,CA:Institute of Navigation,2007:570 -576.
[10]Lashley M,Bevly D M,et al. What are vector tracking loops and what are their benefits and drawbacks[J]. GNSS Solution Column,2006,4:16 -21.
[11]Benson D. Interference benefits of a vector delay lock loop(VDLL)GPS receiver[C]∥Proceedings of the 63rd Annual Meeting of the Institute of Navigation. Cambridge,MA:IEEE/ION,2007:749 -756.
[12]王偉,李強,徐定杰,等.一種矢量跟蹤環路及其抗干擾性能分析[J].電子與信息學報,2013,35(7):1581 -1586.WANG Wei,LI Qiang,XU Ding-jie,et al. Adesign method and anti-jamming performance analysis for vector tracking loop[J].Journal of Electronics & Information Technology.2013,35(7):1581 -1586.(in Chinese)
[13]So H G,Lee T J,Jeon S H,et al. Implementation of a vector based tracking loop receiver in a pseudolite navigation system[J]. Sensors,2010,10(7):6324 -6346.
[14]Lira D W,Kang H W,Hwang D H,et al.Performance analysis of vector delay lock loop[C]∥ICROS-SICE International Joint Conference. Fukuoka,Japan:IEEE,2009:5046 -5049.
[15]羅雨,王永慶,羅海坤,等. 基于擴展卡爾曼濾波器的矢量跟蹤算法研究[J].電子與信息學報,2013,35(6):1400 -1405.LUO Yu,WANG Yong-qing,LUO Hai-kun,et al.Study on vector tracking loop based on extended Kalman filter[J]. Journal of Electronics & Information Technology,2013,35(6):1400 -1405.(in Chinese)
[16]趙思浩,陸明泉,馮振明.基于自適應卡爾曼濾波的GNSS 矢量鎖定環路[J].哈爾濱工業大學學報,2012,44(7):139 -143.ZHAO Si-hao,LU Ming-quan,FENG Zhen-ming. GNSS vector lock loop based on adaptive Kalman filter[J]. Journal of Harbin Institute of Technology,2012,44(7):139 -143. (in Chinese)
[17]朱珍珍,湯廣富,程翥,等.基于矢量延遲鎖定環路的GPS 信號跟蹤算法[J].自然科學進展,2009,19(9):1021 -1028.ZHU Zhen-zhen,TANG Guang-fu,CHENG Zhu,et al. EKF based vector delay lock loop algorithm for GPS signal tracking[J]. Progress in Natural Science,2009,19(9):1021 -1028.(in Chinese)
[18]韓孟飛,王永慶,吳嗣亮,等.一種串聯結構數字載波環及其Z域噪聲性能分析[J].電子學報,2013,41(2),307 -313.HAN Meng-fei,WANG Yong-qing,WU Si-liang,et al. A series connection structure digital carrier tracking loop and analysis of its noise performance in Z domain[J].Acta Electronica Sinnica,2013,41(2):307 -313. (in Chinese)
[19]James Bao-Yen Tsui. Fundamentals of global positioning system receivers:a software approach[M]. 2nd,ed. New York,US:Publishing House of Electronics Industry,2007:193 -217.
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
中國生殖健康(2019年3期)2019-02-01 06:12:26
中華手工(2017年2期)2017-06-06 23:00:31
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
海軍航空大學學報(2015年3期)2015-11-11 17:20:00
中外會展(2014年4期)2014-11-27 07:46:46
環球時報(2010-02-11)2010-02-11 13:34:15
建筑創作(2001年3期)2001-08-22 18:48:14
祝您健康(1987年3期)1987-12-30 09:52:32