防空導彈毀傷目標六自由度建模研究
2015-03-04 05:30:30范利軍
彈箭與制導學報 2015年6期
劉 恒,胡 錚,范利軍
(63981部隊,武漢 430300)
?
防空導彈毀傷目標六自由度建模研究
劉 恒,胡 錚,范利軍
(63981部隊,武漢 430300)
防空導彈毀傷目標的性能不斷增強,傳統基于質點的空中目標模型不能很真實的體現目標各項性能,跟蹤效果不理想。針對這個問題提出一種基于剛體的六自由度模型。這種模型不僅具有三維的位置信息,還有三維的姿態變化信息,并根據空中目標的特點簡化計算。仿真結果顯示,這種方法有更高的跟蹤精度和穩定性,且不易丟失目標,并能更好的體現目標各方面狀態。
防空導彈;空中目標;剛體建模;目標跟蹤;六自由度
0 引言
隨著防空導彈所需要對付的空中目標復雜性和機動性不斷增強[1],基于質點的跟蹤控制(把目標視為只有三維平移運動的質點,不存在自身姿態變化)[2]已經不能很好達到控制效果。現實中的目標除三維平移運動以外,兼有3個姿態角的轉動。基于剛體的跟蹤控制可以實現精確穩定的跟蹤目標,更為貼近真實情況。
建立模型的兩個基本點是精確性和實用性[3],考慮控制目標的坐標位置和自身姿態六個自由度,精確性大幅度增強,但是會使系統復雜化,冗長的計算會降低跟蹤控制的實時性,即實用性降低[4]。文中在結合這兩方面的基礎上,探索飛行目標六自由度精確模型的建立,簡化計算的同時提升系統實用性。
1 坐標系定義
對于位置坐標來說,采用常用的慣性坐標系(inertial coordinate system)[5],即適用牛頓運動定律,坐標原點固定于大地,3個坐標軸(X,Y,Z)相互垂直,記為[x,y,z]T。
慣性坐標系規定了空中目標的位置信息,即3個自由度,而自身的姿態3個自由度利用體坐標系規定,如圖1所示。3個坐標軸(Xb,Yb,Zb)相互垂直,θ、ψ和φ分別為俯仰角、偏航角和滾轉角[6],(ibx,iby,ibz)為坐標單位向量。
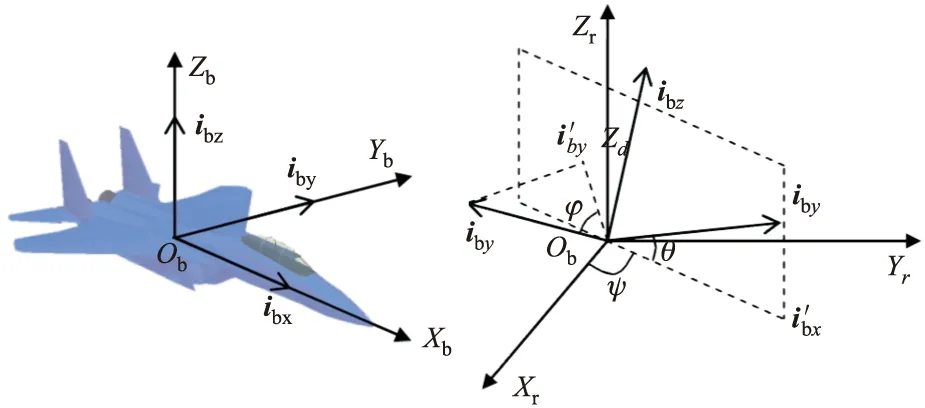
圖1 空中目標體坐標系
2 空中目標的位置運動
空中目標的位置運動主要取決于作用于其上的合力f,其合力一般可分解為自身重力、發動機推力和空氣動力[7]。
重力通常為固定值,記為G,垂直指向地心。
發動機推力矢量為W,為簡化模型,定為始終固定于體坐標軸,與Xb同向。
空氣動力記為fw,且有:
(1)
式中:D、C和E分別為空氣的阻力、側力和升力;CD、CC和CE為其無量綱系數;ρ為空氣密度;v是目標速度;S為目標參考面積。
根據空中目標側滑角小等特點[8],簡化合力方程,在慣性坐標系上進行描述:
f=(Pbi)-1(Wib+Pbwaw)=
(2)
式中:α和β分別為空中目標的迎角和側滑角,Pbi和Pbw為變換矩陣[9],且有:
3 空中目標的姿態運動
空中目標自身的姿態運動除外部影響外,主要是由本身的副翼控制,即由控制者的控制意圖變換的,具有一定的智能性,不能用數學模型進行精確建模。結合模糊理論,簡化模型,將空中目標姿態變化固定為3個模式:
A)勻速等高直線飛行
即空中目標控制者保持現有狀態飛行。
B)縱向運動
即空中目標爬升或俯沖,俯仰角變化,偏航角和滾轉角保持不變。
C)轉彎運動
即空中目標協調轉彎,俯仰角、偏航角和滾轉角均有變化,且滿足條件:側滑角約為0,外部合力沿ibz方向[10]。
各模式下姿態角變化情況如表1所示。
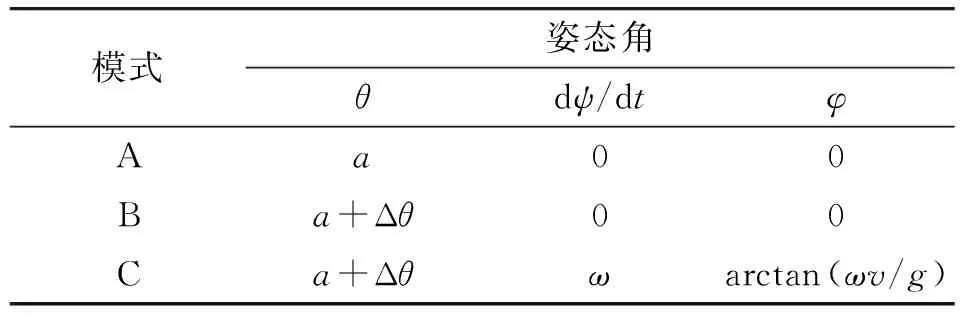
表1 各模式姿態角
結合空中目標所受外力,有:
Ecosφ=mg
(3)
Esinφ=mωv
(4)
gtanφ=ωv?φ=arctan (ωv/g)
(5)
4 空中目標的綜合運動
對目標在第k時刻的狀態Xk建模,且有:
Xk=G(xk,yk,zk,vk,ψk,θk,φk,χ,ξk,ωk,Δθk,Tk)
(6)
其中:G是作用函數;vk是速度矢量;χ是空中目標類型參數;ξk為空中姿態變化模式(ξk∈{A,B,C});Tk是運行時間。在給定初始位置、姿態和速度條件下,變量{xk,yk,zk,vk,ψk,θk,φk}均為變量{χ,ξk,ω,Δθ,Tk}的函數,簡化計算。下一時刻的狀態Xk+1可以根據上一時刻狀態Xk進行遞推計算,其過程如圖2所示。
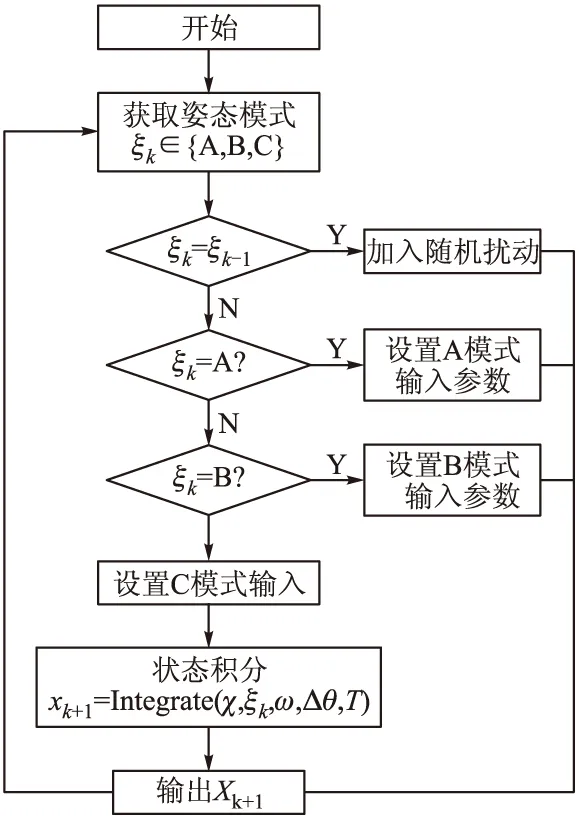
圖2 空中目標模型遞推流程
進行遞推計算前,確定控制目標的飛行狀態是否發生了變化。如果沒有變化,則加入一個小的擾動量。如果發生變化,則獲取控制者的輸入量,確定飛行模式,設定該模式參數,并進行狀態積分,在給定初始條件的基礎上利用控制者的輸入量(ωk,Δθk,Tk),同時確定變換矩陣Pbw,在計算合力f后計算速度與位移,最后計算姿態角。
5 仿真實驗
分別對基于質點和基于剛體的跟蹤控制方法進行仿真驗證。空中目標采用典型復合機動航行[11],3種姿態變換模式平滑連接,為了保證對兩種建模方法進行驗證,采用了傳統的跟蹤算法,未使用智能控制或卡爾曼濾波等,如圖3所示,給定初始條件,由A模式開始,后面每一階段的初始條件為上一階段的輸出。
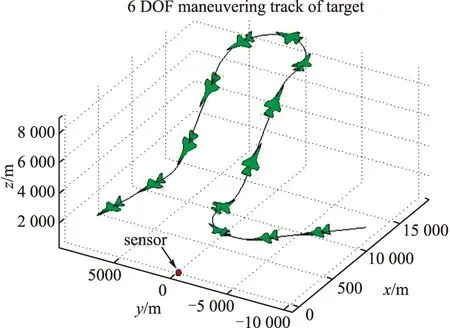
圖3 空中目標機動過程
分別對基于兩種模型的控制方法的位置跟蹤誤差和速度跟蹤誤差進行對比。
如圖4所示,圖4(a)為位置均方差比較,圖4(b)為速度均方差比較,無論空中目標在勻速飛行模式或機動轉彎模式下,基于剛體跟蹤方法的跟蹤效果明顯優于基于質點的跟蹤方法(同時間幅度值比較)。在3個坐標方向,基于剛體的跟蹤方法穩定性都很良好,峰值較小,在機動轉彎時不易丟失目標,對跟蹤精度和可靠性的提高非常明顯。
但是由于計算量的增加,根據軟件仿真結果顯示,執行時間大約為基于質點的跟蹤方法的600多倍,影響了該種方法的實時性,對跟蹤硬件、運算能力提出了更高的要求。
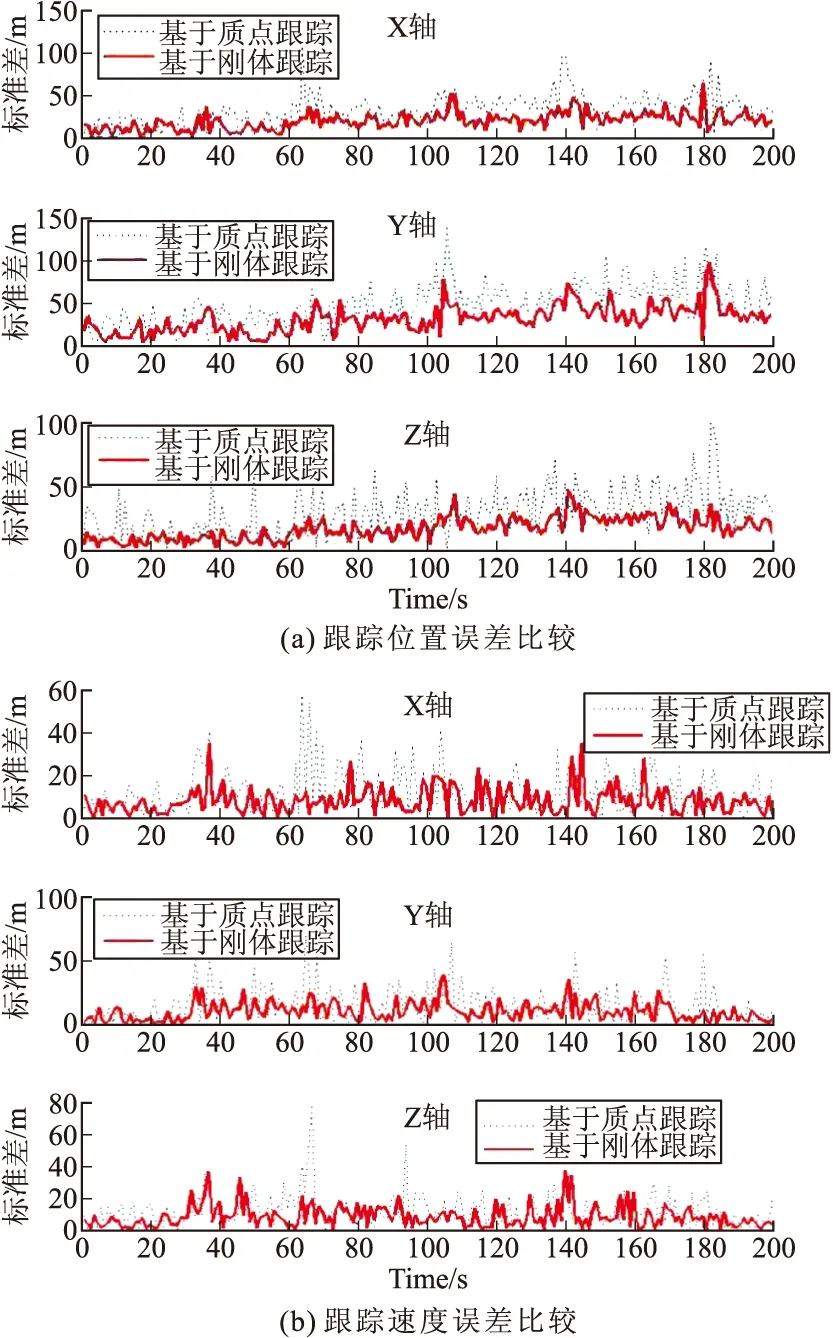
圖4 跟蹤均方差誤差比較
6 結束語
文中提出基于剛體的防空導彈毀傷目標的六自由度模型建立方法。通過仿真實驗對該跟蹤方法進行了分析與驗證,結果顯示,相較于傳統的基于質點的跟蹤方法,基于剛體模型具有更高的跟蹤精度和穩定性,特別在空中目標機動時,效果顯著。但由于考慮因素增多,計算量不可避免地增加,延長了執行時間,降低了實時性,成為了主要瓶頸,也是以后的研究方向。
[1] 董文洪, 姜文志, 栗飛. 防空導彈武器系統對目標群射擊效能分析 [J]. 現代防御技術, 2010, 38(2): 17-20.
[2] 陳良, 吳小俊, 王士同, 等. 一種新的常增益機動目標跟蹤方法:α-β-γ-δ模型 [J]. 系統仿真學報, 2008, 20(17): 4550-4554.
[3] 王力, 錢林方, 高強, 等. 隨動系統負載模擬器執行環節的建模研究 [J]. 南京理工大學學報, 2013, 37(4): 579-584.
[4] 周云鋒. 基于剛體運動模型的機動目標跟蹤算法研究 [D]. 石家莊: 軍械工程學院, 2009.
[5] 阮曉鋼, 侯旭陽, 龔道雄. 可重構旋翼無人飛行器的動力學建模與分析 [J]. 機器人, 2013, 35(2): 227-238.
[6] 楊陽, 崔金峰, 余毅. 三旋翼飛行器動力學分析及建模 [J]. 光學精密工程, 2013, 21(7): 1873-1880.
[7] 盛永智. 軌控直接力/氣動力復合控制攔截彈的自動駕駛儀設計 [J]. 現代防御技術, 2009, 37(6): 51-54.
[8] 樊建鵬, 范紅旗, 盧再奇. 基于高分辨率距離像的目標姿態角估計算法 [J]. 系統工程與電子技術, 2012, 34(12): 2413-2417.
[9] 李金梁, 曾勇虎, 周波, 等. 飛機目標靜態與動態測量的姿態一致性 [J]. 北京航空航天大學學報, 2013, 39(4): 453-457.
[10] Ross K L. Coordinated flight [OL]. http: ∥www. friesian.com/flight.htm., 2001.
[11] 劉帥, 李俊山, 李智生. 空襲目標典型航跡模型的設計與仿真 [J]. 電光與控制, 2007, 14(4): 128-130.
Research on Mutilating Target Six Degree-of-freedom Modeling of Air-defense Missile
LIU Heng,HU Zheng,FAN Lijun
(No.63981 Unit, Wuhan 430300, China)
Target damaging performance of air-defense missile is growing. Traditional model of air targets based on particle can not reflect various performances of target, tracking effect are not ideal. In order to solve the problem, a six degrees-of-freedom model based on body has been proposed. This model has not only 3D position information, but also 3D attitude change information, and simplified calculation was achieved based on characteristics of air targets. The simulation results show that this approach has higher tracking accuracy and stability, not apt to lose goals, can better reflect target state.
air-defense missile; air targets; rigid body model; target tracking; six degrees of freedom
2014-12-07
劉恒(1990-),男,甘肅鎮原人,工程師,研究方向:導彈裝備電子設備檢修。
TP15
A
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
兒童故事畫報(2019年5期)2019-05-26 14:26:14
光學精密工程(2016年6期)2016-11-07 09:07:19
Coco薇(2016年2期)2016-03-22 02:42:52
核科學與工程(2015年4期)2015-09-26 11:59:03
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年7期)2015-08-11 15:03:12
小雪花·成長指南(2015年4期)2015-05-19 14:47:56
