復雜干擾環境下的衛星授時接收機加固技術*
2015-03-09 01:21:50朱祥維伍貽威劉文祥王飛雪
國防科技大學學報 2015年3期
朱祥維,伍貽威,龔 航,劉文祥,王飛雪
(國防科技大學電子科學與工程學院,湖南長沙410073)
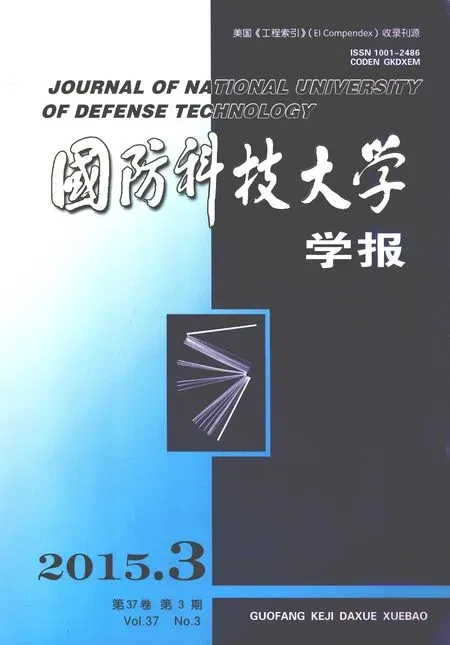
GPS等衛星導航系統出現以后,在軍事和民用領域都產生了革命性的影響。基于衛星的定位、導航和授時(Positioning,Navigation and Timing,PNT)設備廣泛應用于國民經濟各個行業。然而衛星信號有先天的脆弱性,易受阻擋、干擾,甚至欺騙。有報道指出,一個價值29美元的設備就可以對GPS信號進行阻塞甚至欺騙[1]。2008年英國政府測試使用兩個低成本干擾器阻塞了北海三十公里范圍內的GPS信號[2]。
2011年12月4日,伊朗防空部隊俘獲了一架美國“RQ-170”無人偵察機。據稱當時重構了這架無人機的GPS坐標,使其降落在了伊朗境內[3]。2012年6月,Humphreys教授團隊利用硬件成本不到1000美元的欺騙干擾生成設備,控制利用GPS民用信號導航的無人機俯沖接近地面后又拉升[4]。文獻[5]也介紹了通過欺騙手段俘獲和控制無人機的方法。文獻[6]指出,一個欺騙干擾攻擊可能導致電力網絡中的電機跳脫。這些實驗有效地證明了民用GPS信號的脆弱性和安全隱患。
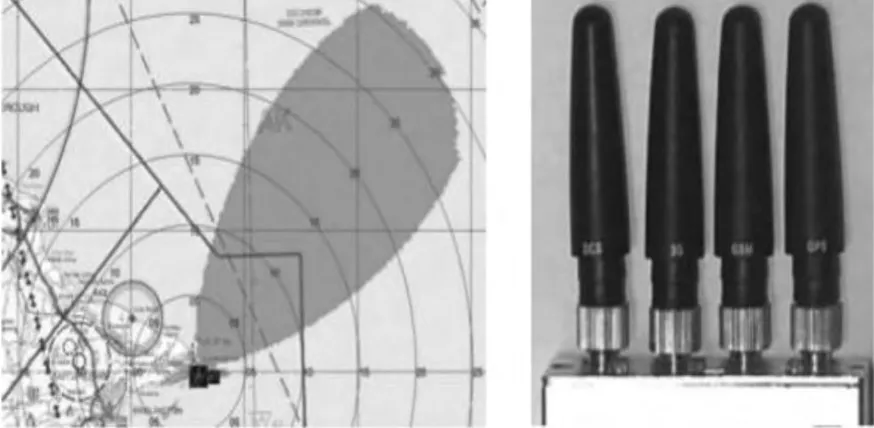
圖1 GPS干擾器的作用范圍Fig.1 The working scope of GPS jammer
而如何解決全球導航衛星系統(Global Navigation Satellite System,GNSS)應用中PNT服務的可靠性和可信度,提升服務的完好性已經成為迫在眉睫的任務。2014年,GPS之父Parkinson提出了防護加固與增強(Protect Toughen and Augment,PTA)GPS框架[7]。
1 干擾類型及特點
復雜電磁環境下,GNSS衛星授時接收機面臨的干擾可分為三類:自然環境的干擾、壓制式干擾和欺騙式干擾。
1.1 自然環境的干擾
這類干擾往往是無意的干擾,沒有明顯的針對接收機的干擾或攻擊意圖。當接收機處于復雜電磁環境中的時候,遭受這類干擾的可能性很大。自然環境的干擾主要可以分為如下幾類[8-9]:
1)帶內射頻干擾。對于GPS接收機來說,這里的帶內是指介于1565~1585MHz之間的頻帶。帶內射頻干擾包括諧波、寄生振蕩和交叉調制分量等。
2)帶外射頻干擾。帶外射頻干擾主要是靠近GPS載波頻率的強信號干擾,它可以通過接收機的射頻濾波器對接收機造成影響。
3)其他環境干擾。環境干擾包括反射多徑、地形遮攔和其他由自然環境造成的干擾。
1.2 壓制式干擾攻擊
用干擾機發射干擾信號,以某種方式遮蔽GNSS信號頻譜,使敵方GNSS接收機降低或完全失去正常工作能力,稱為壓制式干擾。主要包括[10]:
1)瞄準式干擾。GNSS衛星信號有其獨特的碼型,采用頻率瞄準技術,使干擾載頻精確對準信號載頻,針對特定碼型的衛星信號實施干擾,使該信號在一定區域內失效。
2)阻塞式干擾。這種干擾的特點是針對GNSS信號的載頻采用一部干擾機擾亂該地域出現的所有衛星信號,并且存在多種干擾體制,干擾效果不盡相同,其中干擾效果比較好的是寬帶均勻頻譜干擾體制。
3)相關式干擾。相關干擾是利用干擾信號的碼序列與GNSS信號的偽碼序列有較強的相關性這一特點實施干擾。與不相關干擾相比,它有較多的能量可以通過接收機窄帶濾波器。因而,可以以較小的功率實現與其他方式相當的干擾效果。
根據干擾的樣式又可以分為:脈沖干擾和連續波干擾兩大類。其中脈沖干擾包括單頻脈沖、線性調頻脈沖等;連續波干擾包括掃頻干擾、單頻干擾、窄帶干擾和寬帶干擾等,如圖2所示。
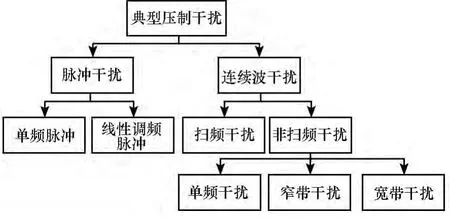
圖2 典型壓制干擾分類Fig.2 Classification of GPS suppression interference
1.3 欺騙式干擾攻擊
欺騙式干擾是指發射與GNSS信號具有相同參數的假信號,使GNSS接收機產生錯誤的定位/授時信息[11]。欺騙干擾攻擊比壓制式干擾可能更具危害性,因為欺騙攻擊甚至不會使接收機產生任何錯誤警報,這可能會給系統帶來較長時間的危害。
欺騙干擾的過程一般分為兩個步驟,即干擾信號的產生和干擾信號的發射。欺騙干擾信號的產生方式主要可分為兩類:生成式干擾和轉發式干擾[12]。
1)生成式干擾。這種干擾方式將自身產生的信號直接發射給接收機,使其產生錯誤的解算位置,達到欺騙的目的。其優點是導航信號和發射時間都由自身靈活決定,可以滯后或提前信號的發射,還可以在導航電文中給出錯誤的位置信息。其缺點是需要了解信號和導航電文的結構,難以對軍用信號實施干擾。
2)轉發式干擾。這種干擾設備通過自己的天線接收真實的衛星信號,經過適當的延遲處理后再發射給干擾區域內的接收機。該方法不需要知道信號的偽隨機碼,可以對軍用信號進行干擾。但是,相對于生成式干擾,轉發式干擾的靈活性稍差,干擾信號的時延只能大于真實信號的時延,其欺騙只能通過改變偽距的方式來實現[13]。特別針對衛星授時的轉發式干擾,可以參見文獻[14]。
根據欺騙干擾的發射方式,可以分為兩大類:單天線發射和多天線發射[14]。
1)單天線發射。單天線發射在信號發射之前不對信號進行分離,而是直接發射或轉發出去。這樣,通過單天線發射的信號一般是多顆衛星信號的疊加,目標接收機容易檢測到這些信號具有相同的到達角,因此這種欺騙方式容易被接收機識破。
2)多天線發射。多天線發射通過不同的天線發射來自不同衛星的欺騙干擾,可以獨立調節各個信號的時延,對欺騙過程有較強的可控性。但這種方式對硬件的要求比較高,需要實現信號的分離,對離散分布的天線還需要較長的線路來實現互聯和控制。
容易發現,上述干擾方式經過組合可以形成四種欺騙式干擾方案,即生成式單天線欺騙干擾,生成式多天線欺騙干擾,轉發式單天線欺騙干擾和轉發式多天線欺騙干擾。
1.4 小結
由衛星授時和定位原理可知,GNSS正確授時與定位主要依賴于兩個條件:一是正確地測量來自至少四顆衛星的偽距;二是獲得有效的導航電文。由前文考慮的干擾樣式可知,環境干擾、壓制式干擾可能造成電文誤碼率增加、偽距等測量值超差甚至接收機無法工作;欺騙干擾也是從信號測量層和數據電文層兩個層面進行偽造和攻擊。從干擾產生的機理來看,壓制干擾側重于從能量上攻擊,欺騙干擾則更多從信息上攻擊。
2 壓制干擾監測技術
壓制干擾對GPS接收的重要影響是降低載噪比(C/N0)。隨著C/N0的降低,接收機的碼環和載波環的熱噪聲增加[15-17],使得自動增益控制(Automatic Gain Control,AGC)電平、相關器功率輸出、載波相位、偽距及其變化率測量誤差增加[18],導致定位授時誤差增大。如果C/N0將降到接收機的跟蹤門限以下,接收機將失去正常工作能力。
2.1 單機層面干擾監測
從接收機結構上可以將干擾監測分為相關前干擾檢測和相關后干擾檢測。相關前干擾檢測主要是通過天線、自動增益控制(Automatic Gain Control,AGC)增益、模數轉換器(Analog-to Digital Converter,ADC)以及載噪比等接收機觀測量的提取來實現,而相關后干擾檢測是通過觀測相關器輸出功率、相關器輸出功率方差等進行。常用方法[17-23]如下。
1)AGC電平監測。AGC信號電平會根據跟蹤接收有用信號的功率增加量而不斷升高,當AGC信號電平過高時,其誤碼率也會增大,原因可能是同頻干擾信號的影響。在輸入信號功率接近正常接收門限值時,接收機的正常鎖定動作不能完成,則表明接收機遭受異常干擾。文獻[10]針對傳統AGC的不足,提出了基于限幅比例的大動態AGC算法,該算法能夠適應不同的干擾類型。
2)誤碼率監測。利用誤碼率可有效、直接改善干擾大小及有無的判斷效果。對于某一調制系統來說,設備自身出現的解調損失可實時進行測定,通常的信號附加噪聲導致的接收信號信噪比惡化量也可以進行估計,因此利用實際接收信號的誤碼率便可分析計算系統的外部干擾[18]。
3)載噪比監測。若載噪比偏高,但在系統正常工作的門限區域內,同時接受誤碼率也較高,則可基本推斷系統受到外來同頻信號干擾;若載噪比小于系統設定接收載噪比值,則可基本推斷系統受到寬帶噪聲干擾[24-25]。
此外,隨著現代信號處理技術的發展,還有一些更為復雜的干擾檢測方法,比如循環平穩特征檢測法、匹配濾波器檢測法、極化分析法及時頻分析法等。
2.2 系統層面干擾監測
除了上述單機層面的干擾監測方法外,還有一些通過組網來實現GNSS干擾監測的系統[26-27]。典型的GNSS干擾監測系統有:美國NAVSYS公司建設的干擾監測定位系統(Jammer and Interference Location System,JLOC)、美國國家大地測量機構(National Geodetic Survey,NGS)基于連續運行參考站(Continuously Operating Reference Stations,CORS)網絡的GPS干擾監測系統、中歐地球動力學參考網絡(Central Europe Geodynamics Reference Network,CEGRN)建立的GPS電磁環境監測系統等[10,28]。這些典型系統一般采用多個獨立天線,具有獨立的接收通道,多站組合,對特定區域干擾信號進行監測/定位。文獻[29]針對航空無線電導航頻段(Aeronautical Radio Navigation Service,ARNS),分析了DME/TACAN等陸基無線電導航系統對GPS L5和Galileo E5等新型GNSS導航信號的影響。此外,在系統層面實現干擾監測和定位一體化已經成為技術發展趨勢[30-31]。
3 欺騙干擾檢測技術
根據欺騙檢測技術特征的不同,本文將這些技術分為三大類:加密、檢驗和冗余。其中檢驗類是通過與已知信息的比對來判斷欺騙干擾的存在,又可以細分為三類:檢測、校驗、輔助。下面分別進行簡要介紹。
3.1 信號體制加密[32-34]
信號體制加密指的是采用鑒權的方式在信號格式中插入某些播發前無法讓攻擊方預知的秘密信息,用戶通過對這些秘密信息的真實性進行判斷,來檢測所跟蹤的信號是否真實。通常包括擴頻碼加密和電文加密兩種方式。民用導航信號可借鑒軍用信號的加密方式,在民用信號的導頻序列中每隔一段時間加入一段加密序列,使得生成欺騙干擾的成本升高。在目前導航電文中存在的預留字節中加入電文加密認證,使得欺騙干擾者不能自行生成導航電文,同時使得接收機能夠通過電文區分欺騙干擾和真實信號。
3.2 信號層參數檢測
1)信號功率檢測[35-37]。包括絕對功率檢測、信號功率變化率檢測、相對功率檢測和載噪比檢測。對接收機來說,欺騙干擾功率往往大于真實信號,這樣可以通過設置一個合理的功率上限,可判定為存在欺騙干擾。欺騙干擾源一般位于近地空間,其與接收機的位置變化會產生相對較大的功率變化,則可以通過功率變化率檢測欺騙攻擊。由于衛星發射的各頻點信號功率保持一定比例,通過檢測各頻點信號的相對功率,也可判定是否存在欺騙攻擊。
2)AGC增益檢測[38]。由于衛星導航信號到達地面的功率很低,AGC的主要作用就是調整接收鏈路的增益大小。而存在欺騙干擾信號時(轉發式欺騙放大真實GNSS信號的同時放大了噪聲),AGC增益會快速降低,以此可作為檢測欺騙干擾的判據。
3)多普勒檢測[37]。由于各顆衛星相對于接收機的運動速度和運動方向不同,因而接收機接收到的真實信號的頻率各不相同。若欺騙干擾采用轉發式和單天線發射,則難以模擬出各衛星信號的不同載頻。
4)頻點間互相關檢測[32,39]。導航衛星各頻點調制相同的P(Y)碼,在剝離載波后,將兩頻點的P(Y)碼進行互相關,通過檢測是否產生相關峰來判斷是否存在欺騙干擾。這種方法僅對生成式欺騙干擾有效,因為軍碼信號是難以偽造的。
5)多天線到達角檢測[40-44]。利用接收機的天線陣列可以通過檢測所接收各路信號的到達角來檢測欺騙干擾:一般而言,實際衛星信號的到達角不會在一段時間完全相同,而由同一干擾臺發出的欺騙干擾到達角則基本一致。為了節省實現資源,天線陣也可以通過單天線虛擬形成[44]。
6)偽碼/載波速率一致性檢測[32]。一般情況下,衛星與接收機之間相對運動是穩定的,因此接收機的碼片滑動和多普勒頻移變化是一致的。若欺騙設備在碼和載波頻率上控制不好,則可檢測到欺騙帶來的異常。
7)殘留信號檢測[45]。殘留信號檢測的前提是欺騙干擾信號無法抑制實際信號,可分為捕獲階段的殘留信號檢測和跟蹤階段的殘留信號檢測。捕獲階段檢測是通過檢測載波多普勒-偽碼相位二維搜索是否存在兩個相關峰,來判定是否存在欺騙干擾。跟蹤階段檢測是在接收機鎖定真實信號時,針對較復雜的欺騙干擾提出的。
3.3 信息解算層校驗
1)星歷/歷書校驗[46-47]。現有導航接收機能夠存貯導航衛星星歷等信息,此信息在一段時間內保持有效。利用存儲星歷或歷書與當前接收的星歷或歷書進行校驗。如果發現有明顯不一致,則說明接收機有可能受到欺騙干擾。
2)電文時鐘校驗[46-47]。衛星導航接收機收到的衛星導航電文中包含時鐘信息,不同衛星的時鐘信息應該是保持同步的,在非同步攻擊中的電文信息出現時鐘信息前后會有突變,以此可作為遭受欺騙攻擊的依據。
3)本地時鐘及變化率校驗[32]。利用靜態情況下解算鐘差及變化率或單星時差基本保持穩定的特點,當解算出的本地時鐘特性發生突變時即可懷疑受到了欺騙干擾。
4)定位解算結果檢驗[32]。對于坐標位置已知的授時接收機,可以將定位解算結果與已知坐標對比,如果存在較大偏差,則可以認為受到欺騙攻擊。
3.4 外部輔助抗欺騙
將衛星導航接收機的解算結果與其他導航定位手段的測量結果對比,如解算結果偏差超出可接受范圍,則認為存在被欺騙的可能。
1)與其他導航系統組合[37]。在衛星導航出現之前,地面無線電導航就已廣泛應用(羅蘭系統、塔康系統等),可比較衛星導航接收機解算結果與地面無線電導航系統測量結果,以確認是否受到欺騙干擾。
2)與慣導單元組合[45,48]。獨立式慣導設備不依賴外界信息,可獨立地提供多種較高精度的導航參數(位置、速度、姿態),將慣導和衛星導航組合,可以有效地判別導航結果的真實性。對于授時接收機來說,本地頻標也可以視為一種“慣性”單元。
3)與實時定位系統結合。隨著物聯網和移動互聯網的發展,實時定位系統(Real Time Location Systems,RTLS)越來越普及,其中基于WiFi、RFID、iBeacon等的定位手段也可以輔助GNSS接收機進行欺騙檢測[49]。
4)與其他傳感器對比。氣壓高度計、磁羅經、重力儀等傳感器可提供一些輔助信息給接收機參考。
3.5 冗余分析抗欺騙
冗余包括多星、多系統、多接收機等多個層面的冗余。
1)接收機自主完好性檢測。對于坐標位置未知的接收機,可以采取自主完好性檢測(Receiver Autonomous Integrity Monitoring,RAIM)的方法[50]。基本原理即通過選取接收到的5顆衛星信號中任意4顆解算接收機當前位置,通過比較5次的解算結果,若存在很大差異,說明存在欺騙干擾。這種方法在欺騙干擾較少的時候可行,如果欺騙攻擊(例如單天線發射)同時欺騙所有信號,就限制了RAIM的使用。
2)多接收機間偽碼相關性[51-55]。如果兩臺接收機正同時接收來自一顆衛星的GNSS信號,它們會收到一段相同的偽碼,兩者會產生一個互相關峰。如果沒有產生互相關峰,則證明受到了攻擊。相對于民碼來說,利用軍碼更加可靠[51-52]。當然,如果兩臺接收機受到來自同一個攻擊者的攻擊,則仍然會產生互相關峰,為此,可以考慮距離較遠的兩臺甚至多臺接收機[52-55]。
3)多接收機的矢量跟蹤回路[56-58]。該方法利用了多個裝置的接收機的位置信息,不但能更好地檢測出壓制干擾和欺騙攻擊,而且能有效地進行故障檢測;缺陷是需要傳輸基帶數據,計算量比較大。文獻[56]對該策略做了驗證實驗,結果表明該策略能夠降低干擾存在情況下的授時誤差。
4)多接收機間電文交叉檢測[59-60]。通過對多臺接收機電文的交叉檢測,容易檢測出數據級的攻擊和接收機故障。對壓制干擾攻擊也有一定效果。
3.6 小結
對上文的欺騙干擾檢測方法進行歸納總結,其結果如表1所示。
4 授時接收機加固方法
對于電力、通信、金融等對授時和同步可靠性要求非常高的系統來說,一旦受到干擾和攻擊,可能導致系統癱瘓,帶來巨大的經濟損失。下面結合授時接收機的特點,借助干擾檢測技術,給出授時接收機加固的技術框架。
表1 欺騙干擾檢測技術對比表Tab.1 Spoofing detection techniques comparison
4.1 授時接收機工作原理
衛星授時接收機由天線、射頻前端、基帶處理和時間生成四部分組成。其中天線完成各頻點信號的接收;射頻模塊對導航射頻信號進行變頻、AGC控制等;基帶部分又可以分為信號層和數據層,完成信號捕獲、跟蹤和偽距、載波相位測量,并進行授時/定位解算。時間生成模塊根據干擾檢測結果選擇工作模式。于守時模式工作時,信息處理單元輸出的鐘差信息無效,接收機時間由本地頻標維持。在授時模式工作時,選擇最優衛星信號組合和授時方式進行處理得到鐘差信息,然后通過馴服濾波模塊控制本地頻標,進而驅動時頻信號和時間信息的生成,工作流程如圖3所示。
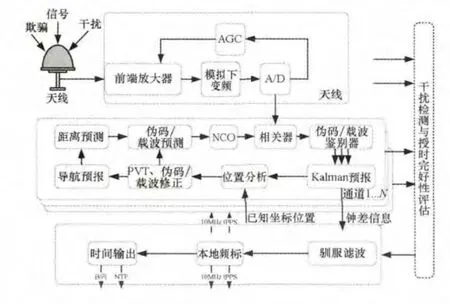
圖3 衛星授時接收機系統框圖Fig.3 GNSS timing receiver system block diagram
4.2 多層次接收機加固架構
對上文歸納總結的各種干擾檢測方法進行分析,可以發現:壓制干擾監測方法更多停留在信號參數層面;壓制干擾和欺騙干擾的檢測都在向系統化、網絡化方向發展,通過多站多機來提升檢測能力;各種干擾檢測方法都有局限性,目前尚未出現可以適用任意干擾攻擊的檢測技術。
因此,在授時接收機干擾檢測方面,需要統籌考慮壓制干擾和欺騙攻擊,結合已有的干擾檢測算法和授時接收機結構,建立一個合理的干擾檢測架構。
結合授時接收機的實現結構和處理流程,可以得到攻擊檢測的四個層次,即信號調理、跟蹤環路、導航電文和位置/鐘差解算。文獻[56]和文獻[58]對四個層面的干擾檢測技術進行了總結,給出了授時接收機加固的實現架構,如圖4所示。
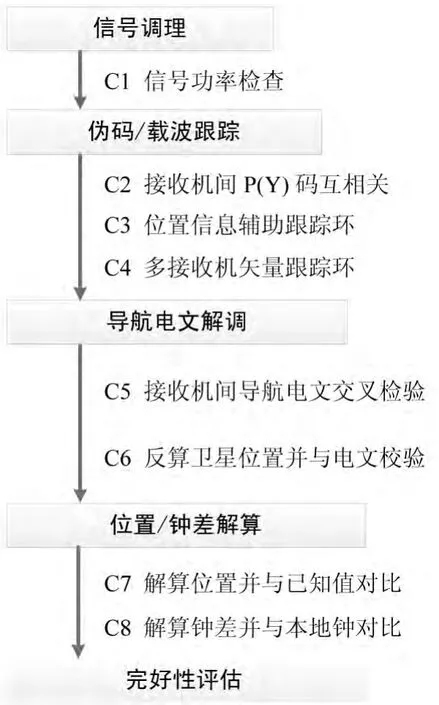
圖4 授時接收機多層加固架構Fig.4 Multi-layer toughen architecture of timing receiver
接下來簡要介紹每一步對策:
C1.信號功率檢查。欺騙攻擊的功率往往高于正常的GNSS信號,接收信號功率的升高可能意味著欺騙攻擊。
C2.接收機間P(Y)碼相關性驗核。兩個接收機接收同一衛星的P(Y)碼沒有產生互相關峰,則證明受到了攻擊。但是,如果兩臺接收機受到來自同一個攻擊者的攻擊,則仍然會產生互相關峰。該方法需要將高速基帶采樣數據傳輸至數據網絡,代價頗高。
C3.位置信息輔助跟蹤環。利用授時接收機已知的位置信息,可以算出衛星與接收機之間的相對位置與相對速度在視線(Line Of Sight,LOS)方向的投影,以此來預測攻擊情況。
C4.多接收機矢量跟蹤環。這個方法利用了多個接收機的位置信息,對信噪比比較低的信號特別適用,缺陷是計算量比較大。
C5.接收機間導航電文交叉檢驗。這個方法容易檢測出數據級的欺騙攻擊,對壓制干擾攻擊也有一定效果。
C6.反算衛星位置并與電文校驗。由于各接收機的位置固定且已知,可以由多個接收機聯立方程組解出衛星的位置,如果與導航數據不匹配,則說明存在攻擊。這個方法的精度跟接收機與衛星的相對幾何位置有關,建議選擇位置較分散的接收機。
C7.解算位置并與已知值對比。容易發現,對單個接收機來說,這個方法對轉發攻擊是有效的。因為所考慮的每個接收機擁有其他接收機的位置信息,如果某個接收機發現別的接收機的位置數據不正確了,便是受到了攻擊。
C8.解算鐘差并與本地時鐘對比。畢竟欺騙攻擊和接收端故障不是經常發生的,可以統計接收端的時鐘數據,根據這些數據特征考察新解出的時間值,分析攻擊的可能性。文獻[58]指出,由于接收機時鐘的隨機性和易變性,這個方法通常是作為輔助手段。
文獻[58]對干擾檢測策略與威脅模型的關系進行了歸納,本文對其進行了重新梳理,如表2所示。其中星號代表某策略對相應的威脅模型是有效的,空心圈代表某策略只能作為相應威脅模型的輔助檢測,實心點則代表某策略對相應的威脅模型是無效的。
4.3 基于鐘差輔助的干擾檢測
文獻[56]和文獻[58]對授時接收機的穩健性提出了多層次的穩健性架構,重點是針對信號處理環路方面,特點是充分利用位置信息輔助。這些方法對轉發式欺騙效果較差,而且文獻[10]針對授時接收機已知位置設計了相應的欺騙攻擊,從而使得位置信息輔助失效。其實,充分利用多星多系統間鐘差數據特征和數據冗余性,以及接收機本地時鐘的特性,是提高授時接收機穩健性的有效措施。
鑒于此,本文提出了一種基于多源鐘差數據輔助的干擾檢測方法,如圖5中“鐘差數據輔助”模塊所示,該方法在信息處理層面充分利用多GNSS系統時間偏差關系以及本地頻標信息,通過數據融合和最優濾波實現完好性和精度提升。此文,在信號分析方面,充分利用位置信息輔助和多GNSS系統之間交叉檢驗的優勢,通過多信號參數檢測等實現干擾檢測,可以視為文獻[56]和文獻[58]中位置信息輔助的進一步延伸。
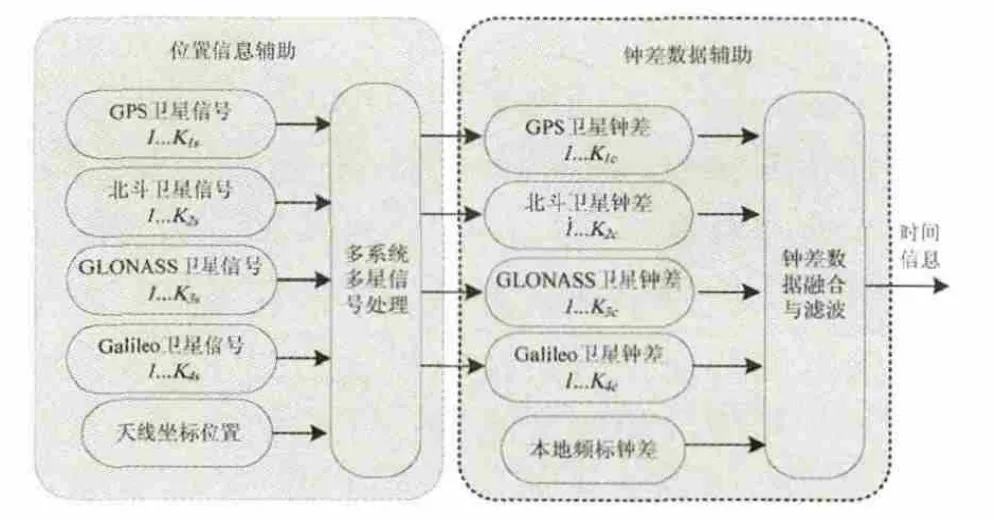
圖5 基于鐘差和位置輔助的干擾檢測原理框圖Fig.5 Principle diagram of interference detection based on clock error and position aided
4.4 基于網絡輔助的干擾檢測
從實施欺騙攻擊的難度來說,對同一個區域的接收機實施全方位干擾比對異地多機同時實施干擾要容易得多。文獻[56]和文獻[58]等提到了利用多個授時接收機的信息進行干擾檢測,但是更多停留在接收機之間夾叉檢驗(比如C2,C5),其對接收機和傳輸網絡要求較高,接收機之間耦合度較高。
以通信基站授時系統為例,其特點是設備眾多、分布較廣、單機成本較低且存在數據通道。考慮到授時網絡的特點,充分利用多臺接收機特別是廣域范圍內的授時接收機的數據,本文提出一種基于網絡輔助、多接收機數據融合的干擾檢測方法,如圖6所示。
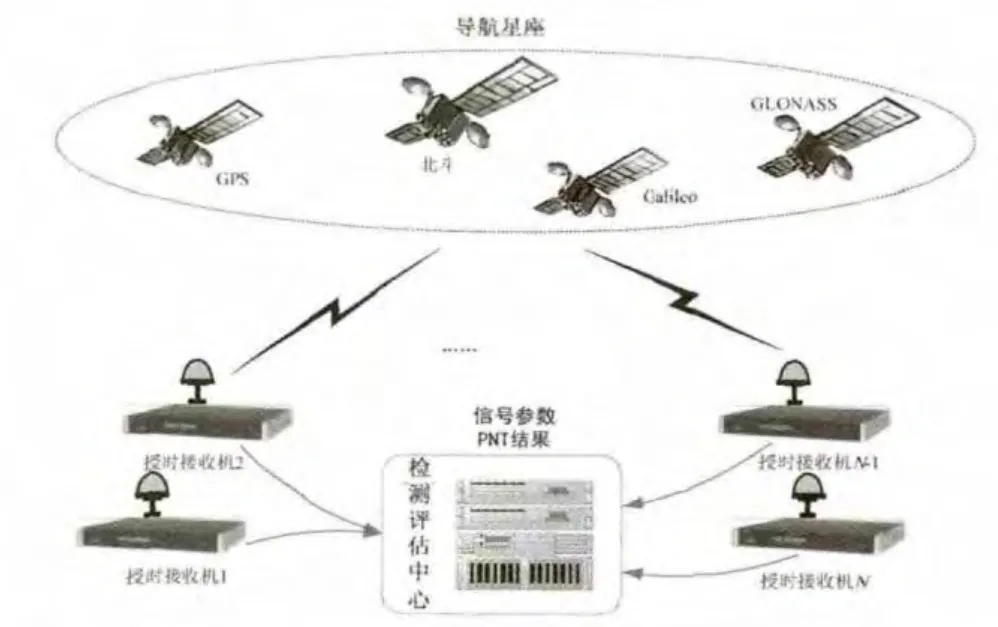
圖6 基于授時網絡輔助的干擾檢測評估方法Fig.6 Interference detection and evaluation method based on the timing receiver network aided
圖6中的檢測評估中心匯總全網范圍內各接收機的信號參數和PNT解算結果,借助大數據挖掘的思路,通過一定模型算法,可以對欺騙干擾進行檢測、評估和定位。畢竟,要實現大面積區域的欺騙干擾是非常困難的。基于網絡的干擾檢測系統不但可以進行干擾檢測評估,還可以支持電磁環境分析、大氣探測和地球動力學等研究。
5 結論
通信、電力、金融等系統中的GNSS授時接收機具有普通接收機不具備的特點,包括位置已知、具有本地時鐘和多機聯網等。這些特點為授時接收機更好地進行干擾檢測提供了便利條件。本文對復雜電磁環境下授時接收機面臨的干擾和欺騙攻擊以及相應的檢測策略進行了歸納總結。在充分考慮授時接收機特點和架構基礎上,給出了多層次的授時接收機加固架構。在此基礎上,考慮充分利用多衛星多系統間鐘差數據特征和接收機本地時鐘特性,提出了基于多源鐘差數據輔助的干擾檢測方法;進一步結合通信、電力等授時接收機網絡,提出了網絡輔助的干擾檢測方法,通過對全網接收機信號參數和解算結果的匯總分析與數據挖掘,可以實現對干擾的檢測、評估和定位。上述研究成果可為提升復雜干擾環境下GNSS衛星授時的可靠性和完好性提供有力支持。
References)
[1]Gould J.Ausa:army seeks new positioning tech[N].Defense News,2014,10:18.
[2]Last D D.GPS:the present imperfect[J].Inside GNSS,2010,05:60-64.
[3]Giray S M.Anatomy of unmanned aerial vehicle hijacking with signal spoofing[C]//Proceedings of International Conference on Recent Advances in Space Technologies,IEEE,2013:795-800.
[4]Shepard D P,Bhatti J A,Humphreys T E,et al.Evaluation of smart grid and civilian UAV vulnerability to GPS spoofing attacks[C]//Proceedings of the 25th International Technical Meeting of the Satellite Division of the Institute of Navigation,2012:3591-3605.
[5]Kerns A J,Shepard D P,Bhatti J A,et al.Unmanned aircraft capture and control via GPS spoofing[J].Journal of Field Robotics,2014,31(4):617-636.
[6]Shepard D P,Humphreys T E,Fansler A A.Going up against time:the power grid's vulnerability to GPS spoofing attacks[J].GPS World,2012(8):34-38.
[7]Parkinson B W.Assured PNT for our future:PTA[J].GPS World,2014(9):24-31.
[8]王李軍.GPS接收機抗干擾若干關鍵技術研究[D].南京:南京理工大學,2006.WANG Lijun.Study on some key techniques of GPS receiver anti-jamming[D].Nanjing:Nanjing University of Science and Technology,2006.(in Chinese)
[9]Dovis F,Musumeci L,Linty N,et al.Recent trends in interference mitigation and spoofing detection[J].International Journal of Embedded and Real-Time Communication Systems,2012,3(3):1-17.
[10]黃婷.衛星導航系統壓制式干擾監測關鍵技術研究[D].長沙:湖南大學,2014.HUANG Ting.The key technology research on blanketing jamming monitoring of satellite navigation system[D].Changsha:Hunan University,2014.(in Chinese)
[11]Shepard D.Characterization of receiver response to spoofing attacks[D].USA:University of Texas at Austin,2011.
[12]黃龍,呂志成,王飛雪.針對衛星導航接收機的欺騙干擾研究[J].宇航學報,2012,33(7):884-890.HUANG Long,LYU Zhicheng,WANG Feixue.Spoofing pattern research on GNSS receivers[J].Journal of Astronautics,2012,33(7):884-890.(in Chinese)
[13]耿正霖,聶俊偉,王飛雪.GNSS抗欺騙干擾技術研究[J].全球定位系統,2013,38(4):65-70.GENG Zhenglin,NIE Junwei,WANG Feixue.Study of GNSS anti-spoofing techniques[J].GNSS World of China,2013,38(4):65-70.(in Chinese)
[14]黃龍,龔航,朱祥維,等.針對GNSS授時接收機的轉發式欺騙干擾技術研究[J].國防科技大學學報,2013,35(4):93-96.HUANG Long,GONG Hang,ZHU Xiangwei,et al.Research of reradiating spoofing technique to GNSS timing receiver[J].Journal of National University of Defense Technology,2013,35(4):93-96.(in Chinese)
[15]Balaei A T,Dempster A G,Lo Presti L.Characterization of the effects of CW and pulse CW interference on the GPS signal quality[J].Aerospace&Electronic Systems IEEE Transactions on,2009,45(4):1418-1431.
[16]Bhuiyan M Z H,Kuusniemi H S,derholm S,et al.The impact of interference on GNSS receiver observables—a running digital sum based simple jammer detector[J].Radioengineering,2014,23(3):898-906.
[17]Ndili A,Enge P.GPS receiver autonomous interference detection[C]//Proceedings of IEEE Position Location and Navigation Symposium,1998:123-130.
[18]田愛國,劉志春,杜黎明,等.GPS干擾監測技術[J].全球定位系統,2008,33(3):5-8.TIAN Aiguo,LIU Zhichun,DU Liming,et al.GPS interference monitoring technique[J].GNSS World of China,2008,33(3):5-8.(in Chinese)
[19]韓其位,曾祥華,李崢嶸,等.衛星導航干擾監測技術的發展現狀與趨勢[J].航天電子對抗,2009,25(6):17-19.HAN Qiwei,ZENG Xianghua,Li Zhengrong,et al.Recent development and prospect of interference monitoring for GNSS bands[J].Aerospace Electronic Warfare,2009,25(6):17-19.(in Chinese)
[20]楚恒林,李獻球.衛星網絡干擾信號的監測與定位技術[J].無線電通信技術,2010,36(3):48-50.CHU Henglin,LI Xianqiu.Detection and location technique of satellite network interference signals[J].Radio Communications Technology,2010,36(3):48-50.(in Chinese)
[21]汪立萍,張益龍.GPS防護及干擾監測與定位技術研究[J].航天電子對抗,2012,28(6):32-34.WANG Liping,ZHANG Yilong.GPS protection and technique of interference detection and location[J].Aerospace Electronic Warfare,2012,28(6):32-34.(in Chinese)
[22]范廣偉,晁磊,劉莉.衛星導航干擾監測技術[J].四川兵工學報,2013,34(6):125-128.FAN Guangwei,CHAO Lei,LIU Li.Technology of interference monitoring for GNSS[J].Journal of Sichuan Ordnance,2013,34(6):125-128.(in Chinese)
[23]Bastide F,Chatre E,Macabiau C.GPS interference detection and identification using multicorrelator receivers[C]//Proceedings of the 14th International Technical Meeting of the Satellite Division of the Institute of Navigation,2001:872-881.
[24]Balaei A T,Dempster A G,Barnes J.A novel approach in detection and characterization of CW interference of GPS signal using receiver estimation of C/N0[C]//Proceedings of IEEE/ION Position,Location and Navigation Symposium,2006:1120-1126.
[25]Balaei A T,Dempster A G.A statistical inference technique for GPS interference detection[J].IEEE Transactions on Aerospace&Electronic Systems,2009,45(4):1499-1511.
[26]Chen L,Han C,Du L,et al.Analysis of GNSS IDM situation and its revelation to us[C]//Proceedings of China Satellite Navigation Conference,Lecture Notes in Electrical Engineering,2012:47-57.
[27]Brown A,Reynolds D,Roberts D,et al.Jammer and interference location[C]//Proceedings of the 12th International Technical Meeting of the Satellite Division of the Institute of Navigation,1999:137-142.
[28]Simonsen K,Suycott M,Crumplar R,et al.LOCO GPSI:detection and location of GPS interference/jamming[C]//Proceedings of the 17th International Technical Meeting of the Satellite Division of the Institute of Navigation,2004:555-560.
[29]Gao G X,Heng L,Hornbostel A,et al.DME/TACAN interference mitigation for GNSS:algorithms and flight test results[J].GPS Solutions,2013,17(4):561-573.
[30]Gromov K G.GIDL:generalized interference detection and localization system[D].USA:Stanford University,2002.
[31]Bours A,Cetin E,Dempster A G.Enhanced GPS interference detection and localisation[J].Electronics Letters,2014,50(19):1391-1393.
[32]周軒,李廣俠,蔡錠波,等.衛星導航系統防欺騙技術的回顧與展望[J].導航定位學報,2013,1(3):79-84.ZHOU Xuan,LI Guangxia,CAI Dingbo,et al.Review and prospect of GNSS anti-spoofing techniques[J].Journal of Navigation and Positioning,2013,1(3):79-84.(in Chinese)
[33]Wesson K,Rothlisberger M,Humphreys T.Practical cryptographic civil GPS signal authentication[J].Journal of the Institute of Navigation,2012,59(3):177-193.
[34]Scott L.Anti-spoofing&authenticated signal architectures for civil navigation systems[C]//Proceedings of the 16th International Technical Meeting of the Satellite Division of the Institute of Navigation,2003:1543-1552.
[35]Key E L.Techniques to counter GPS spoofing[R].Internal Memorandum,the MITRE Corporation,1995.
[36]Jafarnia A J,Broumandan A,Nielsen J,et al.GPS spoofer countermeasure effectiveness based on signal strength,noise power,and C/N0 measurements[J].International Journal of Satellite Communications and Networking,2012,30(4):181-191.
[37]Wen H Q,Huang P Y,Dyer J,et al.Countermeasures for GPS signal spoofing[C]//Proceedings of the 2005 International Technical Meeting of the Institute of Navigation,2005:13-16.
[38]Akos D M.Who’s afraid of the spoofer?GPS/GNSS Spoofing detection via automatic gain control(AGC)[J].Navigation,2012,59(4):281-290.
[39]O'Hanlon B W,Psiaki M L,Bhatti J A,et al.Real time GPS spoofing detection via correlation of encrypted signals[J].Navigation,2013,60(4):267-278.
[40]Montgomery P Y,Humphreys T E,Ledvina B M.Receiverautonomous spoofing detection:experimental results of a multi-antenna receiver defense against a portable civil GPS spoofer[C]//Proceedings of the 2009 International Technical Meeting of the Institute of Navigation,2009:124-130.
[41]Montgomery P Y,Humphreys T E,Ledvina B M.A multiantenna defense:receiver-autonomous GPS spoofing detection[J].Inside GNSS,2009,4(2):40-46.
[42]張鑫,龐晶,蘇映雪,等.天線陣載波相位雙差的欺騙干擾檢測技術[J].國防科技大學學報,2014,36(4):21-23.ZHANG Xin,PANG Jin,SU Yingxue,et al.Spoofing detection technique on antenna array carrier phase double difference[J].Journal of National University of Defense Technology,2014,36(4):21-23.(in Chinese)
[43]Broumandan A,Jafarnia-Jahromi A,Dehghanian V,et al.GNSS spoofing detection in handheld receivers based on signal spatial correlation[C]//Proceedings of IEEE/ION.Position Location and Navigation Symposium(PLANS),2012:479-487.
[44]Psiaki M L,Powell S P,O’Hanlon B W.GNSS spoofing detection using high-frequency antenna motion and carrierphase data[C]//Proceedings of the 26th International Technical Meeting of the Satellite Division of the Institute of Navigation,2013:2949-2991.
[45]Humphreys T E,Ledvina B M,Psiaki M L,et al.Assessing the spoofing threat development of a portable GPS civilian spoofer[C]//Proceedings of the 21st International Technical Meeting of the Satellite Division of the Institute of Navigation,2008:2314-2325.
[46]Jafarnia-Jahromi A,Broumandan A,Nielsen J,et al.GPS vulnerability to spoofing threats and a review of antispoofing techniques[J].International Journal of Navigation and Observation,2012(2012):1-16.
[47]Shepard D P,Humphrys T E.Characterization of receiver response to a spoofing attack[C]//Proceedings of the 24th International Technical Meeting of the Satellite Division of the Institute of Navigation,2011:2608-2618.
[48]李四海,劉洋,張會鎖,等.慣性信息輔助的衛星導航欺騙檢測技術[J].中國慣性技術學報,2013,21(3):336-340.LI Sihai,LIU Yang,ZHANG Huisuo,et al.Inertial measurements aided GNSS spoofing detection technique[J].Journal of Chinese Inertial Technology,2013,21(3):336-340.(in Chinese)
[49]Progri I.Geolocation of RF signals:principles and simulations[M].USA:Springer Science&Business Media,2011.
[50]Cheng X J,Cao K J,Xu J N,et al.Analysis on forgery patterns for GPS civil spoofing signals[C]//Proceedings of the 4th International Conference on Computer Sciences and Convergence Information Technology,ICCIT'09,2009:353-356.
[51]Psiaki M L,O’Hanlon B W,Bhatti J A,et al.Civilian GPS spoofing detection based on dual receiver correlation of military signals[C]//Proceedings of the 24th International Technical Meeting of the Satellite Division of the Institute of Navigation,2011:2619-2645.
[52]Psiaki M,O'Hanlon B W,Bhatti J A,et al.GPS spoofing detection via dual-receiver correlation of military signals[J].IEEE Transactions on Aerospace and Electronic Systems,2013,49(4):2250-2267.
[53]O’Hanlon B W,Psiaki M,Humphreys T E,et al.Real-time spoofing detection using correlation between two civil GPS receiver[C]//Proceedings of the 25th International Technical Meeting of the Satellite Division of the Institute of Navigation,2012:3584-3590.
[54]Swaszek P F,Hartnett R J,Kempe M V,et al.Analysis of a simple,multi-receiver GPS spoof detector[C]//Proceedings of the 2013 International Technical Meeting of the Institute of Navigation,2013:884-892.
[55]Swaszek P F,Hartnett R J.Spoof detection using multiple COTS receivers in safety critical applications[C]//Proceedings of the 26th International Technical Meeting of the Satellite Division of the Institute of Navigation,2013:2921-2930.
[56]Heng L,Makela J J,Dominguez-Garcia A D,et al.Reliable GPS-based timing for power systems:a multi-layered multireceiver architecture[C]//Proceedings of Power and Energy Conference at Illinois(PECI),2014:1-7.
[57]Jafarnia-Jahromi A,Lin T,Broumandan A,et al.Detection and mitigation of spoofing attacks on a vector-based tracking GPS receiver[C]//Proceedings of the 2012 International Technical Meeting of the Institute of Navigation,2012:790-800.
[58]Heng L,Chou D,Gao G X.Reliable GPS-based timing for power systems[J].Inside GNSS,2014(6):38-45.
[59]Lo S,De Lorenzo D,Enge P,et al.Signal authentication:a secure civil GNSS for today[J].Inside GNSS,2009(5):30-39.
[60]Heng L,Work D B,Gao G X.Cooperative GNSS authentication:reliability from unreliable peers[J].Inside GNSS,2013(5):70-75.
猜你喜歡
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
電子制作(2018年11期)2018-08-04 03:25:42
中華手工(2017年2期)2017-06-06 23:00:31
海峽科技與產業(2016年3期)2016-05-17 04:32:12
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
中外會展(2014年4期)2014-11-27 07:46:46