基于終端滑模的直接力/氣動(dòng)力復(fù)合控制系統(tǒng)設(shè)計(jì)
2015-03-11 05:15:57趙玉杰廖志忠段朝陽(yáng)張公平
導(dǎo)航定位與授時(shí) 2015年3期
關(guān)鍵詞:設(shè)計(jì)
趙玉杰,廖志忠,段朝陽(yáng),張公平
(中國(guó)空空導(dǎo)彈研究院, 河南 洛陽(yáng) 471009)
?
基于終端滑模的直接力/氣動(dòng)力復(fù)合控制系統(tǒng)設(shè)計(jì)
趙玉杰,廖志忠,段朝陽(yáng),張公平
(中國(guó)空空導(dǎo)彈研究院, 河南 洛陽(yáng) 471009)
針對(duì)空空導(dǎo)彈直接力/氣動(dòng)力復(fù)合控制問(wèn)題,建議一種基于非奇異快速終端滑模控制方法(NFTSM)和動(dòng)態(tài)控制分配技術(shù)的復(fù)合控制策略。根據(jù)導(dǎo)彈縱向運(yùn)動(dòng)模型設(shè)計(jì)非奇異快速終端滑模控制器,獲得建立導(dǎo)彈過(guò)載所需要的控制力矩。采用動(dòng)態(tài)控制分配將期望的控制力矩映射到氣動(dòng)舵和直接力裝置。仿真結(jié)果表明,提出方法適用于空空導(dǎo)彈直接力/氣動(dòng)力復(fù)合控制系統(tǒng)設(shè)計(jì),能夠快速精確跟蹤過(guò)載指令。
直接力/氣動(dòng)力復(fù)合控制;非奇異快速終端滑模;動(dòng)態(tài)控制分配;控制力矩
0 引言
傳統(tǒng)空空導(dǎo)彈利用空氣舵偏轉(zhuǎn)產(chǎn)生氣動(dòng)控制力矩改變導(dǎo)彈姿態(tài),進(jìn)而建立攻角,依靠氣動(dòng)升力產(chǎn)生導(dǎo)彈過(guò)載。隨著具備隱身、高機(jī)動(dòng)、超聲速巡航能力的空中威脅大量涌現(xiàn),未來(lái)戰(zhàn)場(chǎng)環(huán)境更加復(fù)雜多變,從而對(duì)新一代空空導(dǎo)彈提出更嚴(yán)峻的挑戰(zhàn)。單純依賴氣動(dòng)舵產(chǎn)生氣動(dòng)控制越來(lái)越難以應(yīng)對(duì)未來(lái)的作戰(zhàn)環(huán)境。為提高空空導(dǎo)彈的作戰(zhàn)能力,改善導(dǎo)彈的響應(yīng)特性,空空導(dǎo)彈引入姿控式直接側(cè)向力與氣動(dòng)舵形成復(fù)合控制,從而快速改變導(dǎo)彈姿態(tài)。
對(duì)于直接力/氣動(dòng)力復(fù)合控制系統(tǒng)設(shè)計(jì)問(wèn)題,國(guó)內(nèi)外學(xué)者已做了大量研究工作[1-3],但這些設(shè)計(jì)方法大多建立在精確的數(shù)學(xué)模型基礎(chǔ)上。直接力裝置的引入,帶來(lái)了側(cè)向噴流干擾效應(yīng),復(fù)雜的工作環(huán)境使得復(fù)合控制系統(tǒng)難以精確建模,同時(shí)執(zhí)行機(jī)構(gòu)具有不同動(dòng)態(tài)特性,彼此間的協(xié)調(diào)也成為直接力/氣動(dòng)力復(fù)合控制系統(tǒng)設(shè)計(jì)所面臨的主要問(wèn)題。傳統(tǒng)的設(shè)計(jì)方法與設(shè)計(jì)理念將很難實(shí)際解決復(fù)合控制系統(tǒng)設(shè)計(jì)問(wèn)題。滑模控制具有響應(yīng)快,對(duì)參數(shù)攝動(dòng)外部擾動(dòng)不變性等優(yōu)點(diǎn),特別適用于非線性不確定系統(tǒng)。傳統(tǒng)滑模系統(tǒng)狀態(tài)到平衡點(diǎn)的收斂是漸近的,終端滑模系統(tǒng)狀態(tài)能在有限時(shí)間收斂至平衡點(diǎn),具有更高穩(wěn)態(tài)精度。普通的終端滑模設(shè)計(jì)方法中存在奇異問(wèn)題,馮勇等提出一種非奇異終端滑模控制,使控制律無(wú)負(fù)指數(shù)項(xiàng),但在遠(yuǎn)離平衡點(diǎn)處收斂緩慢,并且系統(tǒng)仍存在抖振問(wèn)題[4]。李升波等針對(duì)二階不確定非線性系統(tǒng),提出一種非奇異快速終端滑模控制方法,設(shè)計(jì)非奇異快速終端滑模面,采用新的滑模趨近律,既解決終端滑模奇異性問(wèn)題,又解決滑模控制收斂緩慢和抖振問(wèn)題[5]。
本文以末制導(dǎo)段空空導(dǎo)彈為研究對(duì)象,通過(guò)建立過(guò)載控制數(shù)學(xué)模型,并作一定變換,設(shè)計(jì)了一種非奇異快速終端滑模控制和動(dòng)態(tài)控制分配技術(shù)相結(jié)合的復(fù)合控制策略,實(shí)現(xiàn)對(duì)導(dǎo)彈過(guò)載的快速精確跟蹤。
1 復(fù)合控制系統(tǒng)數(shù)學(xué)模型
1.1 彈體動(dòng)力學(xué)模型
直接力/氣動(dòng)力復(fù)合控制空空導(dǎo)彈采用直接力位于質(zhì)心后的姿控方式,彈體配置方式如圖1所示。
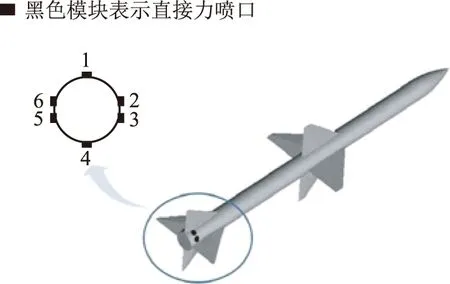
圖1 姿控式復(fù)合控制空空導(dǎo)彈彈體配置Fig.1 The structure of the air-to-air missile with blended control
為了便于說(shuō)明控制系統(tǒng)設(shè)計(jì)過(guò)程,只考慮導(dǎo)彈末制導(dǎo)段在縱向平面的姿態(tài)控制問(wèn)題,將導(dǎo)彈的質(zhì)量和速度視為常值,建立導(dǎo)彈姿態(tài)運(yùn)動(dòng)的數(shù)學(xué)模型,如式(1)~式(3)所示。
(1)
(2)
(3)
其中,α為導(dǎo)彈攻角,ωz為俯仰角速率,ny為導(dǎo)彈過(guò)載,δz為升降舵偏角,fy為側(cè)噴發(fā)動(dòng)機(jī)產(chǎn)生的直接力。a1、a2、a3、a3′、a4、a5、a5′為動(dòng)力學(xué)系數(shù),其中a3′=-l/jz,a5′=1/mV,jz為轉(zhuǎn)動(dòng)慣量,l為側(cè)噴發(fā)動(dòng)機(jī)到質(zhì)心距離,m為導(dǎo)彈質(zhì)量,V為導(dǎo)彈飛行速度。
設(shè)虛擬控制輸入σ為控制力矩
σ=Wu
(4)


(5)
(6)
其中
式中Km為導(dǎo)彈傳遞系數(shù),單位為s-1;Tm為導(dǎo)彈時(shí)間常數(shù),單位為s;ξm為導(dǎo)彈相對(duì)阻尼系數(shù),量綱為1。

(7)
1.2 執(zhí)行機(jī)構(gòu)數(shù)學(xué)模型
氣動(dòng)舵數(shù)學(xué)模型描述為如下二階系統(tǒng)
(8)
直接力裝置數(shù)學(xué)模型描述為如下一階系統(tǒng)
(9)
式中:


ωδ,ξ分別為舵系統(tǒng)無(wú)阻尼自振頻率和阻尼比;
δz,min,δz,max分別為舵偏轉(zhuǎn)角的下界與上界;
fy,min,fy,max為直接力裝置推力的下界與上界;
2 復(fù)合控制設(shè)計(jì)
直接側(cè)向力/氣動(dòng)力復(fù)合控制主要目的是實(shí)現(xiàn)過(guò)載快速精確跟蹤。設(shè)計(jì)非奇異快速終端滑模控制律,得到期望的控制力矩,通過(guò)動(dòng)態(tài)控制分配技術(shù)將控制力矩分別映射到氣動(dòng)舵系統(tǒng)和直接力系統(tǒng),操縱導(dǎo)彈改變姿態(tài),控制導(dǎo)彈運(yùn)動(dòng)。系統(tǒng)結(jié)構(gòu)如圖2所示。
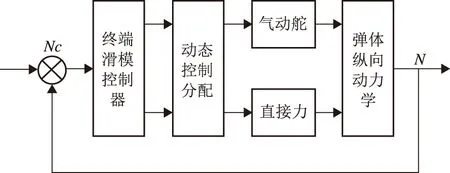
圖2 復(fù)合控制策略Fig.2 The blended control strategy
2.1 非奇異快速終端滑模方法
對(duì)于如下二階系統(tǒng)
(10)

(11)
式中κ∈R+,υ∈R+,p,q,g,h為奇數(shù),要求滿足1
p/q以保障滑模面的非奇異性,采用一種帶負(fù)指數(shù)項(xiàng)的終端吸引子設(shè)計(jì)趨近律
(12)
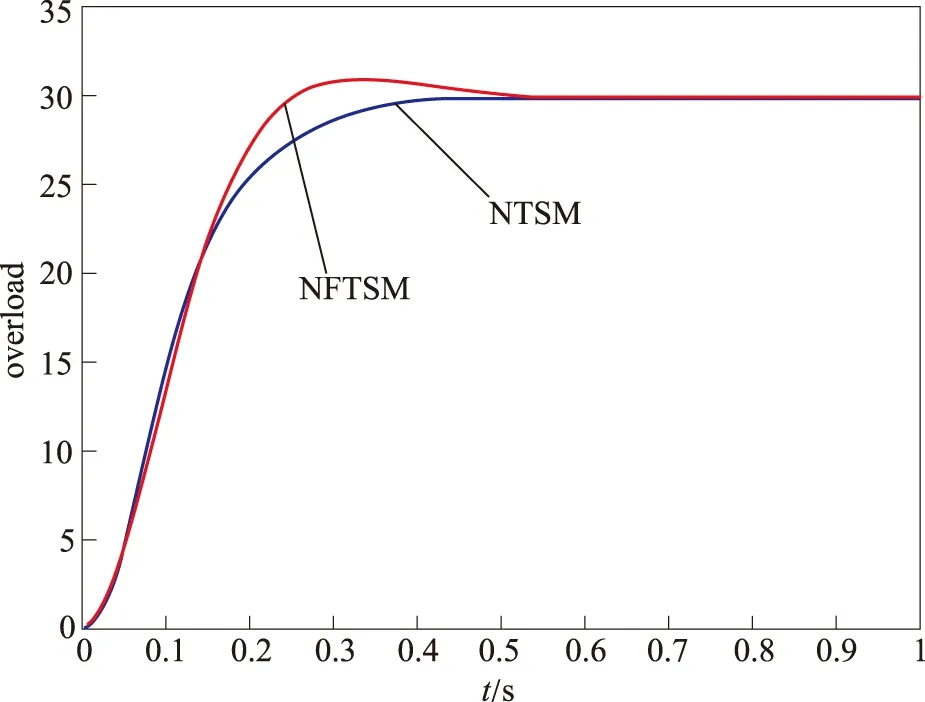
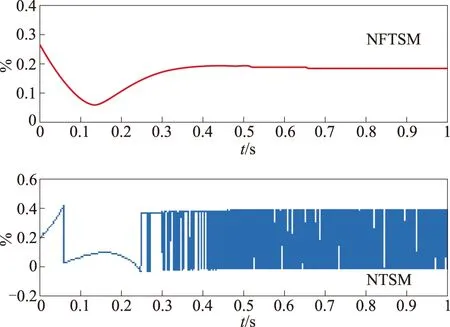
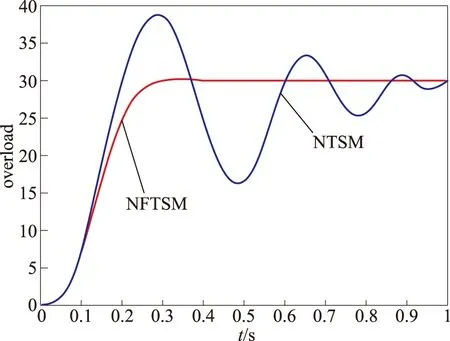
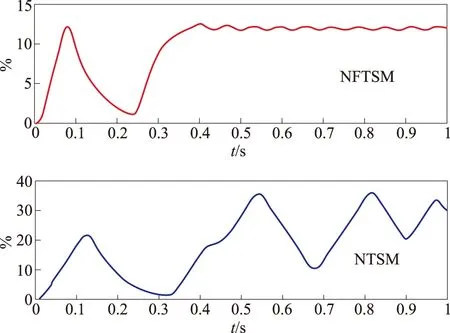
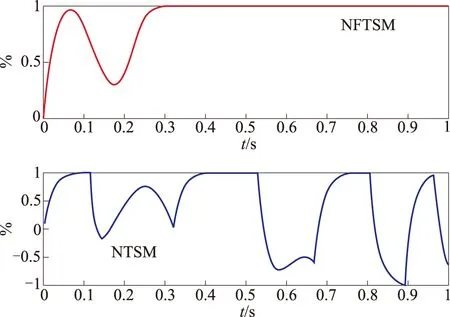
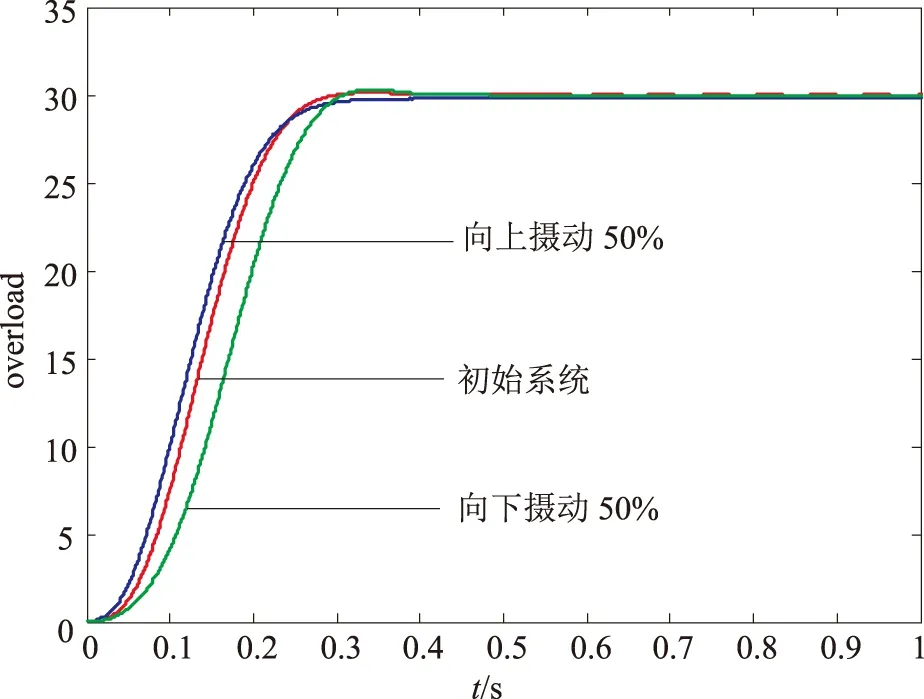
其中φ∈R+,γ∈R+,m,n∈N為奇數(shù),要求滿足0 (13) 由于1 1,所以式(13)中狀態(tài)變量x1,x2的指數(shù)皆大于零,無(wú)負(fù)指數(shù)項(xiàng),這說(shuō)明基于滑模面(11)和趨近律(12)設(shè)計(jì)的控制方法完全避免奇異問(wèn)題,且控制律時(shí)間連續(xù),無(wú)抖振。系統(tǒng)狀態(tài)有限時(shí)間收斂,收斂時(shí)間 (14) 其中: 2.2 復(fù)合控制系統(tǒng)過(guò)載跟蹤控制器設(shè)計(jì) (15) 非奇異快速終端滑模面設(shè)計(jì)為 (16) 控制律 (17) 2.3 動(dòng)態(tài)控制分配設(shè)計(jì) 如式(8)~式(9)所示,直接力/氣動(dòng)力復(fù)合控制空空導(dǎo)彈有兩種不同的執(zhí)行機(jī)構(gòu),即直接力裝置和氣動(dòng)舵。為了達(dá)到快速建立過(guò)載的目的,需要對(duì)這兩種執(zhí)行機(jī)構(gòu)進(jìn)行協(xié)調(diào)控制,一般采用分配的方法來(lái)實(shí)現(xiàn)。但目前大多數(shù)分配方法屬靜態(tài)分配,沒(méi)有考慮執(zhí)行機(jī)構(gòu)的動(dòng)態(tài)特性。這將嚴(yán)重影響分配精度和控制系統(tǒng)系統(tǒng)性能。在動(dòng)態(tài)分配的優(yōu)化指標(biāo)中,額外考慮由執(zhí)行機(jī)構(gòu)動(dòng)態(tài)特性引起的時(shí)間延遲,在考慮位置和速率飽和約束條件下,使執(zhí)行機(jī)構(gòu)實(shí)際產(chǎn)生的控制作用與期望的總的控制作用近似相等[6]。 氣動(dòng)舵偏角和偏轉(zhuǎn)角速率約束以及直接力推力和速率約束如下: (18) (19) 速率約束也可看成位置約束形式 (20) 由式(18)~式(20),將氣動(dòng)舵與直接力的組合飽約束寫為 (21) 將控制分配問(wèn)題轉(zhuǎn)化為一個(gè)受約束二次型規(guī)劃問(wèn)題[7]: Bu(t)-v(t)=0 Cu(t)-U≥0 (22) 圖3 過(guò)載隨時(shí)間變化曲線Fig.3 Curve of the change of overload 圖4 舵偏角隨時(shí)間變化曲線Fig.4 Curve of the change of actuator deflection 圖5 直接力隨時(shí)間變化曲線Fig.5 Curve of the change of reaction-jet 圖6 過(guò)載隨時(shí)間變化曲線Fig.6 Curve of the change of overload 圖7 舵偏角隨時(shí)間變化曲線Fig.7 Curve of the change of actuator deflection 圖8 直接力隨時(shí)間變化曲線Fig.8 Curve of the change of reaction-jet 圖3~圖5為未考慮執(zhí)行機(jī)構(gòu)位置、速率約束和動(dòng)態(tài)特性時(shí)的仿真結(jié)果。可以看出,NFTSM系統(tǒng)與NTSM系統(tǒng)過(guò)載響應(yīng)時(shí)間均約為0.1s,但前者具有更快的過(guò)載跟蹤速度;NTSM系統(tǒng)舵偏角指令與直接力指令均存在嚴(yán)重抖振現(xiàn)象,且舵偏角已明顯超出氣動(dòng)舵最大偏轉(zhuǎn)角。圖6~圖8為考慮執(zhí)行機(jī)構(gòu)位置、速率約束和動(dòng)態(tài)特性并采用動(dòng)態(tài)控制分配策略的仿真結(jié)果,可以看出NTSM系統(tǒng)由于控制輸入指令存在嚴(yán)重抖振,在考慮執(zhí)行機(jī)構(gòu)位置、速率約束時(shí),氣動(dòng)舵與直接力裝置難以產(chǎn)生相應(yīng)的舵偏角和直接力,因此無(wú)法實(shí)現(xiàn)對(duì)過(guò)載的精確跟蹤。NFTSM系統(tǒng)控制輸入平滑無(wú)抖振,通過(guò)與動(dòng)態(tài)控制分配策略相結(jié)合,既考慮了氣動(dòng)舵和直接力裝置的位置、速率約束和動(dòng)態(tài)特性,又能實(shí)現(xiàn)對(duì)過(guò)載的快速精確跟蹤。圖9為所設(shè)計(jì)復(fù)合控制系統(tǒng)存在d=1000sin(100t)Nm的干擾力矩,并且氣動(dòng)參數(shù)分別向上和向下攝動(dòng)50%時(shí)的仿真曲線,可以看出,當(dāng)存在參數(shù)攝動(dòng)和外部擾動(dòng)時(shí),復(fù)合控制系統(tǒng)仍然能夠?qū)崿F(xiàn)對(duì)過(guò)載的快速精確跟蹤,說(shuō)明所設(shè)計(jì)復(fù)合控制系統(tǒng)品質(zhì)良好,具有很強(qiáng)的魯棒性。 圖9 過(guò)載隨時(shí)間變化曲線Fig.9 Curve of the change ofoverload 針對(duì)空空導(dǎo)彈的復(fù)合控制問(wèn)題,提出一種基于非奇異快速終端滑模和動(dòng)態(tài)控制分配技術(shù)的復(fù)合控制策略。非奇異快速終端滑模方法適用于存在參數(shù)攝動(dòng)及外部擾動(dòng)大的系統(tǒng)并具有較快的跟蹤誤差收斂速度;動(dòng)態(tài)控制分配技術(shù)在基于執(zhí)行機(jī)構(gòu)位置速率約束的基礎(chǔ)上考慮執(zhí)行機(jī)構(gòu)動(dòng)態(tài)特性對(duì)控制量進(jìn)行分配,仿真結(jié)果表明,依靠二者的協(xié)調(diào)控制,既可以實(shí)現(xiàn)過(guò)載的快速精確跟蹤,又可以改善空空導(dǎo)彈的響應(yīng)特性。 [1]KevinAWise,SavidJBroy.AgileMissileDynamicandControl[J].JournalofGuidance,Control,andDynamics,1998,21(3). [2]KMenon,VRIragavarapu.Adaptivetechniquesformultipleactuatorblending[C]//.AIAA-98-4494, 1998. [3]WANGYu-hang,YAOYu,BIYong-tao.LateralThrustandAerodynamicsBlendedControlSystemDesignBasedonAutoDisturbanceRejectionController[J].JournalofAstronautics,2009,30(4):1544-1550. [4]FengY,YuX,ManZ.Non-singularAdaptiveTerminalSlidingModeControlofRigidManipulators[J]. 2002, 38(12):2159-2167. [5] 李升波,李克強(qiáng),王堅(jiān)強(qiáng),等. 非奇異快速的終端滑模控制方法 [J]. 信息與控制, 2009, 38(1):1-8. [6] 畢永濤,賀風(fēng)華,姚郁. 敏捷導(dǎo)彈直接側(cè)向力與氣動(dòng)力復(fù)合控制策略 [J]. 吉林大學(xué)學(xué)報(bào),2011, 41(2):590-596. [7]RidgelyDB,DrakeD,TriplettI.Dynamiccontrolallocationofamissilewithtailsandreactionjets[C]//.AIAA,SouthCarolina,American, 2007. [8]OlaHarkegard.DynamicControlAllocationUsingConstrainedQuadraticProgramming[J].JournalofGuidance,Control,andDynamics,2004,27(6):1028-1034. Design of Blended Lateral Thrust and Aerodynamic Control System Based on Terminal Sliding Mode ZHAO Yu-jie, LIAO Zhi-zhong, DUAN Chao-yang, ZHANG Gong-ping (China Airborne Missile Academy,Luoyang 471009,China) A control strategy is proposed for the air-to-air missile with the blended lateral thrusters and aerodynamic surface control based on the nonsingular fast terminal sliding mode control(NFTSM) and the dynamic control allocation. A NFTSM controller is designed using the longitudinal dynamic model of the air-to-air missile to obtain the control moments required by the overload of the missile. The required control moments are mapped into the respective control commands on the aerodynamic deflector and the thrust engine array using the dynamic control allocation to realize the fast and the accurate tracking of the overload of the missile. The proposed blended control strategy can fast track the overload command accurately, proving a basis for the design of air-to-air missile with lateral thrust and aerodynamic control. Blended lateral thrust and aerodynamic compound control; Nonsingular fast terminal sliding mode; Dynamic allocation;Control moment 2014 - 11 - 16; 2015 - 01 - 10。 趙玉杰(1990 - ),男,碩士研究生,主要從事導(dǎo)航制導(dǎo)與控制方面的研究。 E-mail: zhaoyujie9009@163.com TJ765.2 A 2095-8110(2015)03-0049-06






3 仿真結(jié)果及分析


4 結(jié)論
猜你喜歡
河北畫報(bào)(2020年8期)2020-10-27 02:54:06
現(xiàn)代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
電子制作(2019年19期)2019-11-23 08:41:36
電子制作(2019年15期)2019-08-27 01:11:50
電子制作(2019年7期)2019-04-25 13:18:16
藝術(shù)啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
商周刊(2017年26期)2017-04-25 08:13:04
