基于VC++的脈沖多普勒雷達解距離模糊模塊仿真*
2015-03-15 03:04:14盧道偉李興民
艦船電子工程 2015年12期
盧道偉 李興民
(92941部隊93分隊 葫蘆島 125000)
?
基于VC++的脈沖多普勒雷達解距離模糊模塊仿真*
盧道偉 李興民
(92941部隊93分隊 葫蘆島 125000)
文章闡述了脈沖多普勒雷達解距離模糊的作用和基本原理,說明了解距離模糊的一般流程,在建立脈沖多普勒雷達(PD雷達)仿真系統的實際需求背景下,利用Microsoft Visual C++開發平臺,采用余數查找表法對多種PRF解距離模糊模塊進行了仿真實現,并對仿真模塊進行了驗證。
VC++; 脈沖多普勒雷達; PRF; 解距離模糊; 仿真
Class Number TP391.9
1 引言
眾所周知,雷達的最大單值測距范圍由其脈沖重復周期Tr決定。為保證單值測距,通常應選取
(1)
式中Rmax為被測目標的最大作用距離。
但有時雷達脈沖重復頻率(Pulse Repetition Frequency,PRF)的選擇不能滿足單值測距的要求,例如脈沖多普勒雷達(以下簡稱PD雷達),這時目標回波對應的距離R為
(2)
式中m為正整數,tR為測得的回波信號與發射脈沖間的時延。這時將產生測距模糊,為了得到目標的真實距離R,必須判明式中的模糊值m[1~3]。
本文在建立PD雷達仿真系統的實際需求背景下,利用Microsoft Visual C++開發平臺,采用余數查找表法對多種PRF解距離模糊模塊進行仿真實現,并對仿真模塊進行驗證。
2 多種PRF解距離模糊原理
先討論用雙重高PRF判測距模糊的原理。
設重復頻率分別為fr1和fr2,它們都不能滿足不模糊測距的要求,但具有公約頻率fr[4~5]:
(3)
式中,N和a為正整數,常選a=1,使N和N+a為互質數。fr的選擇應保證不模糊測距。
雷達以fr1和fr2的PRF交替發射脈沖信號。通過記憶重合裝置,將不同的fr發射信號進行重合,重合后的輸出是重復頻率fr的脈沖串。同樣也可得到重合的接收脈沖串,二者之間的時延代表目標的真實距離如圖1所示。

圖1 雙重高重復頻率測距
以二重PRF為例:
(4)
式中,n1和n2分別為用fr1和fr2測距時的模糊數。當a=1時,n1和n2的關系可能有兩種,即n1=n2或n1=n2+1,此時可算得
(5)
或
(6)
如果按式(5)算出tR為負值,則應采用式(6)。
如果采用多個高PRF測距,就能給出更大的不模糊距離,同時也可兼顧跳開發射脈沖遮蝕的靈活性。
3 解距離模糊仿真模塊的實現
該仿真模塊在深入理解多脈沖重頻解距離模糊原理的基礎上,采用余數查找表法,在多重PRF中選擇三重PRF的模糊距離之差來解距離模糊[6~7]。
由前面論述可知,距離模糊是由目標距離大于在某PRF上的不模糊距離引起的。解模糊問題實質上屬于數論中的一次同余方程組的求解問題,基于適應性和計算量上的考慮,本仿真模塊采用余數查找表法來實現。
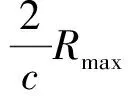
余數查找表法是用在各脈沖重復周期PRI(PRF的倒數)上測量得到的目標模糊距離,即目標真實距離用各PRI對應的距離求模后得到的余數,用此余數之差(可為負值)進行解模糊[8~10]。此方法是選擇一種PRI的余數作為基準,將其它各PRI上的余數與基準余數之差做成查找表。其原理如圖2所示。
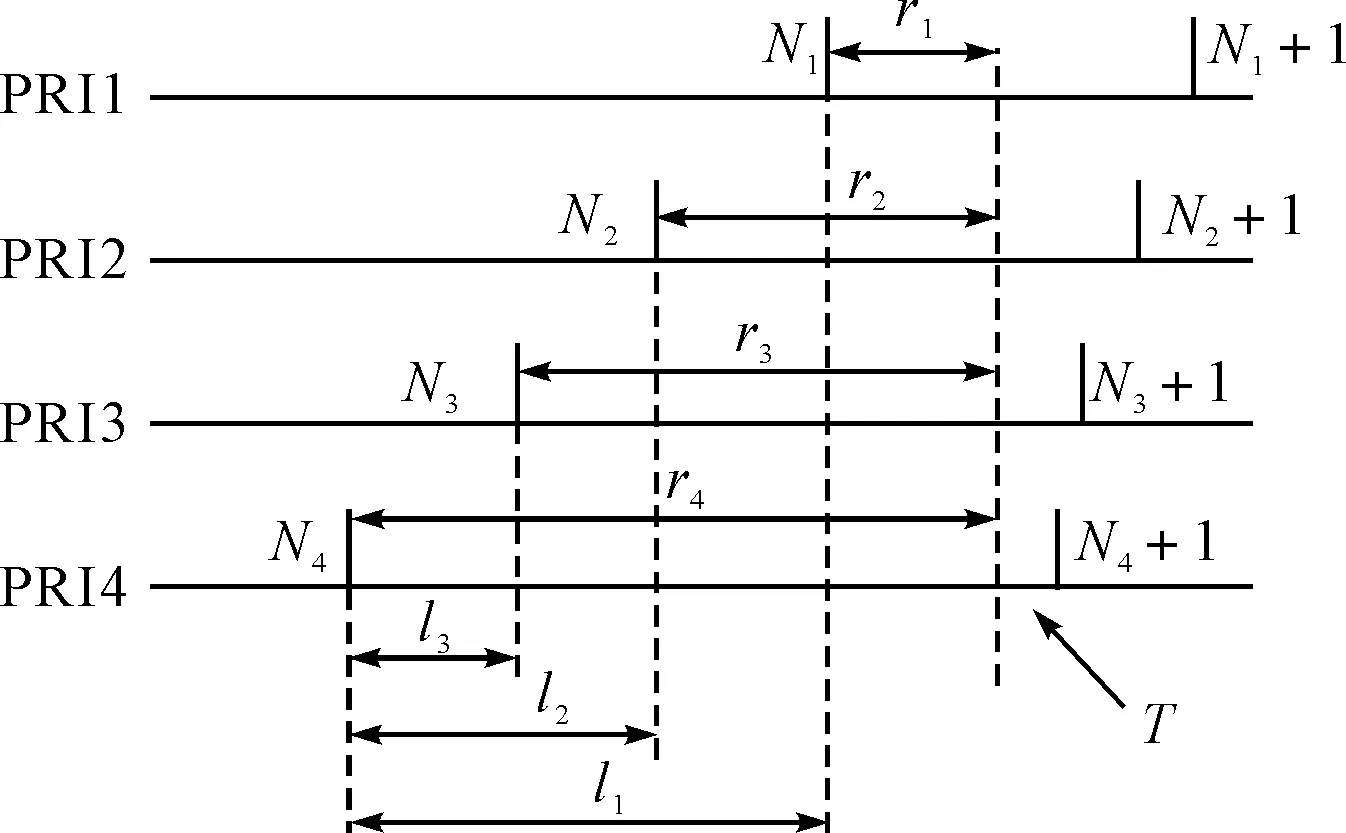
圖2 余數查找表法原理圖
圖2所示的是選擇四重PRI的情況:以PRIi表示脈沖重復周期,當目標處于某距離單元T時,它在各個PRI上的余數ri可由式(7)計算:
ri=T-Ni·PRIi=Tmod(PRIi)
(7)
式中,i=1,2,3,4,Ni為模糊數,mod(·)表示求模運算。若以第四種重周期作為基準周期,則查找表內存儲的表值為
li,k=ri-r4,i=1,2,3
(8)


(9)
(10)
RT=(NkTk+r4)·ΔR
(11)
ΔR為距離分辨率。在采用多重PRF解距離模糊時,系統的最大不模糊距離的確定公式如下:
(12)
式中TG為距離門寬度,C為光速,LCM(m1,m2,…,mi)為m1,m2,…,mi的最小公倍數,m1,m2,…,mi為在各重PRF上的距離門個數,i為解距離模糊采用的PRF重數。
根據PD雷達仿真系統課題的需求,在MPRF模式下,雷達的最大作用距離為120km,距離門寬度為1μs,八重PRF(各種PRF的距離門個數參見本章搜索時序模塊)中三重PRF上的距離門個數的最小公倍數為LCM(m1,m2,…,mi)=85470,其中m1=74,m2=70,m3=66,由此根據式(10)可得采用三重PRF解模糊時的最大不模糊距離為1282km。

圖3 解距離模糊模塊運行流程圖
圖3中的函數1生成余數查找表的流程圖如圖4所示。
圖3中函數2解距離模糊的流程圖如圖5所示。
4 對解距離模糊仿真模塊的測試
通用化仿真設計實現后,得到解距離模糊仿真模塊的輸入/輸出如表1和表2所示。

表1 解距離模糊仿真模塊輸入表
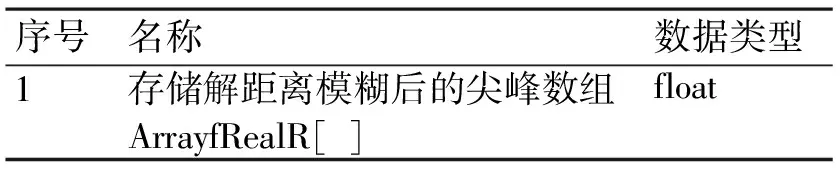
表2 解距離模糊仿真模塊輸出表
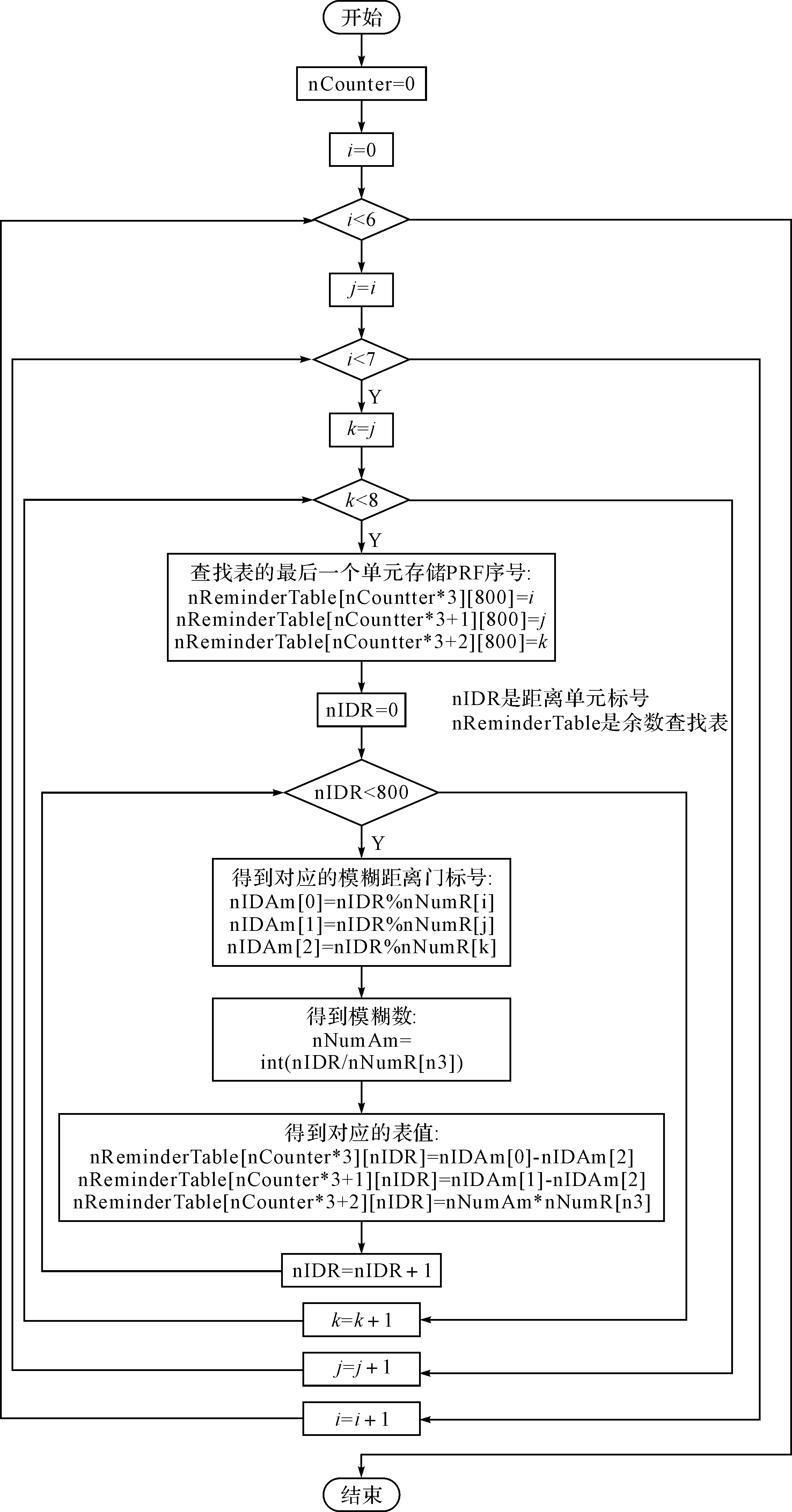
圖4 生成余數查找表流程圖
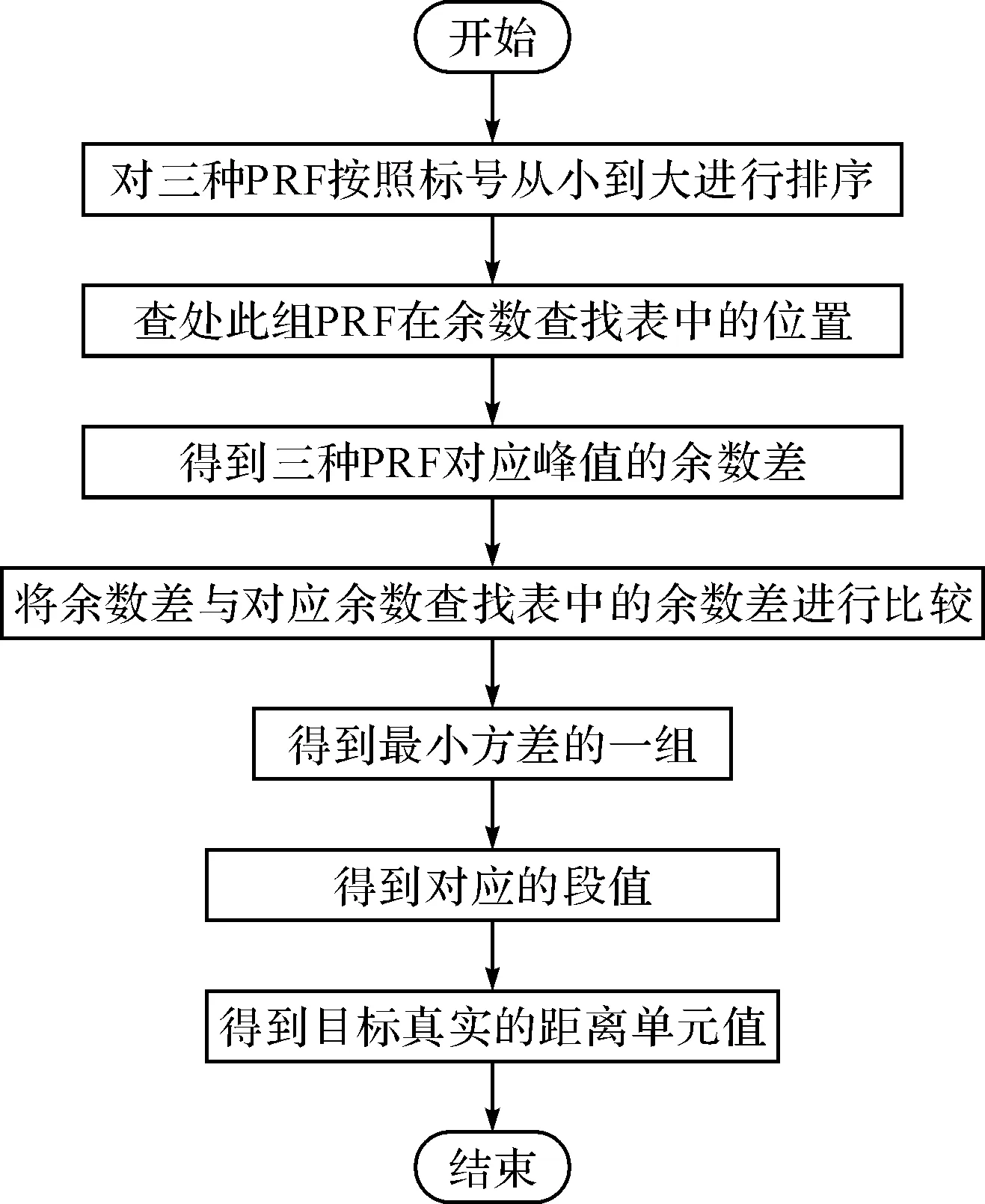
圖5 解距離模糊流程圖
將該仿真模塊在Microsoft Visual C++開發平臺下以動態鏈接庫的形式加載到PD雷達仿真系統中,設置了三個目標進行測試,雷達運動平臺參數和目標參數如表3和表4所示。
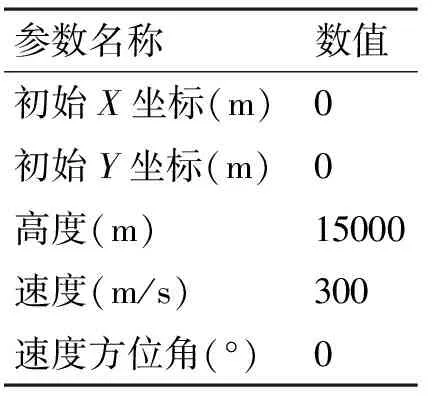
表3 雷達運動平臺參數
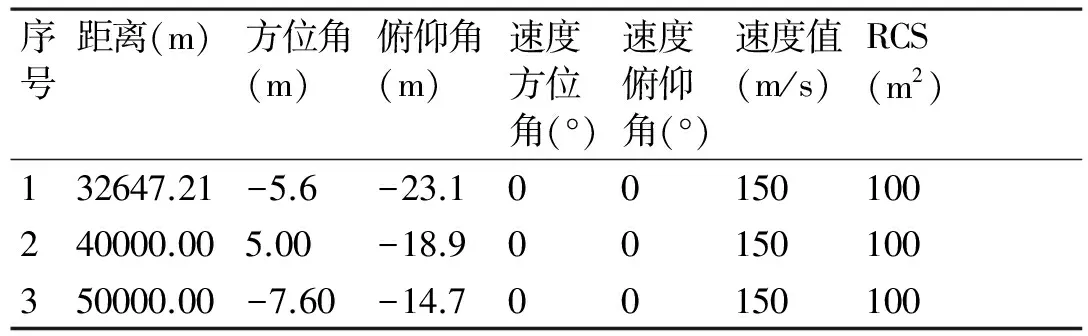
表4 目標參數(相對坐標系)
運行PD雷達仿真系統,記錄下經解距離模糊模塊處理后的相關數據,得到結果如下:
1) 目標1:
從錄取的數據結果來看,目標1于第26個TOT(對應仿真時間1.394s)被錄取,經過距離解模糊之后得到目標1的真實距離單元是217,一個距離單元是150m,所以目標1解模糊之后的距離是217×150=32550m,而由表3和表4中載機和目標的相關參數可以算出目標1此時的理論距離是32460m,兩者的誤差是32550-32460=90m,誤差小于150m。
2) 目標2:
從錄取的數據結果來看,目標2于第39個TOT(對應仿真時間2.0904s)被錄取,經過距離解模糊之后得到目標2的真實距離單元是265,一個距離單元是150m,所以目標1解模糊之后的距離是265×150=39750m,而由表3和表4中載機和目標的相關參數可以算出目標1此時的理論距離是39700m,兩者的誤差是39750-39700=50m,誤差小于150m。
3) 目標3:
從錄取的數據結果來看,目標3于第49個TOT(對應仿真時間2.626s)被錄取,經過距離解模糊之后得到目標3的真實距離單元是331,一個距離單元是150m,所以目標1解模糊之后的距離是331×150=49650m,而由表3和表4中載機和目標的相關參數可以算出目標1此時的理論距離是49620m,兩者的誤差是49650-49620=30m,誤差小于150。
由上述結果可知,解距離模糊仿真模塊是正確的。
5 結語
PD雷達工作在中脈沖重頻(MPRF)或者高脈沖重頻(HPRF)模式下時,很容易出現測距模糊現象。本文在深刻理解解距離模糊工作原理的基礎上,利用Microsoft Visual C++開發平臺,采用余數查找表的方法實現了解距離模糊仿真模塊,并用動態鏈接庫的形式對仿真模塊進行封裝。最后,在PD雷達仿真系統中對解距離模糊仿真模塊進行了驗證,證實了該模塊算法正確,具有執行效率高、接口正確、通用化性能好的優點。
[1] 丁鷺飛,等.雷達原理[M].北京:電子工業出版社,2002:170-199.
[2] 承德寶.雷達原理[M].北京:國防工業出版社,2008:226-231.
[3] [美]Merrill I, Skolnik.雷達手冊[M].北京:電子工業出版社,2010:135-139.
[4] [美]G. V. 莫里斯,等.機載脈沖多普勒雷達[M].航空工業出版社,1990:97-103.
[5] [美]Bassem R. Mahafza,等.雷達系統設計MATLAB仿真[M].航空工業出版社,2009:214-217.
[6] 高烽.多普勒雷達導引頭信號處理技術[M].北京:國防工業出版社,2001:115-118.
[7] 張賢達.現代雷達信號處理[M].北京:清華大學出版社,1995:86-89.
[8] 王秀春.論現代機載PD火控雷達技術[J].現代雷達,2001,4(23):2-3.
[9] 高愛麗.脈沖多普勒雷達的數據處理仿真[D].成都:電子科技大學,2006:52-58.
[10] 毛士藝,等.脈沖多普勒雷達[M].北京:國防工業出版社,1990:223-229.
Simulation of Solving the Range Ambiguty in Pulse Doppler Radar Based on VC++
LU Daowei LI Xingmin
(Unit 93, No. 92941 Troops of PLA, Huludao 125000)
This paper expatiates the principle of solving the range ambiguty and its function in pulse Doppler radar, gives the process of solving the range ambiguty, using the Microsoft Visual C++ developing platform and the method of remainder finding table to simulate the solving the range ambiguty under the requirement of building PD radar simulation system, and tests the Solving the Range Ambiguty Module.
VC++, pulse Doppler radar, PRF, solving the range ambiguty, simulation
2015年6月3日,
2015年7月24日
盧道偉,男,碩士,工程師,研究方向:導彈武器系統總體。李興民,男,高級工程師,研究方向:目標探測與制導控制。
TP391.9
10.3969/j.issn.1672-9730.2015.12.023