一種靜止同步補償器的滑模控制研究
2015-03-15 11:08:50易志威
通信電源技術 2015年1期
易志威,張 敏
(湖南科技大學信息與電氣工程學院,湖南湘潭411201)
靜止同步補償器(簡稱STATCOM)在無功補償領域應用得非常廣泛[1]。這種補償器(STATCOM)是無功補償技術的主力軍。STATCOM的優點在于能夠克服傳統無功補償裝置以及諧波治理裝置所具有的缺點,更好地實現了動態無功補償,為電力網絡和用電負荷提供了保障。STATCOM實際上是以瞬時無功功率的概念為基礎,由自換相逆變器和小容量儲能元件構成的無功補償裝置[2]。
實際上有兩種不同的STATCOM,一種是電壓源逆變型(VSI)的STATCOM,另一種是電流源逆變型(CSI)的STATCOM[3]。現在應用最廣泛的還是電壓源逆變型的STATCOM。目前,針對STATCOM,一些業內學者研究了較為先進的控制方法,其中就有文獻[4]的模糊PID控制,以及文獻[5]的通過極點配置的反饋線性化。而本文將對靜止同步補償器進行一種雙冪次趨近律滑模控制的研究。
滑模控制還有另外一個名字,即變結構控制。歸根到底它也是非線性控制方法中的一種,具有控制的不連續性特點。這種方法最大的優點是滑動模態的設計與對象參數及擾動無關,物理實現簡單,響應快速。故本
文將采用一種滑模控制來對靜止同步補償器進行研究。
1 STATCOM的建模分析
在圖1所示的STATCOM中直流電容C的作用是為逆變提供穩定的直流電壓,需從電網吸收部分能量,以便維持自身電壓穩定,交流側電抗L的作用是對STATCOM發出的無功電流進行濾波;R為回路等效電阻。由于是并聯型裝置,相比串聯型無功補償裝置,它的安裝更加靈活,損耗更小[6]。

圖1 STATCOM電路結構原理圖
根據圖1寫出STATCOM三相KVL方程組:

由能量守恒關系可以得出:

用Park變換將前面的式子變換到同一坐標系下,將式(1)和式(2)重寫為:
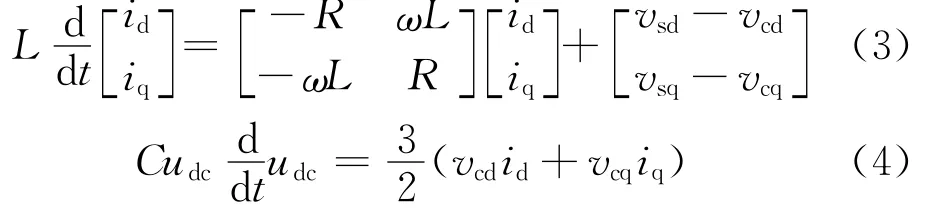
建立dq坐標系,整理得:

轉換為矩陣,得到數學模型[7]

2 無功電流檢測
STATCOM是一種動態補償裝置,無功電流檢測環節對其而言是尤為重要的。它對檢測的靈活性、快速性、準確性有一定的要求。在無功電流檢測環節采用的是ip、iq檢測法[8],如圖2所示。

圖2 i p、i q 檢測法
在ip、iq檢測法中,需要通過鎖相環(PLL)和正余弦信號發生器來得到與A相電網電壓同相位的正余弦信號,如圖3所示。根據瞬時無功功率理論可知,應該通過PARK變換,把負載電流解耦成基波分量和諧波分量;斷開iq通道,得到的指令電流包含基波無功和諧波,經低通濾波器(LPF)濾波得出基波分量。
3 滑模控制的設計
滑模變結構(SMC)一般有以下幾種設計方法:
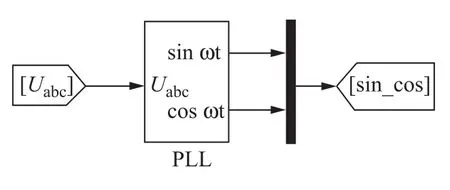
圖3 鎖相環模塊的設計
(1)常值切換控制:

(2)函數切換控制:

這是以等效控制ueq為基礎的形式。
(3)比例切換控制:

由于系統存在空間與時間上的延遲滯后,模態必然會出現一定程度的抖動,抖動的問題是影響滑模控制廣泛應用的主要障礙[9]。我國專家高為炳提出了一種趨近律的概念來抑制抖振。
高為炳教授提出了一系列趨近律的概念,例如等速趨近律、指數趨近律和冪次趨近律,消弱了系統的抖振,較好地實現了滑動模態。它們有著共同的特點:需要恰當地選取參數以確保趨近段特性。它們也有著各自的缺點,例如:等速趨近律趨近速度很慢;指數趨近律在接近模態時抖動是比較大的;冪次趨近律雖然整體性能較好,但是在狀態遠離模態的那一段,其速度過小,時間過長。
現采用一種雙冪次趨近律[10],比傳統趨近律擁有更好的運動品質和速度。如式(8)所示:

式中,α>1,0<β<1,k1>0,k2>0。在遠離滑動模態的那個階段,也就是當|σ|>1,式中的-k1|σ|αsgn(σ)這一部分起決定性作用;而當|σ|<1時,后面的-k2|σ|βsgn(σ)起決定性作用;而-k3σ2可以緩解系統在分界點的不連續性,削弱系統抖振。這幾部分的配合,良好地確保了滑模的運動品質。
4 仿真研究
為了驗證這種雙冪次趨近律滑模控制方法在STATCOM中的有效性,在Matlab/si mulink中搭建仿真模型,系統電壓定為380 V,設定STATCOM接入點的電壓為220 V,Udc為800 V,連接電阻R=0.05Ω,電感L=0.002 H,直流電容C=0.004 F。圖4所示為無功功率變化情況,從0.01 s到0.1 s之間,無功功率波動,而圖5則是負載電流在這段時間的變化曲線,在0.1 s后得到了有效的控制。
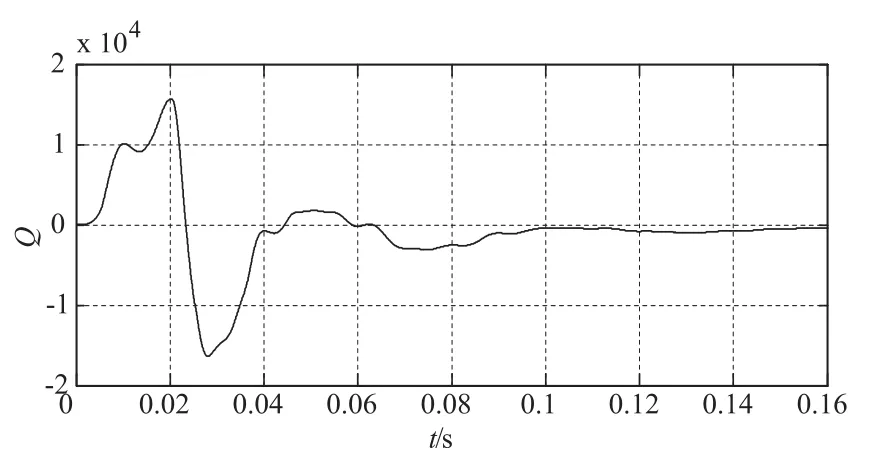
圖4 無功功率變化
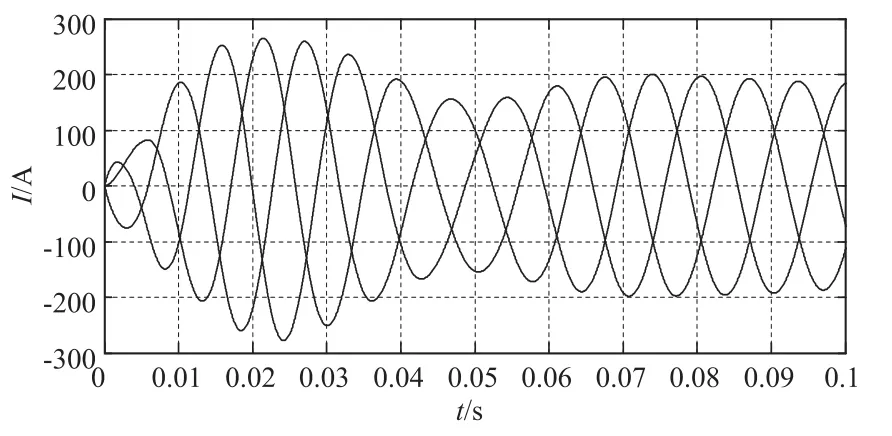
圖5 負載電流的變化
5 結束語
本文建立了STATCOM在ABC三相坐標系下的數學模型,再通過PARK變換將ABC三相坐標轉化為dq旋轉坐標,對無功電流進行快速準確的檢測。采用一種雙冪次趨近律滑模控制,在Matlab/si mulink中搭建仿真模型,仿真結果表明了該控制器的有效性,STATCOM的系統穩定性較好。
[1] 羅 安,歐劍波,唐 杰,等.補償配電網電壓不平衡的靜止同步補償器控制方法研究[J].中國電機工程學報,2009,29(6):55-60.
[2] 吳文輝,劉會金.靜止同步補償器(STATCOM)技術的研究現狀與發展[J].華東交通大學學報,2005,22(2):89-90.
[3] 王 剛.電流源逆變器型STATCOM技術研究[D].沈陽:沈陽工業大學,2007:6-7.
[4] 林媛媛.基于模糊PI控制器的STATCOM研究[D].遼寧:遼寧工程技術大學,2010.
[5] 朱 夏,王 杰.凸極式發電機勵磁與非理想STATCOM的協調控制[J].電網與清潔能源,2013,29(1):58-59.
[6] 佟 雷.基于滑模變結構控制的靜止同步補償技術研究[D].哈爾濱:哈爾濱工業大學,2011.
[7] 茅靖峰.靜止同步補償器滑模變結構控制及數字系統設計[D].鎮江:江蘇大學,2008.
[8] 李 超,公茂法,李嵐冰.ip-iq諧波和無功電流檢測法的改進及 MATLAB仿真[J].電氣時代,2014,4:78.
[9] 劉金琨.滑模變結構控制MATLAB仿真[M].北京:清華大學出版社,2012.
[10]張合新,范金鎖,孟 飛,黃金峰.一種新型滑模控制雙冪次趨近律[J].控制與決策,2013,28(2):290.
猜你喜歡
體育科技文獻通報(2022年3期)2022-05-23 13:46:54
天津外國語大學學報(2021年3期)2021-08-13 08:32:18
遼金歷史與考古(2021年0期)2021-07-29 01:06:54
科技傳播(2019年22期)2020-01-14 03:06:54
民用飛機設計與研究(2019年4期)2019-05-21 07:21:24
汽車工程學報(2017年2期)2017-07-05 08:13:02
廣西科技大學學報(2016年1期)2016-06-22 13:10:37
湖北經濟學院學報·人文社科版(2015年8期)2015-12-29 05:53:07
航空學報(2015年4期)2015-05-07 06:43:35
上海電機學院學報(2015年4期)2015-02-28 14:30:00
