三維網(wǎng)格模型數(shù)字水印算法改進(jìn)研究
2015-03-15 09:59:57李淑敬李林國(guó)
赤峰學(xué)院學(xué)報(bào)·自然科學(xué)版 2015年14期
關(guān)鍵詞:改進(jìn)
李淑敬,李林國(guó)
(阜陽(yáng)師范學(xué)院 信息工程學(xué)院,安徽 阜陽(yáng) 236041)
三維網(wǎng)格模型數(shù)字水印算法改進(jìn)研究
李淑敬,李林國(guó)
(阜陽(yáng)師范學(xué)院信息工程學(xué)院,安徽阜陽(yáng)236041)
摘要:數(shù)字水印技術(shù)可以有效地保護(hù)數(shù)字產(chǎn)品知識(shí)版權(quán),跟蹤打擊盜版行為,證明產(chǎn)品真?zhèn)危S著三維數(shù)據(jù)在信息領(lǐng)域的快速發(fā)展,研究數(shù)字水印技術(shù)前景廣闊.本文在數(shù)字水印研究現(xiàn)狀的基礎(chǔ)上,參考圖像數(shù)字水印技術(shù),對(duì)三維網(wǎng)格模型數(shù)字水印系統(tǒng)在改進(jìn)算法及實(shí)現(xiàn)方面進(jìn)行了研究.
關(guān)鍵詞:數(shù)字水印;三維網(wǎng)格模型;水印算法;改進(jìn)
項(xiàng)目來(lái)源:阜陽(yáng)師范學(xué)院教研一般項(xiàng)目
數(shù)字水印就是在數(shù)字圖像、音頻或視頻等數(shù)字產(chǎn)品中嵌入秘密信息,借此來(lái)加強(qiáng)對(duì)數(shù)字產(chǎn)品知識(shí)版權(quán)在保護(hù).包括圖像水印、視頻水印和三維模型水印三個(gè)類別.隨著科技的發(fā)展及計(jì)算機(jī)技術(shù)的進(jìn)步,相關(guān)專家學(xué)者對(duì)數(shù)字水印的技術(shù)研究也進(jìn)一步深入,相繼產(chǎn)生了網(wǎng)格模型、點(diǎn)云模型及參數(shù)曲面三種三維模型水印算法.在此基礎(chǔ)上,本文主要對(duì)三維網(wǎng)格模型數(shù)字水印算法改進(jìn)進(jìn)行了研究.
1 三維模型水印原理
首先設(shè)計(jì)3D模型和密匙,然后在數(shù)字產(chǎn)品中嵌入水印.水印嵌入前對(duì)水印數(shù)據(jù)進(jìn)行定義,利用算法通過媒介發(fā)送并生成3D模型,形成對(duì)數(shù)字產(chǎn)品知識(shí)版權(quán)的保護(hù).打開該數(shù)字產(chǎn)品需要借助密匙對(duì)水印算法進(jìn)行檢測(cè),進(jìn)而提取水印信息,恢復(fù)3D模型.三維模型水印嵌入與提取過程如下圖所示(圖1).

圖1三維模型水印嵌入與提取過程
三維模型具有如下特點(diǎn):首先是定點(diǎn)排列的無(wú)序性.圖像以掃描線順序排列,音頻和視頻按照時(shí)間先后順序排列,而CAD圖形數(shù)據(jù)則沒有固定的數(shù)據(jù)順序;其次是缺少自然的參數(shù)化分解方法.缺少視域分析所需要的參數(shù)化分解方法,所以不能直接運(yùn)用數(shù)學(xué)工具進(jìn)行分解操作;然后是表示方法不唯一.同一個(gè)三維模型,可以有不同的模型表現(xiàn)形式.但是,隱蔽性與魯棒性是三維模型數(shù)字水印需要最優(yōu)先考慮的基本條件.
2三維網(wǎng)格模型數(shù)字水印簡(jiǎn)析
三維網(wǎng)格模型是數(shù)字水印的最基礎(chǔ)形式,是進(jìn)行研究其他三維模型數(shù)字水印技術(shù)的基礎(chǔ).三維網(wǎng)格水印算法分為盲水印及非盲水印兩種形式:三維網(wǎng)格盲水印算法在水印提取時(shí)不需要原始模型信息,按照工作域可以分為空域算法和視域算法;非盲水印算法提取水印需要提供原始模型信息,同時(shí)還需要進(jìn)行重對(duì)齊、采樣等一系列預(yù)處理.對(duì)于具體的相關(guān)算法,由于各類科普文章都有所涉及,這里就不在一一列舉了.
3三維網(wǎng)格模型數(shù)字水印改進(jìn)算法
根據(jù)資料查閱發(fā)現(xiàn),一般三維模型數(shù)字水印算法與圖像數(shù)字水印算法基本類似,都是在空域操作實(shí)現(xiàn)的.相同點(diǎn)就是對(duì)模型定點(diǎn)坐標(biāo)進(jìn)行直接或間接的修改來(lái)嵌入水印.這樣計(jì)算量減小了,但魯棒性卻不高.針對(duì)這樣的問題,要增強(qiáng)對(duì)幾何攻擊的能力,就要提高魯棒性,進(jìn)行變換域算法操作.
3.1算法改進(jìn)原理
不需要對(duì)三維模型進(jìn)行重定位,只要在嵌入水印前對(duì)其進(jìn)行轉(zhuǎn)變到一個(gè)仿射不變空間的預(yù)處理即可.計(jì)算復(fù)雜且耗時(shí)的重定位處理就可以避免了.
假設(shè)三維模型由一個(gè)定點(diǎn)集合為V{Vi}及其連接的關(guān)系集合C組成,那么每個(gè)頂點(diǎn)Vi都會(huì)具有三維坐標(biāo)如:V1=(Xi,yi,Zi).接下來(lái)使其轉(zhuǎn)換到一個(gè)不變仿射空間,使其具備旋轉(zhuǎn)和尺度變換,但平移性恒定.具體操作過程為:
A.先將所有質(zhì)心計(jì)算出.方式為:
B.通過原三維模型定點(diǎn)Vi減掉質(zhì)心值使模型平移.方式為:
Vi'=(xi',yi',zi')=(xi-μx,yi-μy,zi-μz)
C.要保證變換后的三維模型的平移性恒定,需要再進(jìn)行主成份計(jì)算.T為頂點(diǎn)主要成分的特征矢量,通過頂點(diǎn)對(duì)應(yīng)坐標(biāo)協(xié)方差距陣求其最大值,使其與Z軸重合.協(xié)方差距陣方式為:
3.2嵌入水印過程
(1)首先將嵌入水印信息(或密匙)輸入偽隨機(jī)序列發(fā)生器并生成相對(duì)應(yīng)的二進(jìn)制序列(水印信息(或密匙)用K表示;水印序列長(zhǎng)度用Nw表示;水印生成算法用Wi和G表示).則其序列為:
W={wl,l=0,1,…,Nw-1},W=G(K)
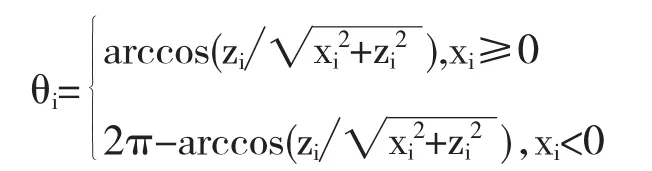
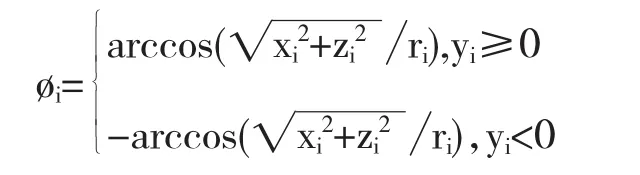
(2)其次將頂點(diǎn)坐標(biāo)(X1,y1,Z1)在網(wǎng)格頂點(diǎn)排成一維頂點(diǎn)序列時(shí)換成對(duì)應(yīng)的θi,?i,ri值,其對(duì)應(yīng)關(guān)系如圖3所示:
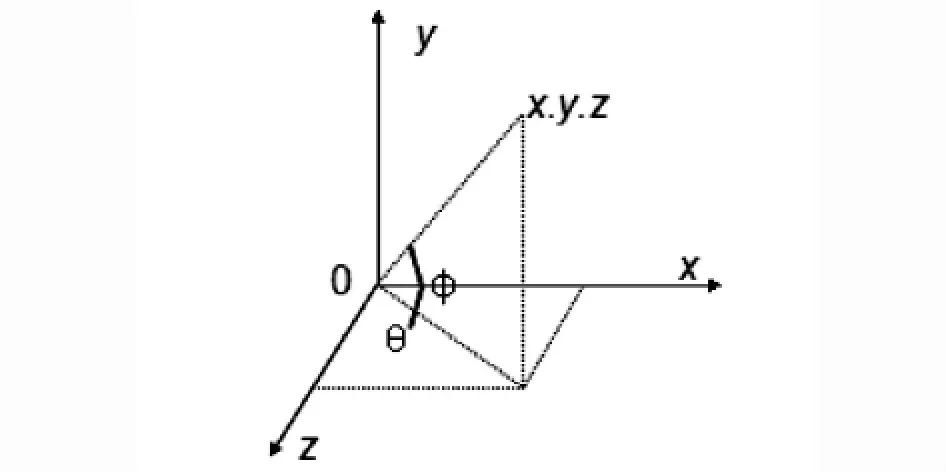
圖3 x.y.z與θ.φ.r關(guān)系圖
求θi,?i,ri值的公式為:
(3)求出ri值并歸一化順序排列,嵌入水印對(duì)象設(shè)為R={ri}.
(4)按順序?qū)={ri}分為S×Nw個(gè)元素(Nw個(gè)組,每組S個(gè)元素).則R={ril}.其中,i=0...Nw-1;l=0. ...S-1.ril作為嵌入單元進(jìn)行水印信息嵌入.過程如下:
先將單元ril進(jìn)行DFT變換,得到DFT的對(duì)應(yīng)系數(shù)Rlf,將一位水印信息Wl嵌入其中,公式如下:
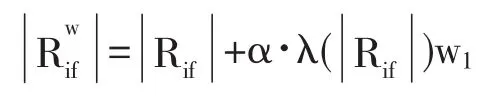
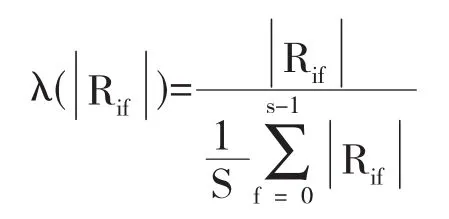
其中將Rwif進(jìn)行IDET即可得到含有水印信息的rw1j,對(duì)其進(jìn)行逆序得到rwi.由此可求得水印中間過渡頂點(diǎn)坐標(biāo).即:Xi'=riw×cos?i×sinθi.yi'=riw×sinθi. zi'=riw×cos?i×cosθi.對(duì)過渡頂點(diǎn)坐標(biāo)進(jìn)行預(yù)處理的逆變換,即可得到最終嵌入水印頂點(diǎn).
3.3水印提取
針對(duì)一些攻擊會(huì)改變?cè)季W(wǎng)格,加之重采樣算法復(fù)雜耗時(shí),本文介紹一種簡(jiǎn)單可行易操作的算法:將上面嵌入水印的順序倒過來(lái)重新操作,通過計(jì)算相關(guān)性系數(shù)Cor來(lái)對(duì)水印魯棒性進(jìn)行評(píng)價(jià)衡量.相關(guān)性系數(shù)Cor通過下式求得:
上式中Wd為提取出來(lái)的水印序列,W是原始水印序列是Wd序列各位的平均值是W序列各位的平均值,N是水印序列長(zhǎng)度.
如果提取出的水印與原始網(wǎng)格模型嵌入者所出示的水印的相關(guān)值大于所設(shè)定的閥值,則可證明嵌入者擁有版權(quán).反正則不能證明.
3.4實(shí)驗(yàn)結(jié)果
為了對(duì)本算法的可取性進(jìn)行驗(yàn)證,通過具體的3D圖像進(jìn)行了測(cè)試.實(shí)驗(yàn)?zāi)P陀许旤c(diǎn)1571個(gè),三角面2999個(gè).實(shí)驗(yàn)中生成的原始水印序列長(zhǎng)度為32,每一組定點(diǎn)數(shù)為48.分別通過簡(jiǎn)化攻擊、噪聲攻擊及剪切攻擊的測(cè)試對(duì)算法的魯棒性進(jìn)行了檢驗(yàn).
在進(jìn)行簡(jiǎn)化攻擊測(cè)試時(shí),對(duì)嵌有水印的3D圖像采用了StanMelax的算法進(jìn)行了簡(jiǎn)化,結(jié)果是頂點(diǎn)在受攻擊模型中雖然所剩不多,但其魯棒性在本算法中依然表現(xiàn)很強(qiáng).(見表1)

表1簡(jiǎn)化攻擊實(shí)驗(yàn)結(jié)果
在進(jìn)行噪聲攻擊實(shí)驗(yàn)時(shí),將均勻隨機(jī)噪音加入已加水印模型的頂點(diǎn)坐標(biāo),將噪聲矢量加入嵌入水印后的逐個(gè)頂點(diǎn).取噪聲向量的長(zhǎng)度與網(wǎng)格頂點(diǎn)與中心的距離比值為噪聲幅度.結(jié)果顯示,本算法在噪聲攻擊下仍有較強(qiáng)的魯棒性.(見表2)

表2噪聲攻擊實(shí)驗(yàn)結(jié)果
在進(jìn)行剪切攻擊實(shí)驗(yàn)時(shí),剪切百分比分別為原實(shí)驗(yàn)?zāi)P偷?0%,60%,30%和10%,結(jié)果顯示良好.(見表3)
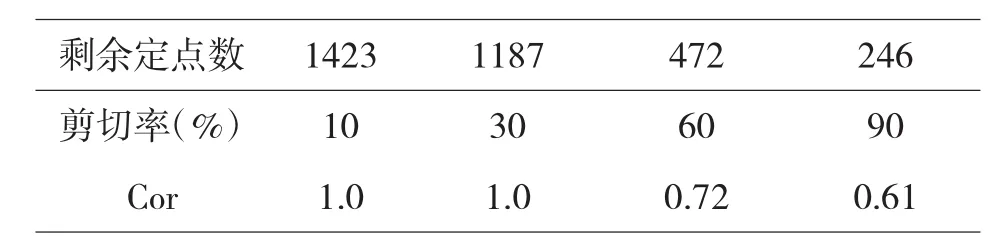
表3
4小結(jié)
本文在分析三維網(wǎng)格模型數(shù)字水印常見算法的基礎(chǔ)上,提出了一種新的改進(jìn)算法,對(duì)三維網(wǎng)格模型數(shù)字水印系統(tǒng)進(jìn)行了補(bǔ)充與完善.探索發(fā)現(xiàn)無(wú)止境,沒有最好,只要更好,希望以此能加強(qiáng)對(duì)3D數(shù)字產(chǎn)品版權(quán)的有效保護(hù).
——
參考文獻(xiàn):
〔1〕陳麗萍,孔祥增,姚志強(qiáng).基于幾何特征的三維模型雙重?cái)?shù)字水印算法[J].計(jì)算機(jī)系統(tǒng)應(yīng)用,2011(08).
〔2〕王新宇,詹永照.結(jié)合頂點(diǎn)趨勢(shì)檢測(cè)的三維模型數(shù)字水印算法[J].計(jì)算機(jī)應(yīng)用,2011(10).
〔3〕馮小青,潘志庚,李黎.面向3D網(wǎng)格模型的多重?cái)?shù)字水印算法[J].計(jì)算機(jī)輔助設(shè)計(jì)與圖形學(xué)學(xué)報(bào),2010(01).
〔4〕李軍.三維模型數(shù)字水印研究[J].湖北民族學(xué)院學(xué)報(bào)(自然科學(xué)版),2009(01).
基金項(xiàng)目:安徽省高等學(xué)校省級(jí)優(yōu)秀青年人才基金重點(diǎn)資助項(xiàng)目,項(xiàng)目名稱:三維網(wǎng)格模型盲水印技術(shù)研究(2013SQRL102ZD)項(xiàng)目名稱:面向軟件開發(fā)能力培養(yǎng)的《軟件工程》課程教學(xué)模式研究與實(shí)踐(2014JYXM41)
中圖分類號(hào):TP309.7
文獻(xiàn)標(biāo)識(shí)碼:A
文章編號(hào):1673-260X(2015)07-0025-03
猜你喜歡
電腦知識(shí)與技術(shù)(2016年24期)2016-11-14 01:49:16
文理導(dǎo)航(2016年30期)2016-11-12 15:19:07
經(jīng)營(yíng)者(2016年12期)2016-10-21 09:36:17
現(xiàn)代經(jīng)濟(jì)信息(2016年19期)2016-10-20 15:44:35
中國(guó)科技博覽(2016年18期)2016-10-19 07:16:43
商(2016年27期)2016-10-17 06:57:20
商(2016年27期)2016-10-17 05:02:12
大學(xué)教育(2016年9期)2016-10-09 08:09:53
科技視界(2016年20期)2016-09-29 13:36:14
企業(yè)導(dǎo)報(bào)(2016年8期)2016-05-31 18:48:53