半捷聯(lián)滾仰導(dǎo)引頭視線角速度重構(gòu)提取技術(shù)
2015-04-20 00:44:32趙桂軍呂鑒倬曹培培
制導(dǎo)與引信 2015年2期
孫 高, 趙桂軍, 呂鑒倬, 曹培培
(上海無線電設(shè)備研究所,上海200090)
0 引言
滾仰式導(dǎo)引頭以其獨(dú)特的極坐標(biāo)機(jī)械結(jié)構(gòu),實(shí)現(xiàn)俯仰框架-90°~+90°與滾轉(zhuǎn)框架0°~360°轉(zhuǎn)動(dòng)[1],視場(chǎng)覆蓋前半球,滿足了未來導(dǎo)彈導(dǎo)引頭大離軸角、大探測(cè)角的發(fā)展需求。
本文從滾仰導(dǎo)引頭框架結(jié)構(gòu)與運(yùn)動(dòng)形式出發(fā),對(duì)比了極坐標(biāo)和直角坐標(biāo)之間運(yùn)動(dòng)的差異,對(duì)由滾轉(zhuǎn)運(yùn)動(dòng)引起的視線角速度x 維的旋轉(zhuǎn)進(jìn)行了視線歸零重構(gòu),且在半捷聯(lián)穩(wěn)定方式下,采用彈體角速度和框架角速度融合的方式,完成了視線角速度y 維和z 維的提取,為滾仰捷聯(lián)式導(dǎo)引頭工程化應(yīng)用提供了理論分析。
1 滾仰導(dǎo)引頭視線角速度x 維旋轉(zhuǎn)問題
滾動(dòng)俯仰(滾仰式)半捷聯(lián)導(dǎo)引頭框架結(jié)構(gòu)為極坐標(biāo)形式,與傳統(tǒng)框架式導(dǎo)引頭的重要區(qū)別是其信息的測(cè)量和控制量的獲得是在不同坐標(biāo)系下描述的,由于存在描述坐標(biāo)系不統(tǒng)一的問題,測(cè)量給出的視線角速度也不同于傳統(tǒng)的框架式導(dǎo)引頭。因此,為了分析滾仰式導(dǎo)引頭的視線角速度,將滾仰式導(dǎo)引頭與傳統(tǒng)的偏航俯仰式(偏仰式)導(dǎo)引頭進(jìn)行對(duì)比,其坐標(biāo)關(guān)系如圖1所示。
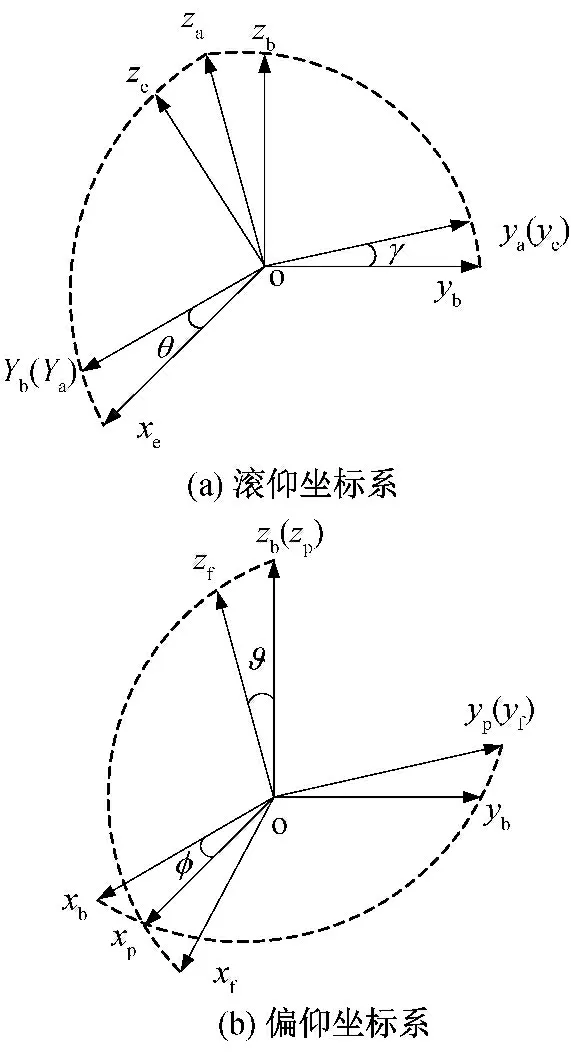
圖1 滾仰坐標(biāo)系與偏仰坐標(biāo)系
滾仰式導(dǎo)引頭坐標(biāo)系可分為滾轉(zhuǎn)坐標(biāo)系oxayaza,俯仰坐標(biāo)系oxeyeze,如圖1(a)所示,其中γ為滾轉(zhuǎn)角,θ為俯仰角。偏仰式導(dǎo)引頭坐標(biāo)系可分為偏航坐標(biāo)系oxpypzp,俯仰坐標(biāo)系oxfyfzf,如圖1(b)所示,其中φ 為偏航角,?為俯仰角。
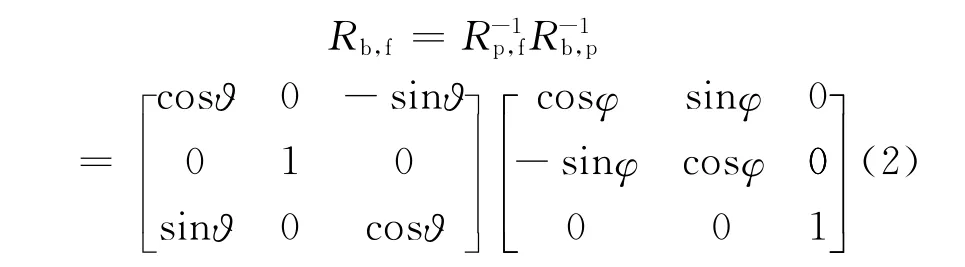
在導(dǎo)彈跟蹤目標(biāo)的過程中,滾仰式導(dǎo)引頭和偏仰式導(dǎo)引頭都可以通過執(zhí)行電機(jī)控制平臺(tái)框架運(yùn)動(dòng),使導(dǎo)引頭天線指向目標(biāo)。根據(jù)坐標(biāo)系之間的相對(duì)關(guān)系,可以得到滾仰式導(dǎo)引頭和偏仰導(dǎo)引頭各坐標(biāo)系之間的姿態(tài)變換矩陣,進(jìn)而可以確定由彈體坐標(biāo)系到滾仰坐標(biāo)系的坐標(biāo)變換矩陣Rb,e和由彈體坐標(biāo)系到偏仰坐標(biāo)系的坐標(biāo)變換矩陣Rb,f分 別 為

假設(shè)彈目視線上的單位向量為R =[1 0 0]T,則 可 以 根 據(jù) 坐 標(biāo) 變 換 矩 陣Rb,e和Rb,f得到該向量在彈體坐標(biāo)系下投影的兩種表達(dá)方式Rbe和Rbf,如式(3)和式(4)所示。

由于導(dǎo)引頭指向同一個(gè)目標(biāo),因此可得
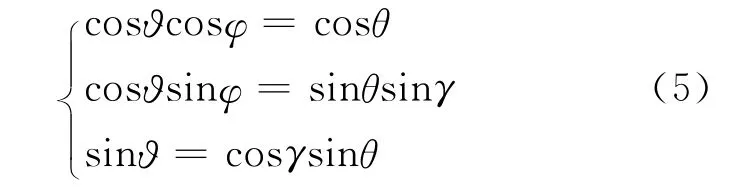
由式(5)可以求得滾仰導(dǎo)引頭框架角和偏仰導(dǎo)引頭框架角之間的關(guān)系為

在制導(dǎo)過程中,給出的視線角速度是在慣性坐標(biāo)系描述的。彈體坐標(biāo)系到慣性坐標(biāo)系的轉(zhuǎn)換由彈體姿態(tài)的歐拉角決定,為了對(duì)比偏仰和滾仰導(dǎo)引頭在指向目標(biāo)過程中的角速度,可將二者投影到彈體坐標(biāo)系,可得
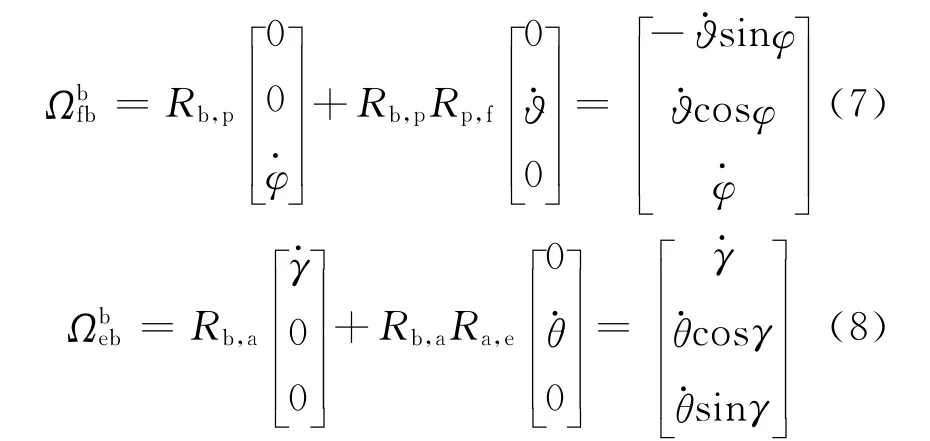
由式(6)、(7)和(8)可知,當(dāng)指向同一目標(biāo)時(shí),偏仰天線角速度和滾仰天線角速度不相等,即≠。
考慮到滾仰導(dǎo)引頭和偏仰導(dǎo)引頭機(jī)械結(jié)構(gòu)的差異性,將偏仰坐標(biāo)系與滾仰坐標(biāo)系相對(duì)于彈體坐標(biāo)系的角速度分別投影到各自的天線坐標(biāo)系,可得
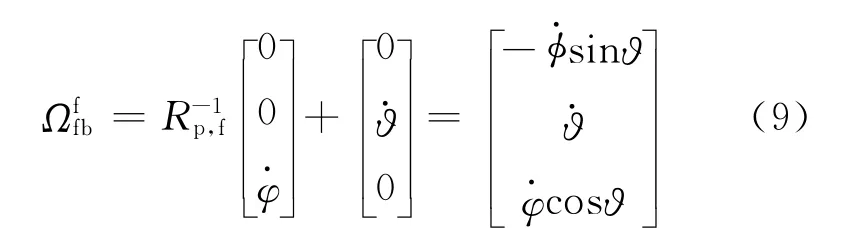

可見,由于偏仰導(dǎo)引頭和滾仰導(dǎo)引頭的框架結(jié)構(gòu)特性的差異,導(dǎo)致框架運(yùn)動(dòng)方式不同,在指向同一目標(biāo)的過程中,雖然二者在框架角度上有一定的對(duì)應(yīng)關(guān)系,但是各自天線坐標(biāo)系都存在繞x軸的旋轉(zhuǎn)運(yùn)動(dòng),即兩天線坐標(biāo)系的x 軸指向相同,但是y 軸和z 軸卻不重合,這導(dǎo)致了視線角速度的不相等。
2 視線角速度x 維歸零重構(gòu)
為了消除滾仰導(dǎo)引頭與偏仰導(dǎo)引頭角速度的差異,令兩個(gè)天線坐標(biāo)系繞自身x 軸旋轉(zhuǎn)的角速度為零,即令
將得到的天線角速度投影到彈體坐標(biāo)系下,可得
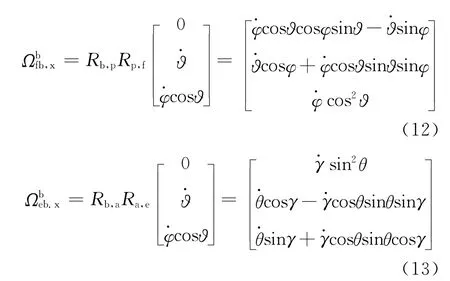
結(jié)合式(6)可知

實(shí)際中,導(dǎo)彈制導(dǎo)所需的視線角速度為慣性視線系的角速度,為了滿足實(shí)際制導(dǎo)中視線角速度的需求,必須采用重構(gòu)的方式提取滾仰導(dǎo)引頭x 維的視線角速度。慣性坐標(biāo)系、視線坐標(biāo)系和彈體坐標(biāo)系之間的關(guān)系如圖2所示,其中oxiyizi為 慣 性 坐 標(biāo) 系,oxbybzb為 彈 體 坐 標(biāo) 系,oxlylzl為視線坐標(biāo)系。
慣性系到視線系的坐標(biāo)轉(zhuǎn)換矩陣Ri,l可以用慣性系到中間坐標(biāo)系的轉(zhuǎn)換矩陣Ri,lm和中間坐標(biāo)系到視線坐標(biāo)系的轉(zhuǎn)換矩陣Rlm,l表示,采用視線高低角?l和視線方位角表示為
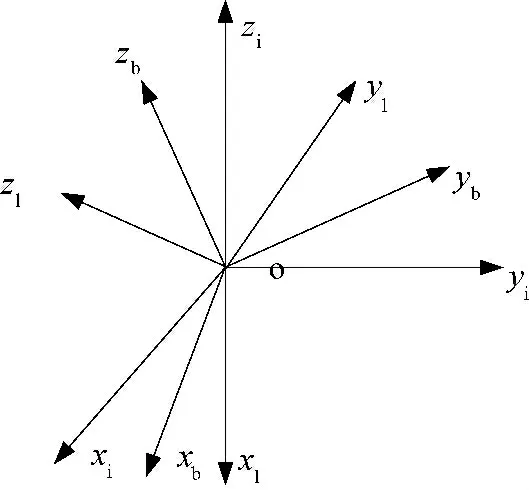
圖2 慣性坐標(biāo)系、視線坐標(biāo)系和彈體坐標(biāo)系的關(guān)系
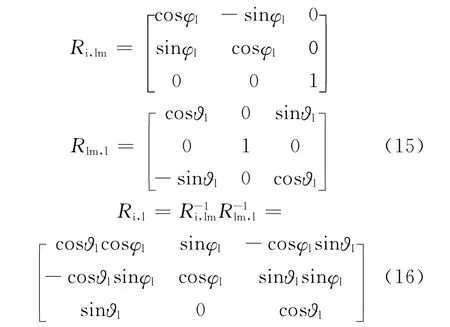
由慣性系到滾仰坐標(biāo)系的坐標(biāo)轉(zhuǎn)換矩陣Ri,e可以用彈體姿態(tài)角?b、ψb、γb和滾仰框架角γ、θ表示,可得

其中:

在不考慮跟蹤誤差時(shí),滾仰坐標(biāo)系的x 軸與視線系的x 軸重合,都指向同一目標(biāo)。因此,根據(jù)式(5)的推導(dǎo)方式,利用式(16)和式(17)可得

由圖2可以看出,視線坐標(biāo)系是由慣性坐標(biāo)系先以角速度φ·l 繞ozi軸旋轉(zhuǎn)φl(shuí) 角度(視線方位角),再以角速度?·l繞中間坐標(biāo)系oyl軸旋轉(zhuǎn)?l角度(視線高低角)得到。因此,視線角速度在中間坐標(biāo)系oxlm軸上的速度投影為零。
令滾仰坐標(biāo)系的慣性角速度為Ωe=[ΩexΩeyΩez]T,則可得
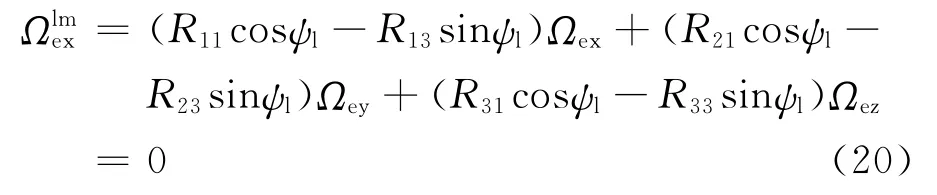
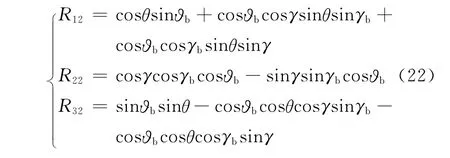
將式(19)代入式(20),求解得

其中:
3 半捷聯(lián)方式下視線角速度的提取
在完成滾仰導(dǎo)引頭慣性視線角速度x 維重構(gòu)的基礎(chǔ)上,必須實(shí)現(xiàn)對(duì)y 維和z 維的提取。在傳統(tǒng)速率陀螺穩(wěn)定方式下,可在滾仰導(dǎo)引頭內(nèi)框架上安裝兩軸速率陀螺測(cè)量Ωey和Ωez,而在半捷聯(lián)穩(wěn)定方式下[3],框架上沒有慣性器件,必須采用信息融合的方法完成視線角速度的提取。
半捷聯(lián)穩(wěn)定控制原理如圖3所示。因此,半捷聯(lián)方式下,框架視線慣性角速度是由彈體相對(duì)慣性空間角速度和框架相對(duì)彈體角速度通過一定的方式融合而成的。

圖3 半捷聯(lián)穩(wěn)定控制原理
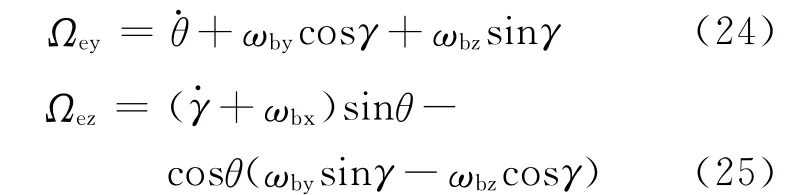
假設(shè)彈體相對(duì)于慣性空間的角速度為ωb=[ωbxωbyωbz]T,滾仰坐標(biāo)系相對(duì)于彈體坐標(biāo)系的框 架 角 速 度 為ωγ= [0 0]T和ωθ=[00]T。其中,彈體角速度一般可由捷聯(lián)陀螺或者慣導(dǎo)單元測(cè)量得到,而框架角速度可采用微分框架角位置信號(hào)的方法獲取。根據(jù)坐標(biāo)轉(zhuǎn)換矩陣可知,由彈體運(yùn)動(dòng)和框架運(yùn)動(dòng)共同引起的滾仰導(dǎo)引頭的天線坐標(biāo)系的角速度為

滾仰導(dǎo)引頭y 維和z 維的慣性視線角速度為
由此,可以得到半捷聯(lián)穩(wěn)定方式下,滾仰導(dǎo)引頭的慣性視線角速度為

4 結(jié)束語(yǔ)
本文從極坐標(biāo)系和直角坐標(biāo)系的結(jié)構(gòu)和運(yùn)動(dòng)形式出發(fā),分析了滾仰導(dǎo)引頭與偏仰導(dǎo)引頭視線角速度差異的原因,對(duì)x 維視線角速度進(jìn)行歸零重構(gòu),消除了滾仰視線角速度x 維的差異。在半捷聯(lián)穩(wěn)定方式下,根據(jù)半捷聯(lián)穩(wěn)定控制原理,結(jié)合捷聯(lián)陀螺測(cè)量信息和微分框架角位置信息,采用非線性坐標(biāo)變換的方法,完成了滾仰導(dǎo)引頭y 維和z 維的視線角速度提取。該滾仰導(dǎo)引頭視線角速度重構(gòu)提取技術(shù)為工程應(yīng)用提供了理論依據(jù)[4]。
[1] 王志偉,祁載康,王江.滾仰式導(dǎo)引頭跟蹤原理[J].紅外與激光工程,2008,37(2):274-277.
[2] 陳雨,趙剡,張同賀,等.滾仰式捷聯(lián)導(dǎo)引頭跟蹤原理與仿真[J].航空兵器,2010,(5):55-58.
[3] 楊寶慶,徐龍,姚郁.半捷聯(lián)式導(dǎo)引頭視線轉(zhuǎn)率提取算法[J].北京航空航天大學(xué)學(xué)報(bào),2011,37(7):839-843.
[4] 張靖男,趙興鋒,鄭志強(qiáng),等.戰(zhàn)術(shù)導(dǎo)彈制導(dǎo)率設(shè)計(jì)[J].航空兵器,2006,(3):3-6.