微創(chuàng)介入手術(shù)導(dǎo)管機(jī)器人系統(tǒng)自適應(yīng)模糊PID控制
2015-04-25 01:44:18趙希梅游健康劉浩李洪誼
機(jī)床與液壓 2015年9期
趙希梅,游健康,劉浩,李洪誼
(1. 沈陽工業(yè)大學(xué)電氣工程學(xué)院,遼寧沈陽110870;2. 中國科學(xué)院沈陽自動化研究所機(jī)器人學(xué)國家重點(diǎn)實(shí)驗(yàn)室,遼寧沈陽110016)
0 前言
目前,微創(chuàng)介入手術(shù)在治療心血管病中得到廣泛應(yīng)用。與傳統(tǒng)手術(shù)相比,具有出血少、創(chuàng)傷小、并發(fā)癥少、術(shù)后恢復(fù)快等優(yōu)點(diǎn)。然而人工介入手術(shù)也存在明顯的不足,例如,醫(yī)生長時間工作在射線環(huán)境中,危害自身健康,醫(yī)生的誤操作很容易導(dǎo)致血管穿孔,危害病人健康。隨著機(jī)器人技術(shù)的發(fā)展,將機(jī)器人技術(shù)與血管介入技術(shù)有機(jī)結(jié)合是解決上述問題的重要途徑。現(xiàn)在,國內(nèi)外已有相關(guān)的研究出現(xiàn)。郭書祥等[1-2]提出了一種新型的導(dǎo)管機(jī)器人操縱系統(tǒng),采用的是PID 控制;GANJI 等[3]進(jìn)行了心臟內(nèi)射頻消融導(dǎo)管的輸送實(shí)驗(yàn),系統(tǒng)控制方法為比例控制;PENNING 等[4-5]分別進(jìn)行了導(dǎo)管機(jī)器人系統(tǒng)的開環(huán)和閉環(huán)控制實(shí)驗(yàn),采用積分控制方法控制導(dǎo)管的位置。國內(nèi)也對導(dǎo)管輸送系統(tǒng)展開了相關(guān)的研究,系統(tǒng)的控制方法一般為開環(huán)或簡單的閉環(huán)[6-8]。
傳統(tǒng)的PID 控制方法已經(jīng)用于導(dǎo)管機(jī)器人控制系統(tǒng)中,但從手采用PID 控制不能很好地跟蹤主手的控制信號,有時會出現(xiàn)較大的超調(diào),存在安全隱患。由于介入手術(shù)中導(dǎo)管是柔性的設(shè)備,并且導(dǎo)管在血管中運(yùn)動存在血流的阻力、血管的摩擦力等環(huán)境因素,同時驅(qū)動力和位移存在時延效應(yīng)。因而建立包括變化的環(huán)境因素在內(nèi)的導(dǎo)管精確模型是非常困難的。而自適應(yīng)模糊PID 控制器動態(tài)性能好,不要求建立精確的數(shù)學(xué)模型,具有模糊控制的靈活性和適應(yīng)性強(qiáng)的特點(diǎn)以及PID 控制精度高的優(yōu)勢,正好適合該系統(tǒng)控制的需要,能夠提高導(dǎo)管機(jī)器人系統(tǒng)的跟蹤性能。
1 系統(tǒng)的動態(tài)模型
主從導(dǎo)管機(jī)器人系統(tǒng)示意圖如圖1 所示,由主手和從手兩部分組成。主手從手之間通過因特網(wǎng)連接。通過視覺反饋,醫(yī)生可以在手術(shù)室外操控主手,向從手發(fā)送指令,進(jìn)而控制從手操縱導(dǎo)管完成介入手術(shù)。利用主從機(jī)器人進(jìn)行介入手術(shù),可以避免醫(yī)生遭受X射線的輻射。
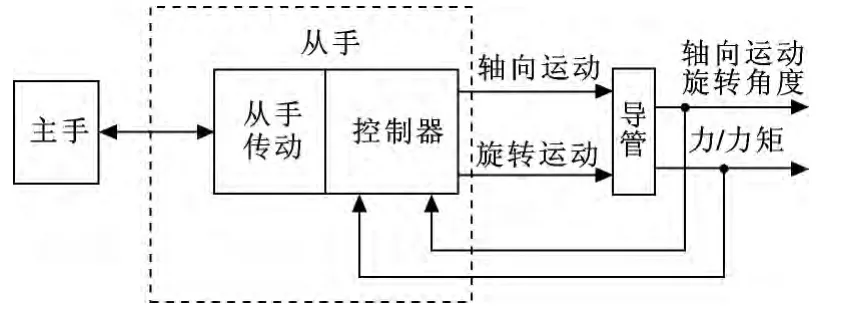
圖1 主從導(dǎo)管機(jī)器人系統(tǒng)示意圖
微創(chuàng)介入手術(shù)中,醫(yī)生通過對導(dǎo)管的推拉和旋轉(zhuǎn)操作,將其經(jīng)血管送到病灶處。從手部分有兩個自由度(軸向運(yùn)動和旋轉(zhuǎn)運(yùn)動):推拉和旋轉(zhuǎn)。軸向運(yùn)動由一個步進(jìn)電機(jī)驅(qū)動,旋轉(zhuǎn)運(yùn)動則采用直流電機(jī)驅(qū)動。兩個電機(jī)各采用一個編碼器來測量旋轉(zhuǎn)運(yùn)動的角度和軸向運(yùn)動的位移。兩個電機(jī)采用兩個測力裝置分別測量步進(jìn)電機(jī)輸出的力和直流電機(jī)輸出的力矩。以下將建立導(dǎo)管機(jī)器人軸向運(yùn)動和旋轉(zhuǎn)運(yùn)動的模型。
1.1 軸向運(yùn)動的動力學(xué)模型
軸向運(yùn)動采用步進(jìn)電機(jī)驅(qū)動,從手部分包括機(jī)械輸送機(jī)構(gòu)和導(dǎo)管。根據(jù)牛頓第二定律建立軸向運(yùn)動的動態(tài)模型[1]為:

式中:f(t)為步進(jìn)電機(jī)輸出的驅(qū)動力;x(t)表示導(dǎo)管軸向運(yùn)動的位移;是運(yùn)動的速度;m 表示運(yùn)動部分的質(zhì)量(主要包括電機(jī)與相關(guān)機(jī)械裝置的質(zhì)量,導(dǎo)管部分質(zhì)量相對很輕,可以忽略);c 為黏性阻尼系數(shù);k 是彈性系數(shù)。式(1)表示了驅(qū)動力和輸出位移之間的關(guān)系。它相當(dāng)于彈簧—物體—阻尼器組成的機(jī)械平移系統(tǒng)。令x1(t)=x(t),x2(t)=),則軸向運(yùn)動的狀態(tài)方程為:

1.2 旋轉(zhuǎn)運(yùn)動的動力學(xué)模型
旋轉(zhuǎn)運(yùn)動采用直流電機(jī)驅(qū)動機(jī)械旋轉(zhuǎn)機(jī)構(gòu),從而帶動導(dǎo)管運(yùn)動。對于旋轉(zhuǎn)運(yùn)動的動力學(xué)模型采用彈簧-質(zhì)量系統(tǒng)模型表示。其中質(zhì)量與軸向運(yùn)動模型中的相同。它相當(dāng)于一個機(jī)械轉(zhuǎn)動系統(tǒng),由慣性負(fù)載和阻尼器組成。這里只考慮了近似于線性系統(tǒng)的情況,沒有考慮電機(jī)運(yùn)轉(zhuǎn)時系統(tǒng)的各種摩擦、死區(qū)和時間延遲等造成非線性效應(yīng)以及實(shí)際存在的各種不確定性。這樣旋轉(zhuǎn)運(yùn)動動力學(xué)模型[2]為:


B1=
2 基于自適應(yīng)模糊PID 控制的導(dǎo)管機(jī)器人系統(tǒng)設(shè)計(jì)
在上節(jié)中,建立了從手導(dǎo)管驅(qū)動系統(tǒng)的軸向運(yùn)動和旋轉(zhuǎn)運(yùn)動的數(shù)學(xué)模型。但在建立模型的過程中,忽略了實(shí)際導(dǎo)管操作系統(tǒng)存在的許多非線性因素,如系統(tǒng)的死區(qū)、時滯效應(yīng)等諸多不確定性的因素對模型精度的影響。所以建立的模型只是近似條件下的理想模型,并不能精確地描述該系統(tǒng)。在導(dǎo)管操作過程中,需要實(shí)時改變控制器的參數(shù),減小或降低這些因素的影響。PID 控制器的參數(shù)選定后固定不變,而模糊控制能夠根據(jù)系統(tǒng)控制的需要,實(shí)時在線調(diào)整PID 控制器的參數(shù)。因此,文中采用自適應(yīng)模糊PID 控制方法控制機(jī)器人對導(dǎo)管進(jìn)行推拉和旋轉(zhuǎn)操作。
2.1 自適應(yīng)模糊PID 控制器設(shè)計(jì)
自適應(yīng)模糊PID 控制器以誤差e 和誤差的變化率ec 作為輸入變量,模糊化后,經(jīng)過模糊控制器的推理得到PID 參數(shù)的整定值Δkp、Δki、Δkd,實(shí)現(xiàn)PID 參數(shù)的實(shí)時自整定。誤差e 和誤差變化率ec 的模糊化后分別為E 和EC,輸出量為Δkp、Δki和Δkd,它們的論域均為[-3,3],隸屬度函數(shù)均為三角形。模糊子集均取為{NB,NM,NS,ZE,PS,PM,PB},分別表示負(fù)大、負(fù)中、負(fù)小、零、正小、正中、正大。各變量的模糊子集分布如圖2 所示。

圖2 模糊子集分布
自適應(yīng)模糊PID 控制的核心是建立控制規(guī)則。根據(jù)不同的誤差值和誤差變化值,通過實(shí)時調(diào)整控制參數(shù)來達(dá)到最佳的控制效果。根據(jù)PID 參數(shù)整定原則[9],得到表1 至表3 所示模糊控制規(guī)則[10]。

表1 Δkp 的模糊控制規(guī)則
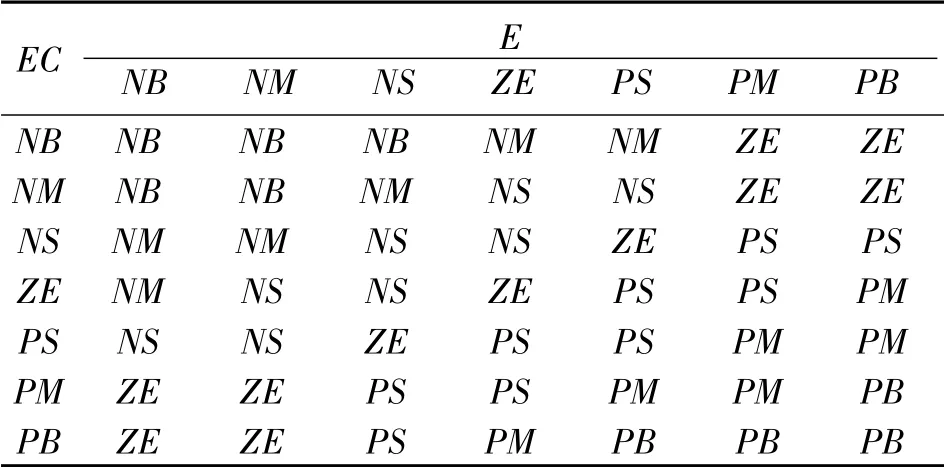
表2 Δki 的模糊控制規(guī)則
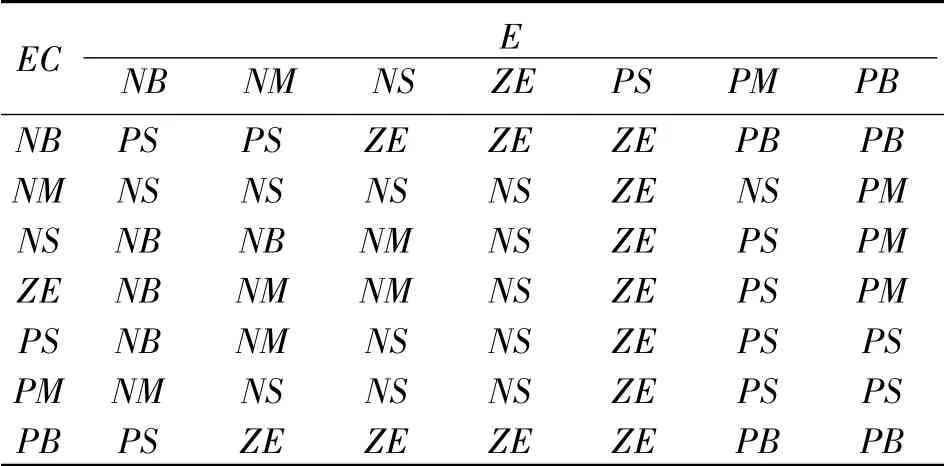
表3 Δkd 的模糊控制規(guī)則
模糊推理后需要把模糊量轉(zhuǎn)變?yōu)榫_量,即去模糊化。這里采用重心法來去模糊化。自適應(yīng)模糊PID控制器結(jié)構(gòu)如圖3 所示。
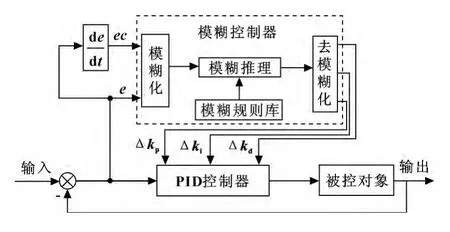
圖3 自適應(yīng)模糊PID 控制器結(jié)構(gòu)圖
2.2 主從導(dǎo)管機(jī)器人系統(tǒng)的自適應(yīng)模糊PID 控制
導(dǎo)管機(jī)器人系統(tǒng)對導(dǎo)管的推拉和旋轉(zhuǎn)操作是獨(dú)立進(jìn)行的,它們之間沒有耦合。因此,軸向運(yùn)動和旋轉(zhuǎn)運(yùn)動的控制是單獨(dú)進(jìn)行,需要兩個模糊PID 控制器。從手控制器接收到來自主手控制信號后,與反饋回來的信號 (導(dǎo)管的軸向運(yùn)動位移和旋轉(zhuǎn)角度)作差,再分別通過模糊PID 控制器給出合適的控制量,控制導(dǎo)管操作裝置帶動導(dǎo)管運(yùn)動。主從導(dǎo)管機(jī)器人系統(tǒng)的自適應(yīng)模糊PID 控制如圖4 所示。
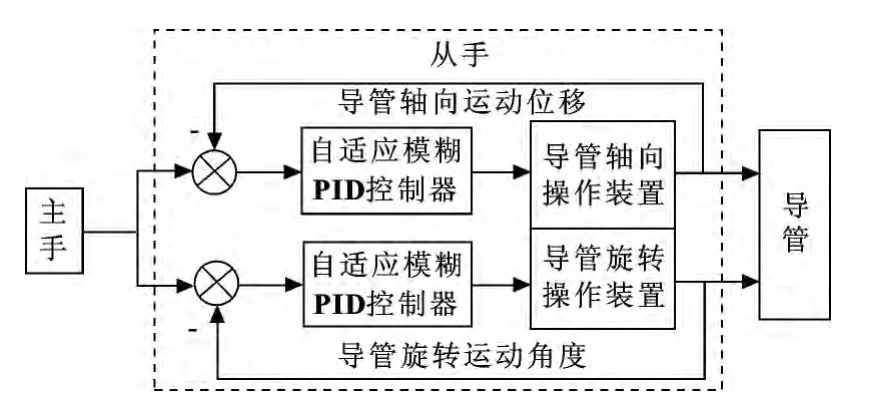
圖4 基于自適應(yīng)模糊PID 控制的主從導(dǎo)管機(jī)器人系統(tǒng)框圖
3 系統(tǒng)仿真分析
為了驗(yàn)證所設(shè)計(jì)的基于自適應(yīng)模糊PID 控制導(dǎo)管機(jī)器人系統(tǒng)性能,根據(jù)軸向運(yùn)動和旋轉(zhuǎn)運(yùn)動模型,對系統(tǒng)進(jìn)行仿真研究。其中,m = 1 kg,c = 0.04 N/ (m/s),k=2 N/m。軸向運(yùn)動中kp、ki和kd的初始值分別為500、15、28.5;旋轉(zhuǎn)運(yùn)動中kp、ki和kd的初始值分別為400、7、26。
系統(tǒng)軸向運(yùn)動的跟蹤曲線如圖5 所示。給定信號為主手給定的軸向移動的位移信號,輸出為從手移動的位移信號。在3 s 時加入幅值為0. 1 mm 的擾動信號,擾動放大部分如圖6 所示。系統(tǒng)旋轉(zhuǎn)運(yùn)動的跟蹤曲線如圖7 所示。輸入信號為主手給定的旋轉(zhuǎn)角度,輸出為從手端的旋轉(zhuǎn)角度。在3 s 時刻加入0. 1°的擾動信號,擾動放大部分如圖8 所示。

圖5 軸向運(yùn)動的跟蹤曲線
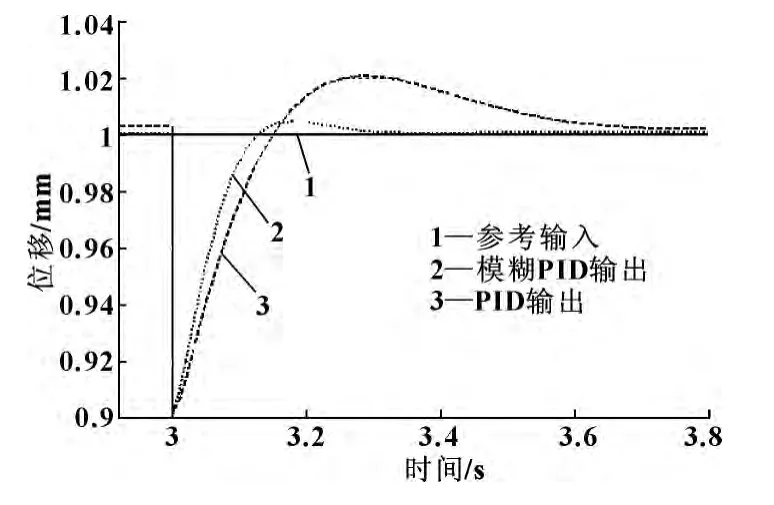
圖6 軸向運(yùn)動跟蹤曲線的局部放大圖
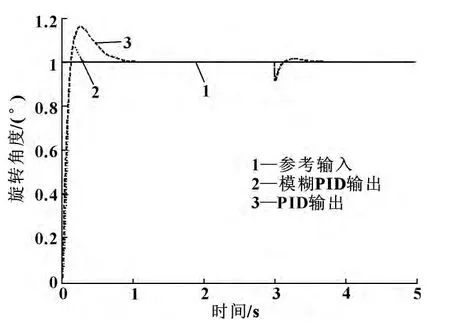
圖7 旋轉(zhuǎn)運(yùn)動的跟蹤曲線
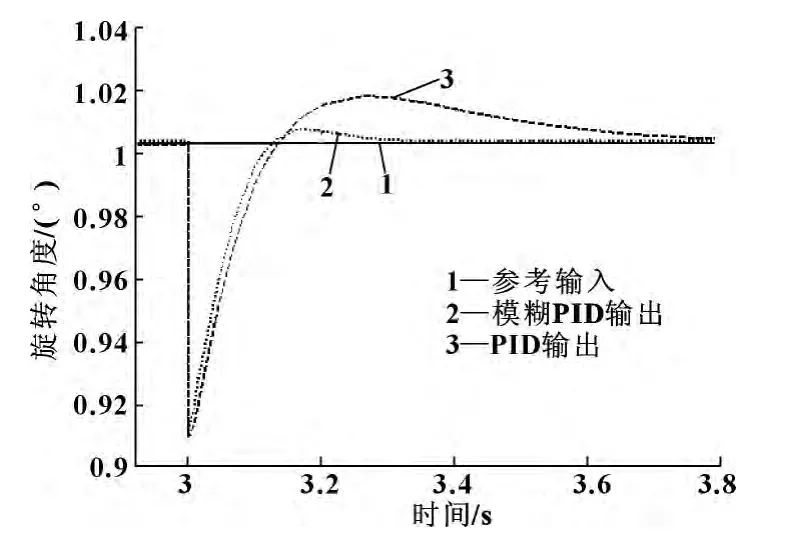
圖8 旋轉(zhuǎn)運(yùn)動曲線局部放大圖
從仿真結(jié)果可以看出,在軸向運(yùn)動和旋轉(zhuǎn)運(yùn)動中,自適應(yīng)模糊PID 算法在快速性、跟蹤誤差和抑制干擾方面均優(yōu)于PID 算法,跟蹤主手信號的能力明顯提高。在跟蹤誤差方面,所提出的控制算法動態(tài)跟蹤誤差小于PID 控制算法。在抑制干擾方面,該控制算法的魯棒性好于PID 控制算法。
4 結(jié)論
針對主從介入手術(shù)導(dǎo)管機(jī)器人系統(tǒng)中PID 控制存在的不足,建立了導(dǎo)管機(jī)器人系統(tǒng)從手軸向運(yùn)動和旋轉(zhuǎn)運(yùn)動的動態(tài)模型,設(shè)計(jì)了自適應(yīng)模糊PID 控制器分別控制導(dǎo)管的軸向運(yùn)動和旋轉(zhuǎn)運(yùn)動。仿真結(jié)果表明,所提出的自適應(yīng)模糊PID 控制方法降低了PID 控制方法的動態(tài)跟蹤誤差,明顯提高了從手對主手控制信號的跟蹤精度。同時,跟蹤主手信號與抑制擾動的性能均顯著提高。自適應(yīng)模糊PID 控制器用于主從導(dǎo)管機(jī)器人系統(tǒng)不僅有助于提高導(dǎo)管介入的精度,也提高了從手對主手的跟蹤性能和魯棒性,確保了介入手術(shù)的安全。
[1]MA S,GUO S X,XIAO N,et al.Development of a PID Controller for a Novel Robotic Catheter System[C]//International Conference on Complex Medical Engineering.Harbin,2011:64-68.
[2]GUO J,GUO S X,XIAO N,et al.A Novel Robotic Catheter System with Force and Visual Feedback for Vascular Interventional Surgery[J].International Journal of Mechatronics and Automation,2012,2(1):15-24.
[3]GANJI Y,JANABI-SHARIFI F,CHEEMA A N,et al.Remote Controlled Robot Assisted Cardiac Navigation:Feasibility Assessment and Validation in a Porcine Model[J].The International Journal of Medical Robotics and Computer Assisted Surgery,2011,7(4):489-495.
[4]PENNING R S,JUNG J,BORGSTADT J A,et al.Toward Closed Loop Control of a Continuum Robotic Manipulator for Medical Applications[C]//2011 International Conference on Robotics and Automation,Shanghai,2011:4822-4827.
[5]PENNING R S,JUNG J,F(xiàn)ERRIER N J,et al.An Evaluation of Closed-Loop Control Options for Continuum Manipulators[C]//2012 International Conference on Robotics and Automation,Saint Paul,2012:5392-5397.
[6]劉達(dá),劉登嶺.血管介入手術(shù)機(jī)器人推進(jìn)機(jī)構(gòu)的精度試驗(yàn)研究[J].機(jī)械設(shè)計(jì)與研究,2010,26(6):41-44.
[7]付宜利,高安住,劉浩,等.導(dǎo)管機(jī)器人系統(tǒng)主從介入[J].機(jī)器人,2011,33(5):579-584.
[8]段星光,陳悅,于華濤.微創(chuàng)血管介入手術(shù)機(jī)器人控制系統(tǒng)與零位定位裝置設(shè)計(jì)[J].機(jī)器人,2012,34(2):129-136.
[9]藍(lán)益鵬,邱超.磁懸浮永磁直線電動機(jī)懸浮系統(tǒng)模糊PID 控制系統(tǒng)的設(shè)計(jì)[J].機(jī)床與液壓,2013,41(7):94-96,100.
[10]黃衛(wèi)華.模糊控制系統(tǒng)及應(yīng)用[M].北京:電子工業(yè)出版社,2012.
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
鴨綠江(2021年35期)2021-04-19 12:24:18
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
河北畫報(bào)(2020年10期)2020-11-26 07:20:50
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
數(shù)學(xué)物理學(xué)報(bào)(2020年2期)2020-06-02 11:29:24
電子制作(2018年11期)2018-08-04 03:25:42
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19
鑿巖機(jī)械氣動工具(2016年3期)2016-03-01 04:00:25
中國衛(wèi)生標(biāo)準(zhǔn)管理(2015年3期)2016-01-14 03:41:47
