虛擬樣機變速電液操縱系統的設計與仿真研究
2015-04-26 08:24:46羅小梅顧宏弢韓顏瑩李娟毛福合
機床與液壓 2015年9期
羅小梅,顧宏弢,韓顏瑩,李娟,毛福合
(中國北方車輛研究所車輛傳動重點實驗室,北京 100072)
0 前言
高性能的動力換擋控制技術是反映車輛發展水平的重要標志之一,其性能優劣直接關系到車輛能否獲得良好的換擋品質,最大限度發揮傳動裝置潛能,提高車輛的機動性能。國外高度重視動力換擋控制技術研究,德國的LSG3000綜合裝置、俄羅斯特種車輛等都裝備了電液自動操縱系統。采用自動操縱技術后,與手動操縱相比,車輛平均越野車速在一般路面上提高了20~30%,在“S”路面上提高了40%,在困難的砂石路面上提高了10~25%,在土路上提高了10~15%,換擋品質也大大提高。電液自動操縱技術的應用延長了傳動系統的壽命和可靠性,駕駛操作更加舒適,提高了車輛持續行駛的能力。文中研究系統依照虛擬樣機項目所提出的功能要求,在總結經驗的基礎上,設計出適合于車輛傳動應用條件的電液操縱系統。
1 方案設計
1.1 功能要求
電液操縱系統必須能夠實現以下功能要求:
(1)實現兩種操縱模式:電液操縱及應急手動操縱模式。
(2)系統在電控情況下可以實現4個前進擋、2個倒擋、空擋。
(3)可以對液力變矩器的機械與液力工況實行控制,實現液力變矩器的解鎖閉鎖控制。
(4)按設定的程序,實現對換擋過程中操縱件油壓的緩沖控制,改善換擋品質。
1.2 主要液壓元件設計
電液操縱系統中的關鍵要素是液壓控制元件的設計與選擇。液壓平穩結合閥或稱液壓緩沖閥來實現動力換擋的油壓變化規律控制過程。這種控制是由純液壓控制元件來完成,不具有可變性,只能保證特定工況下傳動裝置可獲得較好的換擋品質。當車輛工況發生變化時,該系統液壓控制適應性變得較差,而且加工生產這種閥的成本很高。因此綜合考慮系統性能及制造成本后,在虛擬樣機項目中選用電液比例閥作為油壓控制元件。此類閥有眾多的優點:
(1)控制規律具有可變性,緩沖油壓曲線具有可調性;
(2)可以進行精確的壓力、時間控制;
(3)對油液不敏感,抗污染性強;
(4)可靠性高;
(5)互換性好;
(6)成本低。
其中最主要的是可以實現良好的換擋品質,這是系統的主要目標。
1.3 液壓油路控制邏輯
在虛擬樣機液壓操縱系統中,考慮到要使系統結構盡量簡單、外形尺寸盡量要小的條件下,采用電液比例閥全并聯控制方案,這樣在系統中的所有電液比例閥可以隨意互換,通用性很強,增加或減少擋位也很方便,對每一擋都可實現良好的控制性能,而且整個閥體設計結構簡單。為了彌補這種油路邏輯的缺點就是要保證ECU的可靠工作,這樣才能防止掛雙擋和順序換擋。
1.4 電子控制系統
電子控制系統主要是對電液比例閥的控制,按照給定的油壓緩沖曲線,通過給定合適的電流大小來完成對電液比例閥輸出壓力的控制。圖1為電控電流與油壓的特性曲線。
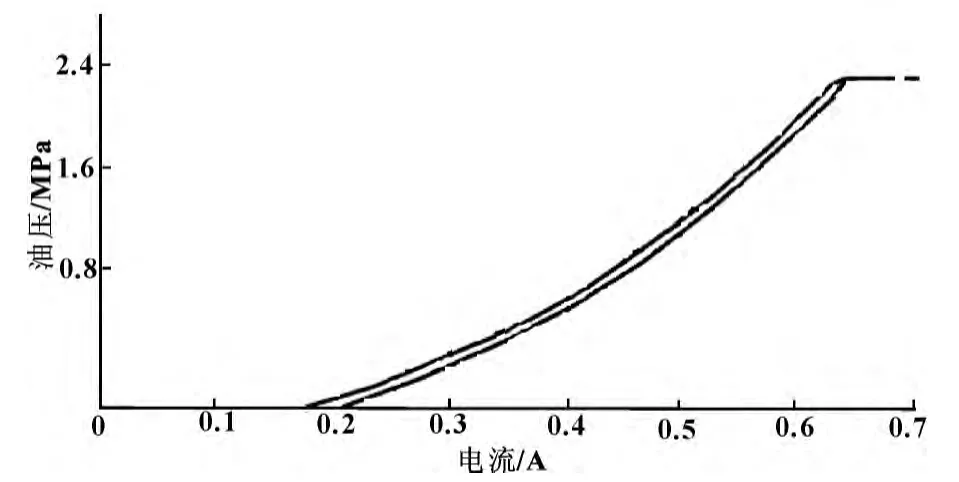
圖1 電液比例閥電流與油壓特性曲線
初期系統在電子控制系統方面擬采用開環控制方式。傳感器采集到的壓力信號只是作為一個觀察數據。當系統第一輪調試完后,為了提高和改善系統性能,擬對系統采用壓力反饋閉環控制系統。電液比例閥輸入信號采用PWM信號控制形式,為了優化控制性能,可加相關PID控制。電液控制系統圖如圖2所示。

圖2 電液控制系統圖
該電液控制系統很明顯已能夠滿足項目要求的功能,但是對于換擋品質的好壞還需在后面仿真環節中來驗證。
2 結構設計
因為虛擬樣機項目是要實現高功率密度,因此對各個零部件的外形尺寸要求很嚴格,電液操縱系統的結構設計中也始終遵循總體外形尺寸最小的優化設計原則:盡可能減小各部分尺寸包括在不影響流量和壓力的前提下油道通徑尺寸最小、合理利用每一個空間、適當選擇內外油路結合、盡量減少泄漏環節、工藝孔數量合理、各密封帶長度合適等,在充分考慮以上這些約束條件的情況下,并為了便于加工、便于與其他件連接以及方便布置,進行了整個系統的結構設計。著重說明一點的是:以前的閥體設計中不管油壓為多大對流速一般都取5 m/s來計算。
設計的閥塊由三部分組成,電液元件承載閥體,傳感器、梭閥承載閥體及油路段和變速操縱油路連接閥體。結構如圖3—6所示。

圖3 裝配圖
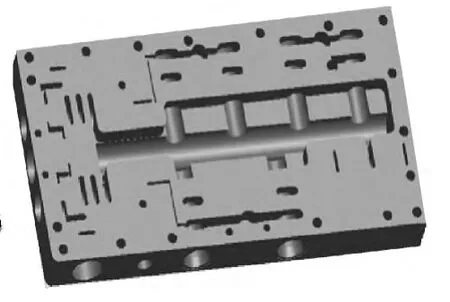
圖4 電液元件承載閥體
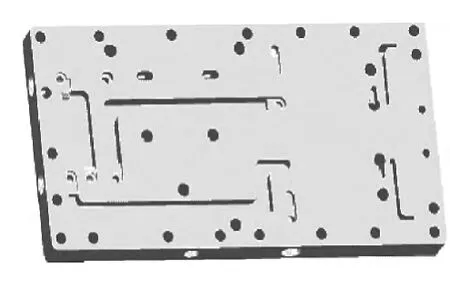
圖5 傳感器、梭閥承載閥體及油路段
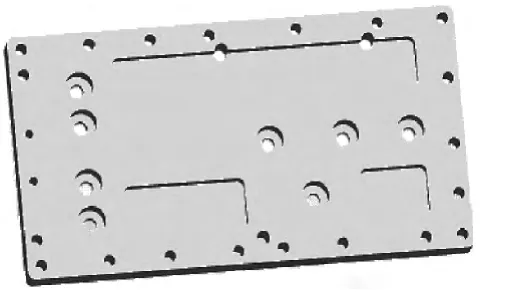
圖6 變速操縱油路連接閥體
3 仿真分析
文中仿真環節利用的是功能強大的建模和仿真軟件AMESim,仿真主要是驗證系統中對電液比例閥的油壓緩沖規律曲線的可控性的,其優劣還要進一步通過對輸入電流值的不斷調試來實現。
對關鍵元件-電液比例閥進行數學建模,忽略過濾器阻力、配合間隙泄漏等因素,得出主閥口流量方程、流量連續性方程、運動方程分別如下。
(1)主閥口流量方程
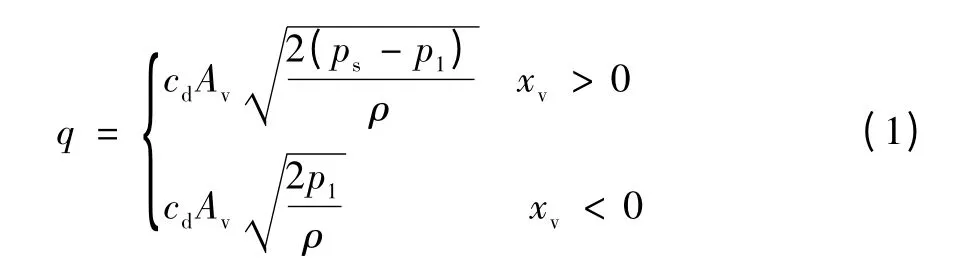
(2)流量連續性方程
主閥上腔:

離合缸腔:

(3)運動方程
主閥芯運動方程

離合缸運動方程:

在整個系統建模中,為了使得系統簡單但不影響功能的前提下,系統模型中有兩個完整的電液比例閥模型,其余用功能元件代替。由于所有操縱件油壓控制原理相同,因此,在文中僅就一個操縱件進行部分仿真。
電液操縱系統AMESim建模如圖7所示。
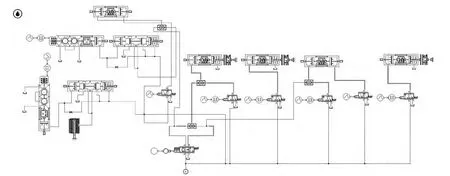
圖7 電液操縱系統AMESim模型
通過對相關參數的不斷設置后,最終得到基于以上模型的仿真結果如圖8、9所示。

圖8 c3快速充油曲線

圖9 2擋換3擋時c3油缸油壓緩沖曲線
由仿真結果可以看出該油缸的快速充油特性較好,說明電液比例閥的流量選擇合適;從油缸油壓緩沖曲線可以看出該電液比例閥在實現油壓緩沖方面表現出了較好的性能。
4 結論
所設計的電液操縱系統通過仿真驗證,尤其是對比例閥控制變速機構油缸充油及緩沖的性能進行了仿真驗證,快速充油、油缸內油壓緩沖曲線均滿足要求,在理論上得出該系統能夠實現良好的換擋緩沖性能,但對于該系統應用于特種車輛上后其可靠性和實車性能的好壞還有待于后續產品自身調試和與變速機構聯調試驗來驗證。
[1]許益民.電液比例控制系統分析與設計[M].北京:機械工業出版社,2005.
[2]付永領,祁曉野.AMESIM系統建模和仿真:從入門到精通[M].北京:北京航空航天大學出版社,2006.
[3]王春行.液壓控制系統[M].北京:機械工業出版社,1999.
[4]路甬祥.液壓氣動技術手冊[M].北京:機械工業出版社,2003.
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
現代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
藝術啟蒙(2018年7期)2018-08-23 09:14:18
家庭影院技術(2017年9期)2017-09-26 03:41:45
海峽姐妹(2017年7期)2017-07-31 19:08:17
