基于運動控制卡的翻轉機構自動下線系統設計
2015-05-22 03:06:26王毅可趙彤彤劉彩云楊益奎董玉德
西安工程大學學報 2015年3期
關鍵詞:信號
王毅可,趙彤彤,劉彩云,楊益奎,董玉德
(1.合肥工業大學 機械與汽車工程學院,安徽 合肥230009;2.安徽安凱華夏汽車零配件制造有限公司,安徽 合肥230601)
0 引 言
中型卡車在日常生活中的應用日益普遍,目前我國的中型卡車駕駛室已經平頭化,為了便于發動機的維修保養,要求駕駛室能夠向前翻轉.由于中型卡車駕駛室太重,單憑人力無法實現駕駛室的翻轉,因此必須要借助于翻轉機構[1].
運動控制技術的發展是推動新的產業革命的關鍵技術.文獻[2]采用VC++6.0調用運動控制卡的庫函數的方法控制多軸步進電機,研究按預定的運動軌跡及運動參數作定位的控制系統方式實現.文獻[3]研究運用Lab VIEW控制步進電機的運動控制方法與實現.文獻[4]研究開放化設計以及采用DSP、ISP和CPLD設計的多軸運動控制器.本文利用PCI 1010運動控制卡軟硬件集成功能,實現與上位機通信并對系統進行監控,同時接收傳感器信號,發出控制信號.采用“PC+運動控制卡”控制模式,利用PC硬件平臺構建設備的控制系統,利用運動控制卡達到接收信號、發送指令控制運動的效果,設計并制造了一套翻轉機構自動下線系統,從而提高企業生產線的自動化水平.
1 系統設計
1.1 總體方案設計
根據生產線的現狀,要達到自動下線的要求,設備需要滿足橫向移動和縱向的垂直起吊,以及翻轉機構的自動抓取功能.同時需要滿足各個運動結構的協調運動,保證系統能夠在規定的時間內完成這一系列的動作.通過對這些功能的分析以及結合現有生產線的運行結構,自動下線系統的總體設計方案如圖1所示.當翻轉機構裝配完成之后,運動到達傳感器1的位置后,伺服電機帶動跑車做水平橫向運動、氣缸伸出并執行將翻轉機構利用電磁鐵吸附或者抓舉(此處采用電磁鐵吸附的方法),然后氣缸回收帶動整個翻轉機構橫向運動,完成工件的水平轉運;最后經過觸發傳感器3后氣缸再次伸出并保持電機運動狀態,觸發傳感器4后電機停止運動、電磁鐵斷電釋放將翻轉機構安放于生產線旁傾斜的傳送帶,然后氣缸收回電機反向運動到達初始位置,等待執行下一次下線操作.整個自動下線系統需要能夠對于生產線中工件位置進行自動感知.系統中,通過安裝于生產線的傳感器實現整個自動下線系統的信號感知.
1.2 機械結構設計
基于以上系統方案設計,針對系統的執行部件的設計,需要將各個動作執行部分連接起來,組成一個系統,完成設計要求.整套設備的機械執行部分如圖2所示,圖2中顯示了需要控制的運動結構:1為伺服電機(MSME082S1)控制的電動跑車,實現橫向運動功能;2為氣缸電磁閥(SDPC4V230C-08),控制氣缸的伸出收回功能;3為電磁鐵(H1205040)吸附工件;4為限位開關,輔助完成動作執行;5為翻轉機構軸承.由于翻轉機構的型號多樣,在對于不同型號的翻轉機構進行下線時會遇到翻轉機構質量不平衡的狀態,因此在結構設計中添加了兩側的導向平衡結構,可以有效地保持運動中的平穩狀態.翻轉機構型號多樣的另一個表現為支撐臂的跨度多樣.為了適應這種情況,電磁鐵安裝于一個固定于氣缸上的導軌中保證了電磁鐵的橫向可移動性.同時導軌的兩側有兩個導向桿,可以起到防止氣缸轉動的效果.根據以上方案所做的結構設計滿足了不同產品型號的自動下線需求.
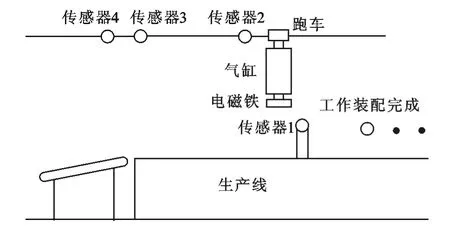
圖1 總體設計方案圖Fig.1 Overall design scheme

圖2 機械結構圖Fig.2 Mechanical body figure
1.3 控制系統的硬件設計
根據設計方案,控制系統的整體控制流程如圖3所示.從圖3可以看出,工業控制計算機通過運動控制卡實現對于伺服電機、電磁鐵和電磁閥的控制,同時實現對光電傳感器和限位、急停開關的信號采集.傳感器作為整個系統的反饋器件,通過位置感知來達到對于整個系統的運動操作和狀態變化的控制作用.通過運動控制卡中的通用輸出信號來控制電磁閥、電磁鐵,為了防止氣缸伸出與翻轉機構撞擊卡死的現象出現,在電磁鐵上安裝限位開關,控制氣缸的伸出位置,起到防止撞擊卡死保護機械結構的目的.
(1)信號采集電路設計 PCI1010運動控制卡具有通用輸入端口,輸入端口為低電平有效.輸入的端口給定的信號為控制信號,需要將這些信號轉換成可以直接控制電磁閥、電磁鐵的電壓.根據圖4(a)所示.從圖4(a)可以看出,輸入信號的轉換是將外部的高低電壓信號,轉換為運動控制卡可以識別的信號.電路就可以使外部電壓信號轉換為運動控制卡可以接收的信號,該電路嚴格的分開了外部控制執行部件的電路和信號控制電路,可以有效地達到排除信號干擾的目的.
電路的工作原理:當外部傳感器(E3F-DS30C4)未被觸發的時候,引腳2處于高電平狀態,電路中P5為接線口,其中引腳1,3給傳感器供電,這樣光耦PC817中的引腳1,2就沒有電流流過,引腳3,4之間也沒有電流流過,5V的信號電壓通過限流電阻R20加載在運動控制卡的輸入端口上.運動控制卡的輸入端口為低電平有效,所以運動控制卡不執行動作.
當外部傳感器被觸發的時候,引腳2處于低電平狀態,這樣光耦中引腳1,2就有電流流過,引腳3,4之間也就有電流流過,R20的下端相當于和地之間相連,Control5的信號為低電平.運動控制卡的輸入端口為低電平有效,基于此運動控制卡將采集到的信號傳遞到Lab VIEW程序中.

圖3 整體控制流程圖Fig.3 The whole control flow chart
(2)驅動控制電路設計 PCI1010運動控制卡具有通用輸出端口,輸出端口為低電平有效.輸出的信號為控制信號,需要將這些信號轉換成可以直接控制電磁閥、電磁鐵的電壓.實現該種輸出信號轉換的電路就是圖4(b)所示的電路.Control7接運動控制卡的輸出信號端口,運動控制卡的輸出端口初始狀態為高電平.
該電路就可以使運動控制卡的控制信號轉變為外部控制電壓,控制執行部件電磁鐵和電磁閥,該電路嚴格的分開了外部控制執行部件的電路和信號控制電路,達到了降低或消除信號干擾、保護運動控制卡的目的.

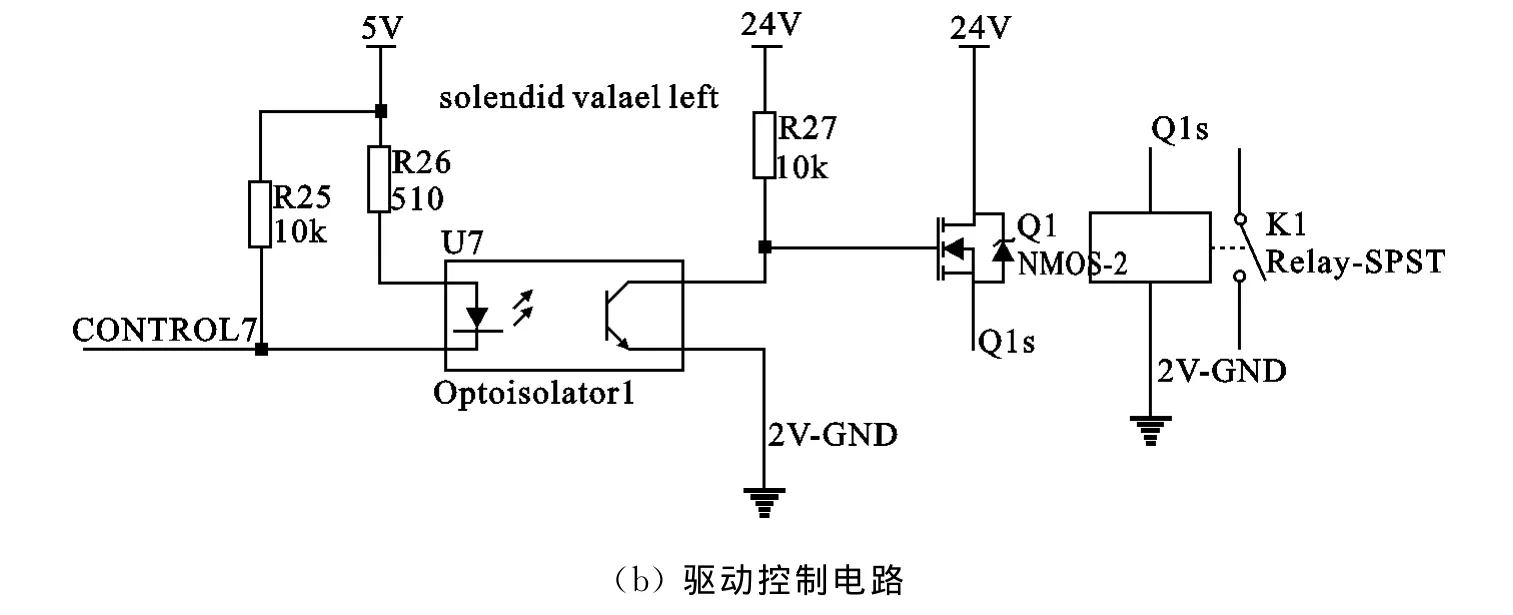
圖4 控制電路圖Fig.4 Control circuit diagram
電路的工作原理:初始狀態的時候,由于運動控制卡給出高電平的時候,此時光耦PC817是處于關閉狀態,此時光耦3,4引腳處于斷開狀態.這樣場效應管Q1的柵極施加電壓為24V,此時漏極和源極處于導通狀態,場效應管處于工作的狀態下,使得電磁繼電器K1的線圈就有電流流過,電磁繼電器處于接通狀態.此時電磁閥和電磁鐵通電.
當運動控制卡的輸出端口是低電平,所以光耦PC817是處于打開狀態,就是光耦的發光部分是處于工作的狀態下的,因此U7的右邊電路是導通的,相當于場效應管(RF3205)Q1的柵極直接接地,此時場效應管處于不工作的狀態下,使得電磁繼電器K1的線圈就沒有電流流過,電磁繼電器處于打開狀態.此時電磁閥和電磁鐵不通電.
2 Lab VIEW控制程序
2.1 軟件設計流程
考慮到翻轉機構下線裝置在執行下線功能時,因為生產線上的工件與機構初始化的位置是相對確定的,所以將程序流程控制分為初始化和自動操作兩部分,同時為了解決在自動運行中出現故障的問題,添加了手動操作界面,可以手動控制系統的各個運動部分,通過手動控制可以實現自動操作之外的更多的依據現場需求的功能.針對于初始化界面所完成的任務;因為翻轉機構的型號多樣,針對于每一種型號以及生產線的檔位,運動機構相對于生產線上翻轉機構的初始位置都有所不同,初始化可以實現針對于當前的產品型號與生產線檔位機構處于正確的位置,保證自動下線程序的準確運行.
2.2 自動操作
自動操作的原理為:Lab VIEW通過讀取傳感器信號來判斷自動下線裝置的位置信息,同時結合伺服電機的信息來確定下一步所要執行的步驟.其中伺服電機和傳感器的信息獲取,都是通過Lab VIEW調用運動控制卡的DLL讀取狀態寄存器獲取狀態位的信息,包括電機的邏輯/實位計數器、電機的輸出脈沖、加速度信號、正負限位信號等,在獲取狀態位信息之后,進行邏輯判斷然后仍然通過調用DLL的方式發送指令控制電機、氣缸和電磁鐵的動作執行.程序自動操作流程如圖5所示.
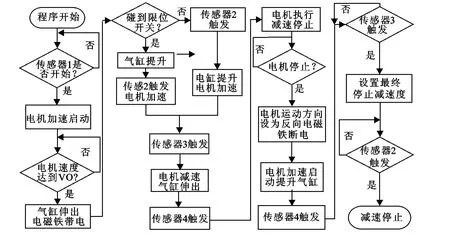
圖5 自動操作流程圖Fig.5 Automatical operation flow chart
2.3 狀態位獲取
為了最大程度的利用運動控制卡板卡資源,運動控制卡提供了狀態寄存器.可以通過調用Lab VIEW的庫函數,配置讀取運動控制卡的狀態寄存器信息,如PCI1010-GetRR0Status.PCI1010總共提供了RR0、RR1、RR2、RR3等4個狀態寄存器,對應于運動控制卡的37個接口.圖7(a)利用狀態寄存器讀取電機的運動狀態,同時還可以配置庫函數PCI1010-ReadCV讀取當前電機輸出脈沖速度等,將電機、傳感器、氣缸、電磁鐵等的工作狀態以及位置信息通過配置相應的庫函數將其信息轉化為布爾或數字信號至Lab VIEW中保存,框圖中共獲取了11個狀態量.
2.4 程序狀態轉移
將Lab VIEW獲取的狀態位信息轉換為布爾變量,然后將這些布爾變量創建為有序的布爾數組.運用labview所提供的“布爾數組至數值轉換”函數,將這些布爾變量所構成的布爾數組轉換為整形數值,然后再將數值鏈接至“條件結構”.由每個數值對應的布爾條件組合,在對應的條件分支中執行相應的動作,從而完成邏輯的控制.圖6為狀態轉變圖,圖7為對應的應用程序實現框圖.

圖6 程序狀態轉變圖Fig.6 Program state transition diagram

圖7 自動操作程序實現框圖Fig.7 Automatic operation procedure block diagram
圖7(a)為通過讀取運動控制卡的狀態寄存器信息轉變為布爾變量,以及在控制界面中設置的布爾變量組成布爾數組,這些布爾變量包括了傳感器的感知與否、伺服電機是否運動、運動的方向、速度大小、氣缸的限位開關以及電機的限位信息等11個信號.將這些采集到的信號轉換為布爾數組,繼而再轉換為數值,通過這些數值作為條件結構的控制量,在條件結構中控制不同的動作執行部件的運動.同時為了提高程序的可讀性,條件結構中僅對于伺服電機進行控制,對于電磁鐵與電磁閥的控制需要另建一個條件分支結構.因為對于條件分支結構的觸發變量均為由布爾數組所轉化的整型數值,通過圖7(b)中框圖區域4所示的設置一個“與”的邏輯操作,進行數字運算然后將狀態位信息轉換為二進制的“與或非”運算,最終實現將這兩個并行分支條件結構的同步處理.圖7(b)所示的即為觸發“145”分支所要執行的操作.“145“分支對應的消息為,在電機正向運行時,傳感器2被觸發;需要執行的的操作為提升氣缸(對應框圖區域5),電機加速到程序設定的值(對應框圖區域3).圖7(b)區域1對應的為對于自動下線系統檔位調節模塊的控制實現,區域2為對于緊急停止等危險情況處理實現.在程序中為了保證連續運行,如圖7(a)所示“自動操作”是在一個“While”循環中進行的,所以在進行運動控制時,對于動作執行部件的變量設置,都添加了移位器存器確保“while”循環執行之后,所有變量初始化,能夠正確進行下一次的自動下線操作.
2.5 程序界面
程序的操作界面分為3部分,對應于程序的初始化、自動操作和手動操作的功能實現.其中自動操作為程序的主要工作界面,負責將翻轉機構總成從生產線上自動取下來的任務.自動操作界面如圖8所示,主要由5部分組成:電機、傳感器工作狀態顯示部分,檔位型號選擇部分,電機調節顯示部分,故障處理部分(氣缸、電磁鐵、電機控制部分)和運行、緊急停止、程序結束按鈕控制部分.通過設置檔位和型號參數,點擊運行即可運行自動下線程序,出現故障時可以通過設置的物理按鈕急停,然后程序界面中操作相應的機構進行故障處理,排除之后即可繼續執行自動操作.程序操作界面簡潔,操作簡單.

圖8 自動操作界面Fig.8 Automatic operation interface
3 結束語
通過對于卡車翻轉機構生產線生產現狀及需求的分析,提出基于運動控制卡的新型翻轉機構自動下線系統開發方法,系統控制采用模塊化開發方式,實現了對于多種產品型號、多檔位等的自動下線需求.系統硬件控制電路包括伺服電機、電磁鐵與電磁閥等的控制,通過采用光耦、屏蔽雙絞線等元器件進行的電路設計使得系統更加的穩定可靠.同時,Lab VIEW模塊化程序的編制,實現了自動下線的需求,若進一步地將程序模塊整合可對下線系統的自動化水平再一次的提高.
[1] 師東升.某中型卡車駕駛室翻轉機構的設計與有限元分析[D]合肥:合肥工業大學,2009:12-16.SHI Dongsheng.The design and finite element analysis of torsion bar of the cab of medium-sized truck[D].Hefei:Hefei University of Technology,2009:12-16.
[2] 柳葉青,鄧振生,陳真誠,等.基于運動控制卡的控制系統的設計與實現[J].微計算機信息.2010,26(1):55-57.LIU Yeqing,DENG Zhensheng,CHEN Zhencheng,et al.Design and implementation of motion control system based on motion control card[J].Microcomputer Information,2010,26(1):55-57.
[3] 徐偉.基于開放式數控系統的翻轉總成下線裝置研究[D].合肥:合肥工業大學,2014:12-18.XU Wei.Research on flip assembly offline device based on open CNC system[D].Hefei:Hefei University of Technology,2014:12-18.
[4] 康健,陶濤,梅雪松,等.基于數字信號處理器的多軸運動控制器設計[J].西安交通大學學報,2003,37(5):495-498.KANG Jian,TAO Tao,MEI Xuesong,et al.Design of multi-axis motion controller based on digital signal processor[J].Journal of Xi′an Jiaotong University,2003,37(5):495-498.
[5] Wang Yongzhang,LIU Tao,FU Hongya,et al.Open architechture CNC system hit-CNC and key technology[J].Chinese Journal of Mechanical Engineering,2007,20(2):13-16.
[6] 張生果,陳懇.基于運動控制卡的爬壁機器人集成控制研究[J].電氣傳動,2008(6):26-30.ZHANG Shengguo,CHEN Ken.Research on integration control of wall-climbing robot based on motion controller[J].Electric Drive,2008(6):26-30.
[7] MANDUCHI G,MARCHI E De A.A new Lab VIEW interface for MDSplu[J].Fusion Engineering and Design,2012,21(6):20-30.
[8] 劉鳴藝,張京娟,付常亮.基于Lab VIEW 的組合導航顯示控制系統[J].電子測量技術,2013,36(10):72-76.LIU Mingyi,ZHANG jingjuan,FU Changliang.Design of surveillance and control interface for integrated navigation system based on Lab VIEW [J].Electronic Measurement Technology,2013,36(10):72-76.
[9] 李斌,周云飛,唐小琦.基于COM技術和OPC規范的開放式結構數控系統研究[J].中國機械工程,2003,14(4):19-21.LI Bin,ZHOU Yunfei,TANG Xiaoqi.Research on open architecture CNC system based on COM technology and OPC specification[J].China Mechanical Engineering,2003,14(4):19-21.
[10] 陳福彬,柴海莉,高晶敏.基于Lab VIEW 的自動化測試平臺的設計[J].電子測量技術,2011,34(11):9-14.CHEN Fubin,CHAI Haili,Gao Jingmin.Design of the automatic testing platform based on Lab VIEW[J].Electronic Measurement Technology,2011,34(11):9-14.
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
媽媽寶寶(2019年10期)2019-10-26 02:45:34
中國生殖健康(2019年3期)2019-02-01 06:12:26
鐵道通信信號(2018年11期)2019-01-19 01:15:08
電子制作(2018年11期)2018-08-04 03:25:42
鐵道通信信號(2018年2期)2018-04-18 12:18:10
鐵道通信信號(2016年11期)2016-06-01 12:11:32
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
中國病理生理雜志(2015年8期)2015-12-21 12:38:06
