多剛體衛星轉動慣量在軌辨識
2015-06-07 11:05:26李云端張大偉
空間控制技術與應用 2015年6期
許 瑩,呂 旺,李云端,張大偉
(上海衛星工程研究所,上海 200240)
?
多剛體衛星轉動慣量在軌辨識
許 瑩,呂 旺,李云端,張大偉
(上海衛星工程研究所,上海 200240)
慣量辨識需要精確的動力學特性,針對動力學特性不可忽略太陽電池陣轉動這一狀況,提出一種慣量辨識方法,用于衛星本體慣量和太陽電池陣慣量的聯合辨識.在建立多剛體姿態動力學基礎上,針對辨識變量的耦合特性,推導帶約束的優化辨識模型,再利用約束最小二乘算法求解.最后通過仿真計算驗證了辨識方法的可行性.
多剛體姿態動力學;轉動慣量辨識;約束最小二乘
0 引 言
衛星高精度姿態控制需要精確已知的慣量信息.地面人員在衛星發射前通過仿真計算和試驗測量等方式獲得衛星慣量信息.然而計算機輔助設計(CAD)軟件(例如ProE)所建的模型與實際裝配的衛星并不完全一致,使得慣量值存在計算誤差;地面試驗時由于重力以及測試設備本身的影響,所測慣量值不可避免地存在測量誤差;在軌運行時活動部件轉動、展開等動作以及推進劑消耗等因素都會引起慣量變化.因此,如何獲得慣量的精確值是航天領域值得研究的技術之一.
目前國內外許多學者都開展了對于衛星轉動慣量辨識的研究.Bergmann等[1-8]分別提出了基于遞推最小二乘的在線辨識算法,以辨識慣量矩陣逆的各個分量;荊武興等[9]提出了航天器轉動慣量和質心位置的辨識方法,首次提出了參數可辨識性的分析方法;徐文福等[10]分別提出基于參數解耦的線性辨識算法和基于粒子群優化算法的非線性辨識算法.上述研究盡管都能夠精確辨識慣量,但辨識模型大都是基于單剛體動力學,對于穩態運行的衛星而言,當太陽陣轉速較大時,即使星體主軸慣量大于太陽陣主軸慣量,單剛體姿態動力學特性已不能準確描述星體的動力學特性.以中國已發射的風云三號氣象衛星為例,太陽陣采用步進電機驅動控制,轉速幅值最小為0.059(°)/s,而星體角速度約為0.006(°)/s,若仍根據單剛體動力學推導辨識方程,則不能精確辨識衛星慣量.因此,辨識模型中有必要考慮太陽陣轉動的影響.
本文建立多剛體姿態動力學模型,針對衛星慣量時變特性,將太陽陣慣量從整星慣量中分離,推導線性定常系統的慣量聯合辨識模型,再對模型可辨識分析,針對辨識模型非完整特性,提出應用約束最小二乘算法對慣量進行辨識的方法,并通過仿真計算驗證算法的有效性.
1 衛星姿態動力學
將整星系統簡化為包括本體、飛輪和太陽陣在內的多剛體模型,基于角動量定理建立多剛體姿態動力學方程.
1.1 坐標系定義
定義地心慣性坐標系Oi-XiYiZi,星體質心系Ob-XbYbZb,附件系Op-XpYpZp,太陽陣質心系Oa-XaYaZa,具體含義詳見參考文獻[12].太陽陣繞+Yc軸旋轉,轉角為+180°的衛星構型,如圖1所示.
圖1 多剛體模型衛星構型Fig.1 Multi-rigid body model of satellite
圖1各矢量含義如表1所示.
表1 矢量定義
1.2 多剛體姿態動力學
多剛體姿態動力學模型[13-16]如下所示:
(1)
式中,Tde為環境干擾力矩項,Tdx為未知干擾力矩項.定義太陽電池陣相對本體轉角為α,t時間轉角為α=ωat,則太陽電池陣到本體系轉換矩陣Cba為
(2)

(3)
代入式(1),得
(4)
2 慣量辨識
慣量辨識方法是在建立辨識模型的基礎上,根據辨識輸入輸出數據,利用辨識算法求解變量.
2.1 辨識模型
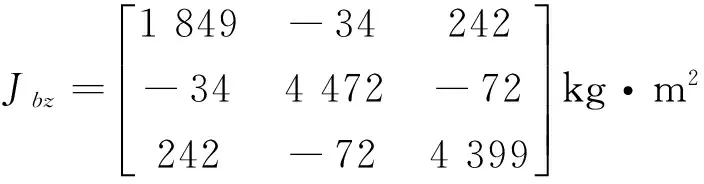
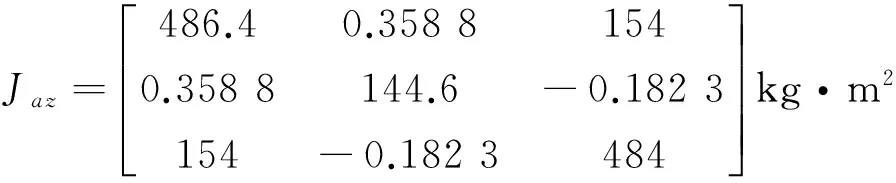
若辨識變量為本體慣量,則辨識問題就可以簡化單剛體慣量辨識,在此不再贅述.若辨識變量為整星慣量矩陣的各個分量,則無法得到變量獨立的線性辨識模型.因為方程含有太陽電池陣轉動相關項,在太陽電池陣轉動不可忽略情況下,整星慣量具有時變特性,因此無法辨識.為解決這一難題,本文針對本體慣量和太陽電池陣慣量的聯合辨識問題進行研究.將太陽電池陣慣量從整星慣量中分離,基于動力學模型推導線性定常的辨識模型.假設辨識變量X由本體慣量和太陽電池陣慣量的12個分量構成,即
X=[JbxxJbyyJbzzJbxyJbxzJbyzJaxx
JayyJazzJaxyJaxzJayz]T
含義如下:
(5)
式(1)恒等變形為
(6)

X=[JaxxJayyJazzJaxyJaxzJayz]T?
[j1j2j3j4j5j6]T
(7)
(8)
辨識輸入輸出等辨識已知信息如表2所示.

表2 辨識已知信息
2.2 可辨識性分析
上述聯合辨識模型帶入一次采樣數據只能得到3個方程,無法直接求解12個變量的問題.考慮多次測量構成超定方程組,基于最小二乘原理求解.假設變量X維數為M×1,一次測量方程如下:
bi=aiX+υi
(9)
式中下標i記為第i次測量(i=1,2,3,…,N).bi維數為3×1,ai維數為3×M,υi為測量噪聲,維數為3×1.利用N個采樣點的數據構建超定方程組:
B=AX+V
(10)
式中各矢量表達式如下:
(11)
最小二乘原理簡化表達如下:
minJ(X)=(B-AX)T(B-AX)
(12)
針對多剛體模型仿真,秩的結果如下:
rank(A)=11,rank([A,B])=12
(13)
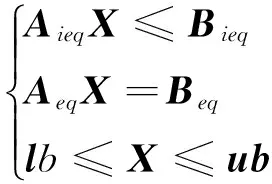
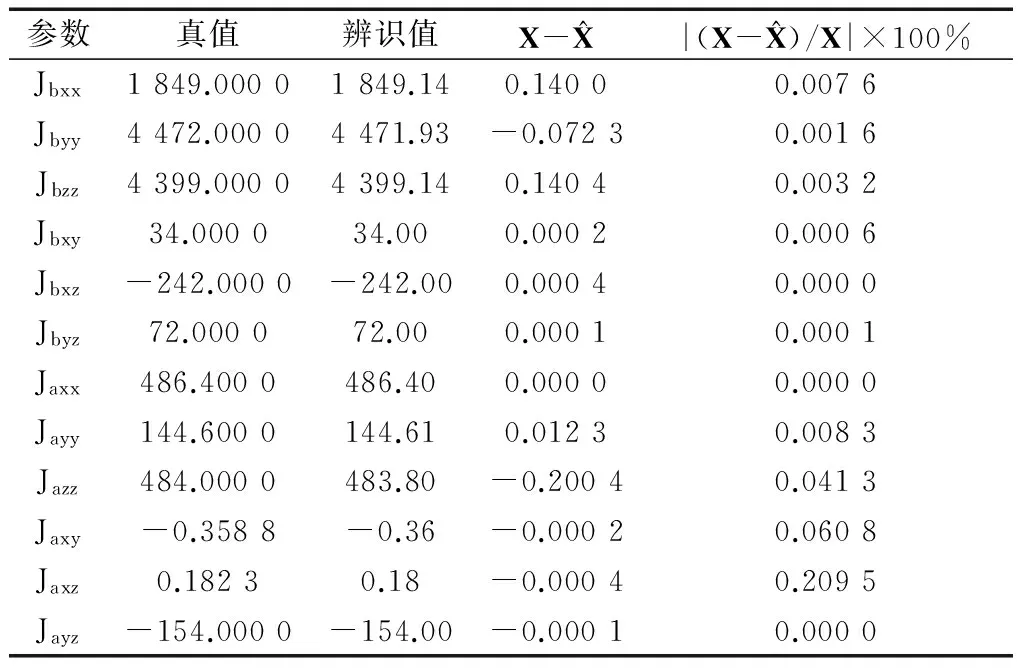
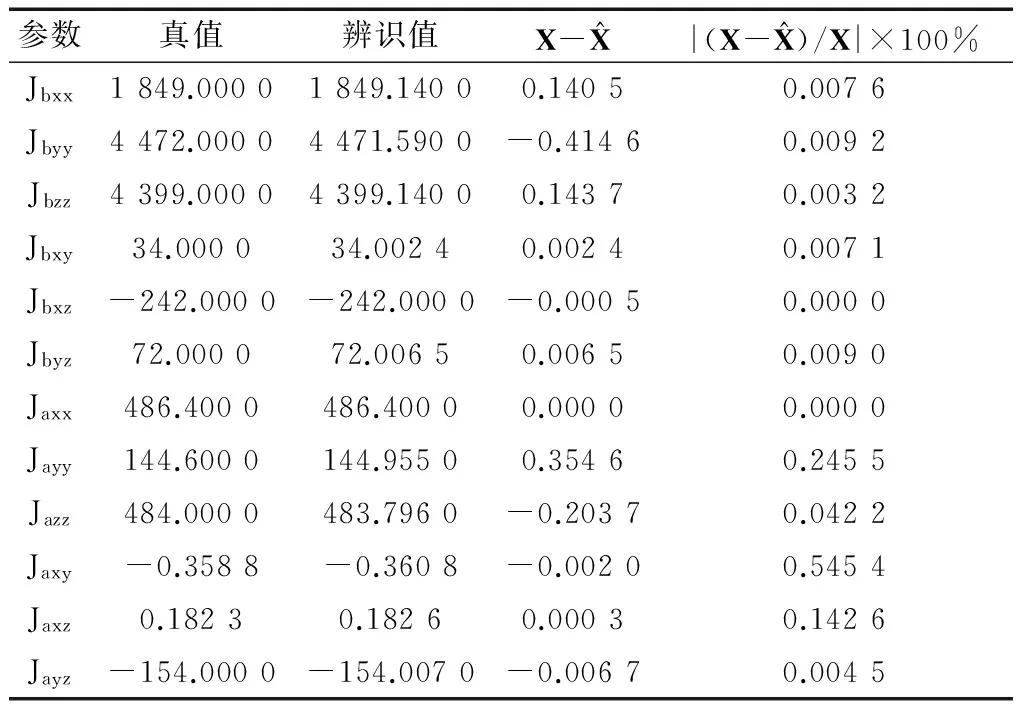
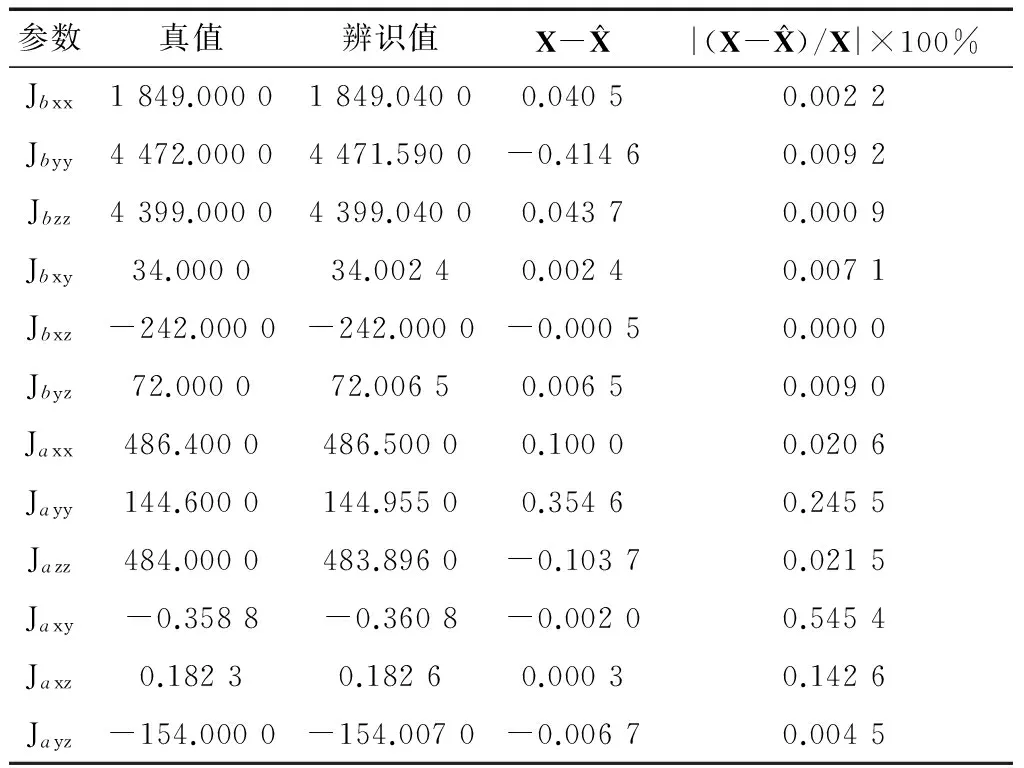
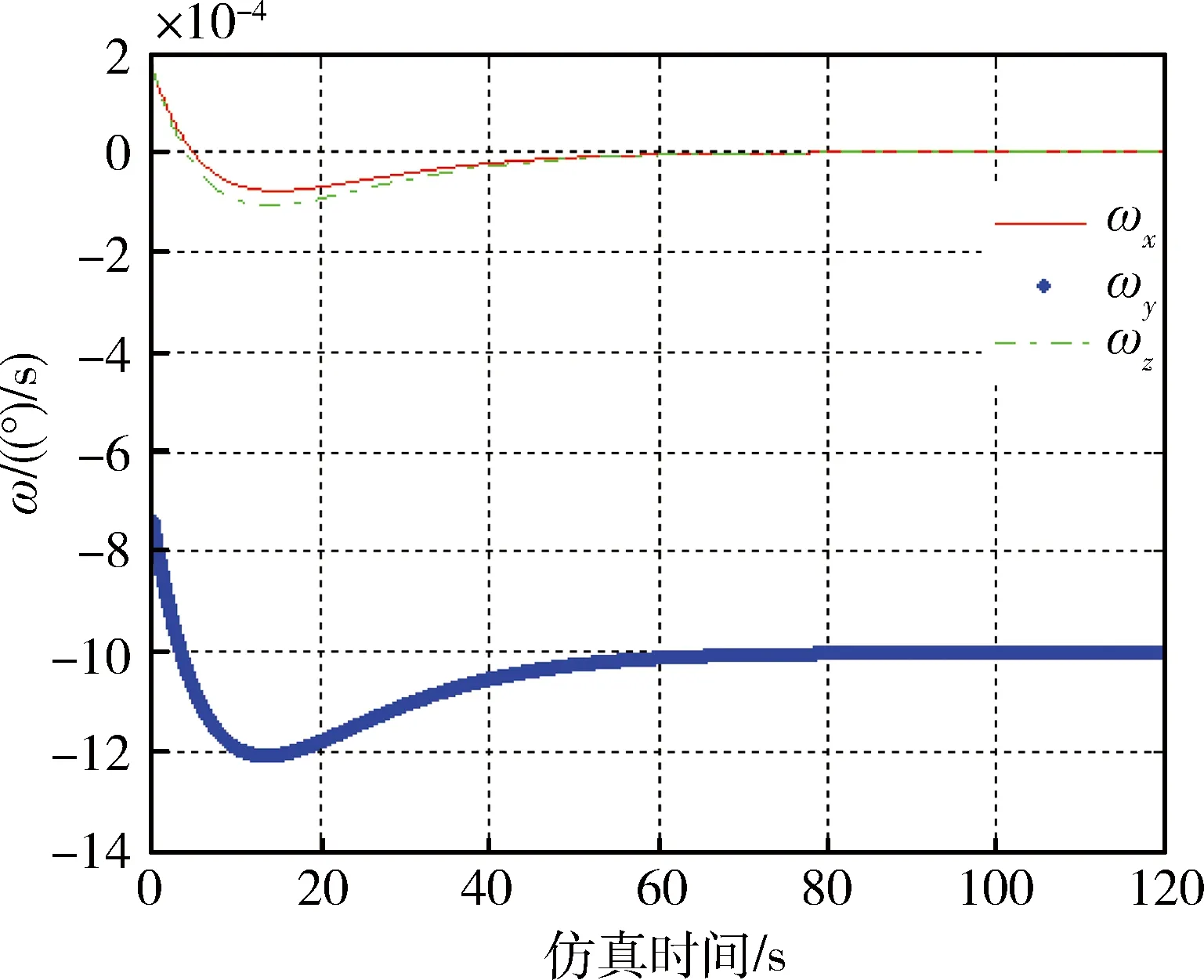
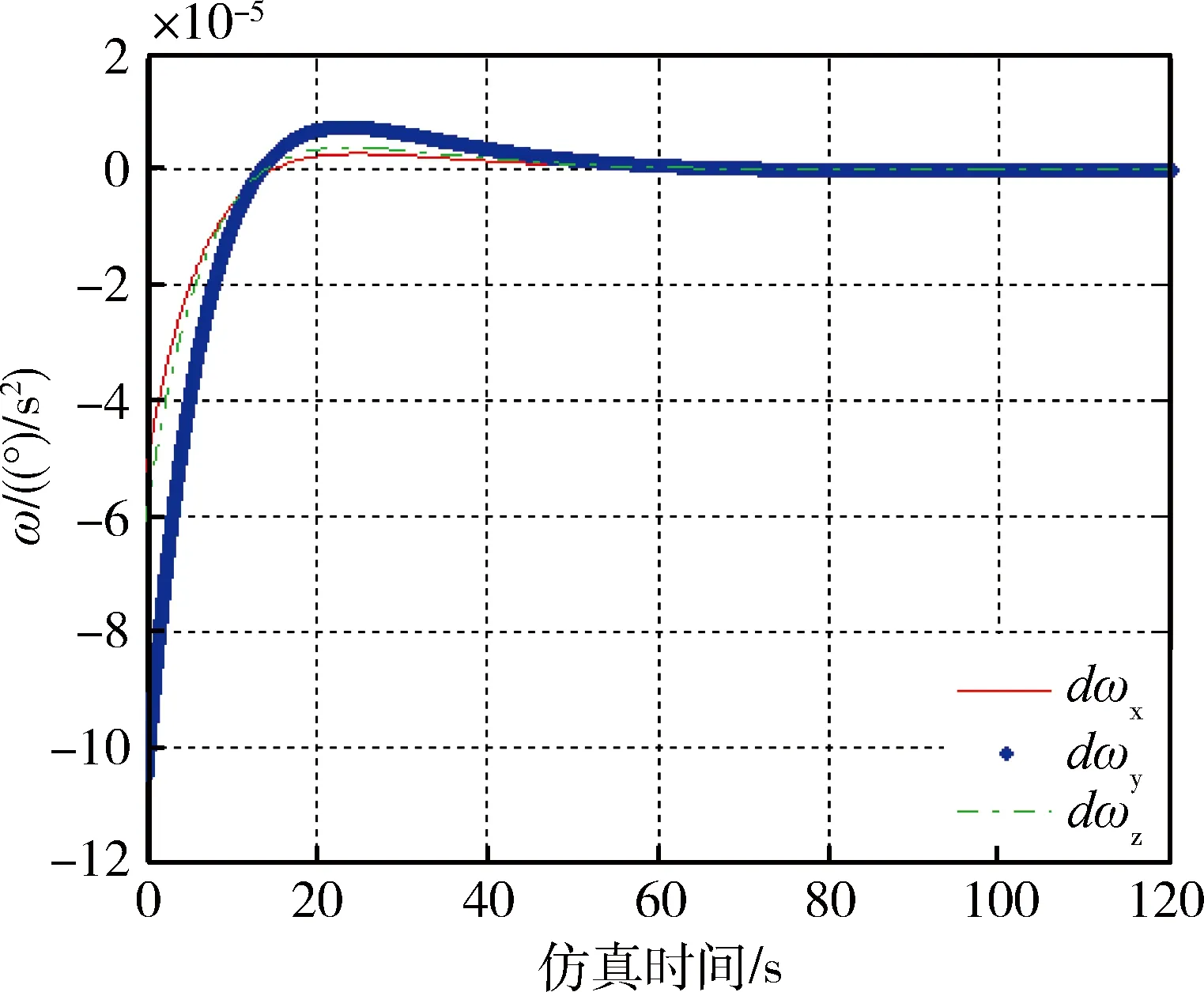
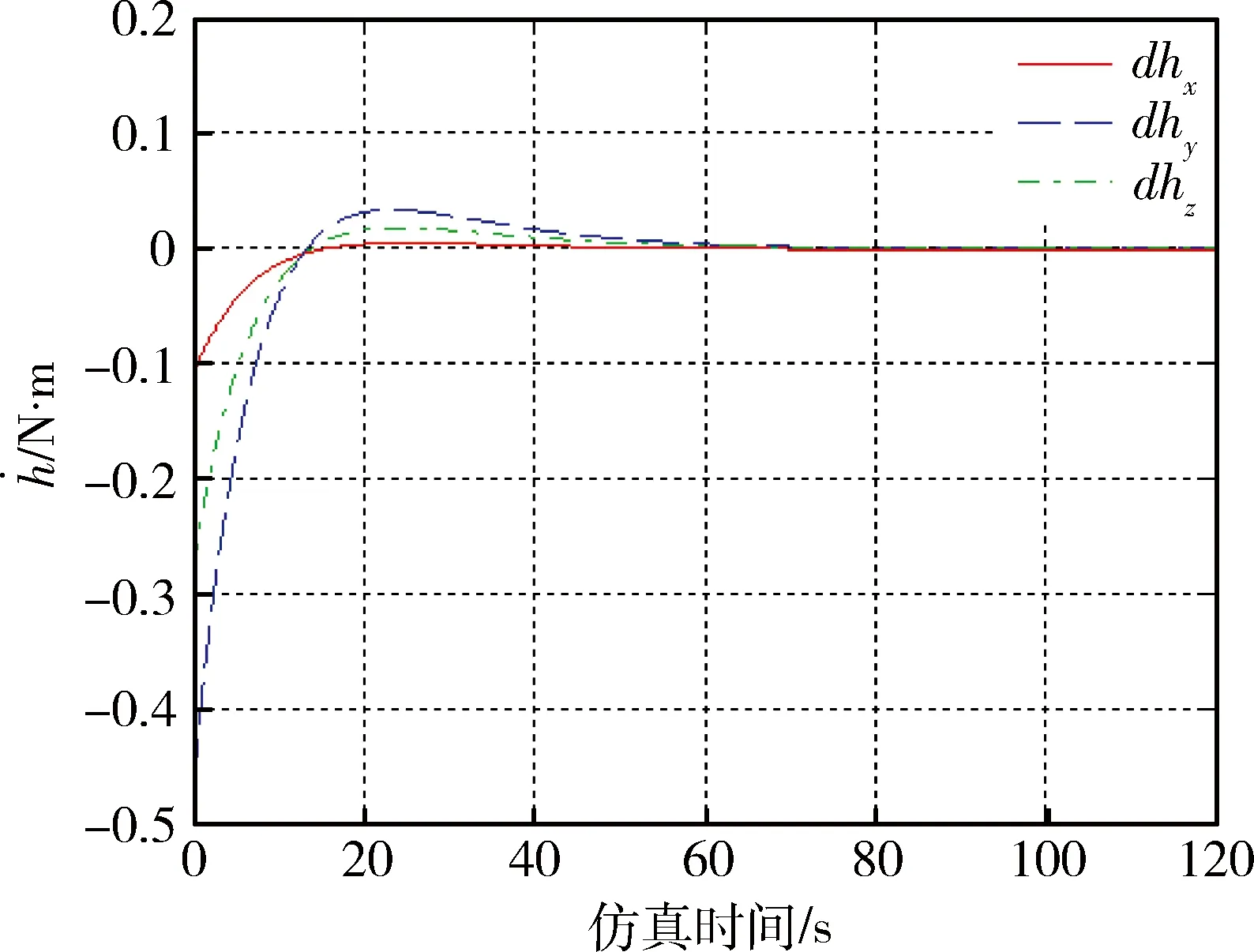
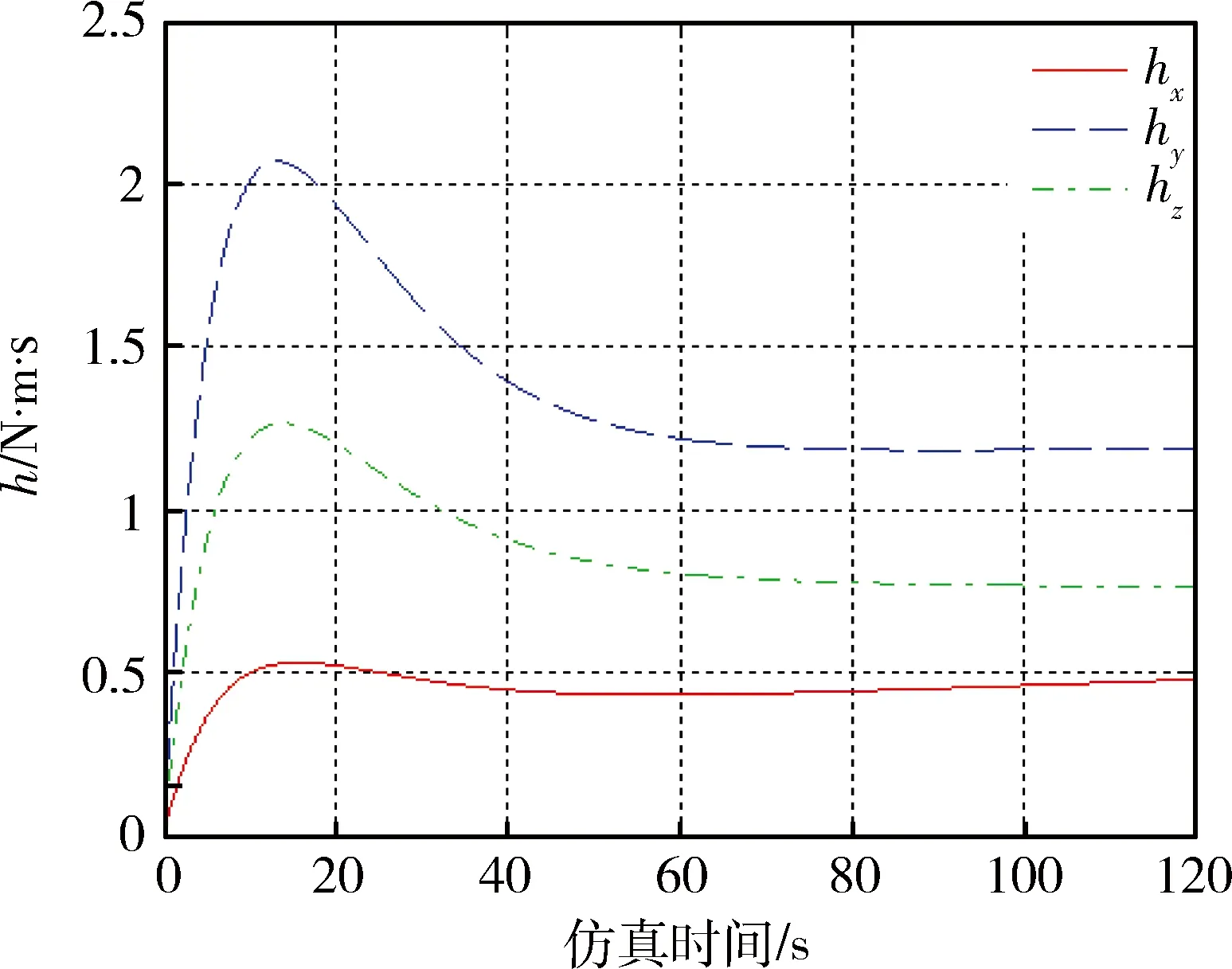
此時rank(A) A(:,1)-A(:,7)+A(:,3)-A(:,9)=0 A(:,1)-A(:,7)≠0,A(:,3)-A(:,9)≠0 A(:,1)-A(:,3)≠0,A(:,7)-A(:,9)≠0 (14) 系數矩陣第1、3、7、9列分別對應辨識變量Jbxx,Jbzz,Jaxx,Jazz,第一式特點表明這4個變量中存在耦合變量.若Jaxx已知,通過上式中的第二式和第三式提供的辨識信息可以辨識出Jbxx,Jbzz,Jazz.為解除上述變量的耦合關系,考慮增加辨識約束,提出一種帶約束的優化辨識模型. 首先構造目標函數 f(X)=AX-B (15) 其次確定約束條件.若太陽電池陣X軸方向慣量Jaxx精確已知,則目標函數和等式約束分別如下: (16) Aeq=[0 0 0 0 0 0 1 0 0 0 0 0], Beq=Jaxx (17) 若Jaxx已知某一范圍l≤Jaxx≤u,則約束為: Aieq=[0 0 0 0 0 0 -1 0 0 0 0 0 0 0 0 0 0 0 1 0 0 0 0 0], (18) 2.3 辨識算法 將不滿秩線性系統的參數辨識問題轉化為帶約束的優化問題,在自變量滿足約束條件的情況下實現目標函數的最小化.考慮如下的約束優化問題: minf(x),x∈S (19) xk+1=Gk(xk,xk-1,…xk-p+1),k=p,p+1,… (20) 式中,Gk為迭代函數,x1,x2,…xp為初始點,由于有p個點,上式稱為p步迭代算法,p=1則稱為一步迭代算法,如下所示: xk+1=Gk(xk) (21) 在構造迭代格式時,首先需要構造評價函數M(x)來比較迭代點xk和xk+1的優劣,在每一步迭代中滿足以下條件: M(xk+1)≤M(xk) (22) 因此這種迭代算法為下降算法,通常M(x)=f(x).實際應用中的迭代格式如下所示: xk+1=xk+αkdk (23) 式中dk為搜索方向,αk為步長. 本文采用上述解決帶約束的最小二乘問題,目標函數和約束分別如下: (24) (25) 式中Aieq,Bieq皆為不等式約束系數,Aeq,Beq皆為等式約束系數,lb,ub分別為變量上界和下界. 考慮四種辨識工況,前兩種假設太陽電池陣慣量精確已知,根據是否考慮測量噪聲,得到兩組辨識結果;后兩種假設太陽電池陣慣量已知某一范圍,根據是否考慮測量噪聲,得到另外兩組辨識結果. 假設太陽電池陣慣量Jaxx為486.4kg·m2,不考慮陀螺測量噪聲,辨識結果與分析見表3. 表3 等式約束時不考慮測量噪聲辨識分析 由表3數據可知,在Jaxx精確已知條件下,本體慣量辨識結果中絕對誤差最大為0.2 kg·m2. 假設太陽電池陣慣量Jaxx為486.4 kg·m2,考慮速率陀螺測量隨機噪聲0.2(°)/h,辨識結果與分析見表4. 表4 等式約束時考慮測量噪聲辨識分析 表4分析結果表明在考慮測量噪聲情況下辨識誤差也非常小,但辨識精度有所下降. 假設太陽電池陣慣量Jaxx已知范圍為486.3≤Jaxx≤486.5,不考慮測量噪聲的情況下,辨識結果與分析如表5所示. 表5 不等式約束時不考慮測量噪聲辨識分析 由上表數據可知,在Jaxx已知某一范圍條件下,本體慣量辨識結果中絕對誤差最大為0.1 kg·m2.與已知某一精確值條件下的辨識結果相比,Jaxx已知某一小范圍得到的辨識結果更為精確. 假設太陽電池陣慣量Jaxx已知范圍為486.3≤Jaxx≤486.5,即辨識時太陽陣主軸慣量Jaxx偏差范圍為±0.1 kg·m2,考慮速率陀螺測量隨機噪聲0.2(°)/h,辨識結果與分析如表6所示. 表6 不等式約束時考慮測量噪聲辨識分析 上表分析結果表明在考慮測量噪聲情況下辨識誤差也非常小.本體慣量辨識結果中絕對誤差最大為0.21 kg·m2.若辨識約束改為Jxx,Jzz,Jazz其中任意一個已知精確值或者已知某一范圍,同樣能夠精確辨識.由于篇幅所限,在此不再贅述. 以考慮噪聲的辨識工況為例,仿真120 s的辨識數據分別如下所示: 圖2 本體慣性角速度變化Fig.2 Angular velocity n of body 圖3 本體慣性角加速度變化Fig.3 Angular acceleration of body 圖4 飛輪力矩變化Fig.4 Torque of wheels 圖5 飛輪其角動量變化Fig.5 Momentum of wheels 本文研究帶太陽電池陣的衛星慣量辨識方法,在建立帶約束條件的優化辨識模型的基礎上,基于約束最小二乘算法精確求解本體慣量和太陽電池陣慣量在內的12個變量值.所有辨識工況下得到的辨識結果中,絕對誤差最大約為0.2 kg·m2,和真值相差3個數量級以上,辨識精度較高,說明辨識方法可行.盡管如此,后續研究仍有許多工作要做,例如對于多剛體模型假設的合理性有待進一步研究. [1] BERGMANN E V, WALKER B K, LEVY D R. Mass property estimation for control asymmetrical satellite[J]. Journal of Guidance, Control and Dynamics, 1987, 10(2): 483-492. [2] EDWARD W, CHRIS L, ROBERT W M. On-line gyro-based mass property identification for thruster controlled spacecraft using recursive least squares[C]//Proceedings of the 45thIEEE International Midwest Symposium on Circuits and systems. New York:IEEE, 2002: 1-4. [3] EDWARD W, SUTTER D W, MAH R W. Motion based on mass and thruster property identification for thruster controlled spacecraft[C]//Proceedings of the AIAA Infotech@Aerospace Conference. Washington D.C.: AIAA, 2005: 1-40. [4] TANYGIN S, WILLIAMS T. Mass property estimation using coasting maneuvers[J]. Journal of Guidance, Control and Dynamics. 1997, 20(4): 625-632. [5] WILSON E. Multiple concurrent recursive least squares identification with application to on-line spacecraft mass-property identification[P]. Redwood City, US 7110915B2. 2006. [6] 王書廷,曹喜濱.衛星質量特性的在線辨識算法研究[C]//第25屆中國控制會議論文集.北京:中國自動化學會,2006: 519-524. WANG S T, CAO X B. On-line mass-property identification algorithm research for satellite[C]//Proceedings of the 25thChinese Control Conference. Beijing: CAA, 2006: 519-524. [7] 黃河, 周軍, 劉瑩瑩. 航天器轉動慣量在線辨識[J]. 系統仿真學報, 2010, 22(5): 1117-1120. HUANG H, ZHOU J, LIU Y Y. On-line Identification of Spacecraft Moment of Inertia[J]. Journal of System Simulation, 2010, 22(5): 1117-1120. [8] 荊武興,韋文書,高長勝.基于陀螺測量信息的航天器突變參數識別方法[J].系統工程與電子技術,2013,35(9):1928-1932. XING W X, WEI W S, GAO CS. Identification of the mutation parameters for the spacecraft based on gyros[J]. Systems Engineering and Electronics 2013, 35(9): 1928-1932. [9] 徐文福,何勇,王學謙等. 航天器質量特性參數的在軌辨識方法[J].宇航學報,2010,31(8):1907-1914. XU W F, HE Y, WANG X Q, et al. On Orbit identification of mass characteristic parameters for spacecraft[J]. Journal of Astronautics, 2010, 31(8): 1907-1914. [10] 章仁為.衛星軌道姿態動力學與控制[M]. 北京航空航天大學出版社. 1998 [11] GILL P E, MURRAY W, WRIGHT M H. Practical optimization[M]. London: Academic Press, 1981. Identification of Rotary Inertia for Multi-Body Satellite XU Ying, LV Wang, LI Yunduan, ZHANG Dawei (Shanghai Institute of Satellite Engineering, Shanghai 200240, China) Accurate dynamics characteristics are important for rotary inertia identification. Considering the effect of solar cell array rotation in dynamics, a method of inertia identification is proposed, which is applied to identify the body inertia and solar cell array inertia simultaneously. Thinking of the coupling between the variables, the optimized identification model with constraint is deduced based on the modeled multi-body attitude dynamics. The precise solution is achieved via the algorithm of constraint least squares. Finally, the feasibility of the identification method is verified by simulation and calculation. multi-body attitude dynamics; rotary inertia identification; constraint least squares 2015-07-19 V44 A 1674-1579(2015)06-0031-06 10.3969/j.issn.1674-1579.2015.06.007 許 瑩(1990—),女,碩士研究生,研究方向為航天器姿態動力學與控制;呂 旺(1983—),男,高級工程師,研究方向為衛星總體設計;李云端(1976—),男研究員,研究方向為衛星總體設計;張大偉(1980—),男,高級工程師,研究方向為衛星軌道、姿態動力學與控制、衛星總體設計.
3 仿真分析


4 結 論
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
光學精密工程(2016年6期)2016-11-07 09:07:19
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
核科學與工程(2015年4期)2015-09-26 11:59:03