基于直流力矩電機的位置控制伺服系統(tǒng)研究
2015-06-15 15:40:59于寶成王春梅
武漢工程大學學報 2015年10期
關鍵詞:系統(tǒng)
于寶成,龍 沖,王春梅
1.武漢工程大學計算機科學與工程學院,湖北 武漢 430205;
2.智能機器人湖北省重點實驗室(武漢工程大學),湖北 武漢430205;
3.湖北省智能焊接裝備工程技術研發(fā)中心,湖北 武漢 430205
基于直流力矩電機的位置控制伺服系統(tǒng)研究
于寶成1,2,3,龍 沖1,2,王春梅1,2,3
1.武漢工程大學計算機科學與工程學院,湖北 武漢 430205;
2.智能機器人湖北省重點實驗室(武漢工程大學),湖北 武漢430205;
3.湖北省智能焊接裝備工程技術研發(fā)中心,湖北 武漢 430205
為了滿足工控平臺能快速,穩(wěn)定控制負載位置的需求,設計了一種基于直流力矩電機的位置控制伺服系統(tǒng).該系統(tǒng)的硬件部分主要由ARINC429通信卡、高性能DSP控制器、光電編碼器、直流力矩電機和數(shù)據(jù)采集卡組成.首先通過ARINC429通信卡發(fā)送根據(jù)協(xié)議產生的通信指令,用來控制電機的轉速和位置.再利用光電編碼器和數(shù)據(jù)采集卡來反饋位置信息,最后在上位機上進行監(jiān)控.軟件部分采用labview進行編寫,上下位機通過自定義的通訊協(xié)議進行數(shù)據(jù)通信,上位機發(fā)送命令到下位機,下位機接收命令并處理后將結果反饋給上位機,從而實現(xiàn)對下位機平臺的控制.通過隨動系統(tǒng)項目的應用測試,證明該系統(tǒng)功能穩(wěn)定,能夠滿足實際項目的基本需求.
直流力矩電機;穩(wěn)速控制;伺服控制;光電編碼器
0 引 言
伺服系統(tǒng)又稱隨動系統(tǒng),是用來精確地跟隨或復現(xiàn)某個過程的反饋控制系統(tǒng),其輸出量能以一定準確度跟隨輸入量的變化而變化,伺服系統(tǒng)廣泛應用于各種工業(yè)控制行業(yè).近幾年,直流伺服控制系統(tǒng)飛速的發(fā)展,它能直接通過控制電樞電流,來進行對轉矩與轉速的控制,憑借它控制簡單,調速性能優(yōu)異的優(yōu)點,使其在工業(yè)控制中具有廣泛的應用[1].因此,這里主要采用光電編碼器、DSP控制器、直流力矩電機和數(shù)據(jù)采集卡等硬件來設計一個基于直流電機位置控制系統(tǒng).在本系統(tǒng)中,主要通過數(shù)據(jù)采集卡和直流電動機來采集數(shù)據(jù)和控制負載的位置,其中直流電動機的穩(wěn)定性和高精度性對整個系統(tǒng)參數(shù)的測量具有重大的影響.
1 工作原理
伺服控制系統(tǒng)接收由上位機發(fā)送給DSP控制器的工作指令,根據(jù)先前制訂的通信協(xié)議來對指令進行解析,進而輸出控制電機精度和速度的指令信號,最后根據(jù)解析出的信號來控制直流電動機的轉動速率和角度,并將角度相關信息經過編碼器和數(shù)據(jù)采集卡反饋到上位機上.同時在上位機軟件上設定好采樣頻率,系統(tǒng)每隔10 ms,通過把當前經反饋得到的位置與速度值和預先設定的值進行比較,看是否在閾值范圍內,如果不在,則繼續(xù)按照給定的時間間隔來接受角度值,如果在閾值范圍內,系統(tǒng)則會向電機發(fā)送停止命令.最后使直流力矩電機能精確的控制負載在給定的時間內到達預先設定的位置.在本系統(tǒng)中,由DSP控制器、直流力矩電機、光電編碼器和數(shù)據(jù)采集卡構成反饋回路,其中負載電路,增量式光電編碼器和數(shù)據(jù)采集卡相連接,通過數(shù)據(jù)采集卡來采集當前負載所在的位置和電機的速率,并能在上位機上給予友好的界面顯示.其工作原理如圖1所示.
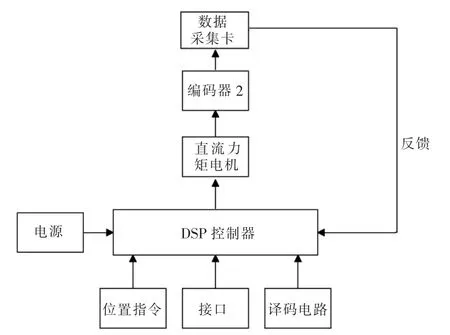
圖1 系統(tǒng)工作原理圖Fig.1 System working schematic diagram
2 伺服工作系統(tǒng)硬件設計
本系統(tǒng)硬件部分主要由DSP控制器、直流力矩電機、增量式光電編碼器和數(shù)據(jù)采集卡等部分組成.系統(tǒng)的控制部分主要以DSP控制器為核心,利用其外圍電路接口(電源模塊電路、串行通信接口電路、數(shù)字模擬轉換電路、增量式編碼器接口電路等)來準確控制直流力矩電動機.系統(tǒng)利用DSP接收上位機發(fā)送過來的控制指令,通過轉速電流雙環(huán)調節(jié)器,利用其pwm模塊和AD模塊的功能來輸出控制電機運動的pwm波形.將其增量式編碼器接口電路與編碼器相連接,將通過編碼器獲得的信號經過細分處理,最后反饋給上位機.以此最終完成負載的位置伺服控制,使負載的轉動滿足系統(tǒng)要求.其中利用轉速電流雙閉環(huán)的控制示意圖如圖2所示.
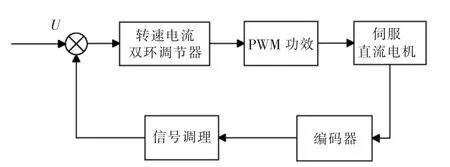
圖2 直流電動機轉速電流雙閉環(huán)示意圖Fig.2 Diagram of loop current velocity of DC motor
2.1 DSP控制器
系統(tǒng)采用TI公司生產的TMS320F2812型號的數(shù)字處理器.該型號處理器具有比較完善的外圍控制接口和豐富的電機控制外設電路,并且指令的完成時間比較短.它具有高速信號處理和數(shù)字控制所必須的體系特點.配合pwm脈沖發(fā)生器,AD轉換器和數(shù)字I/O接口等片上外設,使之為電機和其它控制領域應用的實現(xiàn)提供了良好的平臺.本系統(tǒng)中,該控制器具有多達16位的模擬輸入通道,具有AD轉換功能.利用該控制器的pwm輸出,來對速度電流環(huán)進行控制.可以通過連接光電編碼器和該控制器上正交編碼脈沖電路的編碼和計數(shù)引腳,來獲得負載的位置和速率信息.
2.2 光電編碼器
光電編碼器是一種通過光電轉換將輸出軸上的機械幾何位移量轉換成脈沖、數(shù)字量或模擬量信號輸出的傳感器.利用它可以實現(xiàn)角度、直線位移、轉速等模擬物理量的測量[2].
由于在本伺服系統(tǒng)中需要根據(jù)反饋的信號來不斷地調整直流力矩電機的速率和位置,因此主要利用光電編碼器,數(shù)據(jù)采集卡和上位機來構成一個位置環(huán)控制.在負載機構上連有增量式光電編碼器,其輸出信號經過細分電路進行細分處理,通過數(shù)據(jù)采集卡采集負載俯仰、方位和消旋的變化量,在上位機上通過和初始設置的值比較來不斷改變驅動信號,以此來控制直流力矩電機和負載位置的不斷變化,最終達到系統(tǒng)的位置要求.本系統(tǒng)中位置環(huán)和速度環(huán)的控制相輔相成,使負載能精確,高速的到達目的位置.系統(tǒng)采用中國電子科技集團公司第二十一研究所生產的QA-45光電編碼器,其具有重量輕、功能全、高頻響應、分辨能力高、承載能力強、力矩小、耗能低等優(yōu)點.光電編碼器主要由精密軸系、光電碼盤、紅外發(fā)光二極管、光電三極管和處理電路等幾個部分組成,其中光電碼盤由編碼碼盤和狹縫碼盤兩個部分組成,屬于核心部件.為了在負載上進行簡便的安裝,碼盤將采用耐用、輕便的金屬結構.其工作是通過光電角度傳感器將軸系的角度信息轉為光電信號,傳至細分計數(shù)電路部件.通過細分計數(shù)電路部件對光電信號進行整形、判向、細分和計數(shù),最終將角度信息以16位總線數(shù)據(jù)方式并行輸出.
2.3 直流力矩電機
直流力矩電機是一種具有軟機械特性和寬調速范圍的特種電機.可以以較小輸出轉矩,而具有較高的輸出轉速,轉速和輸出扭力能獨立進行調節(jié),使用方便,操作簡單,比一般交流力矩電機具有更高的操控性.其特點是低轉速、響應快、特性線度好、過載能力強.廣泛應用于各種機械制造、高精度轉動系統(tǒng)、以及雷達監(jiān)控系統(tǒng)上[3].本系統(tǒng)采用由中國電子科技集團公司第二十一研究所生產的型號為J72LY001的直流力矩電動機.
2.3.1 伺服系統(tǒng)電流速度閉環(huán)分析 系統(tǒng)為了準確快速的控制負載的俯仰、方位、消旋的位置移動,直流力矩電機運動的穩(wěn)定性和精確性對負載的影響占有絕對因素.為了使負載能在最短的時間內獲得最大的加速度,要發(fā)揮電動機的過載能力,并且要加大電流.同時當負載的轉速達到穩(wěn)態(tài)時,電流也應該快速下降,最后使電流保持恒定.因此,設計了雙閉環(huán)調速控制系統(tǒng).當電流快速下降時,此時是以電流負反饋為主.當需要保持負載穩(wěn)定轉動時,此時是以轉速負反饋為主.這樣可以防止電樞電流在動態(tài)過程中超過既定的允許值,從而可以使電樞電流能準確的隨著控制電壓指令不斷的變化來準確控制電機的輸出力矩,就可以使負載能以較高的精確性和穩(wěn)定性達到理想位置.因此在本系統(tǒng)采用了兩個調節(jié)器構成電流與速度的雙閉環(huán)控制,從而提高試驗的精確性和穩(wěn)定性.
2.3.2 電機模型 由于可以通過改變電流的大小來改變直流電機的轉速,從而可以對負載進行轉速控制.由基爾霍夫電壓定律[6]可知直流力矩電機的動態(tài)方程為:

其中Um表示電機的輸入電壓,Rm表示電樞電阻,Lm表示電樞電感,Im表示通過電樞的電流,w表示電機軸的轉速,Ce表示電動勢常數(shù).根據(jù)動力學方程得:

其中M為電磁力矩,Cm表示為轉矩常數(shù),f表示為集中粘性摩擦系數(shù),ML表示為負載力矩,J為電機的轉動慣量.由剛體的轉動定律[7],電動機軸上的運動方程式為:

其中Mf為電動機軸上的負載力矩.整理得電機的微分方程:
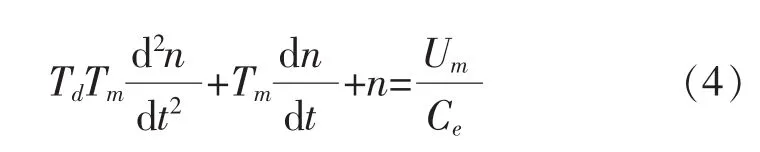
其中Td表示電樞回路的電磁時間常數(shù),Tm表示機電常數(shù),n表示電動機轉速.
2.3.3 伺服系統(tǒng)電流速度閉環(huán)設計 本系統(tǒng)采用轉速、電流雙閉環(huán)調速系統(tǒng).該調速系統(tǒng)采用三相全控橋整流電路.其中轉速外環(huán)與電流內環(huán)均采用pi控制.對于電流閉環(huán),pi調節(jié)器的傳遞函數(shù)為:

其中Ki表示電流調節(jié)器放大倍數(shù),τi表示電流調節(jié)器時間常數(shù).
根據(jù)直流電機參數(shù)τi=T1=0.036 s,整流裝置滯后時間常數(shù)Ts=0.001 7 s;取電流濾波時間常數(shù)Toi=2 ms=0.002 s,電流環(huán)時間常數(shù)之和 T∑i=Ts+Toi=0.003 7 s.
由于要求δi<5%,所以應取KIT∑i=0.5
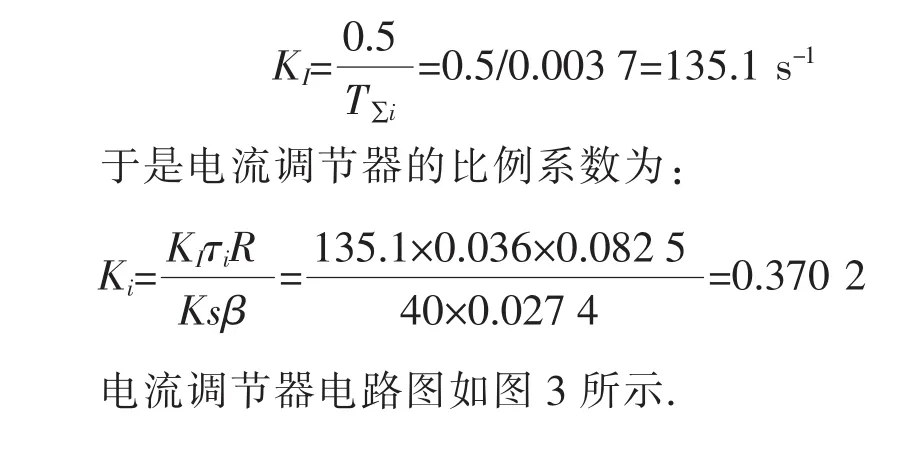
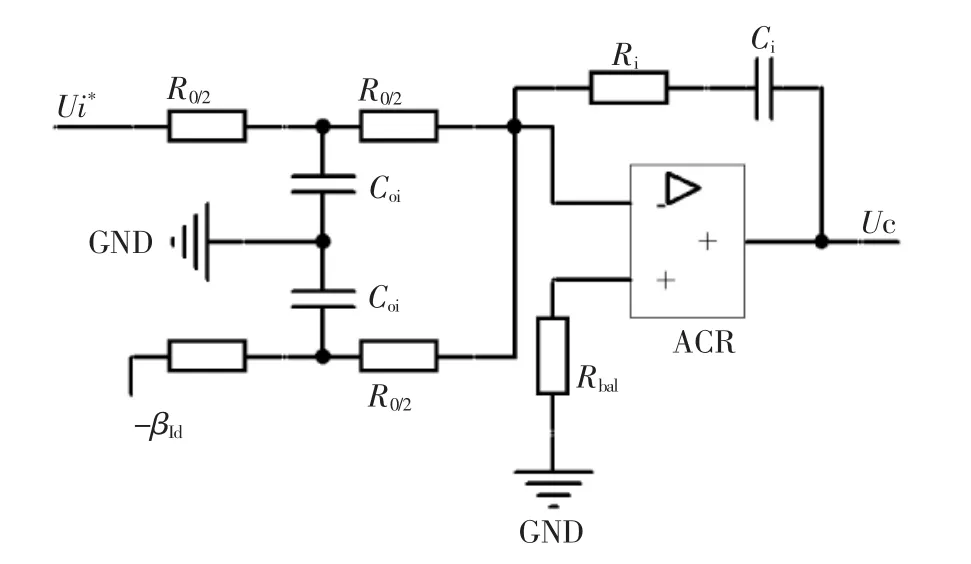
圖3 電流調節(jié)器電路圖Fig.3 A circuit diagram of the current regulator
對于轉速閉環(huán),pi調節(jié)器的傳遞函數(shù)為:

其中Kn表示速度調節(jié)器放大倍數(shù),τn表示速度調節(jié)器時間常數(shù).
電流環(huán)等效時間常數(shù)1/Ki.由前述已知,KIT∑i=0.5.則
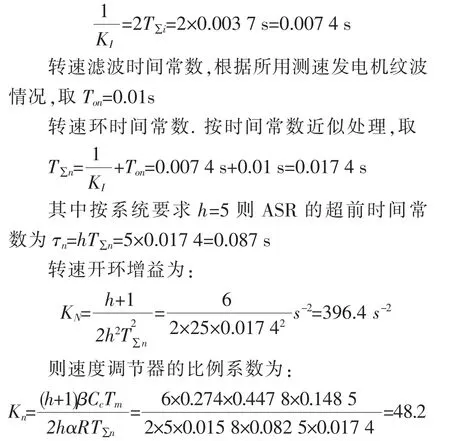
其中轉速調節(jié)器電路圖如圖4所示.
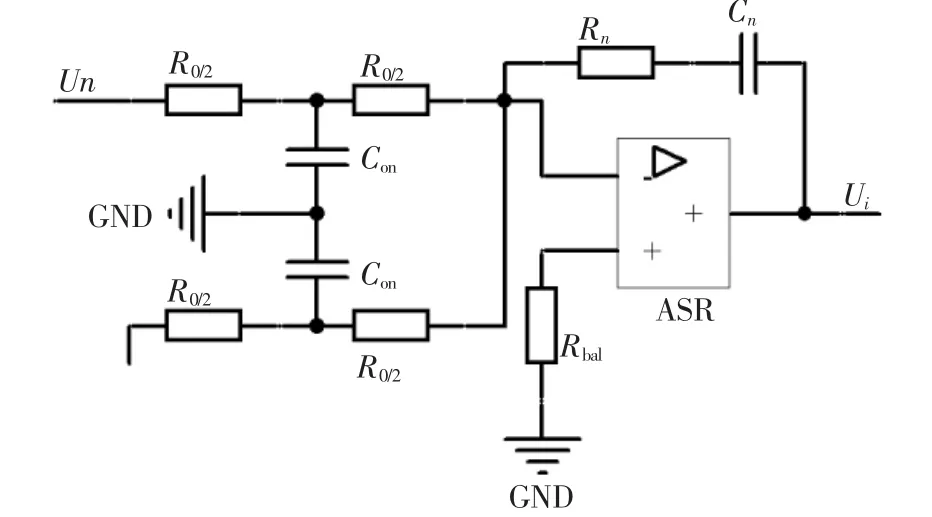
圖4 轉速調節(jié)器電路圖Fig.4 Speed regulator circuit diagram
根據(jù)上述電流、速度閉環(huán)控制系統(tǒng)的結構圖如圖5所示.
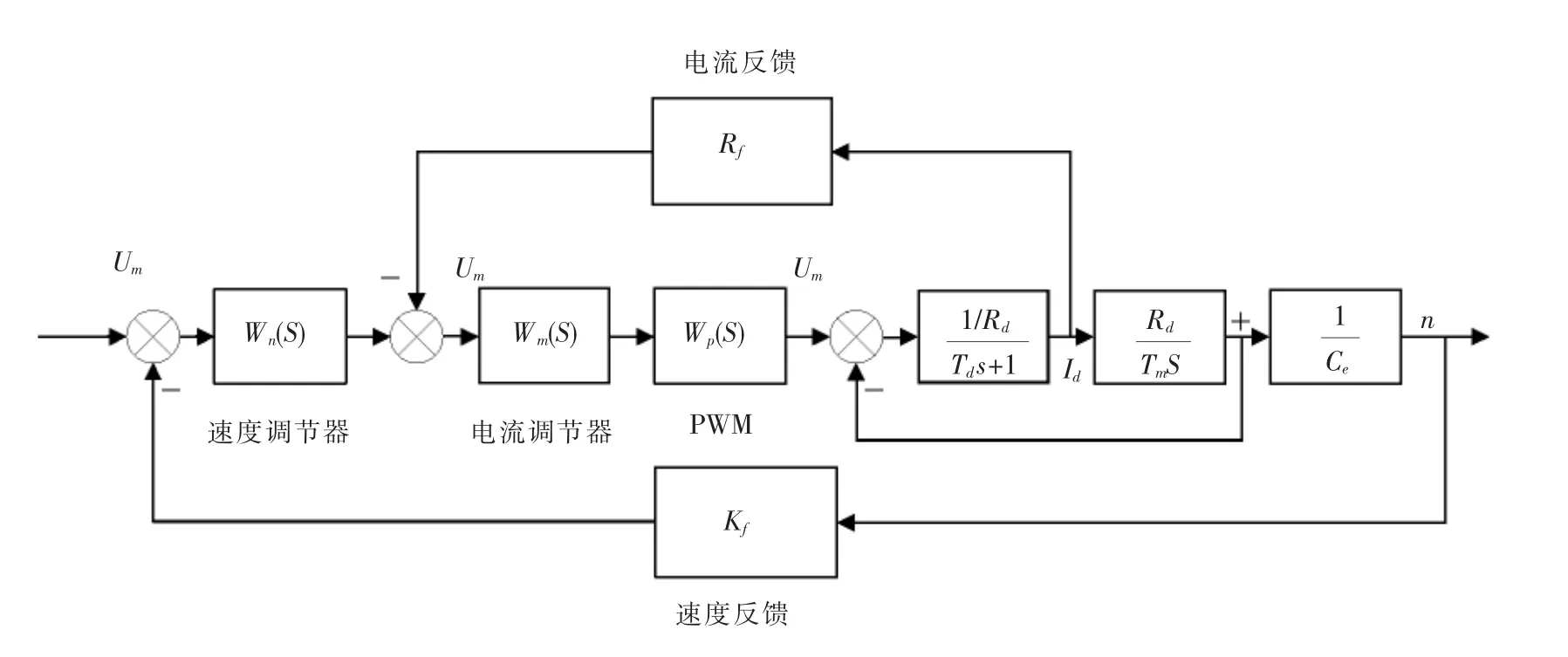
圖5 電流、速度雙閉環(huán)控制系統(tǒng)結構圖Fig.5 Structure diagram of the current and speed dual-loop control system
3 伺服控制系統(tǒng)的軟件設計
上位機軟件采用labview進行編寫.Labview可以提供給用戶友好的界面,并且在測試測量,控制領域方面具有突出的優(yōu)點,能夠圖形化顯示數(shù)據(jù)的采集和分析過程,也能對數(shù)據(jù)和負載狀態(tài)進行圖形化的管理.其編程風格也是簡單方便,能充分滿足本系統(tǒng)的測試要求.并且,本系統(tǒng)將測試采集的不同任務劃分在不同模塊中,可以根據(jù)用戶要求來簡單的增加不同的功能模塊.本系統(tǒng)軟件流程圖如圖6所示.
本軟件首先輸入初始位置和初始速度指令來控制電機運動.通過細分電路板將傳輸?shù)骄幋a器的光電信號轉換成數(shù)字信號.由采集卡進行采集,將收到的數(shù)字信號轉換成角度并在電腦上能實時顯示.根據(jù)角度的變化和比較,在重新生成新的電機運動命令來控制電機運動,使電機到達最終想要的位置和速度.
本軟件的伺服控制模塊的控制框圖如圖7所示.通過該模塊可以很好的控制負載在不同方位的運行位置.
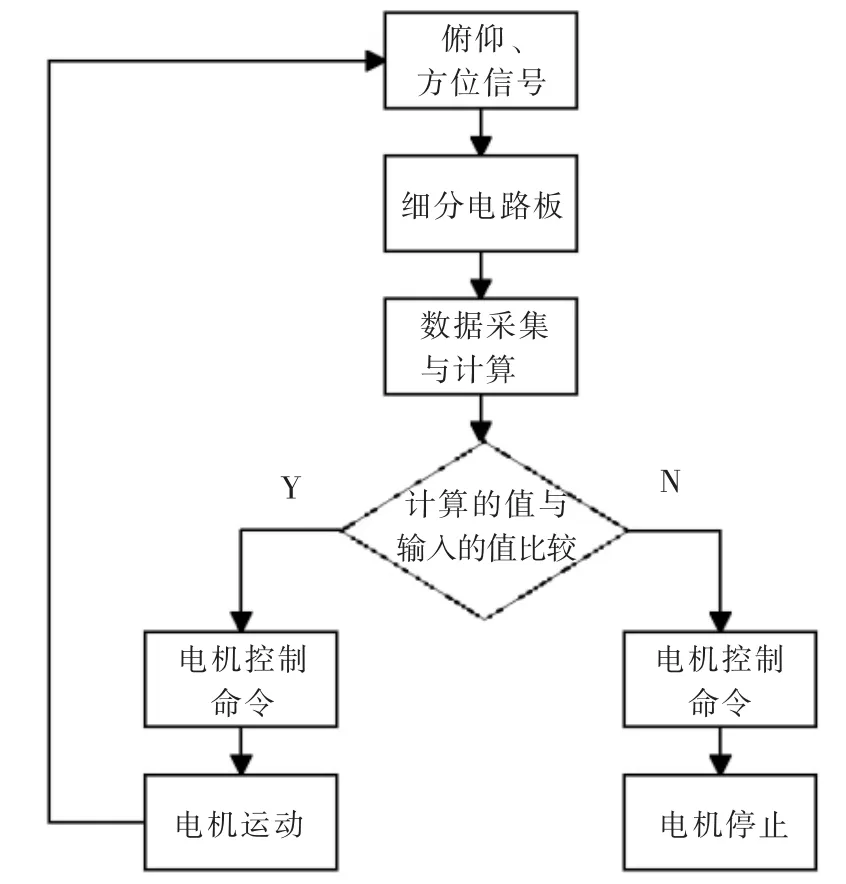
圖6 伺服系統(tǒng)軟件流程圖Fig.6 Software flow diagram of servo system

圖7 伺服控制模塊框圖Fig.7 The block diagram of Servo control
4 結 語
上述伺服系統(tǒng)是利用轉速、電流雙閉環(huán)控制回路來控制直流電動機,采用高精度的光電編碼器、細分電路板和數(shù)據(jù)采集卡來實現(xiàn)俯仰,方位和消旋方向的位置閉環(huán)控制.經過測試,該伺服系統(tǒng)能夠滿足用戶需求,并且運行穩(wěn)定,各項參數(shù)也達到目標要求.同時,這也為今后開發(fā)更高性能的伺服系統(tǒng)提供了研究基礎.
致謝
感謝湖北省教育廳科學技術研究項目提供的資金支持!
[1] 張曉青,栗書賢.永磁式直流力矩電動機穩(wěn)速系統(tǒng)設計[J].微特電機,2001,2(3):50-56.
ZHANG Xiao-qing,LI Shu-xian.Designed of a torque motor system of Permanent magnet DC [J].Micro motor,2001,2(3):50-56.(in Chinese)
[2] 尹翔陵,王愛祥.直流力矩電機在精密跟蹤雷達中的應用[J].電子工程師,2001,27(1):55-57.
YIN xiang-ling,WANG Ai-xiang.The Application of DC motors used in precision tracking radar[J].Electronics Engineer,2001,27(1):55-57.(in Chinese)
[3] 趙政春,邱飚.ATP系統(tǒng)伺服平臺的研究[J].機床與液壓,2009,6(23):25-27.
ZHENG Zhen-chun,QIU Biao.Research on platform of ATP servo system [J].Machine Tool& Hydraulics,2009,6(23):25-27.(in Chinese)
[4] 溫照方.電機與控制[M].北京:北京理工大學出版社,2004.
WEN Zhao-fang.Motor and control.[M]Beijing Institute of Technology Press,2004.(in Chinese)
[5] 李漢舟,楊世超.基于模糊PID的直流力矩電機轉速控制[J].中國慣性學報,2004,6(3).80-84.
LI Han-Zhou,YANG Shi-chao.The research of DC torque motor speed control based on fuzzy PID[J].Journal of Chinese Inertial,2004,6(3):80-84.(in Chinese)
[6] KiyoshiOhishi,TomoniriMashimo.DigitalRobust Speed Servo Systemwith Complete Avoidance of Output Saturation Effect[J].Power Conversion Conference,1997(1):501~506.
[7] STEPHAN R M,HAVN V,UNBEHAUEN H.Cascade adaptive speed control of a thyristor-driven DC motor[J].IEE processing,1988,135(1):49-55.
Servo system of stable speed control based on direct current torque motor
YU Bao-cheng1,2,3,LONG Chong1,2,WANG Chun-mei1,2,3*
1.School of Computer Science and Engineering,Wuhan Institute of Technology,Wuhan 430205,China; 2.Hubei Key Laboratory of Intelligent Robot(Wuhan Institute of Technology),Wuhan 430205,China; 3.Hubei Province Intelligent Welding Equipment Technology Research Center,Wuhan 430205,China
To make the industrial platform control the motor position fast and stably,a servo system of steady speed control based on direct current torque motor was designed.The hardware part of the system consists of a high-performance DSP controller ARINC429 communication cards,photoelectric encoder,direct current motors and data acquisition cards.ARINC429 communication cards were utilized to communicate the data. The optical encoder and data acquisition cards were used to collect and feedback position information,and the position information was lastly monitored by the upper computer.The software part was written by the language of labview.A self-define communications protocol was applied to serial communication for the upper platform and the lower platform.The upper computer sent commands to the lower computer,and the lower computer
commands and gave feedback to the upper computer after processing,enabling control of the lower platform.The application test results show that the system is reliable and can meet the basic needs of the actual project.
direct current torque motor;stable speed control;servo control;photoelectric encoder
TP275
A
10.3969/j.issn.1674-2869.2015.10.008
本文編輯:陳小平
1674-2869(2015)10-0040-05
2015-08-25
于寶成(1974-)男,河南新鄉(xiāng)人,副教授,博士.研究方向:智能機器人,機電系統(tǒng)智能監(jiān)測與控制.
猜你喜歡
工業(yè)設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32
