云密切度判定法及其在分水嶺分割中的應用
2015-06-23 13:55:30杜永貴
太原理工大學學報 2015年6期
杜永貴,李 婷
(太原理工大學 信息工程學院,太原 030024)
云密切度判定法及其在分水嶺分割中的應用
杜永貴,李 婷
(太原理工大學 信息工程學院,太原 030024)
針對傳統(tǒng)的云模型在進行概念提升時,對什么樣的子云適合進行合并沒有給出一個簡便有效的方法問題,提出了云密切度的概念,同時從云模型相對距離和交叉部分大小的角度進行了定義,形成云密切度判定方法;將使用該判定方法的云綜合算法應用于圖像分水嶺分割算法中,成功解決后者易產(chǎn)生過分割的問題。選擇兩組醫(yī)學圖像進行分割實驗,結果表明改進的分水嶺算法獲得了良好的分割效果,同時驗證了云密切度判定方法的實用性。
云模型;云密切度;分水嶺算法;圖像分割
云模型是我國著名學者李德毅院士提出的,是一種用自然語言值描述的每個定性概念與其定量數(shù)值表示之間的不確定轉換模型[1]。現(xiàn)在已經(jīng)成功地應用到圖像分割領域,秦昆等提出引入概念提取、躍升、判別的方法將云模型應用于圖像分割領域[2]。巫兆聰?shù)仁褂迷凭C合運算實現(xiàn)遙感圖像不同粒度空間下的區(qū)域合并,達到多尺度遙感影像分割的目的[3]。李萬臣等提出使用云的極大判定法則作為區(qū)域生長準則,通過概念躍升對圖像進行區(qū)域分割[4]。
云綜合運算的本質(zhì)即為云的概念躍升,是將云模型應用于圖像分割的重要步驟。該方法的基本思想是將兩朵或多朵子云進行綜合,生成一朵新的高層概念的父云。在實際應用中,關鍵問題是什么樣的子云適合進行合并,因為它直接影響了圖像的分割效果。杜鷁等給出的軟或操作算法選擇將距離最近的子云進行合并,非常簡便卻忽略了兩朵云的交叉部分大小[5]。許凱等使用了格貼進度進行判定,引入了云模型的內(nèi)積外積,判定效果增強,但是卻需要結合云的距離公式進行判定,增加了計算復雜度[6]。筆者提出了云密切度的概念,在計算兩朵子云相對距離的基礎上又考慮到了交叉部分大小,使得判定結果更加合理,且計算過程較為簡便。
基于區(qū)域的形態(tài)學分水嶺分割算法以其計算速度快,能有效的分割出圖像邊緣而被廣泛的應用于圖像分割領域。然而分水嶺在分割中極易產(chǎn)生過分割問題,生成很多細小的區(qū)域影響分割效果,因此本文將基于云密切度判定的區(qū)域合并方法引入分水嶺算法中,成功解決了這個問題,提高了圖像分割效果。
1 云密切度判定法
1.1 云模型的基本概念
定義[2]設U={x}為定量論域,T為該論域上的語言值,C為U上的定性概念,x是C的一次隨機實現(xiàn),若定量值CT(x)是x∈U在[0,1]區(qū)間上的映射,對于任意x∈U都存在穩(wěn)定傾向的隨機數(shù)CT(x),則CT(x)在論域U上的分布稱為T的隸屬云,簡稱云,記作云C(x),每個x稱為一個云滴。
云模型用3個數(shù)字特征:期望值Ex、熵En和超熵He來表達定性概念整體上的定量特征,記作C(Ex,En,He) .
期望值Ex[2]:表示云滴在論域空間中的分布期望,是數(shù)域空間中最能夠代表定性概念的點,是云滴群中云重心位置的反映。
熵En[2]:定性概念的不確定性度量,代表這個定性概念的云滴的離散程度,同時反映了概念的隨機性和模糊性并揭示了二者的關聯(lián)。
超熵He[2]:超熵是熵的不確定性的度量,即熵的熵。由熵的隨機性和模糊性共同決定。它間接反映了云的離散程度即厚度。
1.2 云密切度概念
云綜合運算就是將通過云變換算法生成的一系列子云表示的原子概念作為泛概念樹的葉子結點,然后在葉結點的基礎上,逐級進行概念躍升,生成較高層次的概念,最終生成根結點。
在概念躍升的過程中,一些算法選擇將2個相對距離最相近的云模型合并生成另一個云模型,但是在實際合并過程中兩個距離最近的云模型卻并不一定適合合并。例如,假設云模型C1(0,1,0.3),C2(10,1.5,0.1)在論域中距離最近,使用軟或操作方法對C1和C2進行合并后生成概念C(5.1,3.8,0.3)。根據(jù)云模型的“3En”規(guī)則[7],x在大于3小于5.5的范圍內(nèi)基本上既不屬于云模型C1也不屬于云模型C2,但是經(jīng)過上述概念躍升以后,此區(qū)間內(nèi)的x卻以更高的隸屬度隸屬于云模型C,這顯然并不合理[8]。為了解決這個問題,在云模型的合并過程中提出了密切度的概念。
定義 給定2個云模型C1(Ex1,En1,He1)和C2(Ex2,En2,He2),C1中云滴的橫坐標最小值與最大值分別為a,b,c2的為c,d,且Ex1

(1)
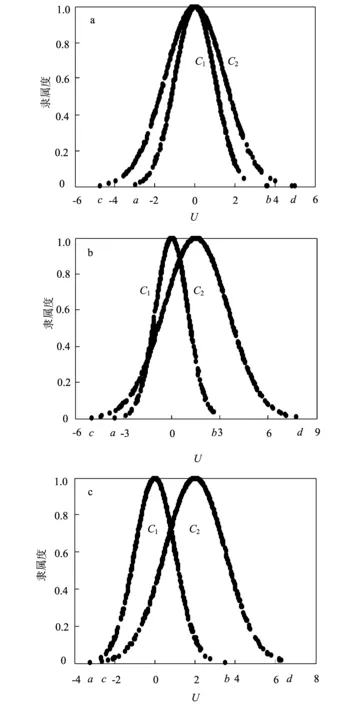
圖1 C1和C2交點示意圖
1.3 云密切度判定
兩個云模型的密切度可以反映出二者交叉部分的大小,當密切度值較大時,表明這兩個云模型的交叉面積大,進行云綜合以后可以將二者的大部分信息保留,失真部分較少,綜合以后效果良好;反之,當密切度值較小時,若強行將二者進行綜合,綜合后的部分會出現(xiàn)原有信息的大量失真,會影響分割效果。
根據(jù)正態(tài)云的“3En”規(guī)則[7],在區(qū)間[Ex-3En,Ex+3En]中的元素可以表達出99.74%的數(shù)據(jù)所代表的語言意義。如圖2所示,在此區(qū)間以外的云滴對于論域基本沒有貢獻,所以可以近似的將云滴的模坐標最大值與最小值認為是Ex-3En與Ex+3En,從而可以得到b-c近似等于(Ex1+3En1)-(Ex2-3En2),b-a和d-c分別近似等于 6En1和6En2,據(jù)此云模型密切度ρ可以表示為:
(2)

圖2 “3En”準則
密切度ρ值越大,兩個云模型的合并效果越好。而當ρ小于一定的值以后,兩個云模型合并會產(chǎn)生不理想的效果。所以在進行合并時可以引入一個合適的閾值δ,對兩朵云的密切度進行判定。當兩個正態(tài)云模型之間的密切度小于δ時,認為二者不需要進行合并。因此在構建泛概念層次時,被綜合的兩個正態(tài)云模型之間的密切度要大于δ。
2 改進的分水嶺算法
2.1 分水嶺算法
分水嶺分割算法是一種基于拓撲理論的數(shù)學形態(tài)學圖像非線性分割方法,能夠以全局形式產(chǎn)生一個明確閉合的分割區(qū)域。本文采取模擬浸水的分水嶺算法對圖像進行分割,該算法的基本思想是把圖像像素的灰度值看作是地形學上的海拔高度。假設在集水盆地局部區(qū)域最小值位置上打一個小孔,讓水從小孔中涌出逐漸淹沒整個地形,不同集水盆地中的水慢慢聚合在一起,從而劃分出不同的地形區(qū)域[9]。
該算法主要包含兩步,即排序和浸沒。第一步,將圖像中的像素按灰度值大小的升序排列;第二步,排序完成后進行浸沒處理。通過利用排序后的圖像,按圖像像素灰度值升序地訪問每一個像素點來執(zhí)行。對每一聚水盆地分配不同的標記,從整個圖像的最小像素值開始,分配標記,依次浸沒。利用先進先出(FIFO)的數(shù)據(jù)結構來擴展標記過的聚水盆地。通過一定的規(guī)則,分配分水嶺標記,完成對圖像區(qū)域的初始劃分[10]。
2.2 云模型轉換
云模型轉換就是把灰度頻率函數(shù)f(x)根據(jù)實際分布情況生成若干個大小不同的正態(tài)云的疊加,所以求取云模型的3個數(shù)字特征就成為云模型轉換的關鍵。本文采用無確定度信息的逆向云發(fā)生器,將圖像區(qū)域內(nèi)像素的灰度信息轉換成云模型。
經(jīng)過分水嶺分割后的圖像,是進行云模型轉換分析和處理的基礎。將分割后產(chǎn)生的一系列細小破碎的待合并區(qū)域作為初始對象,根據(jù)逆向云生成算法,云模型的期望Ex為對象的灰度均值;云模型的熵En由對象的一階樣本中心矩決定;而超熵He則與對象的灰度方差有關。這樣即可將圖像區(qū)域依次轉換成云模型對象,對每個云模型進行記錄,圖像也就轉換成一系列由云參數(shù)抽象描述的云模型對象,圖像區(qū)域的拓撲關系即轉換為云模型對象之間的拓撲關系[3]。
具體的轉換步驟如下:
1) 通過分水嶺分割以后,圖像包含多個待合并區(qū)域,統(tǒng)計待合并區(qū)域的個數(shù)為k,令
Ri={pi,1,pi,2,…pi‖Ri‖} (i=1,2,…k) .
(3)
式中:Ri是待合并區(qū)域i內(nèi)像素的集合;pi,k表示區(qū)域i內(nèi)的像素; ‖Ri‖表示區(qū)域i的面積大小即區(qū)域內(nèi)像素的個數(shù)。
2) 計算區(qū)域i的均值灰度為:
(4)
式中,Y(pi,k)表示像素pi,k的灰度值。
3) 計算區(qū)域i的一階樣本中心距為:

(5)
4)灰度方差為每個像素點的灰度值減去圖像平均灰度值的平方和除以總的像素個數(shù),最后開方。則區(qū)域的灰度標準差為:

(6)
5)最后根據(jù)無確定度信息的逆向云發(fā)生器的基本算法可以得到區(qū)域i的云模型數(shù)字特征:
期望值
Exi=μi;
(7)
熵值
(8)
超熵值

(9)
2.3 基于云密切度判定的區(qū)域合并
通過采用逆向云生成算法將區(qū)域內(nèi)像素的灰度信息轉換成云模型后,圖像的像素已被若干個云模型所替代。因此,相鄰區(qū)域的合并也就成為了云模型的綜合過程。
對滿足云密切度判定條件的云模型采用文獻[11]中的云綜合算法進行合并。具體方法為:選取任意一個C1,根據(jù)云模型之間的拓撲關系,對所有與云模型C1相鄰的云模型對象依次求取密切度,找到密切度最大的云模型C2,并判斷密切度是否滿足大于T,若大于則運用云綜合算法對C1,C2進行云綜合,并將這兩個云模型之間的拓撲關系重新定位;若不滿足密切度條件則暫不做任何處理,然后開始對云模型C2進行以上操作;依次循環(huán),直至對所有的云模型都完成處理,即可得到一個多尺度的分割圖像。
3 圖像分割實驗結果與分析
為了驗證改進算法的有效性,選擇了兩組醫(yī)學圖像:雙肺CT圖和腦瘤CT圖在Matlab仿真平臺上進行實驗操作,實驗中分別采用傳統(tǒng)的分水嶺算法、基于形態(tài)學開閉的分水嶺算法以及本文基于云模型的算法對圖像進行分割。實驗結果如圖3、圖4所示。

圖3 雙肺CT圖分割對比

圖4 腦瘤CT圖分割對比
從上面的實驗結果圖可以清楚地看出,不同的算法產(chǎn)生的分割效果差異很大。醫(yī)學圖像細節(jié)信息較為豐富,若直接使用傳統(tǒng)的分水嶺算法進行分割,
則會產(chǎn)生嚴重的過分割現(xiàn)象,如圖3b,圖4b所示,分割出的圖基本特征信息都很模糊,分割效果不太理想;若采用基于形態(tài)學開閉的分水嶺算法對圖像進行分割,如圖3c,圖4c所示,圖像的整體分割效果得到改善,分割出了目標區(qū)域的大致輪廓,但是部分細節(jié)區(qū)域的過分割問題還是沒有得到解決;而采用本文所提出的基于云模型的分割算法,如圖3d,圖4d所示,可以看出此分割結果成功解決了過分割問題,圖像分割效果大大提高,有效的將CT圖中的病變部分從背景中提取出來,提高了處理精度,對實際的診斷工作有很重要的意義。
分割效果還可以通過分割以后的區(qū)域數(shù)目進行度量。表1給出了雙肺CT圖采用以上各方法分割后的區(qū)域數(shù)目,表2給出了腦瘤CT圖采用以上各方法分割后的區(qū)域數(shù)目。從表中可以看出本文算法對過分割現(xiàn)象取得了最佳的抑制效果。
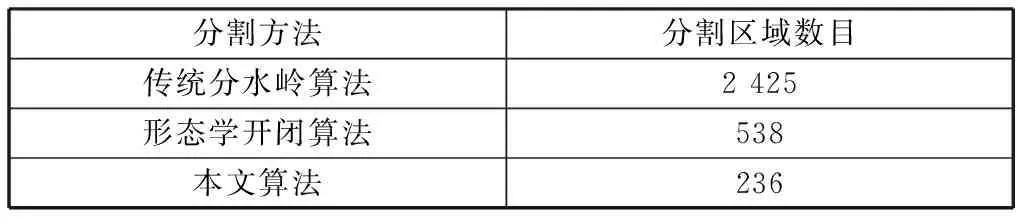
表1 雙肺CT圖用不同方法的分割區(qū)域數(shù)目
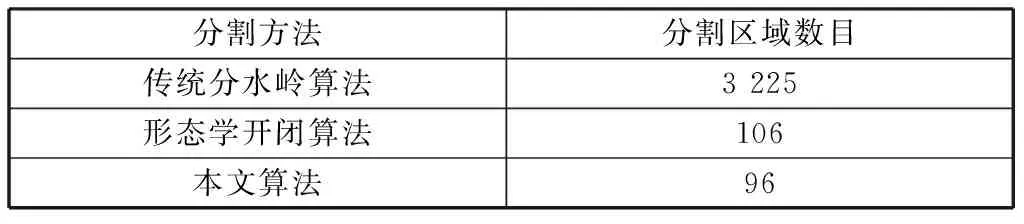
表2 腦瘤CT圖用不同方法的分割區(qū)域數(shù)目
4 結束語
提出了云密切度概念來判定相鄰子云是否適合進行云綜合,使得合并結果更加合理。將采用該判定方法的云綜合算法應用于分水嶺算法中,可以解決后者易產(chǎn)生過分割的問題,首先使用分水嶺算法對圖像進行初始分割,其次將分割后的待合并區(qū)域進行云變換,生成一系列云模型,然后對生成的云模型進行密切度判定,最后對符合判定條件的云模型進行合并。實驗表明,改進后的算法優(yōu)于傳統(tǒng)的分水嶺算法,過分割部分區(qū)域合并效果更加理想。
[1] 李德毅,孟海軍,史雪梅.隸屬云和隸屬云發(fā)生器[J].計算機研究與發(fā)展,1995,32(6):15-20.
[2] 秦昆,李德毅,許凱.基于云模型的圖像分割方法研究[J].測繪信息與工程,2006,31(5):3-5.
[3] 巫兆聰,覃茂運,張瀟.一種顧及幾何特征的云模型遙感影像分割方法[J].武漢大學學報:信息科學版,2008,33(9):939-942.
[4] 李萬臣,葛秘蕾,井志強.基于云理論的圖像分割新方法[J].應用科技,2010,37(3):45-48.
[5] 杜鷁,李德毅.基于云的概念劃分及其在關聯(lián)采掘上的應用[J].軟件學報,2001,12(2):196-203.
[6] 許凱,秦昆,劉修國,等.泛概念層次構建方法及其在遙感圖像分類中的應用[J].武漢大學學報:信息科學版,2013,38(9):1078-1081.
[7] 李萬臣,田淑娟.一種新的熵的提取方法在圖像分割中的應用[J].應用科技,2013,40(5):48-50.
[8] 蔣建兵,梁家榮,江偉,等.梯形云模型在概念劃分及提升中的應用[J].計算機工程與設計,2008,29(5):1235-1237.
[9] 朱逸婷,李新華,任慧.一種改進的分水嶺分割算法[J].安徽大學學報:自然科學版,2013,37(3):56-60.
[10] 冷美萍,鮑蘇蘇,孟祥璽.一種改進的分水嶺分割算法[J].貴州師范大學學報:自然科學版,2010,28(1):62-65.
[11] 許凱,秦昆,黃伯和,等.基于云模型的圖像區(qū)域分割方法[J].中國圖像圖形學報,2010,15(5):757-763.
(編輯:劉笑達)
Cloud Affinity Judging Method and Its Applicationin Watershed Segmentation
DU Yonggui,LI Ting
(CollageofInformationEngineering,TaiyuanUniversityofTechnology,Taiyuan030024,China)
Cloud model needs to merge cloud in concept generalizing.In traditional merge process there is a lack of a simple and effective method to decide what kind of cloudis suitable for merging.To solve this problem a new concept of cloud offinity is proposed.This concept makes the decision more reasonable because it is defined from the point of view of cloud model relative distance and cross section size.Cloud synthesis algorithm with this judgment method can successfully solve the over segmentation problem of image watershed segmentation algorithm.Choosing two groups of medical image for segmentation experiment,the results show that the improved watershed algorithm gives better segmentation effect.At the same time the practicability of affinity degree decision method is verified.
cloud model;cloud affinity;watershed algorithm;image segmentation
1007-9432(2015)06-0749-05
2015-04-01
山西省基礎研究項目:開關磁阻電機互感性及其對轉矩影響的研究(2012011027-2)
杜永貴(1959-),男,山西萬榮人,副教授,主要從事現(xiàn)代控制理論、智能控制理論研究,(Tel)13593165306, (E-mail)dyg59@163.com
TP301
A
10.16355/j.cnki.issn1007-9432tyut.2015.06.020
猜你喜歡
現(xiàn)代裝飾(2022年1期)2022-04-19 13:47:32
中老年保健(2021年12期)2021-11-30 02:58:01
現(xiàn)代裝飾(2020年2期)2020-03-03 13:37:44
攝影之友(影像視覺)(2019年2期)2019-03-05 08:27:14
中學生數(shù)理化·高一版(2018年9期)2018-10-09 06:46:48
中華詩詞(2018年11期)2018-03-26 06:41:34
中學生數(shù)理化·高一版(2017年9期)2017-12-19 12:15:14
Coco薇(2016年8期)2016-10-09 02:11:50
中國科技博覽(2016年2期)2016-04-25 20:32:39
小學生導刊(2016年34期)2016-04-11 00:49:44
