駝峰場聯(lián)鎖仿真平臺(tái)研究
2015-06-28 15:35:28陳慧琳
鐵路計(jì)算機(jī)應(yīng)用 2015年9期
陳慧琳,楊 揚(yáng)
(西南交通大學(xué) 信息科學(xué)與技術(shù)學(xué)院,成都 611756)
駝峰場聯(lián)鎖仿真平臺(tái)研究
陳慧琳,楊 揚(yáng)
(西南交通大學(xué) 信息科學(xué)與技術(shù)學(xué)院,成都 611756)
本文基于VC++6.0開發(fā)了一套駝峰場聯(lián)鎖仿真平臺(tái)。分析平臺(tái)功能和數(shù)據(jù)流程,闡述平臺(tái)的實(shí)現(xiàn)方法,簡述溜放進(jìn)路的聯(lián)鎖實(shí)現(xiàn)及溜放車組追蹤方法,提供一種控制進(jìn)路聯(lián)鎖的階段化設(shè)計(jì)思路。通過調(diào)試,軟件可滿足鐵路信號(hào)專業(yè)的教學(xué)和培訓(xùn)需要。
駝峰場;聯(lián)鎖仿真;溜放;VC++6.0
在鐵路網(wǎng)中,凡用于辦理大量貨物列車解體和編組作業(yè),并為此設(shè)置專用調(diào)車設(shè)備的車站稱為編組站。所有改編列車都要在編組站解體并重新組成新的列車出發(fā)。編組站的工作質(zhì)量和改編作業(yè)效率,對(duì)整個(gè)鐵路網(wǎng)的通過能力、改編能力、作業(yè)安全、機(jī)車車輛周轉(zhuǎn)、勞動(dòng)條件等都起著重要作用。隨著鐵路運(yùn)能緊張問題日益突出,編組站作業(yè)也越來越繁忙,駝峰調(diào)車自動(dòng)化在提高作業(yè)效率、保證作業(yè)安全、降低勞動(dòng)強(qiáng)度等方面起著舉足輕重的作用,是鐵路編組站向現(xiàn)代化發(fā)展的主要內(nèi)容和重要標(biāo)志。為此,研究駝峰場的聯(lián)鎖仿真軟件具有重要意義。駝峰場計(jì)算機(jī)聯(lián)鎖應(yīng)用到編組站駝峰自動(dòng)化控制系統(tǒng)中,可提高作業(yè)效率、降低勞動(dòng)強(qiáng)度,保障作業(yè)安全、可靠;該仿真研究在現(xiàn)場技術(shù)人員的培訓(xùn)及鐵路信號(hào)專業(yè)的教學(xué)中,能夠增強(qiáng)教學(xué)實(shí)踐性,提高學(xué)員專業(yè)技能。
1 系統(tǒng)功能
本聯(lián)鎖仿真系統(tǒng)是基于Visual C++6.0開發(fā)的面相對(duì)象設(shè)計(jì)的軟件。仿真系統(tǒng)的功能結(jié)構(gòu)如圖1所示。系統(tǒng)接收人機(jī)交互軟件(上位機(jī)軟件)發(fā)來的操作命令,進(jìn)行聯(lián)鎖邏輯運(yùn)算,模擬設(shè)備動(dòng)作,將設(shè)備動(dòng)態(tài)信息(I/O信息)反饋給上位機(jī)軟件。軟件主要包括聯(lián)鎖邏輯運(yùn)算和仿真模擬兩個(gè)模塊。其中,聯(lián)鎖邏輯運(yùn)算分為溜放進(jìn)路聯(lián)鎖邏輯運(yùn)算、調(diào)車進(jìn)路聯(lián)鎖邏輯運(yùn)算和非進(jìn)路聯(lián)鎖邏輯運(yùn)算3個(gè)方面。

圖1 聯(lián)鎖仿真系統(tǒng)功能結(jié)構(gòu)圖
溜放進(jìn)路依據(jù)溜放計(jì)劃辦理,駝峰信號(hào)機(jī)開放不同的信號(hào)顯示。溜放過程中,根據(jù)作業(yè)計(jì)劃及車組走行實(shí)跡自動(dòng)控制各分路道岔轉(zhuǎn)換,保證車組進(jìn)入預(yù)定股道。溜放結(jié)束后給出相應(yīng)表示。
調(diào)車進(jìn)路按壓始終端按鈕辦理,檢查聯(lián)鎖條件,自動(dòng)轉(zhuǎn)換道岔、開放信號(hào)。隨車列的走行,信號(hào)自動(dòng)關(guān)閉、進(jìn)路解鎖。調(diào)車進(jìn)路在信號(hào)開放后、車列尚未占用接近區(qū)段前可辦理取消進(jìn)路解鎖;信號(hào)開放后、車列已占用接近區(qū)段但尚未越過信號(hào)機(jī)時(shí),可辦理人工解鎖方式解鎖。
非進(jìn)路聯(lián)鎖作業(yè)一般是對(duì)某個(gè)單一信號(hào)設(shè)備的操作,包括對(duì)道岔的單操、單鎖、單封、解封及故障解鎖,模擬信號(hào)機(jī)燈絲斷絲,模擬軌道區(qū)段故障占用和故障出清等。
由于本仿真軟件未連接硬件設(shè)備,其仿真部分是通過軟件不斷讀寫INPUT表和OUTPUT表實(shí)現(xiàn)的。聯(lián)鎖軟件聯(lián)鎖邏輯運(yùn)算后更新OUTPUT表,模擬現(xiàn)場驅(qū)動(dòng);根據(jù)OUTPUT表的變化,對(duì)INPUT表中相應(yīng)位置值模擬采集板;把更新后的INPUT表和OUTPUT表都反饋給上位機(jī),以實(shí)現(xiàn)上位機(jī)的實(shí)時(shí)顯示。
2 系統(tǒng)工作流程
根據(jù)軟件結(jié)構(gòu)設(shè)計(jì)和數(shù)據(jù)流程,軟件啟動(dòng)后,首先初始化變量、函數(shù)、配置文件和TCP/IP通信,隨后聯(lián)鎖軟件將站場的初始化設(shè)備狀態(tài)及仿真的采集驅(qū)動(dòng)數(shù)據(jù)發(fā)送至上位機(jī)軟件實(shí)現(xiàn)站場初始化顯示。系統(tǒng)接收并解析上位機(jī)軟件下達(dá)的作業(yè)命令,并根據(jù)當(dāng)前站場設(shè)備狀態(tài)進(jìn)行聯(lián)鎖邏輯運(yùn)算后將各類信息整合反饋給上位機(jī)軟件,上位機(jī)軟件的界面將實(shí)時(shí)動(dòng)態(tài)地顯示聯(lián)鎖系統(tǒng)的仿真結(jié)果。當(dāng)檢查到程序退出時(shí),軟件釋放內(nèi)存,退出系統(tǒng)。系統(tǒng)工作流程如圖2所示。

圖2 聯(lián)鎖軟件工作流程圖
3 系統(tǒng)實(shí)現(xiàn)
由圖2可知,系統(tǒng)軟件可劃分為聯(lián)鎖數(shù)據(jù)結(jié)構(gòu)、聯(lián)鎖邏輯運(yùn)算和通信數(shù)據(jù)組織3個(gè)模塊,分別就這3個(gè)模塊詳述系統(tǒng)軟件的實(shí)現(xiàn)方法。
3.1 聯(lián)鎖數(shù)據(jù)及數(shù)據(jù)結(jié)構(gòu)
在計(jì)算機(jī)聯(lián)鎖中參與聯(lián)鎖運(yùn)算的數(shù)據(jù)稱為聯(lián)鎖數(shù)據(jù)。本研究所有聯(lián)鎖配置數(shù)據(jù)寫在TXT文件中,采用靜態(tài)數(shù)據(jù)和動(dòng)態(tài)數(shù)據(jù)兩種數(shù)據(jù)形式。
所謂靜態(tài)數(shù)據(jù),即在系統(tǒng)中僅以讀取方式操作而不做改寫。對(duì)站場中出現(xiàn)的每一個(gè)信號(hào)設(shè)備,如道岔、信號(hào)機(jī)和軌道區(qū)段等,都設(shè)置相應(yīng)的靜態(tài)數(shù)據(jù),包括設(shè)備ID、名稱、左右位置關(guān)系、設(shè)備類型、所在咽喉等,程序中對(duì)各信號(hào)設(shè)備創(chuàng)建類并定義數(shù)組,存儲(chǔ)相應(yīng)靜態(tài)數(shù)據(jù)。針對(duì)溜放進(jìn)路編寫包括溜放進(jìn)路上的分路道岔及敵對(duì)始端信號(hào)機(jī)的溜放進(jìn)路表,以便接收溜放命令后匹配進(jìn)路表并及時(shí)自動(dòng)排列溜放進(jìn)路。
動(dòng)態(tài)數(shù)據(jù)不斷被程序訪問并隨聯(lián)鎖邏輯而改寫。本仿真軟件編寫具有0-1狀態(tài)的INPUT表和OUTPUT表,模擬6502電氣集中里的繼電器,例如信號(hào)機(jī)有DJ、DXJ、LXJ等,道岔有DBJ、FBJ、DCJ、FCJ等,軌道區(qū)段有DGJ等。通過讀取INPUT表獲取當(dāng)前站場各設(shè)備狀態(tài),結(jié)合作業(yè)命令進(jìn)行聯(lián)鎖邏輯運(yùn)算后對(duì)OUTPUT表置位,以此操作設(shè)備。
3.2 聯(lián)鎖邏輯運(yùn)算
系統(tǒng)的聯(lián)鎖邏輯處理包括溜放進(jìn)路聯(lián)鎖處理、調(diào)車進(jìn)路聯(lián)鎖處理和非進(jìn)路聯(lián)鎖處理3類。下面詳細(xì)分析這3類作業(yè)的聯(lián)鎖實(shí)現(xiàn)方式。
3.2.1 溜放進(jìn)路聯(lián)鎖處理
溜放信號(hào)開放流程圖如圖3所示。溜放信號(hào)開放前,應(yīng)將峰下第一分路道岔轉(zhuǎn)換至第一溜放車組所需位置并鎖閉道岔。駝峰信號(hào)機(jī)的防護(hù)范圍是自到達(dá)場股道經(jīng)到達(dá)場出站咽喉區(qū)進(jìn)入駝峰調(diào)車場的推送部分、峰頂平臺(tái)、溜放部分直至各條調(diào)車線,其信號(hào)顯示方式:綠燈表示按規(guī)定速度推送;綠閃表示加速推送;黃閃表示減速推送;紅閃指示機(jī)車車輛自駝峰后退;白閃指示機(jī)車去禁溜線;白燈指示機(jī)車到峰下;黃燈表示預(yù)先推送;紅燈表示停車。
溜放開始后,軟件對(duì)下溜車組進(jìn)行全程跟蹤,根據(jù)作業(yè)計(jì)劃及車組的走行位置逐級(jí)傳遞命令,自動(dòng)控制道岔轉(zhuǎn)換,使車組進(jìn)入預(yù)定軌道。當(dāng)車組占用某一道岔區(qū)段后,開始節(jié)點(diǎn)搜索自動(dòng)匹配到下一道岔區(qū)段,將道岔轉(zhuǎn)換到所需位置并鎖閉。
3.2.2 調(diào)車進(jìn)路聯(lián)鎖處理
調(diào)車進(jìn)路作業(yè)包括進(jìn)路選排、解鎖、取消進(jìn)路、人工解鎖等。下面舉例詳述進(jìn)路選排的聯(lián)鎖處理方式。
系統(tǒng)收到選路命令后:(1)確定進(jìn)路始終端、進(jìn)路方向并記錄該進(jìn)路。(2)以節(jié)點(diǎn)搜索的方式對(duì)該進(jìn)路上每一個(gè)信號(hào)設(shè)備分成若干個(gè)階段處理。
ROUTEPROVE階段從進(jìn)路終端開始,檢查進(jìn)路中各信號(hào)設(shè)備是否故障或被其它進(jìn)路占用;SETMARK階段從進(jìn)路終端開始,給各信號(hào)設(shè)備置占用標(biāo)記,選出進(jìn)路中所有信號(hào)機(jī)、道岔和軌道區(qū)段;BEFORELOCK從終端開始檢查進(jìn)路中道岔位置并將道岔轉(zhuǎn)換到所需位置;SETLOCK階段從始端開始鎖閉進(jìn)路中各道岔及軌道區(qū)段;CLEARSIGNAL階段從進(jìn)路終端開始檢查信號(hào)機(jī)的開放條件,由遠(yuǎn)及近開放信號(hào)。
3.2.3 非進(jìn)路聯(lián)鎖處理
非進(jìn)路聯(lián)鎖作業(yè)一般是對(duì)某個(gè)單一信號(hào)設(shè)備的操作。操作道岔時(shí),先檢查該道岔未標(biāo)記或未鎖閉,再單獨(dú)對(duì)其進(jìn)行或轉(zhuǎn)換或鎖閉等操作(峰下道岔應(yīng)迅速轉(zhuǎn)換而不延時(shí))。模擬信號(hào)機(jī)和軌道區(qū)段故障時(shí),接收故障命令后直接給INPUT、OUTPUT表中相關(guān)繼電器置位,如DSJ、DGJ等。
3.3 通信數(shù)據(jù)組織
系統(tǒng)完成聯(lián)鎖處理后將站場信號(hào)設(shè)備狀態(tài)及采集、驅(qū)動(dòng)信息及時(shí)更新至上位機(jī)以實(shí)時(shí)顯示。其中,采集、驅(qū)動(dòng)信息上文已有介紹,信號(hào)設(shè)備狀態(tài)指該設(shè)備正處于進(jìn)路處理的哪個(gè)階段。在聯(lián)鎖處理中記錄設(shè)備情況,上位機(jī)用來繪制不同狀態(tài)下的信號(hào)設(shè)備。信號(hào)機(jī)的狀態(tài)有標(biāo)記、鎖閉、閃光、延時(shí)180s、延時(shí)30s等,道岔的狀態(tài)有標(biāo)記、鎖閉、失去表示等,軌道區(qū)段的狀態(tài)有標(biāo)記、鎖閉、占用等。
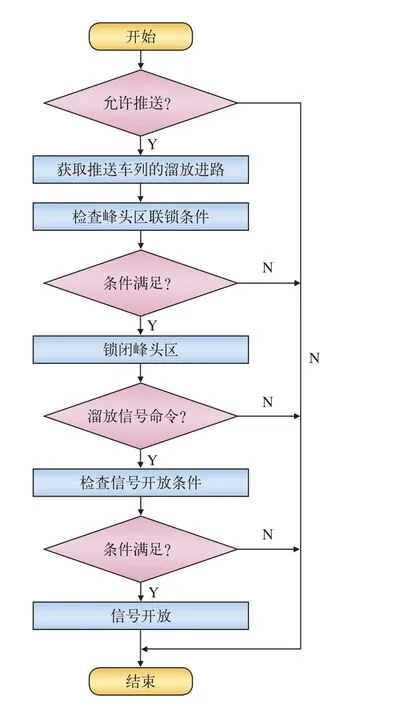
圖3 信號(hào)開放流程圖
4 結(jié)束語
本文在Windows平臺(tái)下,以VC++為開發(fā)工具,采用模塊化設(shè)計(jì),研究開發(fā)了一套功能強(qiáng)、造價(jià)低、靈活性較高的駝峰場聯(lián)鎖仿真軟件,經(jīng)過多次試驗(yàn)與調(diào)試,軟件運(yùn)行穩(wěn)定,具備一定的完整性和通用性,可基本滿足鐵路信號(hào)工作人員的學(xué)習(xí)和培訓(xùn)需求。
[1] 吳芳美.編組站調(diào)車自動(dòng)控制[M].北京:中國鐵道出版社,1995.
[2] 楊 揚(yáng).車站信號(hào)控制系統(tǒng)[M].成都:西南交通大學(xué)出版社,2012.
[3] 孫 鑫,余安萍.VC++深入詳解[M].北京:電子工業(yè)出版社,2006.
[4] 宋玉華.鐵路編組站駝峰自動(dòng)化試驗(yàn)[J].鐵道建筑技術(shù),2012(5).
[5]王中林,劉忠信,吳 垠,等.基于無線網(wǎng)絡(luò)的多智能體系仿真系統(tǒng)的設(shè)計(jì)[J].計(jì)算機(jī)工程與設(shè)計(jì),2014(11).
[6]齊志華,姚亞平,高術(shù)強(qiáng).基于CAN通信的計(jì)算機(jī)聯(lián)鎖IO仿真系統(tǒng)設(shè)計(jì)[J].鐵路通信信號(hào),2013(11).
責(zé)任編輯 方 圓
Interlocking simulation platform of hump marshalling yard
CHEN Huilin, YANG Yang
( School of Information Science and Technology, Southwest Jiaotong University, Chendu 611756, China )
The article developed an interlocking simulation platform of hump marshalling yard, analyzed the functions, dataflow and implementation method of the platform, described the interlocking implementation of free rolling route and tracing method for free rolling cars, provided stage design idea of controlling route interlocking. Through repeatedly debugging, this software could meet the needs of railway signal professional teaching and training.
hump marshalling yard; interlocking simulation; free rolling; VC++6.0
U284.3∶TP39
A
1005-8451(2015)09-0040-03
2015-01-06
中國鐵路總公司科技研究計(jì)劃項(xiàng)目(2013X012-A-1,2013X012-A-2,2013X008-A)。
陳慧琳,在讀碩士研究生;楊 揚(yáng),副教授。
猜你喜歡
中國特種設(shè)備安全(2022年6期)2022-09-20 02:52:28
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評(píng)價(jià)·高一版(2020年6期)2020-11-02 02:45:24
少年博覽·初中版(2020年6期)2020-06-12 11:42:23
電子制作(2018年11期)2018-08-04 03:26:08
電子制作(2018年11期)2018-08-04 03:25:42
故事大王(2016年7期)2016-09-22 17:30:08
工業(yè)設(shè)計(jì)(2016年12期)2016-04-16 02:52:00
鑿巖機(jī)械氣動(dòng)工具(2016年3期)2016-03-01 04:00:25
消費(fèi)者報(bào)道(2014年7期)2014-07-31 11:23:57
