三維織機雙向開口機構的虛擬樣機研究*
2015-07-01 23:31:45王益軒韓斌斌陳榮榮
產業用紡織品 2015年12期
趙 梅 王益軒 路 超 韓斌斌 陳榮榮
(西安工程大學機電工程學院, 西安,710048)
三維織機雙向開口機構的虛擬樣機研究*
趙 梅 王益軒 路 超 韓斌斌 陳榮榮
(西安工程大學機電工程學院, 西安,710048)
構建用于織造完全交織的三維機織預制件的雙向開口機構的原理模型,介紹其工作原理并進行仿真設計。建立雙向開口機構的虛擬樣機模型并進行仿真設計,以研究雙向開口機構的運動規律。在ADAMS中仿真時,以織造雙向平紋預制件為例,通過合理控制伺服電機,達到了織造要求并得到了較好的開口機構運動規律,為三維機織預制件的織造提供了參考。
三維織機,雙向開口機構,虛擬樣機,ADAMS
近年來,先進紡織復合材料預制件廣泛應用于各行各業,對復合材料預制件的形狀和力學性能要求也越來越高。一些特殊紡織復合材料預制件的應用除了要求具有特定的性能,如高交織度和合適定向連續紗線之外,還要求具有復雜或非常規的外形。傳統織機只能實現一些規則外形預制件的織造,要得到任何所需形狀紡織復合材料的預制件,只有通過在高交織度的織物塊上裁剪,并且要求不會松散。紡織復合材料預制件使用這種方法較容易得到并且具有較好的力學性能,這一進步在預制件生產中具有相當大的優勢[1]。
完全交織的織物塊又稱作網格狀織物塊,它是由多層經紗和兩組正交的緯紗相互交織而成的。要織出這種網格狀織物結構,織造過程中開口機構要采用雙向開口方式。Nandan Khokar[2]提出了使織物的多層經紗與兩組正交緯紗充分交織的三維織造技術,該技術不但可以形成織物寬度方向的橫向開口,而且可以形成織物厚度方向的縱向開口,當橫、縱向開口形成后引入緯紗,這樣交替進行可以織出完全交織的三維織物。在此基礎上提出了三維織機采用雙向開口方式[2]。
本文主要介紹了三維織機上的開口機構,建立了采用雙向開口機構的虛擬樣機模型并進行了仿真設計。根據傳統綜框的標準,設計了長為1 800 mm、 寬為1 360 mm、厚為13.5 mm的綜框。兩個方向都采用多頁綜框的形式,在兩個方向的開口機構上各安裝了8頁綜框。由于穿過兩個方向的綜框的紗線既要作水平運動又要作豎直運動,因此,綜框上的綜眼、綜絲都比較特殊。兩個方向的開口機構都采用了電子開口機構。根據設計的綜框尺寸,在Pro/E中建立了雙向開口機構的虛擬樣機模型,將建立好的三維模型通過數據轉換接口導入到ADAMS中,在ADAMS中建立了參數化電子開口機構的虛擬樣機模型并進行了優化,得到了各桿件的尺寸。仿真時以織造雙向平紋織物為主,研究雙向綜框的運動規律。
1 雙向開口機構織造法
利用雙向開口織造法提高了織物組織的復雜程度,可以更好地滿足產業用紡織品的需求,尤其是一些尖端科學領域。雙向開口織造法使得平紋、斜紋、緞紋等組織可以進行自由組合,例如雙向平紋、一向斜紋一向平紋、一層斜紋一層平紋、一向平紋一向緞紋等,這樣織造出的織物具有廣泛的應用性。
三維織機采用雙向開口機構可以織造出高交織度的織物塊。多層經紗分別形成縱向開口和橫向開口,引入兩組正交緯紗,多層經紗的選定經紗基本上為直線,而其余一些與兩組正交緯紗交織的紗線呈螺旋形,這樣得到的織物是網格狀結構。以織造雙向平紋織物為例,說明雙向開口機構織造法。圖1為雙向開口機構的開口形成過程,圖2為得到的雙向平紋織物組織圖。
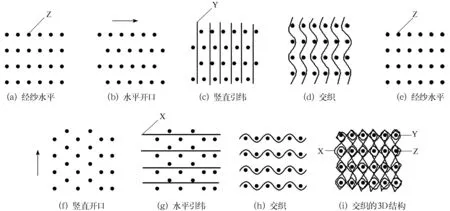
圖1 雙向開口形成過程
圖中Z為水平經紗,X、 Y為相互垂直的兩組緯紗。圖1(a)中的經紗穿過綜框上綜眼呈多層水平狀態,水平運動綜框向右運動時,穿過水平運動綜框的經紗隨著綜框一起移動,這樣就與不移動的經紗形成了水平開口,如圖1(b)所示。將豎直緯紗引入,這時水平綜框再向左移動,回到初始位置,這樣豎直緯紗與多層經紗交織起來,如圖1(d)所示。豎直運動的綜框向上運動時,穿過豎直運動綜框的經紗隨著綜框一起移動,這就與不移動的經紗形成了豎直開口,如圖1(f) 所示。將水平緯紗引入,這時豎直綜框再向下移動,回到初始位置,這樣水平緯紗就與多層經紗交織起來,如圖1(h)所示。同樣,水平運動綜框再向左移動,引入豎直緯紗,豎直運動綜框再向下移動,引入水平緯紗,形成完全交織的織物組織,如圖1(i)所示[3]。
利用這種織造法可以織造出高交織度、高整合度的織物塊,任何所需形狀的紡織復合材料預制件都可以從其上裁剪出來,并且裁剪下來的預制件不再需要在外表面進行任何接結操作以提高織物的整體性。雙向開口機構織造法極大地簡化和加速了紡織復合材料預制件的生產[4]。
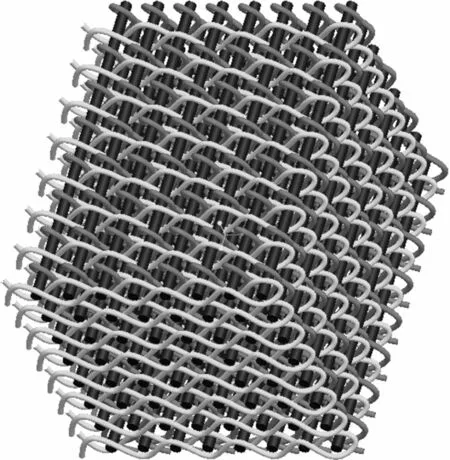
(a) 立體圖
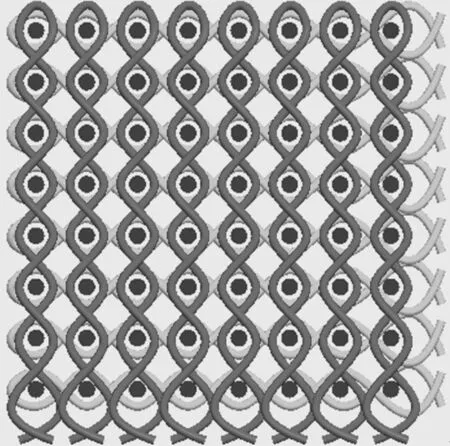
(b) 經向圖
2 雙向開口機構的工作原理
和普通的2D織機開口機構一樣,雙向平紋開口機構也有幾種形式,機械式(連桿機構、凸輪機構)、電子式(伺服電機傳動)。本文構造的雙向開口機構的基本原理如圖3所示。
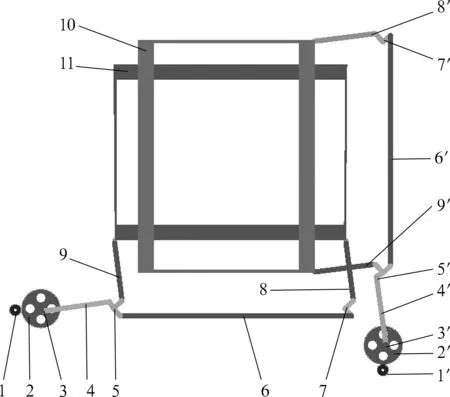
1、 1′—小齒輪; 2、 2′—大齒輪; 3、 3′ —曲柄; 4、 4′—連桿; 5、 5′—三臂擺桿; 6、 6′—連桿; 7、 7′—二臂擺桿; 8、 8′、 9、 9′—綜框連桿; 10—水平運動綜框; 11—豎直運動綜框圖3 雙向開口機構的工作原理圖
圖3中的雙向開口機構由曲柄3、連桿4、三臂擺桿5和機架組成的曲柄搖桿機構,三臂擺桿5、綜框連桿9、綜框11和機架組成的曲柄滑塊機構,以及三臂擺桿5、連桿6、二臂擺桿7和機架組成的平行四邊形機構三個機構組成。伺服電機的驅動力矩通過聯軸器傳遞給小齒輪1;通過小齒輪1和大齒輪2的嚙合,驅使與大齒輪同軸固定的曲柄3(即偏心盤)作整周轉動;曲柄3通過連桿4帶動三臂擺桿5擺動;三臂擺桿5通過綜框連桿9使安裝在其上的綜框11作上下開口運動。另一個方向的機構與驅動上下運動綜框的機構完全相同,只是綜框10作水平運動,兩個方向運動的綜框在兩個平行的平面內。每頁綜框都由獨立的伺服電機單獨驅動。通過多功能操作盤不僅可對開口形式,還可對每頁綜框的靜止角、閉口時間等進行設定。
3 開口機構的虛擬樣機模型及仿真
首先在Pro/E中建立雙向開口機構,兩個方向各安裝8頁綜框,如圖4所示。建立的三維模型通過數據轉換接口導入到ADAMS中,添加約束和參數化設置后的仿真模型如圖5所示。
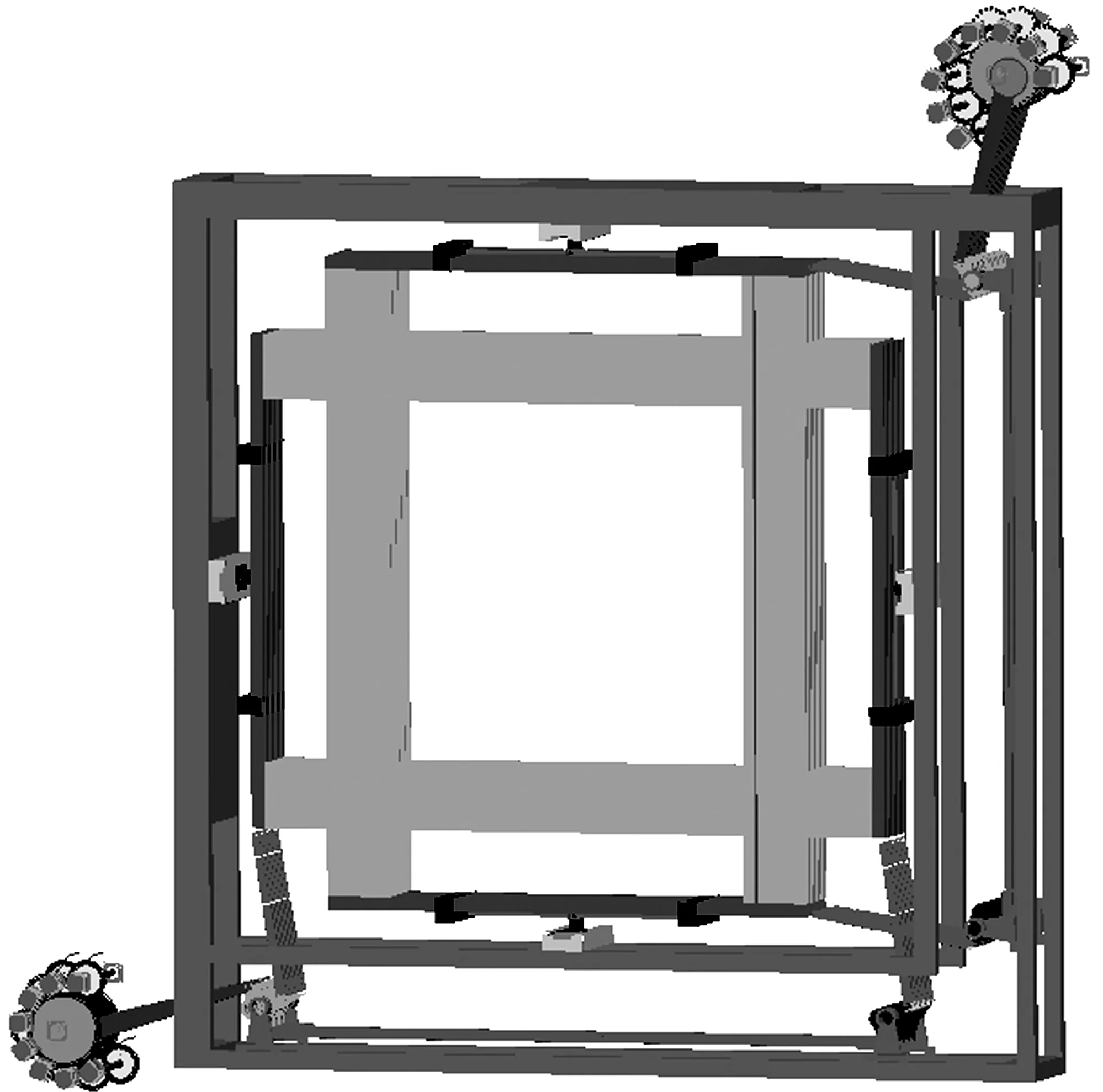
圖4 雙向開口機構的虛擬樣機模型
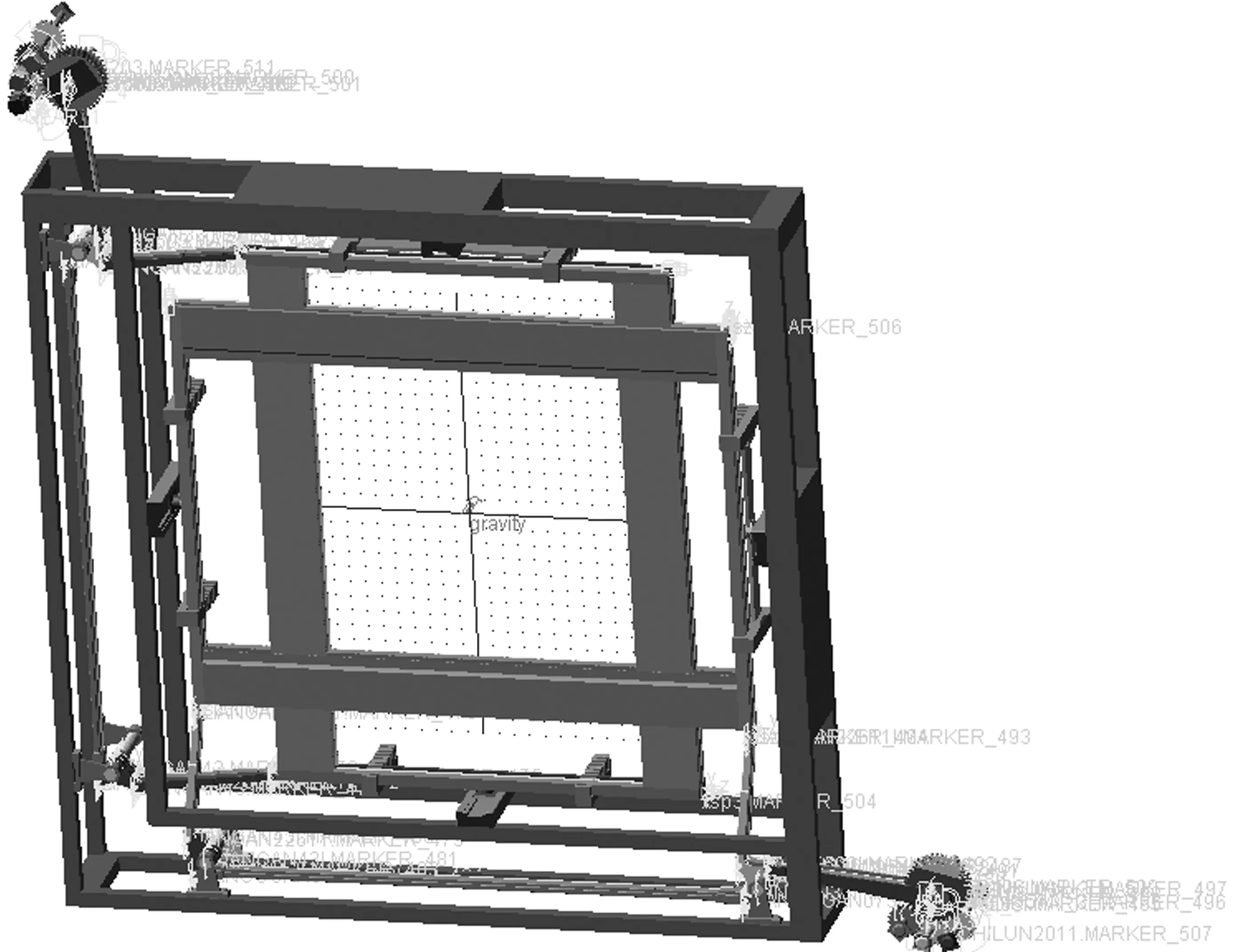
圖5 添加約束和參數化設置后的仿真模型
4 仿真分析與設計
為簡單起見,本文只對3對綜框進行了仿真,即水平方向3頁綜框和豎直方向3頁綜框。水平方向各綜框的動程相同,豎直方向各綜框的動程也相同,這樣有利于形成清晰的多層梭口,使得多劍桿引緯順利進行。仿真時根據織物組織結構的不同,每臺伺服電機的運行函數可以設置不同,但同時同方向旋轉的電機的轉速應該相同,這樣就能保證形成清晰的梭口。
根據織造織物組織的不同,需要給伺服電機添加不同的運行函數。織造的織物組織越復雜,需要的綜框頁數越多,編寫運行函數也越難。在此以織造雙向平紋織物為例,說明兩個方向綜框的運動規律。兩個方向的綜框都安裝在總動程的中心位置,將控制水平運動綜框的伺服電機的轉速設置為:
step(time,0,0,2,0)+step(time,2,0,4,175d)+step(time,4,0,6,0) +step(time,6,0,8,162d);
將控制豎直運動綜框的伺服電機的轉速設置為:
step(time,0,0,2,174d)+step(time,2,0,4,0)+step(time,4,0,6,187d)+step(time,6,0,8,0) 。
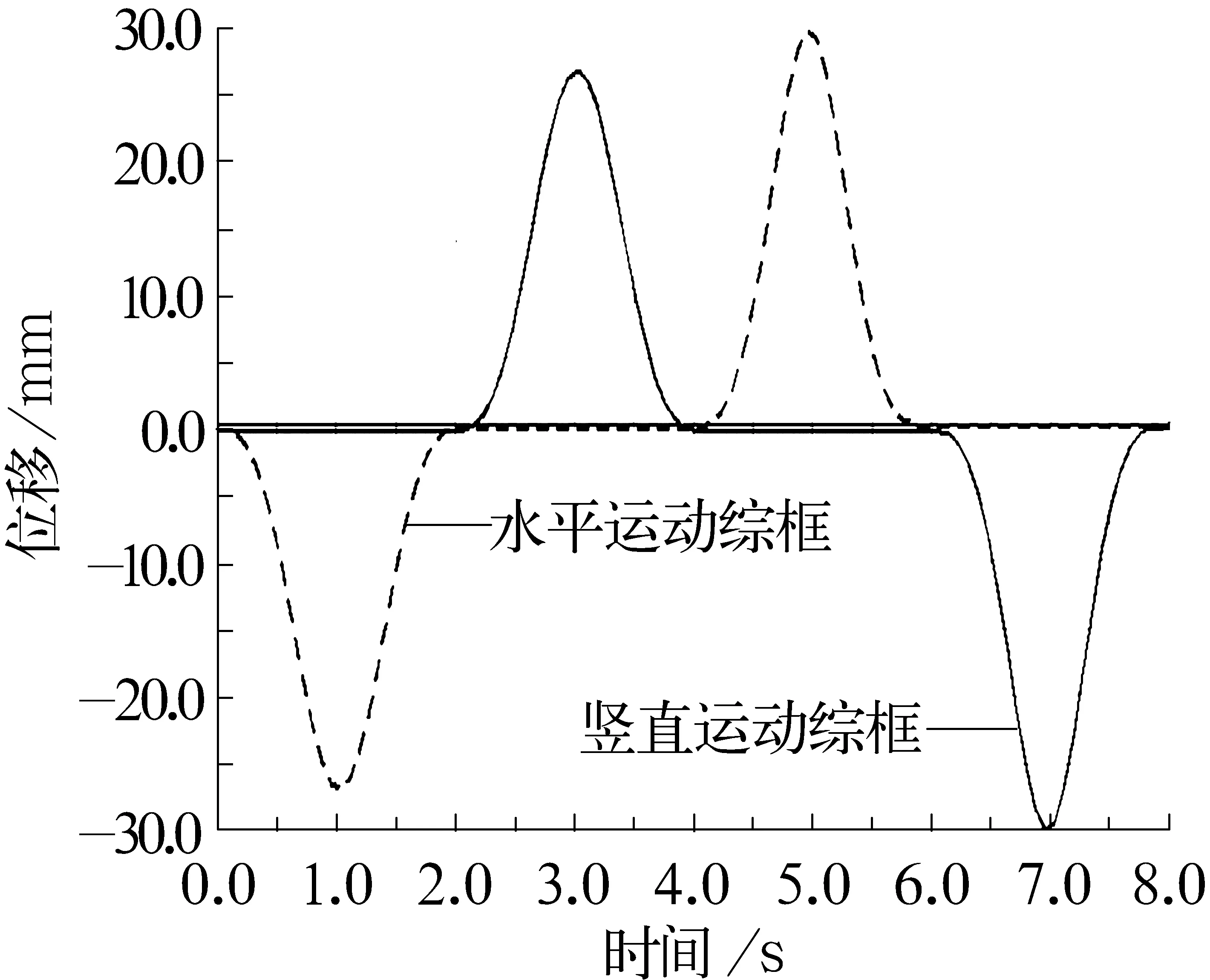
仿真時間設置為8 s。在8 s內兩個方向的綜框各完成了一個運動周期,如圖6所示。織造過程完成一個周期需要四步:①水平運動綜框向右運動,豎直運動綜框靜止,多層梭口形成后引入豎直緯紗,水平綜框回到初始位置;②水平運動綜框靜止,豎直運動綜框向上運動,多層梭口形成后引入水平緯紗,豎直綜框回到初始位置;③水平運動綜框向左運動,豎直運動綜框靜止,多層梭口形成后引入豎直緯紗,水平運動綜框回到初始位置;④水平運動綜框靜止,豎直運動綜框向下運動,多層梭口形成后引入水平緯紗,豎直運動綜框回到初始位置。從圖6中可以看出,綜框的運動規律服從簡諧運動。
(a) 位移
(b) 速度
(c) 加速度
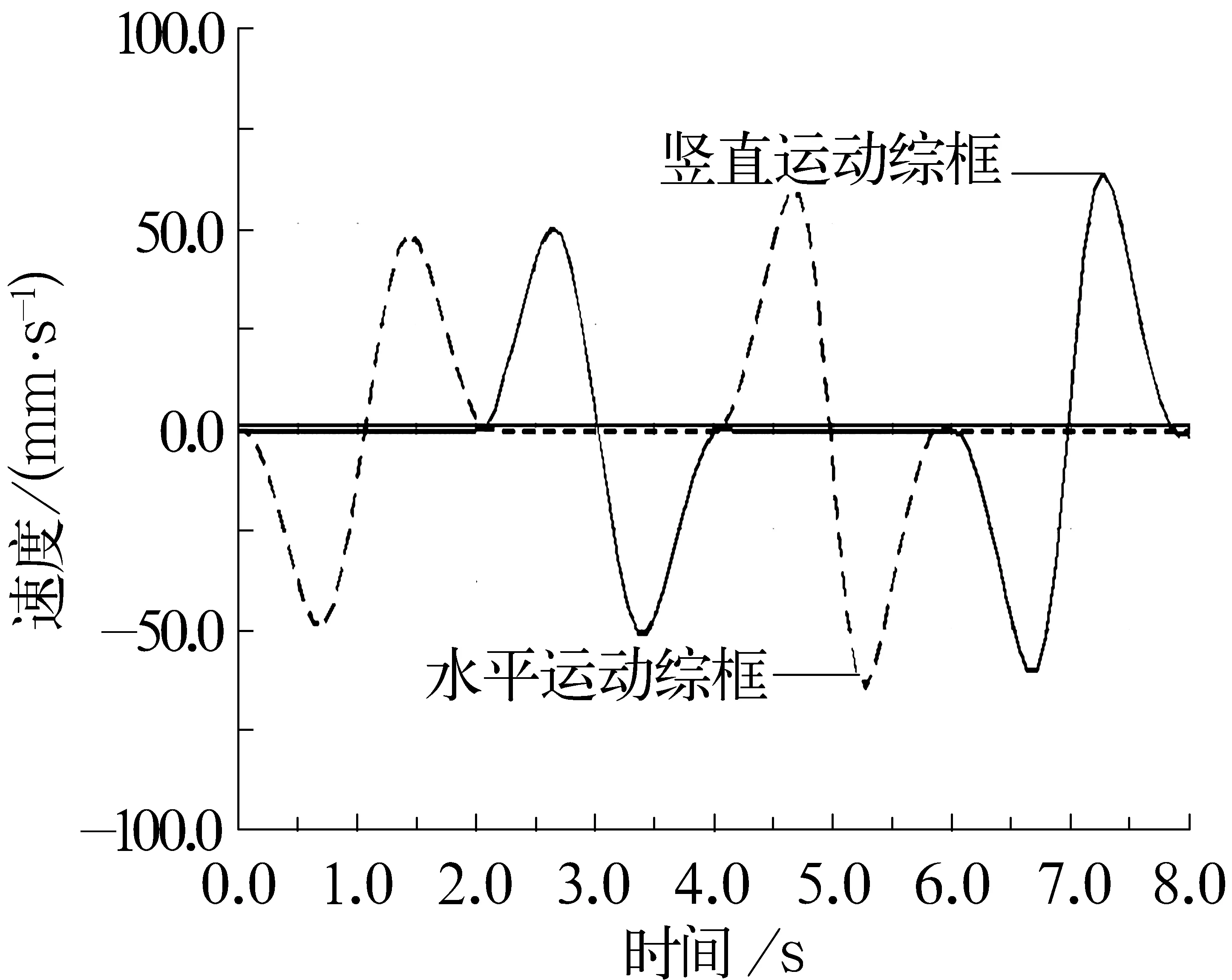
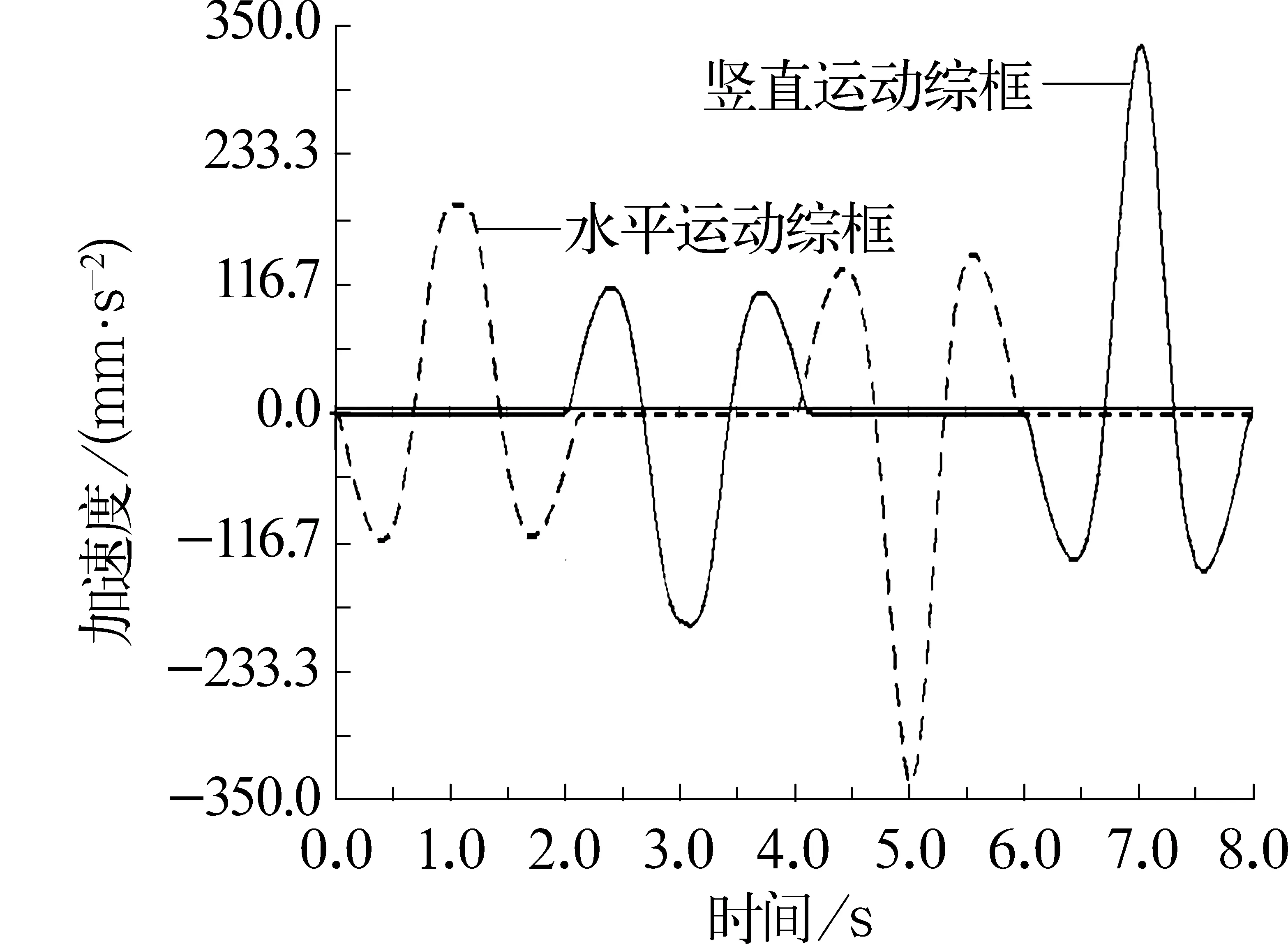
圖7、圖8為兩個方向綜框的綜合運動規律曲線。從圖中可以看出:在綜框開始運動時,速度、加速度迅速增大,這有利于多層經紗迅速分離、形成梭口;當開口形成后綜框的速度為零,這有利于多劍桿同時引緯;在開口終了和開始閉口時,加速度變化比較平緩,這有利于減小綜框的振動[5]。
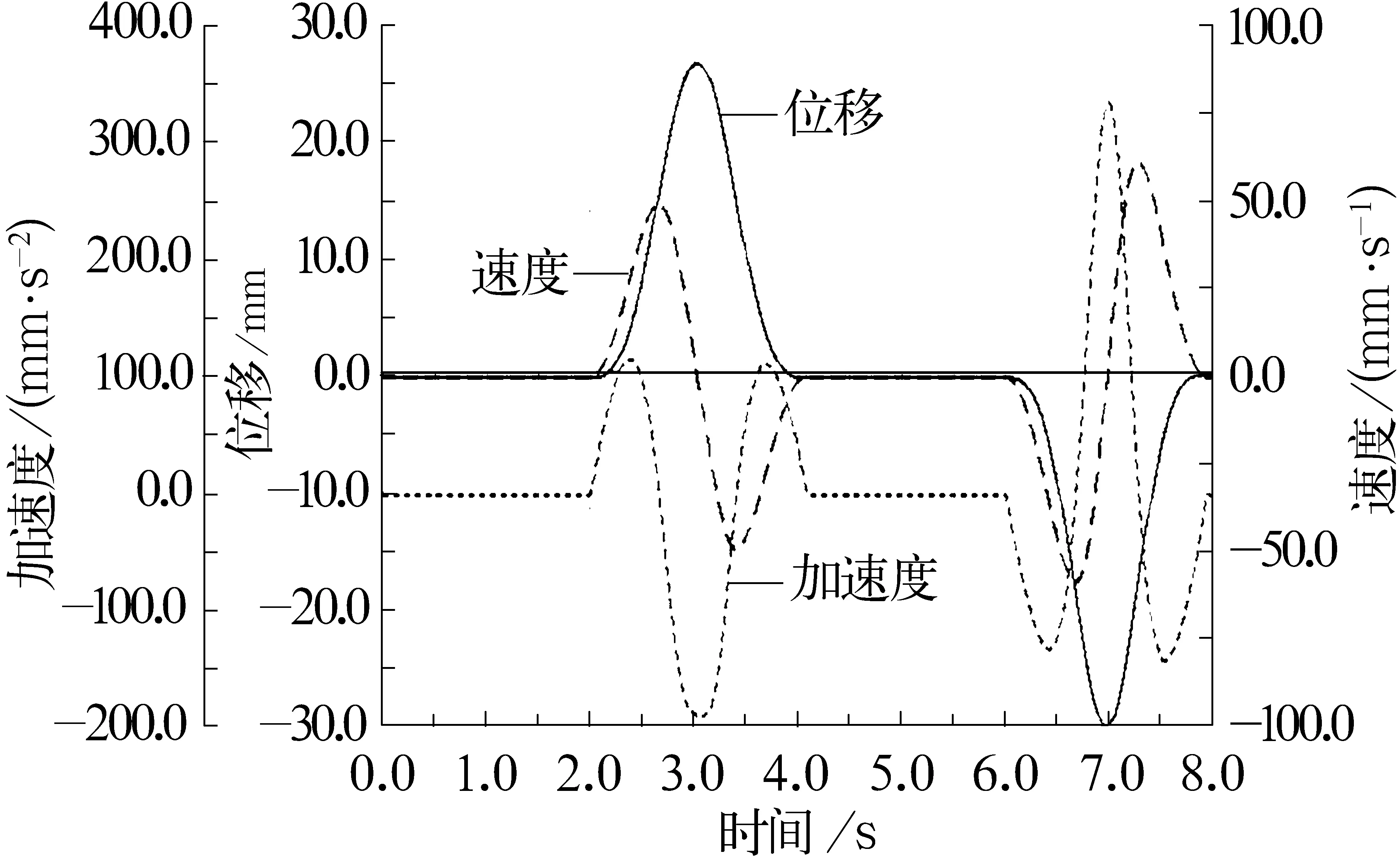
圖7 豎直運動綜框的運動規律曲線
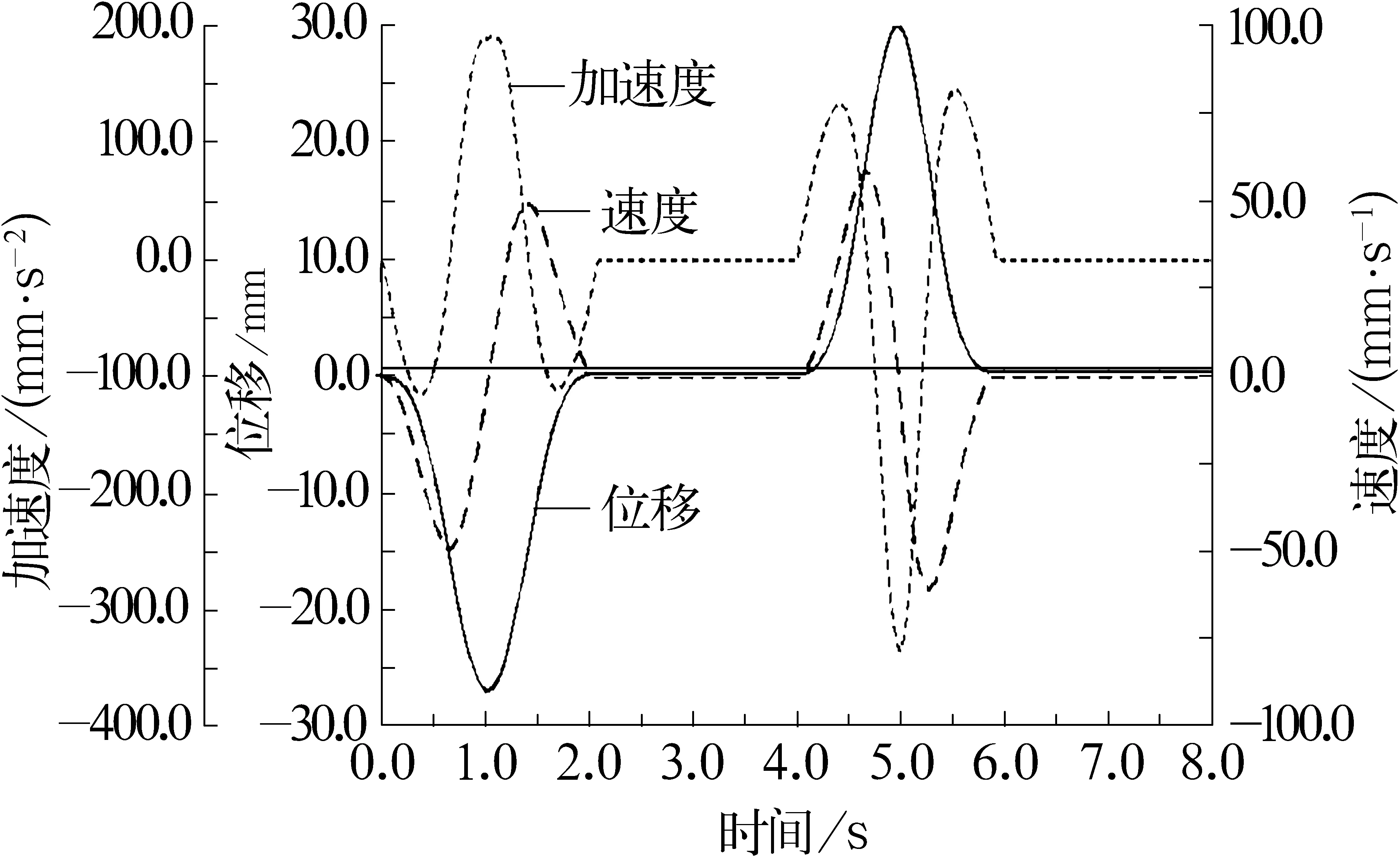
圖8 水平運動綜框的運動規律曲線
5 結語
三維織機采用雙向開口機構提高了可織造織物組織的復雜程度,可以更好地滿足一些尖端科技領域的需求。本文設計了雙向開口機構,在Pro/E中建立了雙向開口機構的虛擬樣機模型,通過數據轉換接口將模型導入ADAMS中進行仿真分析。仿真時,以織造雙向平紋織物為例,得到了綜框的運動規律,結果表明所設計的雙向開口機構能夠滿足織造要求。雙向開口機構能夠實現其運動有兩個關鍵因素:一是雙向綜框安裝在總動程的中心;二是控制每頁綜框運動的伺服電機運行函數的編寫。
根據織物組織結構的不同,可適當增減兩個方向的綜框頁數。織物組織結構越復雜,選用的綜框數越多,并且綜絲上的綜眼也越復雜。由于雙向開口機構設計的整體性,其可以應用于任何形式的三維織機,這對紡織預制件的生產具有很大優勢。雙向開口機構虛擬樣機模型的建立,為加快三維織機的發展奠定了基礎。
[1] 比蒂姆股份公司.網格狀織造的3D織物材料:中國,97181940.8[P].1997-03-03.
[2] NANDAN Khokar. Woven 3D fabric material: US, 6338367 B1[P].2002-06-15.
[3] 王美紅.三維機織預型件的織造技術[J].產業用紡織品,2013,31(4):1-9.
[4] 楊彩云,李嘉祿.復合材料用 3D角聯鎖結構預制件的結構設計及新型織造技術[J].東華大學學報:自然科學版,2005,31(5):53-58.
[5] 邱海飛,王益軒,劉欣.綜框模態頻率優化設計[J].機械設計,2012,29(5):35-38.
Research on the virtual prototype of the bidirectional shedding mechanism of three-dimensional loom
ZhaoMei,WangYixuan,LuChao,HanBinbin,ChenRongrong
(School of Mechanical and Electrical Engineering, Xi’an Polytechnic University)
The principle model of bidirectional shedding mechanism for weaving a fully intertwined three-dimensional textile perform was constructed,related working principle was introduced and simulation in ADAMS had been completed for study the motion characteristics of the bidirectional shedding mechanism. During the simulation in ADAMS, bidirectional plain woven perform was woven as an example,weaving requirements could be met by controlling the motion of servo motor reasonably and good motion characteristics was obtained, which provided a reference for the weaving of three-dimensional perform.
three-dimensional loom, the bidirectional shedding mechanism, virtual prototype model, ADAMS
* 陜西省教育廳產業化培育項目(2013JC17)
2014-08-13
趙梅,女,1987年生,在讀碩士研究生。研究方向為CAD/CAE/CAM及虛擬樣機技術。
TS103.8
A
1004-7093(2015)12-0027-05