基于科學實驗室系統的受迫振動特性研究
2015-07-02 12:39:22曲連曄何雨華郭先紅
物理與工程 2015年4期
邢 起 曲連曄 倪 晨 方 愷 何雨華 郭先紅
(同濟大學物理科學與工程學院,上海 200092)
受迫振動是一種在自然界普遍存在的物理現象,用波爾共振儀研究受迫振動特性是研究受迫振動的典型例子之一,有助于增強對振動的理解.傳統的實驗方法通過測量波爾共振儀的振幅和周期得到阻尼系數、幅頻特性和相頻特性曲線,無法實現對擺輪實時運動狀態的描述,不利于直觀全面掌握運動的物理規律[1,2].本文在傳統實驗方法的基礎上,利用轉動傳感器和PASCO平臺對擺輪的運動特性進行了全面分析,不僅得出阻尼系數β的值以及幅頻和相頻特性曲線,而且通過實時測量直觀地展示了擺輪的運動狀態,提高了實驗精度.實驗采用Science Workshop 750Interface接收數據、轉動傳感器CI-6538和多功能的數據處理軟件Datastudio,實現了對波爾共振實驗的自由振動、阻尼振動及受迫振動的分析.
1 PASCO系統簡介
PASCO系統由美國PASCO公司開發研制,利用傳感技術將非電學量轉換為電學量,通過計算機實現高效、準確采集,并將實驗的數據圖表實時地顯示,準確形象地展示各物理量的變化規律.在物理實驗方面,設備涵蓋了力、熱、光、電、機械波及原子物理等上百個實驗.其通用的數據采集系統 “科學工作室”(Science Workshop),是一種應用于科學實驗的數據收集系統.“科學工作室”主要由3部分組成:計算機接口、傳感器和軟件.PASCO系統是采用傳感器和數據采集器接口,通過Datastudio操作平臺進行控制和數據采集的物理實驗系統.用PASCO的Since Workshop系統設計實驗,實驗系統如圖1所示[3-5].
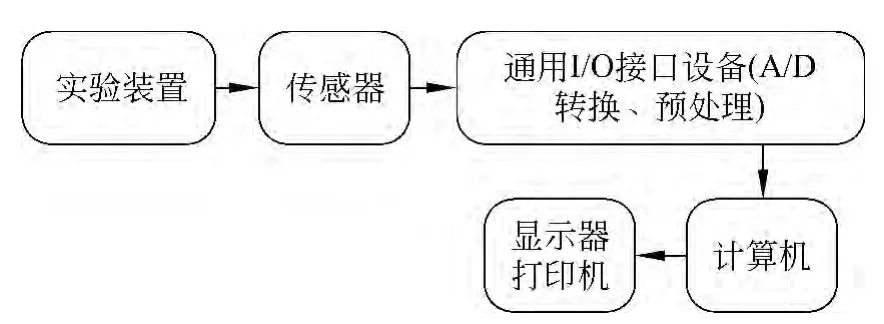
圖1 PASCO實驗系統原理框圖
2 實驗原理
在受迫振動狀態下,系統除了受到策動力的作用外,同時還受到回復力和阻尼力的作用.所以在達到受迫振動的穩定狀態時,物體的位移、速度變化與策動力變化不是同相位的,而是存在一個相位差.在無阻尼的條件下當策動力頻率與系統的固有頻率相同時產生共振,振幅最大,相位差為90°.
波爾共振儀實驗采用擺輪在電磁阻尼力矩作用下作阻尼振動,在外加驅動力作用下做受迫振動的方法,來研究受迫振動特性,可直觀地顯示機械振動中的一些物理現象.當擺輪受到周期性策動力矩M=M0cosωt的作用,并在有空氣阻尼和電磁阻尼的媒質中運動時(阻尼力矩為-β·(dθ/dt)),其運動方程為

式中,J為擺輪的轉動慣量,-kθ為彈性力矩,Μ0為強迫力矩的幅值,ω為強迫力的圓頻率,β為阻尼系數.
式(1)的通解為

由式(2)可見,受迫振動可分成兩部分:
第一部分,θ1e-βtcos(ωft+α)與初始位置有關,經過一定時間后衰減消失.
第二部分,說明強迫力矩對擺輪做功,向振動體傳送能量,最后達到一個穩定的振動狀態.

它與強迫力矩之間的相位差為

由式(3)和式(4)可看出,振幅θ2與相位差φ的數值取決于強迫力矩M、頻率ω、系統的固有頻率ω0和阻尼系數β,而與振動初始狀態無關.
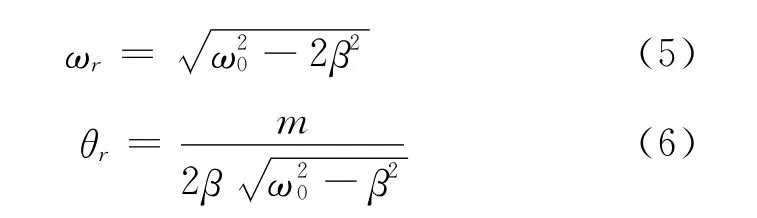
式(5)和式(6)表明,阻尼系數β越小,共振時圓頻率越接近固有頻率,振幅θr也越大,圖2和圖3表示在不同β時受迫振動的幅頻特性和相頻特性[6].

圖2 幅頻特性
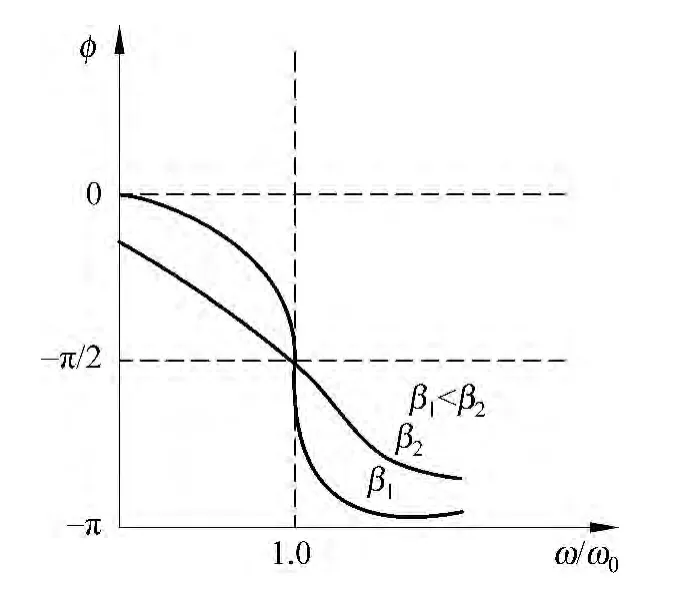
圖3 相頻特性
3 實驗裝置
傳統實驗一般采用光電門測定波爾共振儀的振幅和周期,為了獲得提供策動力的電機及擺輪的實時運動狀態,我們利用兩個轉動傳感器分別測量其角位移隨時間的變化過程,并通過Datastudio軟件進行數據擬合得到其振幅和周期.
為確保擺輪與轉動傳感器運動同步,我們分別采用滑輪及輕觸連接的方法將兩個轉動傳感器與擺輪及電機轉盤相連接.實驗裝置如圖4所示.細線一端固定連接到擺輪上,另一端連一個5g的砝碼自然下垂,中間纏繞在轉動傳感器的滑輪上,以此測量擺輪的運動狀態.電機運動狀態的測量,通過與另一轉動傳感器的滑輪直接輕觸連接實現.
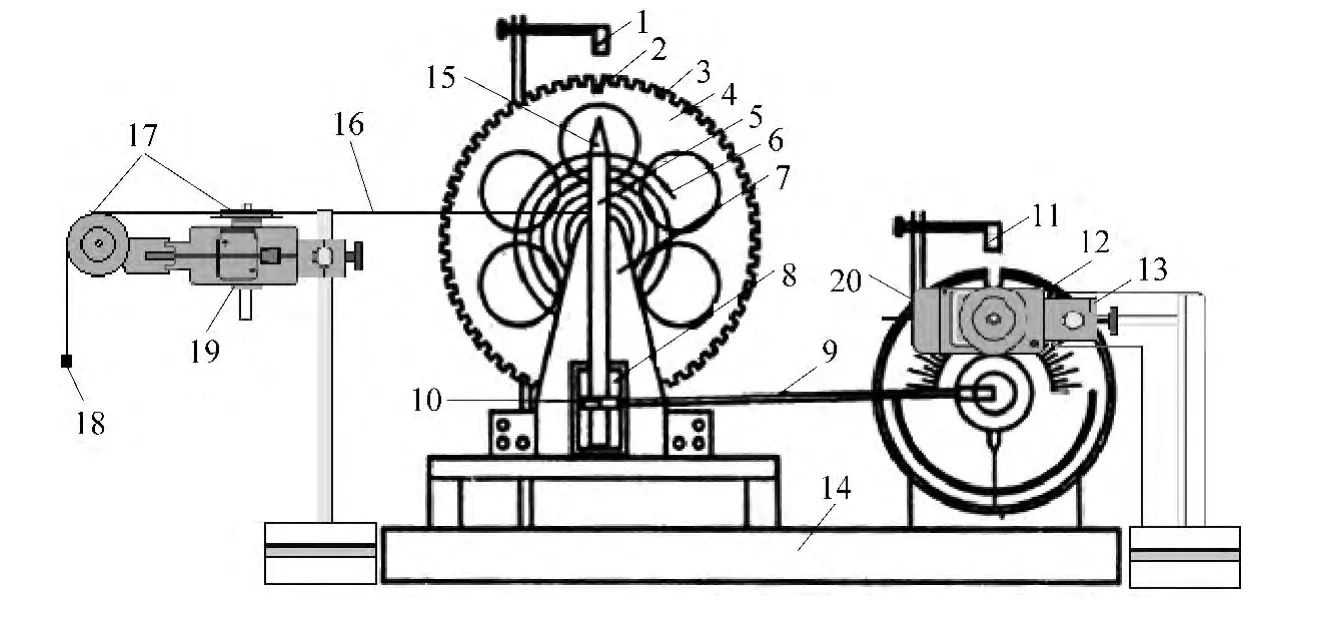
圖4 實驗裝置圖
實驗裝置水平放置,轉動傳感器1測量擺輪的運動狀態,轉動傳感器2測量電機運動狀態,將兩傳感器連接到Science Workshop750接口上,并將其連接到計算機.
4 實驗過程與數據分析處理
4.1 阻尼系數β的測定
設置擺輪初始轉過的角度為150°,采用PASCO系統,在Datastudio軟件中記錄下振動角度的實時數據點.橫軸為時間,縱軸為擺輪轉過的角度.顯然,擺輪在做周期性衰減振動.
我們將數據點導入到Origin軟件中,作出圖像,并對圖像進行曲線擬合,
圖5(a)為關閉電磁阻尼開關,自由釋放擺輪情況下的振幅隨時間變化曲線,圖5(b)、圖5(c)和圖5(d)分別為儀器所設定的電磁阻尼“1”、“2”、“3”擋下的振幅隨時間變化曲線.
圖5(a)情況下小阻尼振動方程為

由振動解析式可知,自由振動條件下的阻尼系數為0.01162,周期為2π/3.9904=1.5746s.
由于空氣阻尼以及軸承摩擦等阻尼的存在,自由振動下系統振動也會有略微的衰減.在振動后期,函數圖像擬合偏離實驗值較大,實際振動的衰減相比擬合出的曲線更為強烈,周期也略大,可以看出彈簧的非線性效應以及軸承的摩擦存在對結果有一定的影響[7].
對于電磁阻尼1、2、3擋下,我們采用同樣的數據擬合方法,分別得到它們的振幅時間圖、曲線擬合圖像以及擬合函數.經擬合得各阻尼擋下阻尼系數β如表1所示.
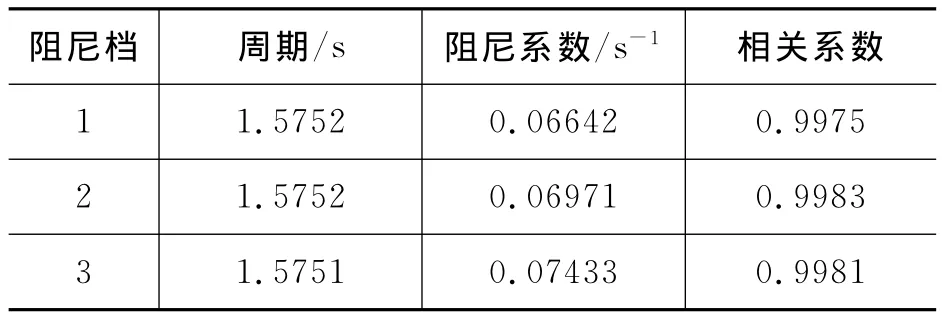
表1 各電磁阻尼擋下的阻尼系數β值
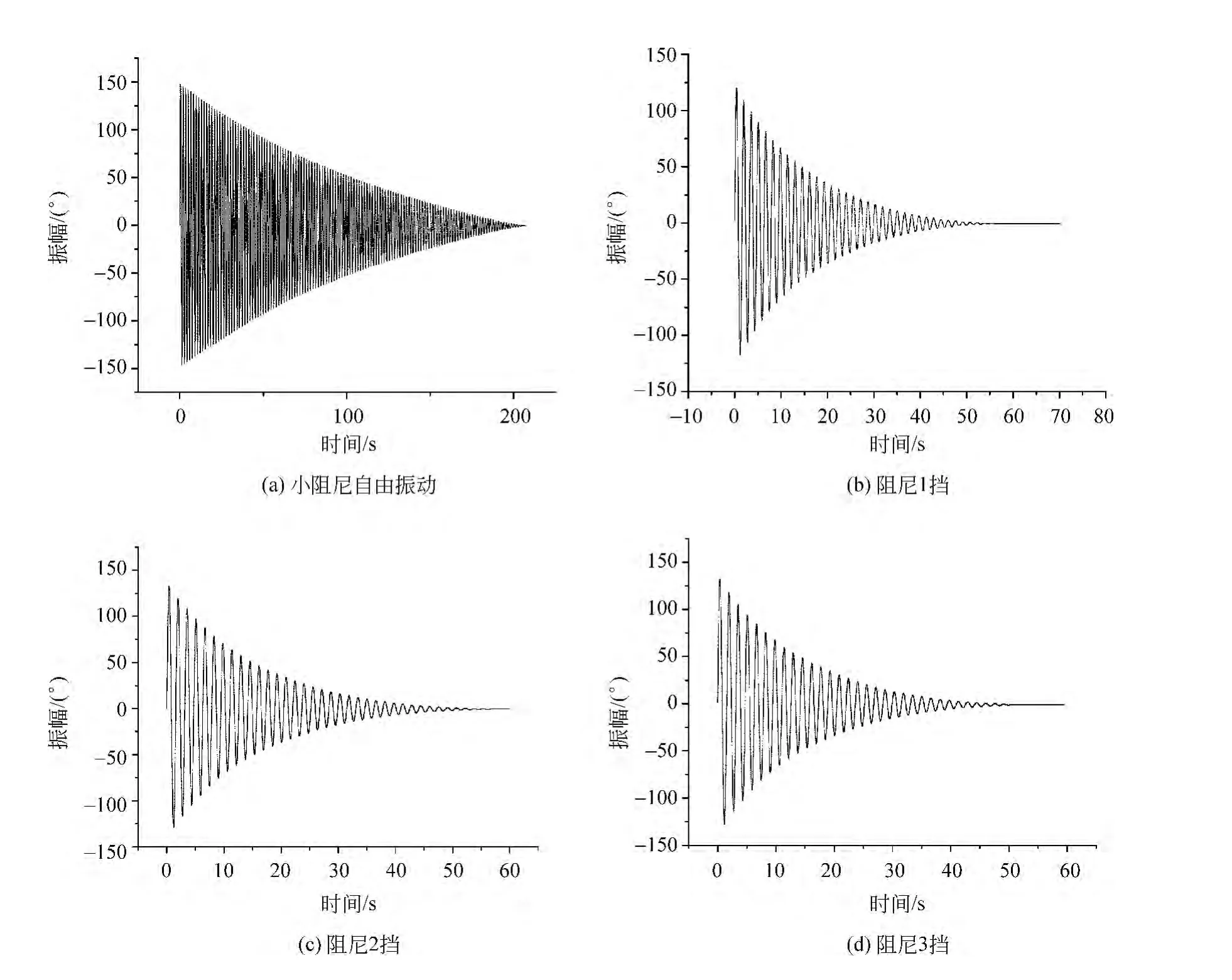
圖5 阻尼振動條件下擺輪的振幅隨時間變化曲線
相比于關閉電磁阻尼開關小阻尼時,阻尼增大后,阻尼系數明顯增大,周期也有小幅度增加.
4.2 擺輪的幅頻特性與相頻特性
1)幅頻特性
在實時測量法中,對于系統穩定時的振幅,可以從實時測量記錄的數據點中得到.在Datastudio軟件中,我們選取最終系統穩定時的足夠數據點,并對這些點進行正弦曲線擬合,得到正弦函數,從函數表達式中可以直接讀出系統穩定振動時的振幅和周期,如圖6情況下擺輪的最終振幅為60.9°,周期T為1.52s.
利用上面的方法,改變電機轉速,分別測量擺輪振幅和周期的變化.在阻尼1擋下,擺輪振幅隨電機轉速變化的數據,利用Origin繪制幅頻特性曲線,如圖7所示.
2)相頻特性
在以上的測量過程中,若分別以策動力振幅和擺輪振幅為坐標系的橫縱軸作圖,形成穩定的李薩如圖(見圖8),則可計算擺輪與電機的相位差.
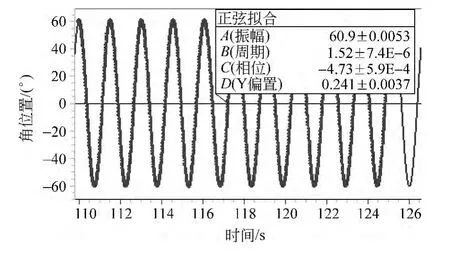
圖6 擺輪振幅實時測量圖表
阻尼1檔下,電機驅動周期為1.5251s時得到的李薩如圖,此時二者的相位差162.5°.用同樣的方法,可測得電機不同驅動頻率下的相位差.利用Origin繪制幅頻特性曲線,如圖9所示.
綜上所述,利用PASCO系統對擺輪與電機的振動角位移進行實時測量,可得到擺輪位移共振下的幅頻特性曲線與相頻特性曲線,實驗結果與符合位移共振理論模型.
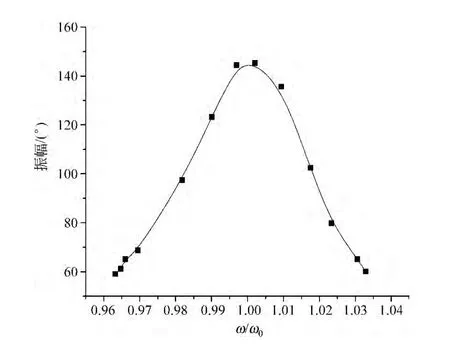
圖7 幅頻特性曲線
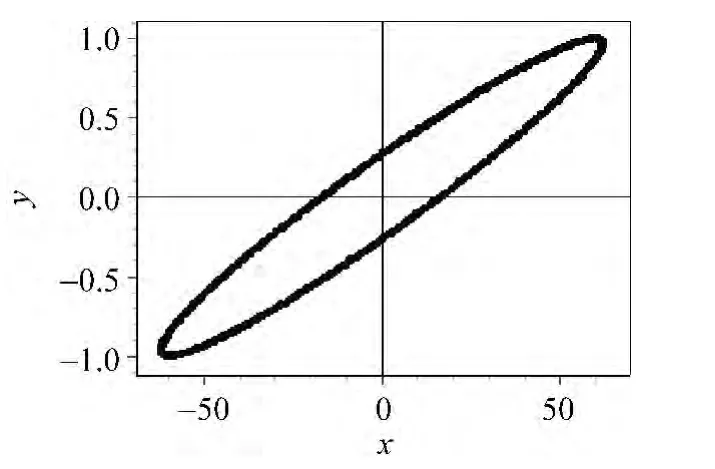
圖8 擺輪和電機振動形成的李薩如圖
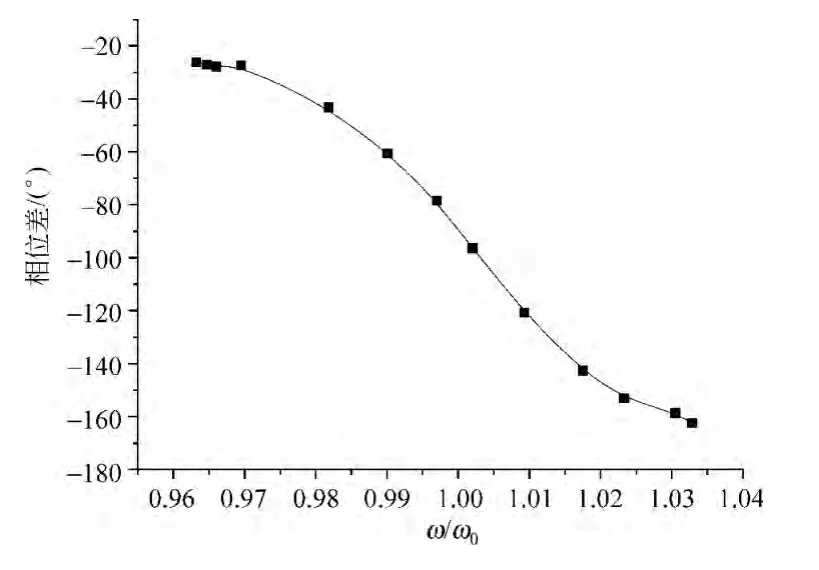
圖9 相頻特性曲線
4.3 觀察分析受迫振動的耦合圖像
在受迫振動中,我們利用PASCO系統實時測量,記錄下整個振動過程.在實驗中,我們將擺輪從開始被電機帶動振動,經歷耦合,到最終與電機一起穩定振動的圖像,通過Datastudio軟件記錄下來,整個振動過程如下:
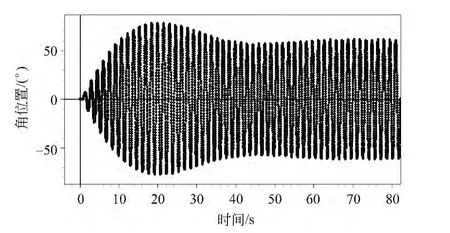
圖10 擺輪振動的全過程圖
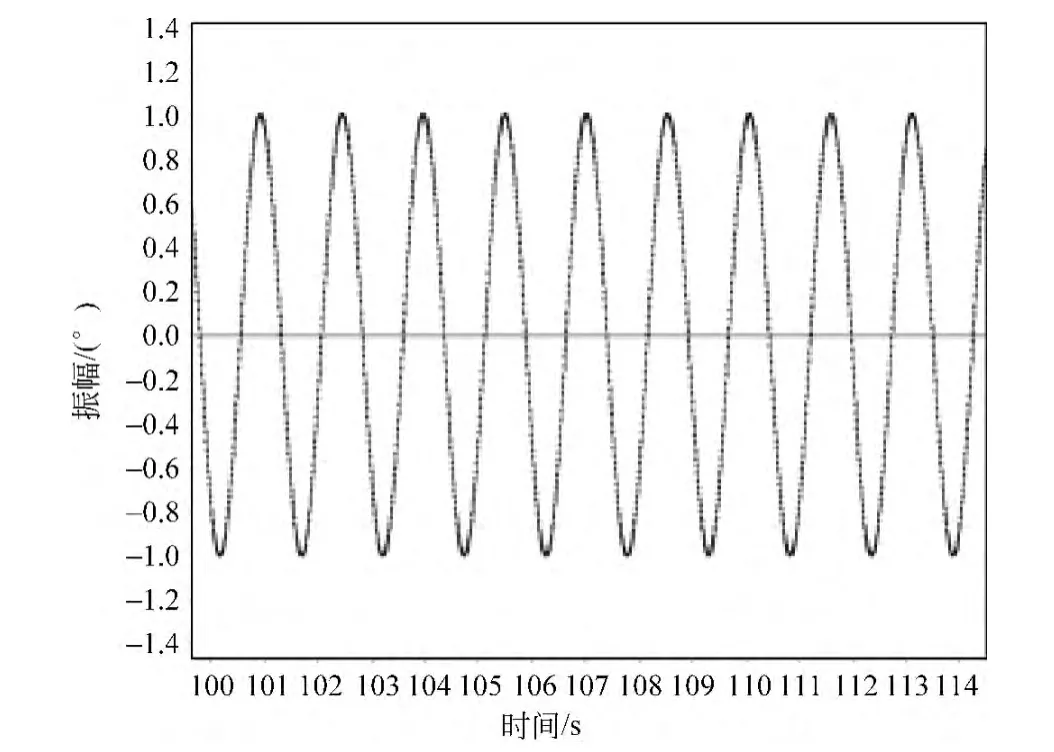
圖11 電機穩定振動
觀察圖形發現,在達到共振前,擺輪的振動出現了類似耦合擺中“拍”的現象(圖10),擺輪的運動是自身振動和電機帶動(圖11)兩個諧振動合成的“拍”,振幅時大時小有節奏地變化.達到穩定振動的標志就是振幅最大且不再隨時間變化(圖12),此時擺輪周期與電機周期相同.在式(2)中提到,受迫振動可分成兩部分:第一部分,θ1e-βtcos(ωft+α)與初始位置有關,經過一定時間后衰減消失.擺輪振動過程中,前期不穩定的“拍”的現象也就是公式中第一項衰減的過程,最后達到的穩定狀態,也就是第二部分,強迫力矩對擺輪做功,向振動體傳送能量,最后達到的穩定振動狀態.
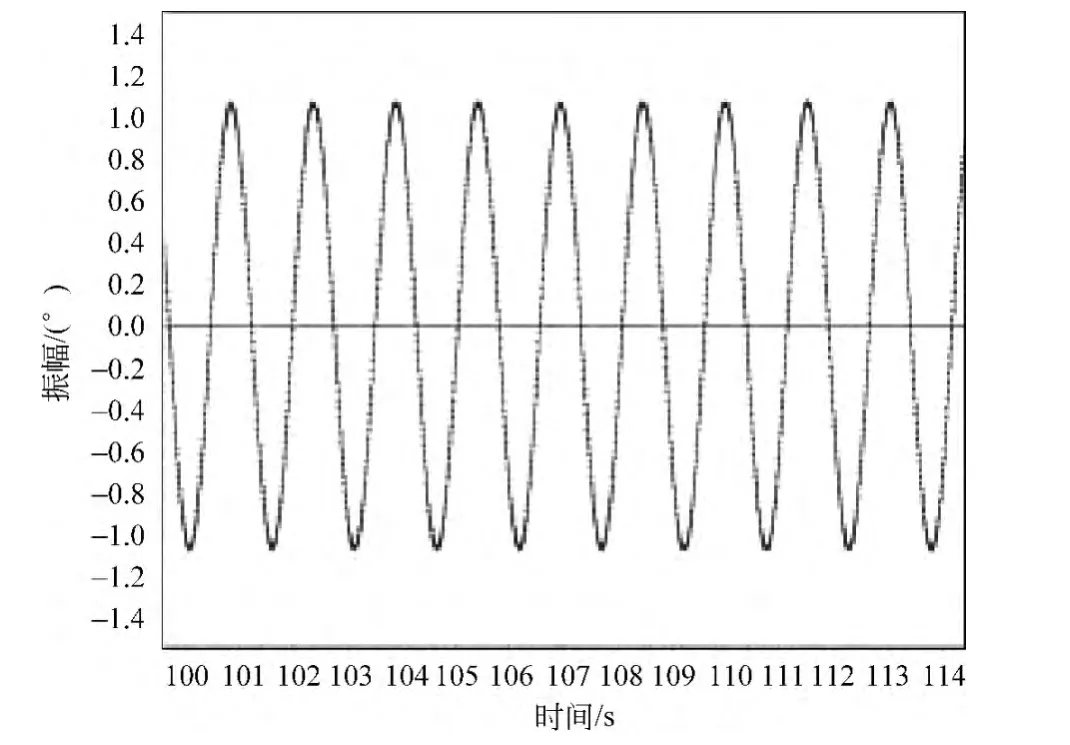
圖12 擺輪穩定振動
4.4 誤差分析
在對實驗儀器的改裝中,增加了傳感器以及測量擺輪的傳感器的連接中采用了細線懸掛重物帶動滑輪轉動的方式,因此會導致擺輪的轉動慣量J增加,由ω20=k/J可知,其ω0偏大,因此在整個實驗中我們得到的周期值T偏小.若采用無觸點的角度傳感器,則可減小因此而產生的系統誤差[8].另外,通常理論分析認為彈簧的彈性系數k為常數,實際當擺輪的振幅較大時,彈簧超出彈性限度,對實驗結果造成影響.此外儀器的系統誤差也會造成一定的影響,尤其是在傳感器的連接時,策動力電機的轉動半徑與傳感器的不同,測量直徑時無法避免產生系統誤差,導致半徑比不準確.因此會導致相位差不能長時間保持穩定.
5 結語
基于PASCO實驗測量平臺,不僅可實時觀測擺輪在自由振動、弱阻尼振動及受迫振動狀態下的運動圖像,使實驗過程更直觀且易于理解.還可通過Datastudio軟件或Origin等數據處理軟件,對數據進行計算分析,使實驗結果更為準確.通過觀測受迫振動中擺輪的完整運動過程,有助于理解受迫振動的物理現象的本質,拓展原有的大學物理實驗教學內容和測量方法,深入掌握其物理規律.
[1]陸廷濟,胡德敬,陳銘南.物理實驗教程[M].上海:同濟大學出版社,2000:66-72.
[2]方愷,等.物理實驗學習冊[M].上海:同濟大學出版社,2011:49-56.
[3]兆雪.淺談PASCO設備的管理[J].延安職業技術學院學報,2010(10):66-67.
[4]陳竹.探索實驗室——美國PASCO整體解決方案[J].中國教育技術裝備,2005(4):53-56.
[5]林淑淇,等.基于PASCO系統的簡諧運動特性研究[J].物理通報,2014(2):83-86.
[6]朱華澤.用波爾共振儀研究受迫振動特性[J].大學物理實驗,2011(6):57-60.
[7]董霖,等.波爾共振實驗“異常現象”的研究[J].大學物理,2010(2):57-60.
[8]程敏熙,等.周期性外力驅動的混沌擺[J].物理實驗,2009(1):7-13.
猜你喜歡
科學大眾(2023年17期)2023-10-26 07:39:14
小獼猴智力畫刊(2022年9期)2022-11-04 02:31:42
天天愛科學(2020年6期)2020-09-10 07:22:44
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
小哥白尼(趣味科學)(2019年6期)2019-10-10 01:01:50
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學物理學報(2017年6期)2018-01-22 02:26:40
發明與創新(2016年38期)2016-08-22 03:02:52
太空探索(2016年5期)2016-07-12 15:17:55
