基于OV7962的車載全景攝像頭設計
2015-07-05 17:34:55張寶龍李丹郭艷艷郭海成
液晶與顯示 2015年4期
關鍵詞:設計
張寶龍,李丹,郭艷艷,郭海成
基于OV7962的車載全景攝像頭設計
張寶龍1*,李丹1,郭艷艷1,郭海成2
(1.天津科技大學電子信息與自動化學院,天津300222; 2.香港科技大學顯示技術研究中心,香港九龍)
為了實現車載攝像頭的超廣角成像,解決倒車影像系統不能全面照顧周圍視角的問題,設計了一款超廣角車載攝像頭。對該攝像頭所采用的圖像傳感器、超廣角成像技術、硬件電路設計及接口EMC防護的應用進行研究。根據當前車廠對攝像頭的要求選擇了基于美國Omnivision公司的CMOS圖像傳感器OV7962作為成像芯片。采用一種新的凝視型視場全景成像技術——魚眼透鏡成像,并通過匹配成像芯片的參數計算出鏡頭的焦距和分辨率。對攝像頭硬件電路的設計及接口電磁兼容性(EMC)防護進行測試和改進。實驗結果表明:攝像頭可實現210°超廣角成像,接口EMC防護已通過ISO-7637-2脈沖5b標準測試。滿足了對倒車影像系統全面顧及周圍視角的要求,另外該車載全景攝像頭還具有成本低、性能穩定、分辨率高、夜視效果好等優勢。
魚眼透鏡成像;超廣角;CMOS圖像傳感器;電磁兼容性
1 引言
隨著人們對行車安全意識的不斷提高,車載輔助視覺系統在汽車電子領域得到快速發展,它能為駕乘人員提供車廂外環境的實時監控,為安全行駛提供保障,成了交通安全必不可少的設備之一[1-2]。攝像頭是車載輔助系統的主要部分,而普通攝像頭由于視角小、分辨率低已不能滿足全景泊車、夜視輔助、倒車影像等車載輔助視覺系統對攝像頭的要求。為了避免行車過程中的視覺盲區,大視角成為當今車載攝像頭面臨的首要問題,為了獲得更廣的視角往往采用多鏡頭拼接或者采用旋轉云臺的方法來實現,但往往存在盲區和成本過高等缺點。其次,為了能夠采集到行車細節及路況,高分辨率、高清晰度也同樣需要考慮。因此設計了一款視角可達210°的超廣角攝像頭,可實現無盲區實時拍攝。攝像頭圖像分辨率為640×480,可滿足車載攝像頭對成像細節的要求。相比普通的車載廣角攝像頭視角大多在120°,視角好價格昂貴的也只能達到180°左右的市場狀況而言,本文在考慮硬件成本的前提下所設計的210°超廣角攝像頭在業內非常具有競爭力。
下文將在成像芯片的選擇、魚眼鏡頭參數的計算、硬件電路設計以及接口處電磁兼容性防護等方面做詳細的闡述。
2 成像芯片的選擇
目前,車用視訊裝置已變得日益流行,激烈的市場競爭使汽車制造商要求較高的成像質量的同時在不斷降低生產成本,成像芯片是硬件成本的主要部分,因此成像芯片的選型非常重要。考慮到汽車在白天和夜晚都需要行駛,所以攝像頭的夜間拍攝效果也是影響攝像頭性能指標的重要因素,因此要求感光芯片要有很好的微光效能,使其在極低照度環境中無需任何補光設備也可呈現出清晰生動的畫面。再者,為了保持車身整體的美觀性還要求攝像頭尺寸要盡量小,這就要求感光芯片的封裝盡可能小。
綜合以上特點,本設計采用Omnivision公司的CMOS圖像傳感器——OV7962作為成像芯片。OV7962沿襲了CMOS圖像傳感器較高的集成度和較低的整體用料成本,其效能可超越同性能的CCD圖像傳感器[3-4]。它還能提供杰出的微光效能(<0.01/lx),即使在最具挑戰性的照明條件下,也可獲得具有良好分辨率的彩色圖像。芯片采用aCSP封裝形式,與同類競爭的CMOS裝置相比體積可減小至50%,能夠很好地縮小印制電路板的尺寸。工作溫度范圍從-40~105℃,符合AEC-Q100第2級的要求。
3 成像鏡頭參數的計算
3.1魚眼鏡頭
魚眼鏡頭,是依據仿生學原理而設計的一種焦距很短但視角很大的超廣角鏡頭[5-6]。本設計選用的魚眼鏡頭采用非球面鏡片結構由1片玻璃和3片塑膠鏡片組成,如圖1左圖所示。這種結構減少了傳統球面鏡魚眼鏡頭需用的球面鏡面數量,在保證畸變量的同時還能保證較好的成像質量。

圖1 魚眼鏡頭結構及具體外形Fig.1 Fisheye lens structure and shape
在光學設計中鏡頭要把圖像信息成像到感光芯片上,所以鏡頭和感光芯片的匹配直接影響最終的成像質量。因此需要根據所選圖像傳感器的參數來確定鏡頭的設計規格。
3.2鏡頭焦距確定
普通鏡頭遵循“相似成像”的物像相似原則,只需鏡頭成像公式就可以精確計算出鏡頭焦距,然而魚眼鏡頭由于其超大的視角已超過了一般應用光學的討論范圍破壞了物空間和像空間的約定,因此傳統的高斯光學不在適用,這時需要通過壓縮變形的方法使其“非相似”成像,從光學角度上是通過對其引入一定量的桶形畸變實現的[5]。目前,業內公認的魚眼鏡頭數學模型有4類公式如下:
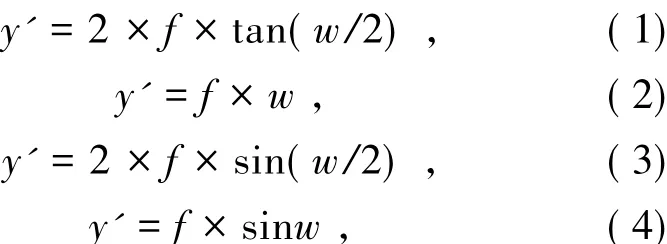
其中:y’為理想像高,f為物方焦距,w為物方半視場角。綜合考慮圖像細節的顯示和有用信息的壓縮程度并結合4類公式的特點,本文采用體視成像模型,如公式(1)所示。把像高代入成像公式得到f為0.77 mm。在此基礎上系統允許存在一定程度的負畸變,鏡頭畸變值最大允許在-20%左右,據此計算鏡頭焦距應該在0.97 mm左右。
3.3鏡頭分辨率
鏡頭的分辨率是指鏡頭所能分辨每毫米內包含黑白相間的線對個數的能力。同一鏡頭分辨率越高,其識別線對密度的能力越強,從圖2可以看出,線對密度較低時黑白線之間過渡帶很小不會影響圖像質量,而當線對密度達到一定程度后黑白線之間的過渡帶會逐步增大甚至分辨不清,所以為了提升圖像細節解析就要盡可能的提升鏡頭的分辨率。
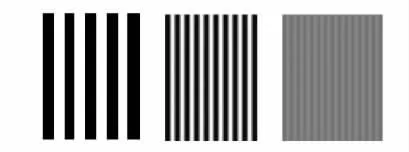
圖2 同一鏡頭拍攝不同的線對密度Fig.2Different line density was shot by same lens
然而鏡頭的分辨率是不能無限增大的,當達到一定程度后,成像元件對鏡頭分辨率的敏感程度會迅速下降,因此在鏡頭參數設計時需選擇鏡頭最大分辨率,其公式如下:

其中:fmax為最大分辨率,pixel為CMOS圖像傳感器的像素大小。感光芯片OV7962像素大小為6 μm×6 μm,根據公式(5)可得fmax為833 p/mm,然而一般鏡頭達到其最大分辨率的70%即可滿足成像條件,因此這里fmax取值為60 lp/mm。
根據上述計算得到了魚眼鏡頭的具體參數,如表1所示。從中可看出這款魚眼鏡頭還具有優越的視場范圍,較小的光圈系數以及較寬的工作溫度范圍,能很好的適應汽車環境,其物理形狀如圖1右圖所示。
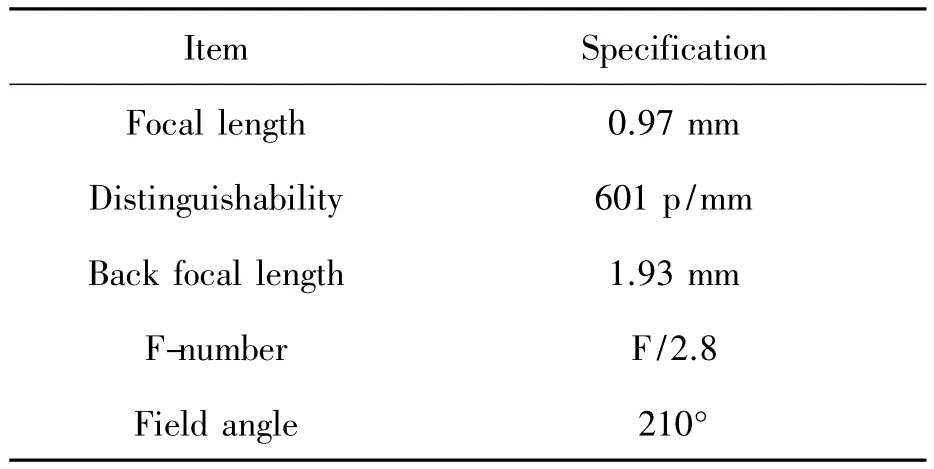
表1 魚眼鏡頭設計參數Tab.1Design parameters of fish-eye lens
4 攝像頭硬件電路設計
4.1硬件電路
攝像頭硬件電路主要包括視頻處理模塊、存儲模塊、電源模塊和調試模塊等部分,基本硬件框圖如圖3(a)所示。圖3(b)為OV7962外圍配置電路設計方案,OV7962輸出NTSC視頻制式時所需晶振頻率為24.545 454 MHz,原理圖頂部為上下拉電阻配置電路用于配置OV7962的工作模式,左側為一些參考電壓輸出,通過測試OV7962的四路參考電壓可得知圖像傳感器是否處在正常的工作狀態,此外,通過調節R24的阻值可改變輸出視頻信號的幅值,在畫面質量上表現為圖像曝光程度的不同。
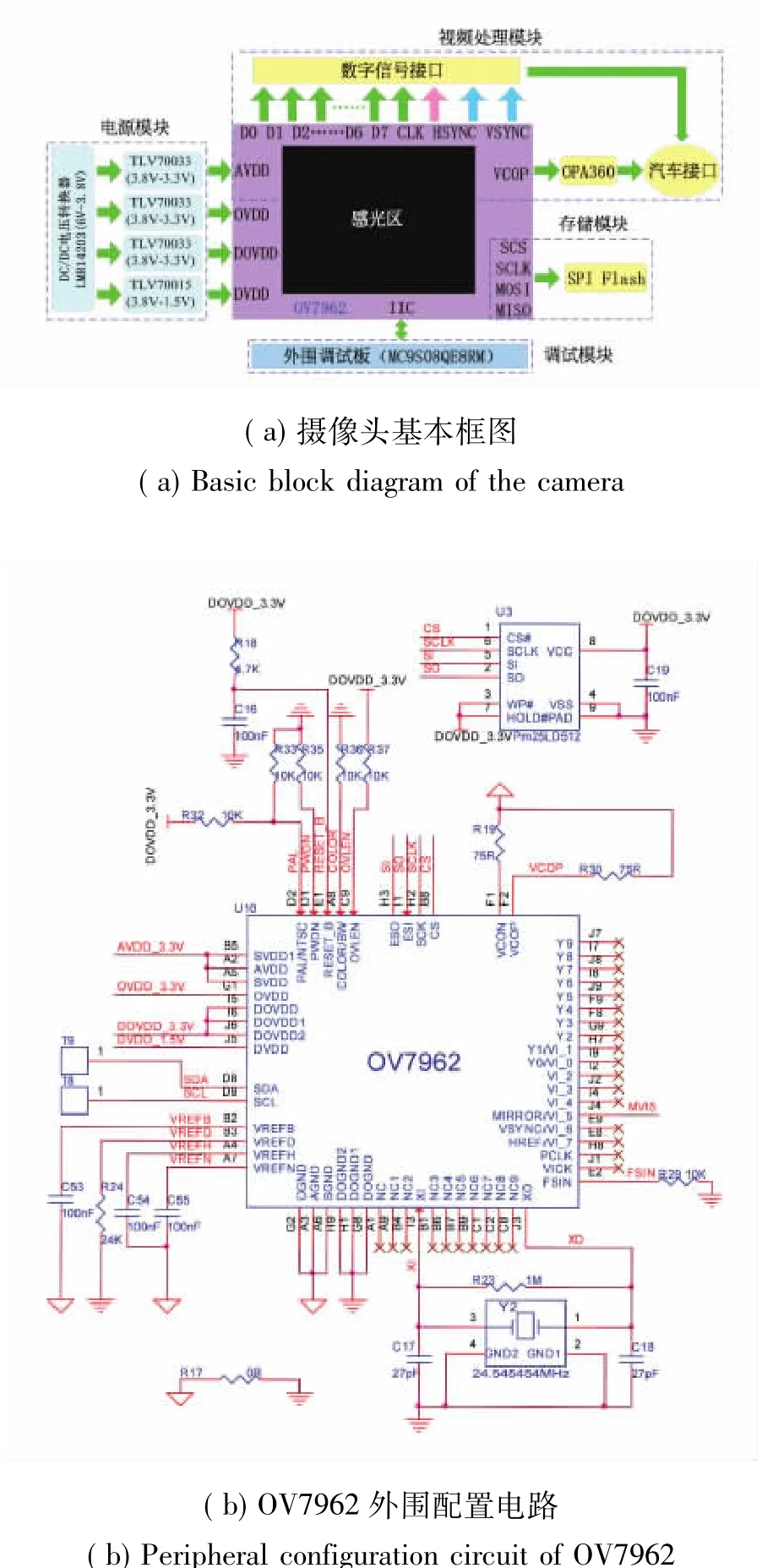
圖3 攝像頭基本框圖和OV7962配置電路Fig.3Basic block diagram and peripheral configuration circuit of OV7962
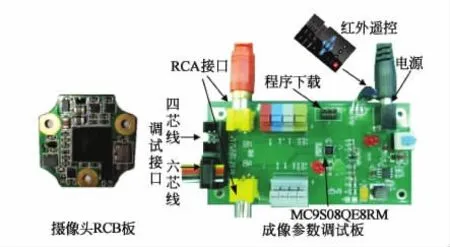
圖4 攝像頭硬件電路板和調試平臺Fig.4Hardware board and debugging platform of camera
攝像頭最終的硬件電路板如圖4左圖所示,調試模塊如圖4右圖所示。調試板接口與攝像頭接口相連,四芯線接口用于攝像頭穩定性測試;六芯線接口用于圖像傳感器內部寄存器的參數調節,中間兩根為IIC總線SDA和SCL。MC9S08QE8RM單片機通過IIC總線與OV7962通信,通過調節OV7962內部寄存器的值來改變圖像傳感器的成像效果以滿足不同應用環境下對圖像質量的要求。OV7962輸出的CVBS視頻信號通過RCA接口輸出到顯示設備。紅外遙控是調試板的人機交互部分,可實現復位、像素移動、彩條顯示、數據讀取以及程序擦除和燒寫等功能。由于OV7962內置了SPI接口,所以本設計選用SPI Flash——Pm25LD512作為OV7962的參數存儲器,將調試好的寄存器的值固化到Flash中,再由CMOS圖像傳感器提取。
4.2電源模塊
電源是一個系統能夠穩定運行的重要保證,特別是在對環境敏感的視頻處理電路中,低噪聲高純度的電源設計是硬件電路性能提升的關鍵部分。在12 V汽車電子系統中汽車發動機輸出端穩壓二極管的鉗位電壓設定在50 V,依據ISO-7637-2脈沖5b測試波形,可確定整個電源系統的最大輸入電壓約為37 V。為了提高電源的穩定性本設計采用兩級電源結構,一級電源轉換采用TI的DC/DC電源轉換器[7-8]——LMR14203,LMR14203具4.5~42 V的輸入電壓范圍,最大耐壓值為42 V滿足車載要求。如圖5(a)所示為LM14203原理圖設計方案,R23和R24兩個反饋電阻決定了輸出電壓,如公式(6)所示。

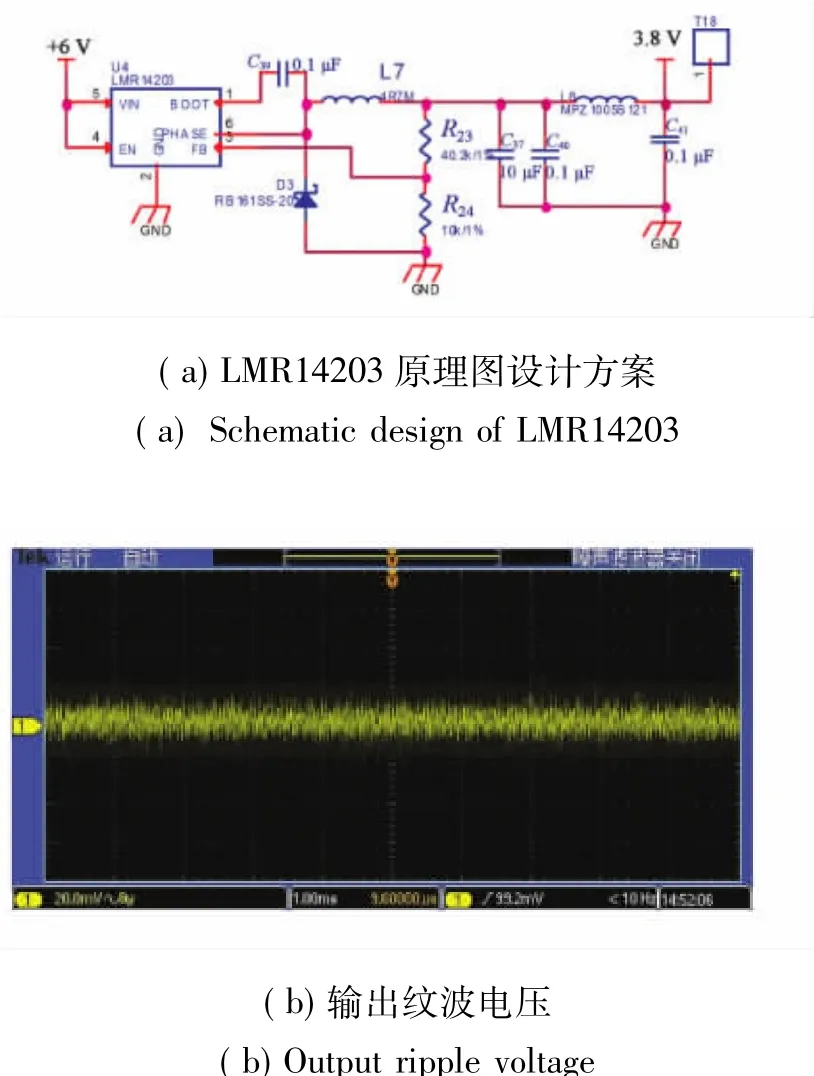
圖5 電壓轉換原理圖及輸出波形Fig.5Specific schematic and output waveform

其中:Fsw=1.25 MHz是LMR14203的開關頻率,Iripple為輸出的紋波電流,此紋波電流值應設置為輸出電流的30%。經計算最終選用TDK公司的貼片電感VLS252010ET-4R7,電感值為4.7 μH,額定電流為0.89 A,DCR為0.332 Ω。根據OV7962供電電壓要求,輸入電壓為三路3.3 V和一路1.5 V,為了避免干擾,二級電源選用3顆TLV70033和一顆TLV70015做成四路獨立電源為其供電。通過Tektronix示波器測得輸出電壓紋波在40 mV以內,如圖5(b)所示。
4.3電磁兼容性設計(EMC)
全景攝像頭的電源和信號接口直接與汽車電子主控系統相連,車內復雜的電磁環境會對攝像頭電路產生一定的影響,所以EMC防護是電路設計必須考慮的問題[9-11]。電磁兼容性設計主要考慮浪涌沖擊、靜電和EFT防護等。
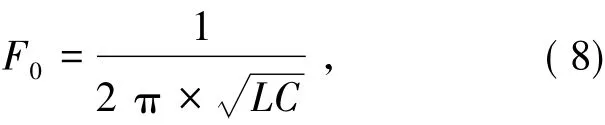
電源入口EMC防護,對車載攝像頭成品針對ISO-7637-2脈沖5b標準進行電源正極瞬變脈沖傳導發射測試,由于初期接口電路設計只是加入共模電感以及濾波電容進行處理,其初步測試結果如圖6(a)上圖所示,從中可看出電源端口的傳導干擾主要集中在30 MHz以上部分,不能滿足ISO-7637-2脈沖5b測試要求。針對此測試結果,對攝像頭電源入口電路進行如圖6(b)上圖所示的改進,將原有濾波電容替換為由C3、C4、L1組成的LC-π型濾波器來濾除電源信號中的交流諧波,平滑電源波形。在LC-π型濾波器參數設計時考慮到市面上電容值與電感值相比缺乏彈性,且對于體積的影響相對電感小,應優先考慮電容參數。單就噪聲抑制效果來講電容值越大越好,但由于電容受安規限制其值不能太大,所以選擇常用的10 μF。根據公式(8)可知,只要確定濾波器的截止頻率F0即可得出電感L的值。其中:FB=0.765 V,R23=40.2 kΩ,R24=10 kΩ,得出輸出電壓約為3.8 V。
輸出電感L的主要設計參數包括電感值、峰值電流和直流電阻(DCR),在滿足電流驅動能力的情況下盡量選擇直流電阻小的電感,電感值的計算公式如公式(7)所示:
眾所周知,實際的濾波器無法達到理想濾波器那樣陡峭的頻率衰減曲線,特別是當輻射干擾頻率很高時曲線衰減與理想值差別較大,通常將濾波器的截止頻率設為30~50 kHz可有效濾除高頻干擾。假設截止頻率為30 kHz根據公式(8)計算得電感L值大約為10 μH,考慮到體積問題本設計最終選用TDK的疊層片式鐵氧體電感——MLZ2012M100HT。改進后的攝像頭測試結果如圖6(a)下圖所示,滿足ISO-7637-2脈沖5b標準。
圖6 EMC測試報告及改進電路Fig.6Test report of EMC and improved circuit
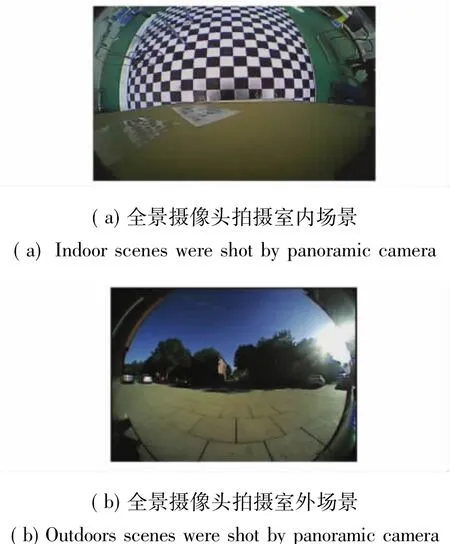
圖7 攝像頭拍攝的圖片Fig.7Pictures were shot by camera
另外對于視頻信號接口的EMC防護也是非常重要的,圖6(b)下圖展示了信號接口改進方案。VCOP是OV7962輸出的視頻信號,經過視頻放大器OPA360可有效的放大信號從而提高信號的抗干擾能力。W5為三端濾波器,可有效的濾除噪聲。在接口處之間加入TVS管R32,可抑制靜電、雷電和電快速適應脈沖群等浪涌沖擊產生的瞬間大電流保護電子器件免受損害。全景攝像頭最終拍攝的室內室外的場景如圖7所示。
5 結論
本設計的車載全景攝像頭實現了210°的超廣角成像,可在-40~105℃的環境下穩定工作,而且具有良好的防水防震性能,可靠性符合國際汽車零部件質量標準。攝像頭可應用在全景泊車、倒車影像等需要大視角的場合。從最終成像結果可看出在充分考慮降低硬件成本的前提下所設計的車載全景攝像頭性能優越、視角廣、穩定性高。
[1]于寶龍.基于可重構的汽車全景視覺輔助系統的研究與實現[D].北京:北京交通大學,2014.
Yu B L.Research and implementation of the reconfigurable car panoramic vision system[D].Beijing:Beijing Jiaotong University,2014.(in Chinese)
[2]冷坤,沈星,胡振程.基于環視系統的車道偏離預警系統研究[J].國外電子測量技術.2012,31(12):42-44.
Leng K,Shen X,Hu Z C.Research on lane departure warning system based on surround view assistance system[J].Foreign Electronic Measurement Technology,2012,31(12):42-44.(in Chinese)
[3]蘇宛新.一種高幀頻CMOS圖像傳感器系統設計[J].液晶與顯示,2013,28(6):956-962.
Su W X.Design of high frame frequency CMOS image sensor system[J].Chinese Journal of Liquid Crystals and Displays,2013,28(6):956-962.(in Chinese)
[4]張貴祥,金光,鄭亮亮,等.高速多通道CCD圖像數據處理與傳輸系統設計[J].液晶與顯示,2011,26(3):397-403.
Zhang G X,Jin G,Zheng L L,et al.Desigh of high-speed and multi-channel CCD image data processing and transmission system[J].Chinese Journal of Liquid Crystals and Displays,2011,26(3):397-403.(in Chinese)
[5]陳圣聰,林峰.超短焦全景魚眼鏡頭的研究與設計[J].光電工程,2012,39(2):49-52.
Chen S C,LIN F.Research and design of super short-focus panoramic fish-eye lens[J].Opto-Electronic Engineering,2012,39(2):49-52.(in Chinese)
[6]Hughes C,Denny P,Jones E.Accuracy of fish-eye lens models[J].Applied Optics,2010,49(17):3338-3347.
[7]Samavatian V,Radan A.A novel low-ripple interleaved buck-boost converter with high efficiency and low oscillation for fuel-cell applications.Electrical Power and Energy Systems,2014,63:446-454.
[8]Lee C F,Mok P K T.Monolithic current-mode CMOS DC-DC converter with on-chip current-sensing technique[J].IEEE Journal of Solid State Circuits,2004,39(1):3-14.
[9]涂楊.開關電源的EMC改善[D].廣州:華南理工大學,2012.
Tu Y.Research on improving EMC of the power supply[D].Guangzhou:South China University of Technology,2012.(in Chinese)
[10]余召鋒,于穎,徐鳴謙.國內外汽車電磁兼容研究發展狀況[J].客車技術與研究,2007,(2):8-10.
Yu Z F,Yu Y,Xu M Q.Over view on automot ive EMC research at home and abroad[J].Bus&Coach Technology and Research,2007,2:8-10.(in Chinese)
[11]Gagern C.EMC Testing of Automotive&MilitarySystem[M].Berlin:Presentation of ROHDE&SCHWA2 RZ,2002.
Panoramic camera design for automotive applications based on OV7962
ZHANG Bao-long1*,LI Dan1,GUO Yan-yan1,KWOK Hoi-sing2
(1.College of Information and Automation,Tianjin University of Science and Technology,Tianjin 300222,China; 2.Center for Display Research,Hong Kong University of Science and Technology,Hong Kong,China)
In order to realize ultra-wide-angle image for automotive camera,an ultra-wide-angle automotive camera is designed to solve comprehensive monitoring perspective issue in reversing image system.Its applied such as image sensor and ultra-wide-angle imaging technique,hardware circuit design and the EMC protection of interface are investigated.We opted for a Omnivision-based CMOS image sensors OV7962 according to the current auto companies’requirements.The lens adoptes the new staring panoramic imaging technology—fisheye lens imaging and calculating the focal length and resolution of the lens by matching the parameters of image chip.The hardware circuit design and EMC protection of the camera are tested and improved.Experimental results indicate that the camera can achieve 210°ultra-wide-angle image and the EMC protection of interface has passed the ISO-7637-2 pulse 5b testing standard.It can satisfy the comprehensive monitoring around per-spective requirements of reversing image system.In addition,this automotive panoramic camera also has the advantages of low cost,stable performance,high resolution,as well as super night vision.
fish-eye lens imaging;ultra-wide-angle;CMOS image sensors;electro magnetic compatibility
TP212.14
A
10.3788/YJYXS20153004.0634
張寶龍(1976-),男,天津人,教授,碩士生導師,主要從事光電顯示方向的研究。E-mail:eezbl@tust.edu.cn
1007-2780(2015)04-0634-07
2014-10-13;
2014-11-17.
天津市科技支撐計劃資助項目(No.13ZCZDGX03000)
*通信聯系人,E-mail:eezbl@tust.edu.cn
猜你喜歡
河北畫報(2020年8期)2020-10-27 02:54:06
現代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
電子制作(2019年19期)2019-11-23 08:41:36
電子制作(2019年15期)2019-08-27 01:11:50
電子制作(2019年7期)2019-04-25 13:18:16
藝術啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
商周刊(2017年26期)2017-04-25 08:13:04
