盾構柔性推進電液控制策略研究
2015-07-10 12:33:58張合沛李鳳遠王助鋒馮歡歡
建筑機械化 2015年9期
張合沛,李鳳遠,王助鋒,馮歡歡
(1.盾構及掘進技術國家重點實驗室,河南 鄭州 450001;2.中鐵隧道集團有限公司,河南 洛陽 471009)
盾構柔性推進電液控制策略研究
張合沛1,2,李鳳遠1,2,王助鋒1,2,馮歡歡1,2
(1.盾構及掘進技術國家重點實驗室,河南 鄭州 450001;2.中鐵隧道集團有限公司,河南 洛陽 471009)
結合現有壓力流量復合控制、分組聯合控制、負載敏感控制等技術,在盾構電液控制方式上提出改進型壓力流量復合控制策略,旨在解決推進油缸工作過程中易出現液壓管路受沖擊的問題,并通過理論實驗對該策略進行驗證,對盾構推進系統柔性控制提供一種思路。
盾構;液壓沖擊;控制策略;柔性;實驗
盾構推進系統承擔著推進任務并承載著從刀盤系統傳遞過來的外界載荷,當出現突變載荷較大或大偏載時,推進系統中液壓元件溢流、工作介質壓縮、液壓管道變形以適應外界突變載荷。
經過優化設計的盾構推進系統可以衰減掉部分外界載荷從而減小其對系統造成的損壞。因此,許多學者針對盾構施工過程中的突變載荷及柔性控制策略設計做了相關研究。
柔性是指機械裝備對外界環境變化適應能力的體現。盾構柔性推進電液控制主要目標是弱化外界載荷,改善作業環境,使其在載荷突變情況下仍能正常工作。本文設計了盾構柔性推進電液控制策略及盾構柔性推進電液控制流程,并通過盾構電液控制系統和自動化控制系統集成綜合實驗平臺進行模擬實驗及結果分析,為指導新一代盾構的設計研發提供了一種方法。
1 控制理論
盾構推進液壓系統具有變負載、功率大等特點,且推進油缸數量較多,要求系統對每個推進油缸即可單獨控制,也可分組控制,同時保證所有推進油缸的協調及同步控制。因此,在盾構推進液壓系統中常采用壓力流量復合控制和分組聯合控制的方式,即將推進油缸沿圓周方向劃分成若干區域(由于所處位置不同,每區的推進油缸數量不同)。
1.1 壓力流量復合控制技術
在施工過程中,推進系統需要實現對推進速度及推進壓力的雙重控制,單純的速度或壓力控制系統均無法滿足上述要求。
因此,在盾構推進液壓系統中,利用壓力流量復合控制的方式實現推進壓力與速度的單獨控制,大大弱化了二者之間的相互影響。依據所用液壓控制元件的不同,壓力、流量復合比例控制可分為節流控制和容積控制兩種方式。其中,節流控制方式具有系統響應性高、可微流量調節、操作方便、結構簡單等優點,但存在能耗較大、系統能效利用率較低等缺點,大多用于小功率液壓控制系統;容積控制方式具有節能、能效利用率高等優點,但也存在控制系統動態響應能力差等缺點,多用于大、中功率液壓控制場合。根據盾構作業環境及控制需求,主控油路選用容積控制方式,分控油路采用節流控制方式,即分別采用比例溢流閥與比例調速閥進行支路壓力與流量的單獨控制,如圖1所示。
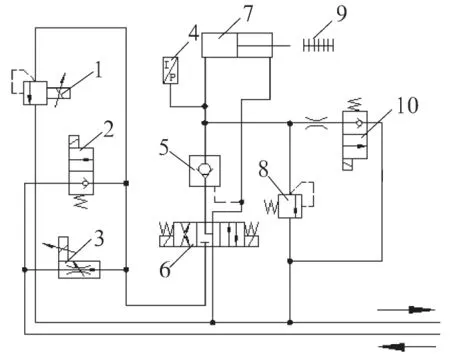
圖1 推進系統單個分組液壓原理圖
系統中均設有壓力傳感器和位移傳感器以實時監測推進油缸的推進壓力及位移,并與比例溢流閥和比例調速閥分別構成推進壓力及速度閉環控制,達到壓力和流量的復合控制,實時控制推進油缸的推進壓力及速度。
1.2 分組聯合控制技術
盾構在掘進過程中,刀盤或刀架的精確進刀與對刀是非常重要的,若被切削的掌子面的地質較復雜,由于地層阻力的影響,使刀盤在前進過程中容易發生偏離,這時就需要通過推進油缸的協同控制來實現盾構姿態的微調整,若對每個推進油缸單獨控制,控制成本及精度都會受到影響,因此,利用分組聯合控制方式,對每個子區的推進油缸分別控制,既可以節約成本、提高控制系統可靠性,又可以實現盾構掘進姿態、方向的精確控制。
由于盾構推進阻力不均勻的原因,所以每個區的推進油缸數量及分布密度有所不同,通常是下邊的分區推進油缸數量最多,密度最大,上邊的分區推進油缸數量最少,密度最小,兩邊的分區推進油缸數量居中。
2 控制策略
利用了壓力流量復合控制、分組聯合控制、PID控制、PLC控制等技術原理對盾構柔性推進控制進行研究,基于盾構電液控制系統綜合實驗平臺對盾構柔性推進電液控制策略進行設計。
利用以下控制原理來實現比例壓力流量復合控制:首先,對推進油缸的壓力、流量信號進行采集、處理、反饋,比例壓力閥作為壓力流量復合控制的主要執行元件,根據對稱取值及平均值原則對系統壓力、流量反饋信號進行算法處理,再進行壓力、流量實時調整,達到比例壓力流量復合控制;比例調速閥實現流量大致范圍的控制,提供推進油缸正常推進和比例壓力閥穩定溢流所必需的流量,如圖2所示。
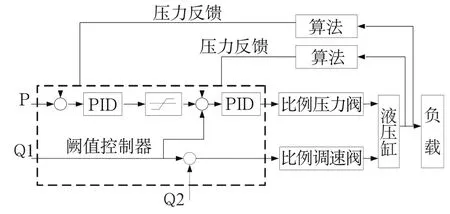
圖2 推進系統壓力流量復合閉環控制策略
3 控制流程
基于盾構自動化控制系統集成綜合實驗平臺,結合上述控制技術及控制方法,進行盾構柔性推進電液控制軟件流程設計,如圖3所示。
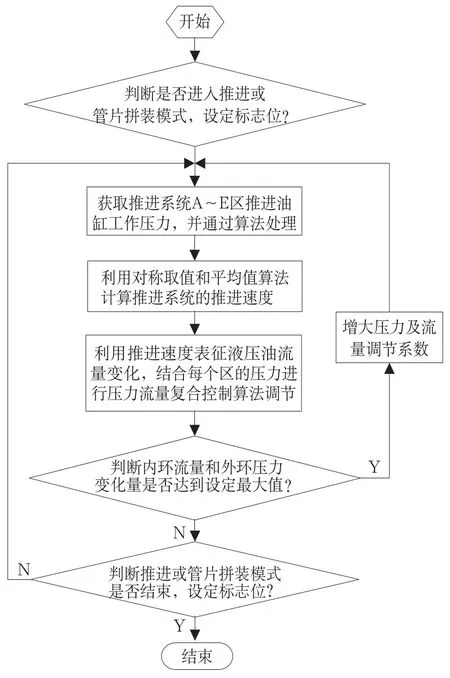
圖3 柔性推進控制流程圖
4 實驗研究
在對推進油缸控制的過程中采用壓力流量復合控制方式,結合電液比例控制技術,在控制軟件設計上采用PID算法,提高盾構推進系統控制精度,達到柔性控制的實驗目標。
在控制系統設計上對A、B、C、D、E五組推進油缸的供油端壓力和出油端壓力通過傳感器進行數據采集、處理,得到五組推進油缸在工作過程中的液壓油的實時壓力,利用PID算法,根據五個區推進油缸工作壓力的實時變化對電液比例閥進行動態調節,在推進速度計算上采用對稱取值及平均值原則,使推進速度能夠反映液壓油流量的線性變化,在柔性控制上利用推進速度變化表征液壓油流量變化,形成壓力流量復合控制方式,提高系統的動態響應能力,避免對液壓管路沖擊現象的發生。
根據上述要求進行仿真實驗,得到推進系統A~E組工作壓力曲線如圖4~圖8所示。
盾構瞬時推進速度是每個推進工作區的行程傳感器在兩次行程數據采集、處理時間間隔(Δt)的行程差與Δt的比值為Vt。每個推進工作區的推進速度是根據連續10個瞬時推進速度求得的平均值,即

其中N為A、B、C、D、E。
盾構推進系統的推進速度是根據A、C、E3個工作區的平均推進速度求得,即

通過實驗分析,結果如圖9所示。
從仿真結果可以得出如下結論:①在控制系統中引入雙PID控制,對推進系統在掘進過程中由于荷載突變引起的推進油缸壓力變化有明顯的抑制作用;②在推進速度計算上采用對稱取值及平均值原則,推進速度能夠較好反映液壓油流量的線性變化情況;③該控制策略能夠在非線性大負載工況下實現壓力流量的復合控制,提高系統的控制精度和動態響應能力。

圖4 推進系統A組工作壓力曲線圖

圖5 推進系統B組工作壓力曲線圖

圖6 推進系統C組工作壓力曲線圖

圖7 推進系統D組工作壓力曲線圖

圖8 推進系統E組工作壓力曲線圖

圖9 推進系統推進速度曲線圖
5 結論與建議
在盾構柔性推進電液控制系統設計過程中利用推進速度變化表征推進油缸流量變化方法,形成壓力流量復合控制方式,在推進速度計算上采用對稱取值及平均值原則,使推進速度能夠較好反映液壓油流量的線性變化,提高系統的動態響應能力,有效避免液壓管路沖擊現象。但,該控制策略僅在盾構電液控制系統及自動化控制系統集成綜合實驗平臺進行模擬實驗,未在盾構設備施工過程中應用檢驗,需要后期不斷深入研究,去指導盾構控制系統設計。
(編輯 張海霞)
Research of shield fl exible promoting electro-hydraulic control strategy
ZHANG He-pei, LI Feng-yuan, WANG Zhu-feng, FENG Huan-huan
國家高技術研究發展計劃(863計劃)資助(2012AA041802)
TU621
B
1001-1366(2015)09-0070-04
2015-07-16
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
能源工程(2020年6期)2021-01-26 00:55:22
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
山東冶金(2019年3期)2019-07-10 00:54:04
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
消費導刊(2018年10期)2018-08-20 02:57:02
家庭影院技術(2017年9期)2017-09-26 03:41:45
通信電源技術(2016年1期)2016-04-16 04:57:26
