電動車輛驅動控制系統仿真測試平臺設計
2015-07-11 10:09:38邱斌斌朱紹鵬馬浩軍方光明應振有寧曉斌
浙江大學學報(工學版) 2015年6期
邱斌斌,朱紹鵬,馬浩軍,方光明,應振有,寧曉斌
(1.浙江大學 動力機械及車輛工程研究所,浙江 杭州310027;2.眾泰控股集團有限公司,浙江 永康321300;3.浙江工業大學 車輛工程研究所,浙江 杭州310014)
電動車輛的驅動控制系統按結構形式可分為單動力源驅動和包含輪轂電機在內的多動力源獨立驅動;按功能則可分為基本驅動力控制、電子差速控制、驅動防滑控制等.因此,電驅動車輛控制系統具有結構多樣、功能復雜等特點.
當前,很多學者都對電驅動車輛的驅動控制系統開展了深入研究并進行了樣車試驗[1-4].但是,在控制策略設計及仿真驗證階段多采用基于MAT-LAB/Simulink建立的理想車輛模型.理想的車輛模型忽略了車輛多自由度、風阻及路面條件等因素,同時較少考慮電機類型的差異化特性,因此,其仿真測試結果往往較為理想,并不能有效地驗證復雜甚至極限工況下的車輛驅動控制效果.此外,由于電動汽車仍處于研發及小批量生產階段,尚未達到大規模量產定型階段,不同車型往往采用不同的驅動方式,匹配不同類型的電機及電池.若沒有一個適用于不同車型的車輛驅動力控制系統仿真測試平臺,就需不斷構建整車、電機等模型,反復匹配驅動控制系統,這將大大延長研發周期,增加測試成本.
為了充分利用軟件仿真測試速度快的優點,同時克服以往針對不同車型進行反復建模、匹配的缺點,本文設計了一個面向電動車輛、通用的驅動控制系統仿真測試平臺.基于MATLAB/Simulink 和CarSim 兩個軟件搭建的仿真測試平臺,采用模塊化設計思想,集成了CarSim 車輛動力學模塊庫、整車驅動控制模塊庫、電機模塊庫及“人-車-路”觀測模塊.另外,利用該仿真測試平臺,設計了前輪獨立電驅動車輛的驅動力分層控制系統,并對其進行了多種危險工況下的仿真測試.
1 驅動控制系統仿真測試平臺
1.1 設計方案
在仿真測試平臺設計的過程中必須綜合考慮系統約束,根據仿真需求確定的平臺體系結構如圖1所示.該仿真測試平臺由MATLAB/Simulink、Car-Sim 軟件及2個軟件的數據交換通道構成,集成了CarSim 車輛動力學模塊庫、整車驅動控制模塊庫、電機模塊庫及“人-車-路”觀測模塊.采用模塊化的結構使得當單一模塊需重新配置時,只需修改相應模塊內的參數,即可實現不同仿真環境的快速配置.設計的驅動控制系統仿真測試平臺具有可配置性、可重用性及通用性.
1.2 仿真測試平臺模塊庫
CarSim 軟件的車輛動力學模塊庫具有多種高精度、可配置的車輛模型,還提供了各種復雜的外部道路環境,其參數化的建模方式、豐富的整車模型及子系統模塊庫降低了動力學建模的復雜度,被廣泛運用于車輛的操縱穩定性、制動性及平順性等分析[5-7].
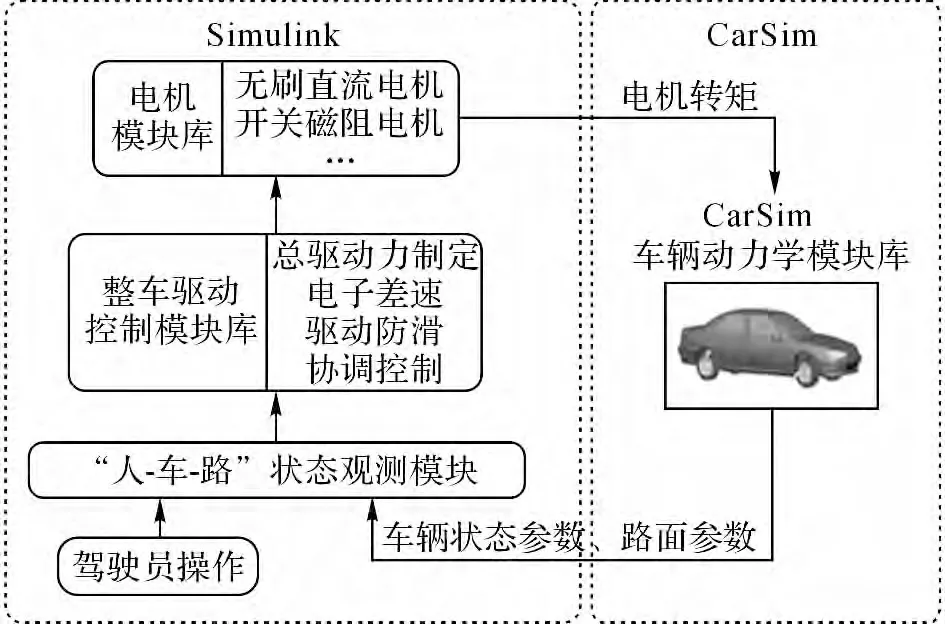
圖1 電動車輛驅動控制系統仿真測試平臺結構Fig.1 Structure of simulation and test platform for EV’s drive control system
利用MATLAB/Simulink 建立的整車驅動控制模塊庫目前包括總驅動力制定模塊、電子差速模塊、驅動防滑模塊、協調控制模塊.建立的電機模塊庫體現了電機模型的差異化,目前包括無刷直流電機模塊和開關磁阻電機模塊,其他電機模型的添加工作正在進行中.電機模塊主要由電機動態模型及驅動控制部分組成,其中電機動態模型是對電機運行特性的數學建模,驅動控制部分模擬了電機控制算法.“人-車-路”觀測模塊主要用來獲得和傳遞駕駛員操作、車輛狀態參數及路面參數等信息.
2 基于仿真測試平臺的驅動力分層控制系統設計
如圖2所示,利用建立的電動車輛驅動控制系統仿真測試平臺,針對前輪獨立驅動電動汽車,設計了驅動力分層控制系統,并進行多工況下的仿真測試.圖中,Fzi是各輪垂直載荷,ui為路面附著系數,Di為失效因子,ni為各輪轉速,i代表各輪,δsw為方向盤轉角輸入,v為反饋車速,γ 為車輛實際橫擺角速度,β為質心側偏角,Vfl、Vfr分別為左前輪和右前輪輪轂電機的目標電壓;Tfl_true、Tfr_true分別為左前輪和右前輪輪轂電機輸出的真實轉矩.
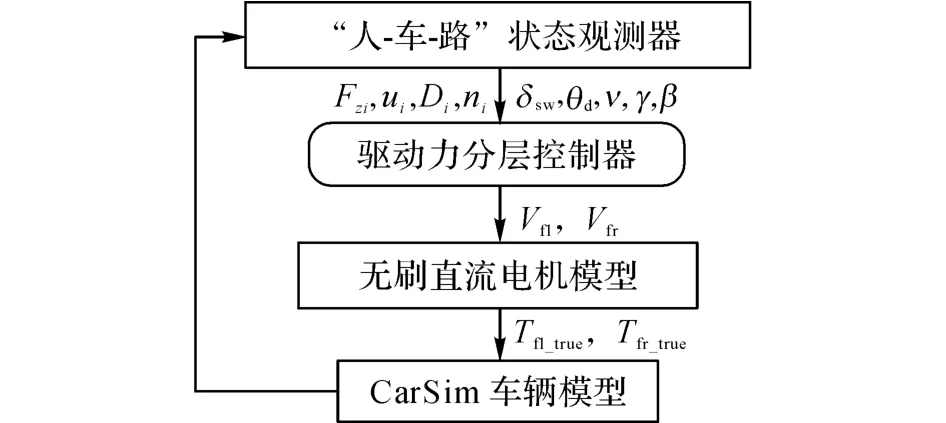
圖2 基于仿真測試平臺設計的驅動力分層控制系統框架圖Fig.2 Framework diagram of driving force hierarchical control system based on test platform
根據車輛參數(見表1)修改CarSim 車輛動力學模塊.同時,調用整車驅動控制模塊庫的總驅動力制定模塊、驅動防滑模塊及協調控制模塊,設計整車驅動力分層控制器.另外,選取無刷直流電機模塊作為前輪驅動電機.
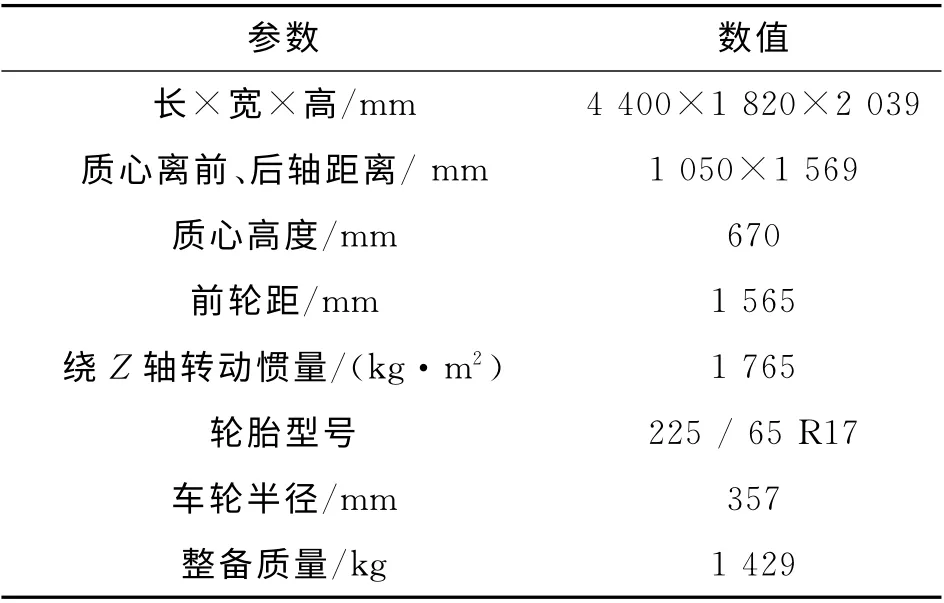
表1 前輪獨立驅動電動汽車車輛參數Tab.1 Parameters of EV with front-in-wheel-motors
2.1 整車驅動力分層控制器
整車驅動力分層控制策略的本質是直接橫擺力矩控制,具有較好的動力學控制效果,且可補償電機輸出誤差.如圖3所示,設計的整車驅動力分層控制策略包括決策層、分配層、穩定層[1].
決策層的車輛參考模型根據來自“人-車-路”觀測器的方向盤轉角輸入δsw、反饋車速v計算出期望橫擺角速度γd和期望質心側偏角;決策層將期望值γd、βd 與反饋的車輛實際橫擺角速度γ 和質心側偏角β 進行對比,經模糊控制得出期望橫擺力矩Mzd;此外,調用的總驅動力制定模塊依據油門踏板開度θd及設定的駕駛感受估算出車輛的期望驅動轉矩Td.分配層考慮一定的約束條件,計算并分配前兩輪的轉矩Tfl、Tfr;穩定層則調用驅動防滑模塊及協調控制模塊,對轉矩Tfl、Tfr進行修正及轉換,最終算出前輪無刷直流電機的電壓Vfl、Vfr.
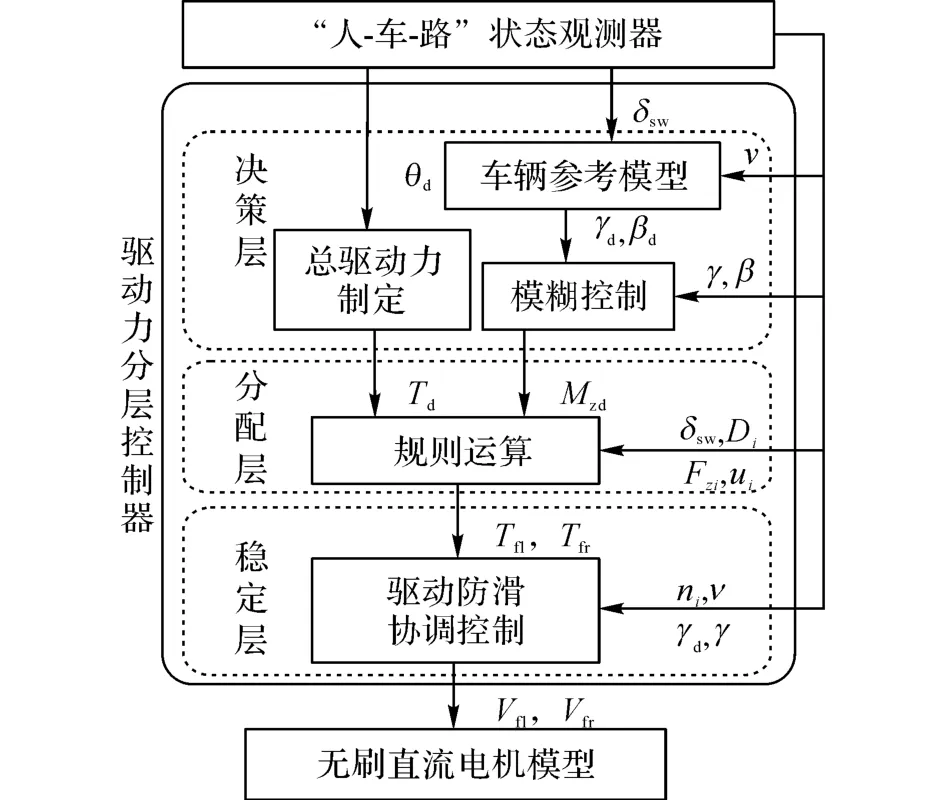
圖3 整車驅動力分層控制器設計框架圖Fig.3 Framework diagram of vehicle driving force hierarchical controller
2.1.1 決策層 當車輛的實際運動狀態與理想狀態之間存在偏差時,決策層根據模糊規則計算出修正車輛行駛的期望橫擺力矩Mzd.采用雙輸入單輸出的控制結構,輸入為橫擺角速度誤差e(γ)=γdγ和質心側偏角誤差e(β)=βd-β,輸出為期望橫擺力矩Mzd.當車輛出現較大不足轉向時,對車輛施加一個正向的橫擺力矩來減小不足轉向趨勢,反之亦然.反模糊化方法選取面積重心法,經過輸入變量的模糊化、模糊規則制定、清晰化,最后得到確定的輸出變量Mzd,圖4是制定的模糊邏輯規則三維視圖,具體不再贅述[9].
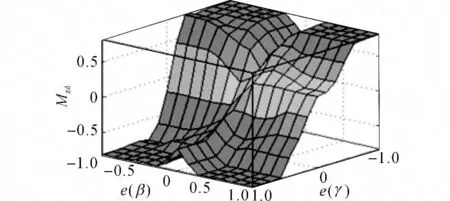
圖4 模糊邏輯規則三維視圖Fig.4 3Dview of fuzzy rule
2.1.2 分配層 驅動力分配層的輸入是期望驅動轉矩Td與期望橫擺力矩Mzd(由車輪縱向力產生的修正橫擺力矩),根據驅動力約束條件式(1)、轉矩關系式(2)和基于3自由度的車輛模型[8]推出的橫擺力矩關系式(3),可求得前輪理想轉矩Tfl、Tfr,具有良好的實時性.
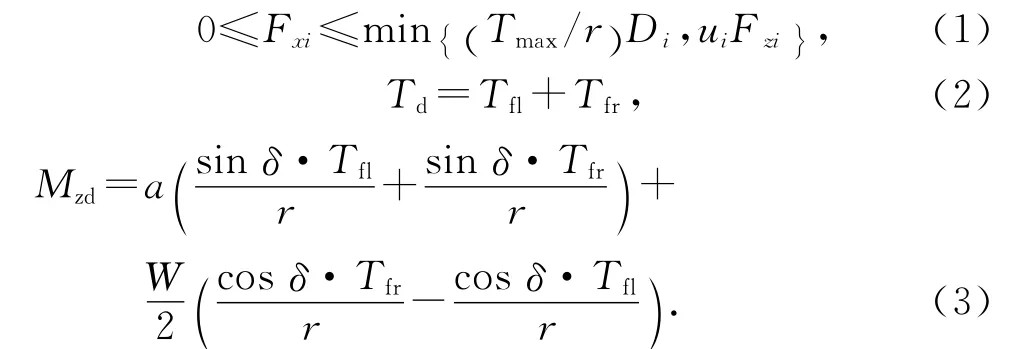
式中:Fxi、Fzi分別為各輪的縱向驅動力和垂直載荷;Tmax為電機最大輸出轉矩;Di為失效因子,表示電機、電機控制器或輪胎的狀態,出故障時為0,正常為1.
2.1.3 穩定層 穩定層調用了驅動防滑模塊及協調控制模塊,驅動防滑采用滑轉率差值的PI控制,協調控制則采用橫擺角速度差值的PI控制.獨立電驅動車輛驅動防滑控制會導致車輛產生非期望的橫擺力矩,削弱車輛橫向穩定性,在高速行駛尤其危險,因此,需要增加協調控制進一步控制車輛的行駛穩定性[10].
2.2 無刷直流電機模型
根據車輛參數及動力性能要求進行動力匹配,選用2個額定電壓為72V、額定功率為5kW 的無刷直流輪轂電機.調用的無刷直流電機電流閉環控制模型[11-12]如圖5,電機及其控制系統參數見表2.

圖5 無刷直流電機模型Fig.5 BLDCM model
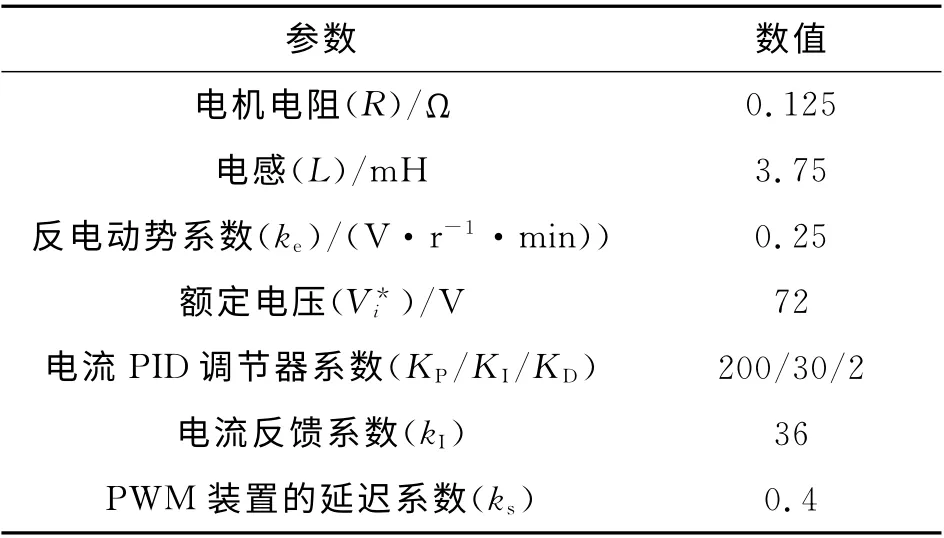
表2 電機及控制系統參數Tab.2 Parameters of motor and control system
3 仿真測試分析
為驗證設計的整車驅動力分層控制系統及仿真測試平臺的有效性,分別進行了前輪獨立驅動電動汽車高速移線及在對開路面上的驅動防滑仿真測試.
3.1 高速移線仿真測試
模擬車輛在良好路面上高速做較大幅度車道變換的極限工況.假設車輛在附著系數為0.85路面上以95km/h穩定行駛后,對方向盤施加周期為12s、100°往復轉向操作.仿真結果如圖6所示.
由圖6可以看出,左前輪驅動轉矩在方向盤轉角變化期間,由80N·m 上升至94N·m,之后下降到最小值74N·m,最后再回到80N·m;右前輪驅動轉矩則由80N·m 下降至最小值68N·m,之后增加到88N·m,最后再回到80N·m,得到了理想的橫擺力矩.同時,隨著驅動輪驅動轉矩的變化,驅動輪實際切向速度有小幅變化,相對于傳統機械差速來說,更能使車輛穩定完成移線換道.表明了驅動分層控制策略在良好路面上以高速做較大幅度車道變換工況的有效性.
3.2 對開路面驅動防滑仿真測試
為驗證驅動防滑+協調控制的控制策略的有效性,進行了對開路面工況下的仿真分析.模擬車輛以45km/h的時速加速行駛,遭遇低附著系數對開路面,即出現單輪滑轉(僅右前輪滑轉)工況,并與未受控制的仿真結果進行了對比分析.
具體設定:路面縱向0 m 到50 m 的路面附著系數為0.38,50 m 之后車輛左側路面附著系數不變,右側路面附著系數降為0.1.路面信息及仿真結果如圖7所示.
針對僅右前輪滑轉這一工況,分層驅動控制系統對右前輪采用單輪驅動防滑控制,對左前輪進行基于理想橫擺角速度的協調控制.由圖7可知,僅帶驅動防滑未帶協調控制的車輛在50 m 之前,車輛還能保持直線穩定行駛;在50m 之后,橫擺角速度迅速變化,車輛發生較大橫向側滑而不斷偏離直線行駛軌道.帶驅動防滑+協調控制的車輛由于前兩輪的驅動轉矩被實時調節,在實現驅動防滑的同時,很好地控制了車輛橫向側滑,保證了行駛的穩定性,驗證了該方法的有效性.
總結以上仿真結果,設計的驅動力分層控制系統能夠實時、有效地對驅動輪轉矩進行控制,實現了差速、驅動防滑及協調控制等基本控制功能.同時,也驗證了所設計的驅動控制系統仿真測試平臺的有效性.
4 結 論
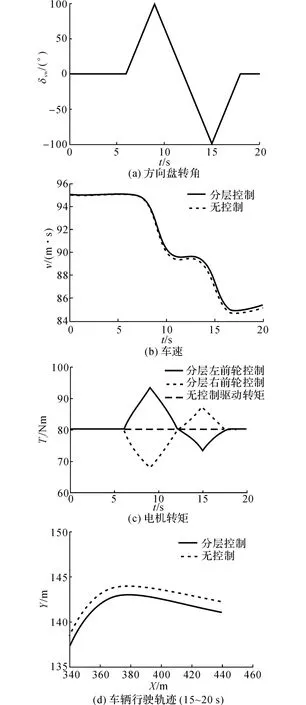
圖6 高速移線工況Fig.6 Line change in high speed condition
基于搭建的電動車輛驅動控制系統仿真測試平臺,設計了前輪獨立驅動電動汽車的驅動力分層控制系統,并在多種復雜工況下進行了仿真測試.仿真結果表明:
(1)搭建的驅動控制系統仿真測試平臺具有可配置性、可重用性及通用性.
(2)設計的驅動力分層控制系統能夠在不同工況下對車輛驅動轉矩進行合理分配,較好地實現了電子差速功能.另外,該控制系統在防止驅動輪過度滑轉的同時,較好地控制了整車的橫擺角速度,保證了車輛的動力性及穩定性.
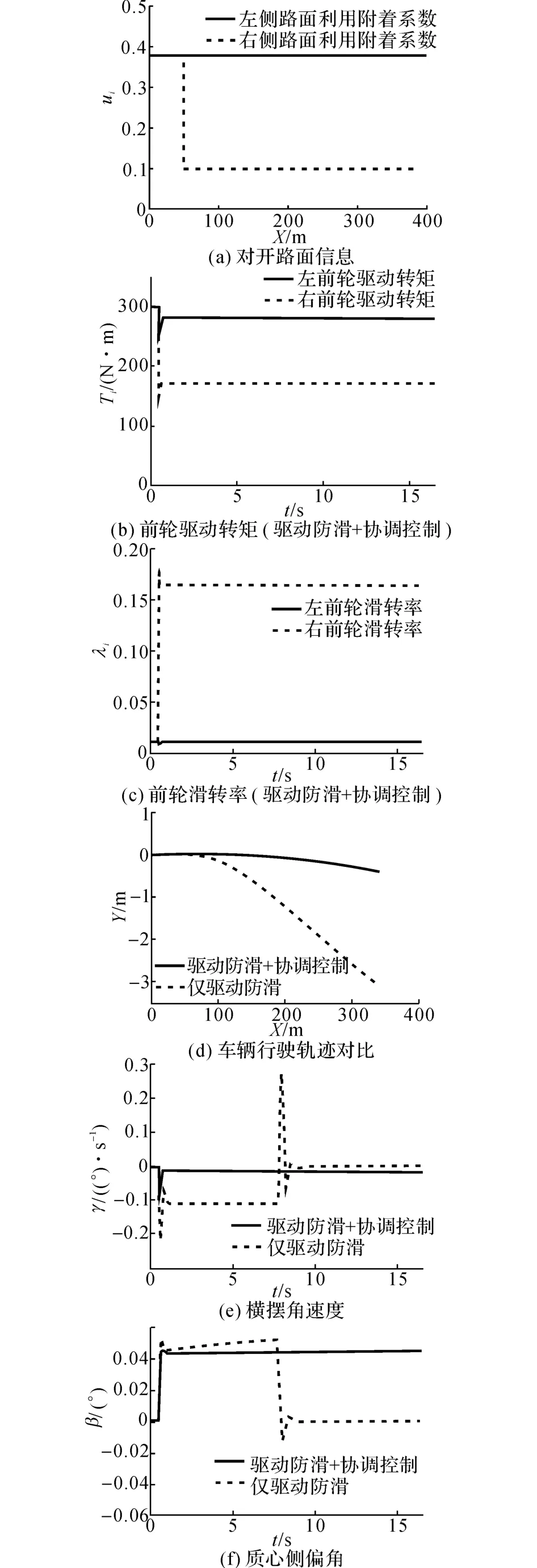
圖7 對開路面仿真結果Fig.7 Simulation result on bisectional road
今后,該仿真測試平臺的完善工作主要集中在改善人機交互界面、不斷擴充模塊庫,進一步方便電動車輛驅動控制系統的開發及測試.
(
):
[1]王博.四輪獨立電驅動車輛實驗平臺及驅動力控制系統研究[D].北京:清華大學,2009.WANG Bo.Study on experiment platform of fourwheel-independent-drive EV and its driving force control system[D].Beijing:Tsinghua University,2009.
[2]褚文博,羅禹貢,趙峰,等.分布式驅動電動汽車驅動轉矩協調控制[J].汽車工程,2012,34(3):185-196.CHU Wen-bo,LUO Yu-gong,ZHAO Feng,et al.Driving torque coordination control of distributed drive electric vehicles[J].Automotive Engineering,2012,34(3):185-196.
[3]靳立強,王慶年,岳巍強,等.基于四輪獨立驅動電動汽車的動力學仿真模型[J].系統仿真學報,2005,17(12):3053-3055.JIN Li-qiang,WANG Qing-nian,YUE Wei-qiang,et al.Dynamic model for simulation of EV with 4independently-driving wheels[J].Journal of System Simulation,2005,17(12):3053-3055.
[4]靳立強,王慶年,宋傳學.電動輪驅動汽車動力學仿真模型及試驗驗證[J].吉林大學學報:工學版,2007,37(4):745-750.JIN Li-qiang,WANG Qing-nian,SONG Chuan-xue.Dynamic simulation model and experimental validation for vehicle with motorized wheels[J].Journal of Jilin University:Engineering and Technology Edition,2007,37(4):745-750.
[5]WANG Qian-nan,ZHAI Li,WANG Jie,et al.Study on acceleration slip regulation torque distribution control strategy for four in-wheel-motors electric vehicle steering[C]∥Control and Decision Conference (CCDC),2013 25th Chinese.[S.l.]:IEEE,2013:3832-3837.
[6]郭孔輝,付皓,丁海濤,等.基于CarSim RT 的車輛穩定性系統控制器開發[J].汽車技術,2008(3):1-4.GUO Kong-hui,FU Hao,DING Hai-tao,et al.Development of controller for vehicle stability system based on CarSim RT[J].Automobile Technology,2008(3):1-4.
[7]于長淼,王偉華,王慶年.饋能懸架阻尼特性及其影響因素[J].吉林大學學報:工學版,2010,40(6):1482-1486.YU Chang-miao,WANG Wei-hua,WANG Qing-nian.Damping characteristic and its influence factors in energy regenerative suspension[J].Journal of Jilin University:Engineering and Technology Edition,2010,40(6):1482-1486.
[8]皮大偉,陳南,王金湘.模糊邏輯在車輛穩定性控制系統中的應用[J].東南大學學報:自然科學版,2008,38(1):44-48.PI Da-wei,CHEN Nan,WANG Jin-xiang.Application of fuzzy-logic to vehicle stability control system[J].Journal of Southeast University:Natural Science Edition,2008,38(1):44-48.
[9]劉孝龍.多輪獨立驅動電動汽車驅動力控制系統研究[D].杭州:浙江大學,2013:21-27.LIU Xiao-long.Study on driving force control system of multi-wheel-independent-drive electric vehicle[D].Hangzhou:Zhejiang University,2013:21-27.
[10]吳志軍.多輪獨立驅動電動汽車驅動控制系統設計[D].杭州:浙江大學,2014:38-46.WU Zhi-jun.Design of driving control system for multi-wheel-independent-drive electric vehicle[D].Hangzhou:Zhejiang University,2014:38-46.
[11]LIU Xiao-long,ZHU Shao-peng,WU Zhi-jun.Dynamic modeling and acceleration control of electric vehicles[J].Advanced Materials Research,2012,476-478:944-948.
[12]汪貴平,馬建,楊盼盼,等.電動汽車起步加速過程的動力學建模與仿真[J].長安大學學報:自然科學版,2009,29(6):98-102.WANG Gui-ping,MA Jian,YANG Pan-pan,et al.Dyanmic modeling and simulation of starting and acceleration for electric vehicle[J].Journal of Chang’an University:Natural Science,2009,29(6):98-102.
