機(jī)載順軌干涉合成孔徑雷達(dá)定標(biāo)中地面控制點(diǎn)的布設(shè)策略研究
2015-07-18 11:10:40李紀(jì)傳
電子與信息學(xué)報(bào) 2015年7期
張 慧 洪 峻 王 宇 李紀(jì)傳
①(中國(guó)科學(xué)院電子學(xué)研究所 北京 100190)
②(中國(guó)科學(xué)院大學(xué) 北京 100049)
③(空間信息處理與應(yīng)用系統(tǒng)技術(shù)重點(diǎn)實(shí)驗(yàn)室 北京 100190)
機(jī)載順軌干涉合成孔徑雷達(dá)定標(biāo)中地面控制點(diǎn)的布設(shè)策略研究
張 慧*①②③洪 峻①王 宇①李紀(jì)傳①②
①(中國(guó)科學(xué)院電子學(xué)研究所 北京 100190)
②(中國(guó)科學(xué)院大學(xué) 北京 100049)
③(空間信息處理與應(yīng)用系統(tǒng)技術(shù)重點(diǎn)實(shí)驗(yàn)室 北京 100190)
機(jī)載順軌干涉合成孔徑雷達(dá)(ATI-SAR)估計(jì)運(yùn)動(dòng)目標(biāo)徑向速度的精度受干涉相位誤差、基線分量誤差等影響,因此為了得到較高的測(cè)速精度必須對(duì)ATI-SAR的系統(tǒng)參數(shù)進(jìn)行定標(biāo)處理。基于敏感度方程的定標(biāo)方法是干涉SAR定標(biāo)中的常用方法,但是其性能受敏感度矩陣條件數(shù)的影響,地面控制點(diǎn)(GCP)或角反射器的布設(shè)方式?jīng)Q定了敏感度矩陣的條件數(shù)大小。該文通過(guò)分析給出機(jī)載ATI-SAR系統(tǒng)定標(biāo)中GCP的布設(shè)策略,包括靜止GCP的布設(shè)方式及運(yùn)動(dòng)GCP的數(shù)量、布設(shè)位置、運(yùn)動(dòng)速度大小和方向的設(shè)置原則,并通過(guò)仿真手段對(duì)上述布設(shè)策略進(jìn)行了驗(yàn)證。
合成孔徑雷達(dá);順軌干涉;定標(biāo);地面控制點(diǎn);矩陣條件數(shù)
1 引言
機(jī)載順軌干涉合成孔徑雷達(dá)(Along-Track Interferometric SAR,ATI-SAR)最早由文獻(xiàn)[1]提出,其利用兩個(gè)(或兩個(gè)以上)沿載機(jī)飛行方向放置的天線以一定的時(shí)間間隔先后對(duì)同一場(chǎng)景進(jìn)行成像。載機(jī)飛行過(guò)程中兩個(gè)天線運(yùn)動(dòng)到同一位置時(shí)與靜止目標(biāo)的斜距相同而與運(yùn)動(dòng)目標(biāo)的斜距不同,從而使兩個(gè)天線的成像結(jié)果進(jìn)行干涉處理時(shí),靜止目標(biāo)對(duì)應(yīng)的相位相互抵消而運(yùn)動(dòng)目標(biāo)對(duì)應(yīng)的干涉相位被保留下來(lái),且相位大小與目標(biāo)的徑向速度成正比,由此可以根據(jù)干涉相位檢測(cè)運(yùn)動(dòng)目標(biāo)并估計(jì)運(yùn)動(dòng)目標(biāo)的徑向速度。由于 ATI-SAR具有檢測(cè)慢速運(yùn)動(dòng)目標(biāo)徑向速度的能力,因此被廣泛應(yīng)用于海面洋流檢測(cè)[24]-和地面動(dòng)目標(biāo)檢測(cè)[5,6]領(lǐng)域。載機(jī)飛行的不穩(wěn)定性以及系統(tǒng)參數(shù)的定標(biāo)精度是影響機(jī)載順軌干涉SAR測(cè)速精度的主要因素,其中SAR平臺(tái)的不穩(wěn)定性可以在處理階段得到校正[7]。為了獲得較高的測(cè)速精度,必須對(duì)機(jī)載 ATI-SAR系統(tǒng)參數(shù)進(jìn)行定標(biāo)處理[810]-。基于敏感度方程的定標(biāo)方法是干涉SAR中常用的定標(biāo)方法[11],在順軌干涉SAR的定標(biāo)中,敏感度方程建立了目標(biāo)測(cè)速誤差與系統(tǒng)參數(shù)估計(jì)誤差之間的聯(lián)系。基于敏感度方程的定標(biāo)方法的定標(biāo)性能與敏感度矩陣的病態(tài)性有關(guān),而矩陣的病態(tài)性可以由矩陣條件數(shù)來(lái)描述。影響敏感度矩陣條件數(shù)的因素包括待定標(biāo)參數(shù)的種類和數(shù)量、地面控制點(diǎn)(Ground Control Point,GCP)的個(gè)數(shù)以及控制點(diǎn)的布設(shè)方式[12],因此在定標(biāo)參數(shù)一定的情況下需要選擇合理的GCP布設(shè)方案,使敏感度矩陣的條件數(shù)最小。
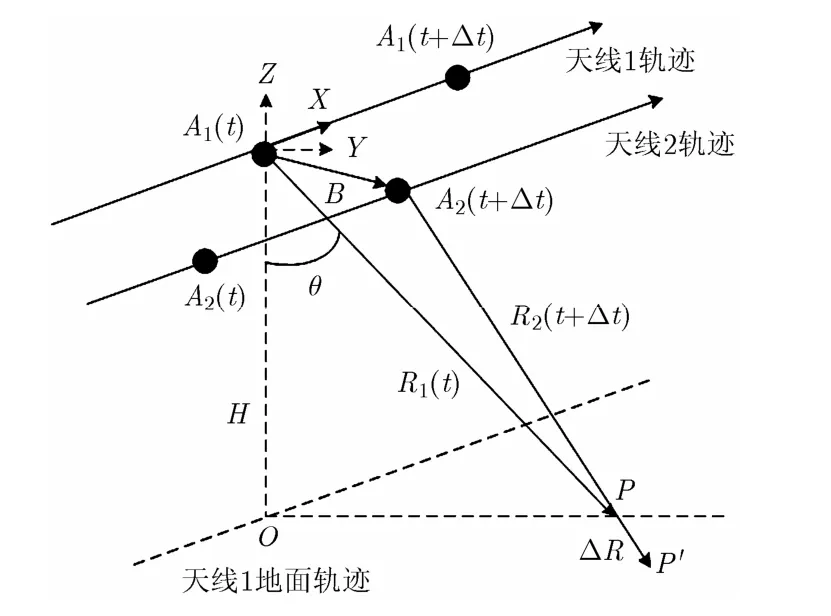
圖1 機(jī)載ATI-SAR成像幾何
對(duì)于對(duì)地形高程敏感的交軌干涉 SAR(Cross-Track Interferometric SAR,XTI-SAR),文獻(xiàn)[7]和文獻(xiàn)[12]都對(duì)其定標(biāo)中 GCP的布設(shè)方案進(jìn)行了研究,其中文獻(xiàn)[7]指出 XTI-SAR敏感度矩陣的條件數(shù)與待定標(biāo)參數(shù)的數(shù)量及 GCP沿距離向的分布有關(guān),并比較了不同待定標(biāo)參數(shù)下 3種典型的 GCP布設(shè)方式所對(duì)應(yīng)的矩陣條件數(shù)大小;文獻(xiàn)[12]在文獻(xiàn)[7]的基礎(chǔ)上,進(jìn)一步給出了定標(biāo)器的布放規(guī)則及布放間距約束條件。雖然目前機(jī)載 ATI-SAR系統(tǒng)定標(biāo)中仍然采用基于敏感度方程的定標(biāo)方法標(biāo)定干涉相位偏差及基線分量誤差[13],但是目前沒(méi)有文獻(xiàn)對(duì)機(jī)載順軌干涉SAR定標(biāo)中的GCP布設(shè)策略進(jìn)行分析和報(bào)道。鑒于此,本文根據(jù)順軌干涉SAR的工作原理,分析了機(jī)載ATI-SAR定標(biāo)中不同的GCP數(shù)量及布放方式對(duì)敏感度矩陣條件數(shù)的影響,同時(shí)分析了運(yùn)動(dòng)控制點(diǎn)的速度和位置的影響,提出了一種既能降低敏感度矩陣條件數(shù)又便于實(shí)施的 ATISAR定標(biāo)的GCP布設(shè)方案。
本文的安排如下:第2節(jié)簡(jiǎn)單介紹了ATI的測(cè)速原理及基于敏感度方程的定標(biāo)方法;第3節(jié)分析了不同的 GCP布設(shè)方式對(duì)敏感度矩陣條件數(shù)的影響,包括靜止GCP沿距離向的布設(shè)方式及運(yùn)動(dòng)GCP的速度和位置的設(shè)置,并通過(guò)仿真手段對(duì)各種布設(shè)條件下的矩陣條件數(shù)進(jìn)行了比較,給出了較優(yōu)的GCP設(shè)置方案;第4節(jié)為全文的總結(jié)部分。
2 測(cè)速原理及定標(biāo)方法
2.1 ATI-SAR的工作原理
圖1為正側(cè)視情況下機(jī)載ATI-SAR的工作幾何,圖中的坐標(biāo)系以O(shè)點(diǎn)為原點(diǎn),O為方位零時(shí)刻參考天線相位中心的地面投影點(diǎn),X軸平行于載機(jī)飛行的方向,Z軸豎直向上,Y軸與X,Z軸成左手坐標(biāo)系。圖中考慮了兩個(gè)天線的運(yùn)動(dòng)軌跡不完全在同一條直線上排列的非理想情況。為簡(jiǎn)便,本文中假設(shè)ATI-SAR工作在“乒乓”工作模式[14],即兩個(gè)天線交替地發(fā)射和接收自己發(fā)射的電磁波。此時(shí)由于目標(biāo)沿徑向的運(yùn)動(dòng)及垂直基線分量的存在引起的干涉相位大小為[15,16]:

其中,λ為波長(zhǎng),θ為下視角,基線矢量B在3個(gè)坐標(biāo)軸方向的分量大小分別為順軌基線分量xB、跨航向基線分量 yB和豎直方向基線分量 zB, tΔ 為兩個(gè)天線到達(dá)同一位置所需的時(shí)間間隔,在“乒乓”模式下 Δt =Bx/,vppv為平臺(tái)的運(yùn)動(dòng)速度。假設(shè)平臺(tái)的高度為H,目標(biāo)的高度與參考高程相同,設(shè)為0,則cos θ= H / R( t),其中 R( t)為t時(shí)刻參考天線與目標(biāo)之間的最短斜距。由式(1)易得運(yùn)動(dòng)目標(biāo)的徑向速度表達(dá)式:

敏感度反映了各干涉參量的誤差對(duì)目標(biāo)徑向速度精度的影響程度。將式(2)中目標(biāo)徑向速度rv關(guān)于各干涉參量求偏導(dǎo)數(shù),即可得到目標(biāo)徑向速度關(guān)于上述各參量的敏感度,具體可參見(jiàn)文獻(xiàn)[14],這里不再一一列舉。
2.2 基于敏感度方程的ATI-SAR定標(biāo)方法
敏感度方程建立了目標(biāo)徑向速度估計(jì)誤差與干涉參量偏差之間的聯(lián)系,即

其中,rΔv為 1L× 的速度誤差向量,F(xiàn)為L(zhǎng) N× 的敏感度矩陣,N為噪聲向量,ΔX為 1N× 的待估計(jì)參數(shù)的偏差組成的向量,。這里L(fēng)為控制點(diǎn)的數(shù)量,N為待定標(biāo)參數(shù)的數(shù)量,且L N≥ 。敏感度矩陣F表示為
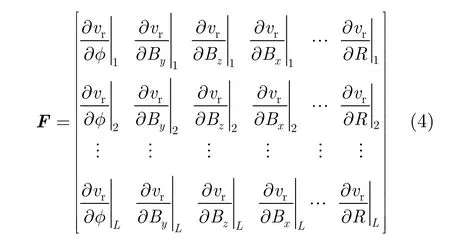
對(duì)于線性方程式(3),系數(shù)矩陣F的條件數(shù)越大,矩陣的病態(tài)性越強(qiáng)[17],由此引入的誤差越大。因此在后面的定標(biāo)點(diǎn)布設(shè)策略分析中,可以利用矩陣條件數(shù)作為衡量定標(biāo)性能的工具之一。
3 機(jī)載ATI-SAR定標(biāo)中GCP的布設(shè)策略
3.1 靜止GCP的布設(shè)
順軌干涉SAR對(duì)運(yùn)動(dòng)目標(biāo)的徑向速度敏感,但是運(yùn)動(dòng)的GCP在實(shí)際中難以控制。并且在標(biāo)定干涉相位偏差和基線的兩個(gè)垂直分量 By, Bz時(shí),不需要運(yùn)動(dòng)控制點(diǎn)即可標(biāo)定,因此為簡(jiǎn)便,本文選擇靜止目標(biāo)對(duì)除順軌基線分量xB以外的干涉參數(shù)進(jìn)行定標(biāo)。
對(duì)于機(jī)載ATI-SAR,當(dāng)只考慮靜止GCP并且忽略ATI時(shí)間間隔造成的時(shí)間去相干時(shí),所布設(shè)靜止GCP的相位大小完全由垂直基線分量引起,此時(shí)ATI-SAR系統(tǒng)等價(jià)于小基線的XTI-SAR系統(tǒng)。關(guān)于交軌干涉SAR定標(biāo)中地面控制點(diǎn)的布設(shè)問(wèn)題,文獻(xiàn)[7]和文獻(xiàn)[12]已通過(guò)理論分析和試驗(yàn)驗(yàn)證給出了GCP的布設(shè)原則,即所有GCP不能集中在某一區(qū)域,而是盡可能充滿整個(gè)距離向測(cè)繪帶,且沿方位向布設(shè)若干列。因此,與交軌干涉SAR定標(biāo)中定標(biāo)器的布設(shè)原則類似,ATI-SAR定標(biāo)中靜止GCP沿距離向布設(shè)時(shí)也應(yīng)盡量充滿整個(gè)測(cè)繪帶。下面通過(guò)設(shè)置幾種不同的靜止GCP的布放方式,利用仿真的手段對(duì)各種布設(shè)方式下的矩陣條件數(shù)進(jìn)行比較,從而對(duì)上述結(jié)論進(jìn)行驗(yàn)證。
圖2針對(duì)某一距離條帶選擇了8種不同的GCP布設(shè)方式,其中橫軸代表距離向,假設(shè)所選定標(biāo)場(chǎng)平坦且與參考高程相同。圖中前3種布設(shè)方式為所有GCP集中在某一區(qū)域的情況,后5種布設(shè)方式中GCP以不同分布情況充滿整個(gè)測(cè)繪帶,各子圖的布設(shè)方式分別為
布設(shè)方式1:所有GCP集中在近距端;
布設(shè)方式2:所有GCP集中在遠(yuǎn)距端;
布設(shè)方式3:所有GCP集中在測(cè)繪帶中間;
布設(shè)方式4:所有GCP按照從近距端到遠(yuǎn)距端越來(lái)越稀疏的方式布滿整個(gè)測(cè)繪帶,相鄰兩個(gè)GCP之間的距離按照等差數(shù)列的方式遞增;
布設(shè)方式5:同方式4,但是相鄰兩個(gè)GCP之間的距離按照等比數(shù)列的方式遞增;
布設(shè)方式6:所有GCP按照從近距端到遠(yuǎn)距端越來(lái)越密集的方式布滿整個(gè)測(cè)繪帶,相鄰兩個(gè)GCP之間的距離按照等差數(shù)列的方式遞減;
布設(shè)方式7:同方式6,但是相鄰兩個(gè)GCP之間的距離按照等比數(shù)列的方式遞減;
布設(shè)方式8:所有GCP均勻布滿整個(gè)測(cè)繪帶。
利用表1中的仿真參數(shù),對(duì)不同GCP數(shù)量下不同 GCP布設(shè)方式所對(duì)應(yīng)的矩陣條件數(shù)大小進(jìn)行比較,結(jié)果如圖3所示。其中圖3(a),3(c),3(e)為3種待定標(biāo)參數(shù)情況下所有布設(shè)條件下的矩陣條件數(shù),圖3(b),3(d),3(f)為3種待定標(biāo)參數(shù)情況下后5種布設(shè)方式所對(duì)應(yīng)的矩陣條件數(shù)大小。
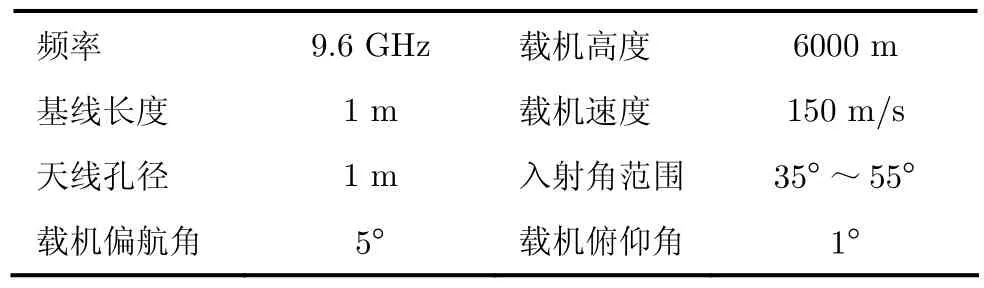
表1 載機(jī)仿真參數(shù)
由圖3可得,隨著待定標(biāo)參數(shù)的增加,矩陣條件數(shù)增大;前3種GCP布設(shè)方式下的矩陣條件數(shù)遠(yuǎn)大于其他5種布設(shè)方式,即所有GCP都集中在某一區(qū)域時(shí)矩陣條件數(shù)較大,當(dāng)GCP沿距離向充滿整個(gè)距離條帶時(shí)對(duì)應(yīng)的矩陣條件數(shù)較小。因此靜止GCP的布設(shè)方案可以歸納為:
(1)使所有靜止GCP沿距離向盡可能充滿整個(gè)距離條帶。
考慮到載機(jī)飛行不穩(wěn)定性主要體現(xiàn)在不同方位向之間,因此為了標(biāo)定載機(jī)不穩(wěn)定性的測(cè)量偏差,還需要在不同的方位時(shí)刻布設(shè)定標(biāo)器,即:
(2)在方案(1)的基礎(chǔ)上,定標(biāo)器沿方位向布放若干列。
3.2 運(yùn)動(dòng)控制點(diǎn)的設(shè)置
順軌干涉SAR中順軌基線分量xB只有在存在運(yùn)動(dòng)目標(biāo)時(shí)才對(duì)干涉相位有貢獻(xiàn),因此要在敏感度方程定標(biāo)方法中直接對(duì)xB大小進(jìn)行標(biāo)定,至少需要一個(gè)運(yùn)動(dòng)GCP。關(guān)于運(yùn)動(dòng)GCP的布設(shè),主要考慮運(yùn)動(dòng)GCP的數(shù)量、位置、速度的方向和大小對(duì)定標(biāo)精度的影響。
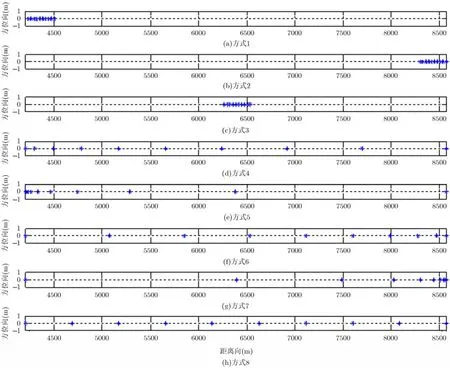
圖2 距離條帶內(nèi)不同的GCP布設(shè)方式
3.2.1 運(yùn)動(dòng)控制點(diǎn)的數(shù)量和位置設(shè)置 理想情況下如果控制點(diǎn)的速度、位置等信息的精度足夠高,則只需采用一個(gè)運(yùn)動(dòng)GCP就能標(biāo)定順軌基線分量xB的大小。但是只選擇一個(gè)運(yùn)動(dòng)GCP會(huì)增大偶然誤差出現(xiàn)的概率,在試驗(yàn)條件允許的情況下可以設(shè)置多個(gè)運(yùn)動(dòng)GCP,以降低偶然誤差出現(xiàn)的幾率。理論上選擇一個(gè)運(yùn)動(dòng)GCP與選擇多個(gè)運(yùn)動(dòng)GCP所對(duì)應(yīng)的矩陣條件數(shù)在同一量級(jí)上,仿真結(jié)果同樣證明了這一點(diǎn)。而采用的運(yùn)動(dòng)GCP的個(gè)數(shù)越多,工程實(shí)現(xiàn)起來(lái)越困難,通過(guò)綜合考慮,可以選取運(yùn)動(dòng)GCP的個(gè)數(shù)為1~3個(gè),且各運(yùn)動(dòng)GCP的速度均應(yīng)遠(yuǎn)離0值附近。本文中后續(xù)仿真中為簡(jiǎn)便,在分析運(yùn)動(dòng) GCP的位置和速度設(shè)置時(shí),均選擇1個(gè)運(yùn)動(dòng)GCP進(jìn)行分析。
在表1所示的仿真參數(shù)下,選擇一個(gè)運(yùn)動(dòng)GCP,仿真該運(yùn)動(dòng) GCP所在位置對(duì)敏感度矩陣條件數(shù)的影響。圖4(a)~4(f)分別選取了4~9個(gè)GCP進(jìn)行仿真,其中橫坐標(biāo)表示從近距端到遠(yuǎn)距端運(yùn)動(dòng) GCP的序號(hào)(其他 GCP設(shè)為靜止,且沿距離向均勻布設(shè)),縱坐標(biāo)表示相應(yīng)的矩陣條件數(shù)。
從圖4中可以看出,當(dāng)GCP的個(gè)數(shù)為L(zhǎng)時(shí),對(duì)各個(gè)GCP從近距到遠(yuǎn)距分別編號(hào)為1,2,,… L,則要使矩陣條件數(shù)最小,速度設(shè)置為非零的GCP的標(biāo)號(hào)i應(yīng)滿足:

其中,round()·表示四舍五入,即L為偶數(shù)時(shí),i L/=2 ;L為奇數(shù)時(shí), i( = L1+) /2,即運(yùn)動(dòng)的GCP位于測(cè)繪帶的中心。本次仿真中假設(shè)運(yùn)動(dòng)GCP的徑向速度為0.5 m/s,選擇其它速度值可以得到同樣的結(jié)論。
3.2.2 運(yùn)動(dòng)控制點(diǎn)的速度大小和方向 在 ATI-SAR中,運(yùn)動(dòng)目標(biāo)的徑向速度影響干涉相位的大小,而方位向速度會(huì)影響圖像的聚焦效果[18,19]。下面分別對(duì)運(yùn)動(dòng) GCP的徑向速度和方位向速度的設(shè)置原則進(jìn)行討論。(1)徑向速度 為保證ATI-SAR干涉相位不發(fā)生纏繞,一般要求運(yùn)動(dòng)目標(biāo)的徑向速度小于 ATISAR的最大不模糊速度。在表1所列的仿真參數(shù)下,
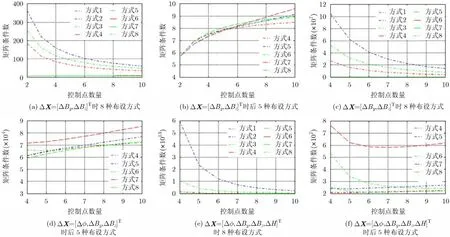
圖3 不同GCP布設(shè)形式下的矩陣條件數(shù)
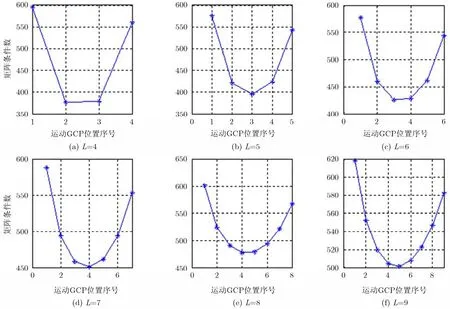
圖4 不同控制點(diǎn)個(gè)數(shù)L下運(yùn)動(dòng)GCP的不同位置對(duì)矩陣條件數(shù)的影響
ATI的最大不模糊速度約為2.35 m/s。同時(shí),在ATISAR動(dòng)目標(biāo)檢測(cè)中,當(dāng)由于目標(biāo)徑向速度引入的干涉相位較大(遠(yuǎn)離檢測(cè)門(mén)限)時(shí)運(yùn)動(dòng)目標(biāo)的徑向速度更容易檢測(cè),因此在定標(biāo)中運(yùn)動(dòng)GCP的徑向速度應(yīng)盡量大但不超過(guò)最大不模糊速度,在本文的仿真參數(shù)下可以選擇在1~2 m/s左右,此類目標(biāo)可選擇為一輛配有GPS的小推車,如美國(guó)JPL用于驗(yàn)證機(jī)載ATI-SAR GMTI功能的試驗(yàn)[4]。另一方面,由于運(yùn)動(dòng)目標(biāo)是作為控制點(diǎn)使用的,其速度和位置信息可以由配備的GPS等設(shè)備進(jìn)行測(cè)量,因此當(dāng)目標(biāo)的徑向速度偏大而導(dǎo)致干涉相位超出2π的范圍時(shí),相位纏繞的整數(shù)倍的數(shù)值是可以通過(guò)系統(tǒng)參數(shù)估計(jì)出來(lái)的,此時(shí)可以對(duì)ATI-SAR干涉相位進(jìn)行精確解纏,利用解纏的相位和目標(biāo)徑向速度值標(biāo)定順軌基線分量xB。從這一方面講,運(yùn)動(dòng)GCP的徑向速度可以大于最大不模糊速度,此時(shí)可以選擇帶有角反射器及GPS的汽車、卡車等。因此,在不考慮運(yùn)動(dòng)目標(biāo)徑向速度對(duì)成像質(zhì)量的影響的情況下,運(yùn)動(dòng)控制點(diǎn)的徑向速度可以不受ATI-SAR最大不模糊速度的限制,從理論上講,盡量保證干涉相位的相位主值的絕對(duì)值遠(yuǎn)離0值附近即可。
以一個(gè)運(yùn)動(dòng)GCP為例,圖5仿真了不同GCP徑向速度對(duì)應(yīng)的敏感度矩陣條件數(shù)。圖5的結(jié)果同樣表明,當(dāng)GCP的徑向速度在0值附近時(shí)敏感度矩陣的條件數(shù)較大,即測(cè)量誤差對(duì)定標(biāo)結(jié)果的影響越大。
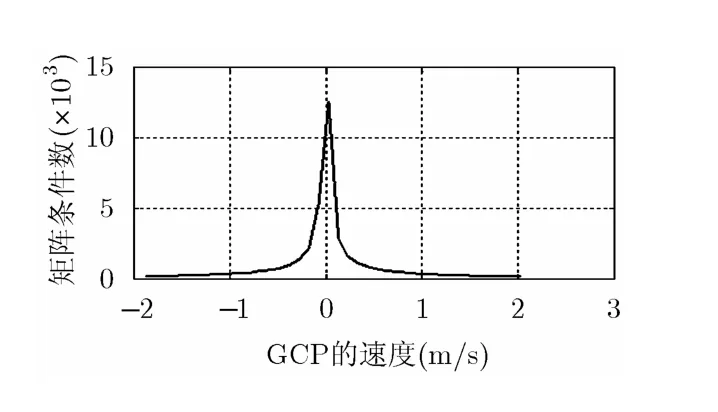
圖5 GCP的徑向速度對(duì)敏感度矩陣條件數(shù)的影響
(2)方位向速度 當(dāng)運(yùn)動(dòng)目標(biāo)存在方位向速度va時(shí),運(yùn)動(dòng)目標(biāo)的相位歷程與方位壓縮中參考相位歷程不同從而產(chǎn)生方位模糊[18,19]。在方位壓縮中,參考方位匹配濾波器對(duì)應(yīng)的相位歷程為

其中0R為最短斜距。忽略目標(biāo)的徑向速度和加速度,則運(yùn)動(dòng)目標(biāo)的實(shí)際相位歷程為

因此在一個(gè)合成孔徑時(shí)間內(nèi)二者之差造成的二次相位誤差為

一般工程應(yīng)用中,要保證圖像不散焦,在合成孔徑時(shí)間內(nèi)二次相位誤差應(yīng)該不超過(guò) /4π 。令式(8)中并假設(shè) vp? va,則可以得到目標(biāo)方位向速度的約束條件:

因此,為了減小目標(biāo)方位向速度引起的圖像模糊,應(yīng)盡量使運(yùn)動(dòng)目標(biāo)的運(yùn)動(dòng)方向與載機(jī)飛行方向垂直,從而保證目標(biāo)的方位向速度近似為 0,滿足不等式(9)的要求。以表1中的仿真參數(shù)為例,最短斜距取8000 m,則
綜上,運(yùn)動(dòng)GCP的速度、位置設(shè)置規(guī)則可歸納為:
(1)運(yùn)動(dòng)GCP的運(yùn)動(dòng)方向應(yīng)盡量垂直于載機(jī)的飛行方向,從而使目標(biāo)方位向速度近似為零,滿足不等式(9)的要求,以降低圖像散焦;
(2)運(yùn)動(dòng)目標(biāo)的徑向速度或纏繞后的徑向速度應(yīng)盡量遠(yuǎn)離速度零值、接近ATI-SAR的最大不模糊速度;
(3)為簡(jiǎn)便可選擇1個(gè)運(yùn)動(dòng)GCP,使其位于距離向測(cè)繪帶的中心;如果選擇2個(gè)或2個(gè)以上運(yùn)動(dòng)GCP,這些運(yùn)動(dòng)GCP與靜止GCP的布設(shè)規(guī)則相同,且徑向速度均不能接近0。
4 結(jié)束語(yǔ)
該文針對(duì)基于敏感度方程的機(jī)載 ATI-SAR干涉相位偏置誤差、基線分量誤差等的定標(biāo)方法,研究了不同的GCP布設(shè)方案,包括靜止GCP沿距離向的布設(shè)方式及運(yùn)動(dòng)GCP的速度、運(yùn)動(dòng)方向、位置的布設(shè)規(guī)則,提出了使敏感度矩陣條件數(shù)極小化的布設(shè)規(guī)則。仿真和分析證明,為得到較小的矩陣條件數(shù),靜止GCP應(yīng)盡可能充滿整個(gè)距離條帶;要得到順軌基線分量的準(zhǔn)確值,需布設(shè)至少一個(gè)運(yùn)動(dòng)GCP,且運(yùn)動(dòng)GCP盡量選擇在距離條帶的中心,運(yùn)動(dòng)GCP的運(yùn)動(dòng)方向盡量垂直于載機(jī)飛行方向,徑向速度或纏繞后的徑向速度應(yīng)盡量遠(yuǎn)離0值附近。該文的分析為機(jī)載順軌干涉 SAR外定標(biāo)試驗(yàn)的地面控制點(diǎn)布設(shè)提供了參考。
[1] Goldstein R M and Zebker H A. Interferometric radar measurement of ocean surface currents[J]. Nature,1987,328:470-475.
[2] Romeiser R,Runge H,Suchandt S,et al.. Quality assessment of surface current fields from TerraSAR-X and TanDEM-X along-track interferometry and Doppler centroid analysis[J]. IEEE Transactions on Geoscience and Remote Sensing,2014,52(5):2759-2772.
[3] Lopez D P,Rodriguez C M,Parts P,et al.. Experimental bidirectional SAR ATI acquisitions of the ocean surface with TanDEM-X[C]. 10th European Conference on Synthetic Aperture Radar (EUSAR),Berlin,Germany,2014:1-4.
[4] Goncharenko Y V and Farquharson G. ATI SAR signatures of nearshore ocean breaking waves obtained from field measurements[C]. Proceedings of the IEEE International Geoscience and Remote Sensing Symposium (IGARSS),Melbourne,Australia,2013:326-329.
[5] Stacy N and Preiss M. Polarimetric ATI slow target detection in a log likelihood framework[C]. Proceedings of the IEEE International Geoscience and Remote Sensing Symposium(IGARSS),Melbourne,Australia,2013:3163-3166.
[6] Imel D A. AIRSAR along-track interferometry data[R]. 4800 Oak Grove Drive,Pasadena,2002.
[7] Mallorqui J J,Bara M,and Broquetas A. Calibration requirements for airborne SAR interferometry[C]. Proceedings of SPIE,SAR Image Analysis,Modeling,and Techniques III, Barcelona,Spain,2000(4173):267-278.
[8] Deng H Z,Goncharenko Y V,and Farquharson G. Phase calibration of an along-track interferometric FMCW SAR[C]. Proceedings of the IEEE International Geoscience and Remote Sensing Symposium (IGARSS), Melbourne,Australia,2013:1649-1652.
[9] Hirsch O. Calibration of an airborne along-track interferometric SAR system for accurate measurement of velocities[C]. Proceedings of the IEEE Geoscience and Remote Sensing Symposium (IGARSS),Sydney,Australia,2001(1):558-560.
[10] Zhang W D,Song N,Dong X W,et al.. Airborne SARATI-GMTI data processing[C]. Proceedings of the International Conference on Digital Manufacturing and Automation,Qingdao,China,2013:122-125.
[11] Mallorqui J J,Bara M,and Broquetas A. Sensitivity equations and calibration requirements on airborne interferometry[C]. Proceedings of the IEEE Geoscience and Remote Sensing Symposium (IGARSS),Honolulu,America, 2000(6):2739-2741.
[12] 王彥平,彭海良,云日升. 機(jī)載干涉合成孔徑雷達(dá)定標(biāo)中的定標(biāo)器布放[J]. 電子與信息學(xué)報(bào),2004,26(1):89-94.
Wang Yan-ping,Peng Hai-liang,and Yun Ri-sheng. Locating calibrators in airborne InSAR calibration[J]. Journal of Electronics and Information Technology,2004,26(1):89-94.
[13] 王欣. 機(jī)載ATI-SAR基線定標(biāo)方法研究[D]. [碩士論文],中國(guó)科學(xué)院電子學(xué)研究所,2012.
Wang Xin. Study on baseline calibration method for airborne ATI-SAR[D]. [Master dissertation],Institute of Electronics,Chinese Academy of Sciences,2012.
[14] Zhang Y H. Along Track Interferometry Synthetic Aperture Radar (ATI-SAR) techniques for ground moving target detection[R]. Final Technical Report,Hillside Terrace Marcy New York,2006.
[15] Moccia A and Rufino G. Spaceborne Along-Track SAR Interferometry:performance analysis and mission scenarios[J]. IEEE Transactions on Aerospace and Electronic Systems,2001,37(1):199-213.
[16] Zhang H and Hong J. Sensitivity analysis of Along-Track Interferometric Synthetic Aperture Radar (ATI-SAR) in the presence of squint[C]. Proceedings of the IET International Radar Conference,Xi'an,China,2013:1-5.
[17] 鄒謀炎. 反卷積和信號(hào)復(fù)原[M]. 北京:國(guó)防工業(yè)出版社,2001:87-88,224-226.
Zou Mou-yan. Deconvolution and Signal Recovery[M]. Beijing:National Defence Industry Press,2001:87-88,224-226.
[18] Raney R K. Synthetic aperture imaging radar and moving targets [J]. IEEE Transactions on Aerospace and Electronic Systems,1971,AES-7(3):499-505.
[19] Chen C W. Performance assessment of along-track interferometry for detecting ground moving targets[C]. Proceedings of the IEEE Radar Conference,Wyndham,PA,USA,2004:99-104.
張 慧: 女,1987年生,博士生,研究方向?yàn)闄C(jī)載順軌干涉SAR定標(biāo)及處理.
洪 峻: 男,1960年生,研究員,研究方向?yàn)楹铣煽讖嚼走_(dá)定標(biāo)及定量遙感應(yīng)用技術(shù)研究.
王 宇: 男,1976年生,副研究員,研究方向?yàn)闄C(jī)載SAR定標(biāo)、雷達(dá)信號(hào)處理.
李紀(jì)傳: 男,1988年生,博士生,研究方向?yàn)槔走_(dá)信號(hào)處理.
Study on Ground Control Point Locating Strategy for Airborne Along-track Interferometric SAR
Zhang Hui①②③Hong Jun①Wang Yu①Li Ji-chuan①②
①(Institute of Electronics, Chinese Academy of Sciences, Beijing 100190,China)
②(University of Chinese Academy of Sciences, Beijing 100049,China)
③(Key Laboratory of Technology in Geo-spatial Information Processing and Application System, Beijing 100190, China)
The accuracy of the radial velocity estimated by the airborne Along-Track Interferometric SAR(ATI-SAR) is affected by the accuracy of different system parameter,such as the interferometric phase biases and the baseline components errors. Therefore,these factors must be calibrated if the higher radial velocity estimation accuracy is required. The calibration methods based on the sensitivity equations are generally used in the interferometric SAR calibration. However,the performance of these methods is limited by the matrix condition number of the sensitivity matrix,which is decided by the location strategy of Ground Control Points (GCP). This study analyses and simulates the condition number of the sensitivity matrix corresponding to the different GCP distribution ways along the swath as well as the different selections of velocities and positions of moving ground control points.
SAR;Along-Track Interferometry (ATI);Calibration;Ground Control Point (GCP);Matrix condition number
TN959.73
A
1009-5896(2015)07-1716-07
10.11999/JEIT141220
2014-09-17收到,2015-02-15改回,2015-05-08網(wǎng)絡(luò)優(yōu)先出版
國(guó)家自然科學(xué)基金(61101200)資助課題
*通信作者:張慧 123happy.zh@163.com