預緊對蠕動式被動箝位壓電驅動器性能的影響
2015-09-03 01:52:56曲建俊郭文峰
哈爾濱工業大學學報 2015年7期
關鍵詞:變形
曲建俊,郭文峰
(哈爾濱工業大學機電工程學院,150001哈爾濱)
壓電驅動器在精密加工、精密驅動以及航天工程等領域有廣泛的應用前景.根據激勵方式,壓電驅動器主要分為諧振式和非諧振式.非諧振式壓電驅動器主要工作在幾十至幾百赫茲的聲頻范圍,其特點是運行速度極低,定位精確而且驅動力大[1-2].常見的非諧振壓電驅動器主要有壓電微位移驅動器、慣性沖擊式驅動器和蠕動式壓電驅動器,其中,蠕動式壓電驅動器具有行程大,運行速度低以及定位精確的特點,受到國內外學者的關注.根據箝位體產生箝位力機理的不同,蠕動式壓電驅動器主要分為主動箝位壓電驅動器和被動箝位壓電驅動器[3-4].主動箝位直線壓電驅動器的特點是通電時箝位體對導軌箝位,斷電時對導軌放松[5-6];反之,被動箝位直線壓電驅動器斷電時箝位體對導軌箝位鎖緊,通電時對導軌放松,具有無源自鎖的特點[7-8].
由于兩種類型驅動器箝位力產生機理不同,導致影響驅動力的因素不同.主動箝位驅動器的箝位力由箝位體彈性變形后對導軌箝位產生.箝位體與導軌之間的間隙影響箝位力的大小,間隙越小,箝位力和驅動力越大;反之,箝位力和驅動力越小[9].被動箝位直線壓電驅動器的箝位力在裝配時由箝位體與導軌間的預緊力決定[10-11].理論上,預緊力越大,箝位體對導軌箝位力越大,驅動力越大;反之,驅動力越小.實際上,驅動力的大小還與箝位體通電時對導軌的放松程度有關,這主要取決于預緊力或預緊狀態.目前,許多被動箝位直線壓電驅動器為提高箝位體對導軌的放松程度均采用了位移放大結構,如杠桿放大、三角放大和橢圓放大[12-14].由于放大結構具有一定的壓縮剛度,在預緊力的作用下將產生壓縮變形.即使箝位體對導軌預緊力較大,但箝位體壓電疊堆在額定電壓下的有效輸出位移無法克服壓縮變形,導致箝位體對導軌放松程度較小.因此,研究預緊力或預緊狀態對驅動器性能影響十分必要.
本文基于已研制的蠕動式被動箝位直線壓電驅動器[15],研究其在不同預緊狀態下箝位力的大小以及空載特性和負載特性,分析預緊狀態或預緊力對驅動器性能的影響.探討驅動器在一定的預緊力范圍內性能隨預緊力的變化規律,為預緊力選擇提供依據.
1 驅動器結構
前期研制的壓電驅動器由驅動箝位體、保持箝位體、驅動體和導軌4部分組成[15],整體結構如圖1所示.驅動體為矩形截面薄板結構,壓電疊堆通斷電時,驅動體沿軸向伸縮變形.箝位體分為驅動箝位體和保持箝位體,兩者結構相同,每組采用上下兩個三角放大結構,其結構如圖2所示.裝配時,箝位體對導軌預先施加預緊力.當壓電疊堆通斷電時,實現對導軌的放松和箝位.

圖1 驅動器整體結構俯視圖

圖2 箝位體結構
2 箝位體壓縮變形
2.1 實驗條件
選用哈爾濱芯明天公司型號為PSt 150/5×5/20壓電疊堆,結構尺寸為5 mm×5 mm×18 mm,額定電壓為150 V,標稱位移為 20μm,等效剛度為60 N/μm.驅動器電源的輸出電壓為0~150 V可調.驅動器輸出位移的測量采用基恩士公司生產的LK-G系列,高速、高精確CCD激光位移傳感器,其精確測量位移值為0.1μm.
由于直接測量箝位體與導軌間的箝位力比較困難,本文通過調整預緊狀態的方法來改變箝位體與導軌間的預緊力,通過測量箝位體對導軌的箝位保持力來間接評價箝位力的大小.預緊狀態調整方法如圖2所示,通過改變調整墊片3的厚度,可以改變箝位體與導軌間的預緊狀態,從而實現預緊力的調節.箝位保持力測試方法如圖3所示,驅動器水平固定于實驗臺架上,將拉力計一端與導軌連接,水平且緩慢地拖動另一端,使拉力計數值緩慢地增加,直至導軌開始滑動,數值不再增加為止.
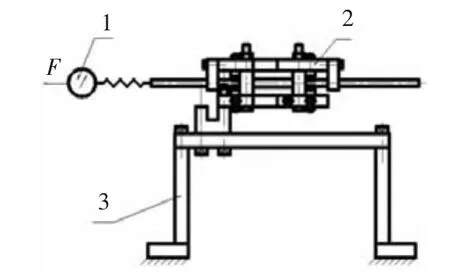
圖3 箝位保持力測試方法
2.2 不同預緊狀態下箝位保持力
在4種不同預緊狀態下測試了驅動箝位體對導軌保持力的大小.實驗方法是,驅動箝位體和保持箝位體同時加載相同電壓時,測量導軌所承受的箝位保持力.由狀態1~狀態4,每種預緊狀態調整墊片厚度相差0.05 mm且為逐次遞減,箝位體對導軌箝位力則逐漸增加.實驗結果如圖4所示.

圖4 不同箝位電壓下導軌箝位力
由圖4可見,預緊狀態1時,箝位體與導軌間的預緊力較小,箝位體壓電疊堆在斷電狀態下,箝位保持力為6 N,箝位電壓為額定電壓150 V時,箝位保持力接近于0 N,該實驗結果表明箝位體在額定電壓下可以對導軌接近完全放松.
在預緊狀態2和預緊狀態3時,箝位體與導軌間的預緊力增加.箝位壓電疊堆在斷電狀態下,箝位體對導軌保持力分別為17.4 N和23.0 N;在額定電壓150 V時,導軌仍具有較大的剩余箝位保持力,分別為11.2 N和19.2 N.該實驗結果表明,隨著預緊力的增加,箝位體在額定電壓下對導軌不能完全放松或放松量變小.產生該實驗結果的原因是:箝位體三角放大結構具有一定的壓縮剛度,在預緊力的作用下產生壓縮變形,當變形量大于箝位體壓電疊堆有效輸出位移時,箝位體不能對導軌完全放松.
當驅動器箝位體處于預緊狀態4時,箝位體與導軌間的預緊力將繼續增加,箝位壓電疊堆在斷電狀態下,箝位保持力為35 N.雖然箝位體對導軌具有較大的箝位保持力,但較大的預緊力導致箝位體三角放大結構產生的壓縮變形量也比較大,隨著箝位電壓的增加,箝位體對導軌放松程度變小,剩余箝位力較大且不穩定.
2.3 箝位體壓縮變形仿真驗證
為驗證上述實驗中箝位體壓縮變形的存在,利用ANSYS有限元軟件仿真的方法分別對箝位體結構進行正向放大倍數和反向放大倍數分析,以此來證明箝位體在預緊力的作用下產生壓縮變形,仿真方法如圖5所示.
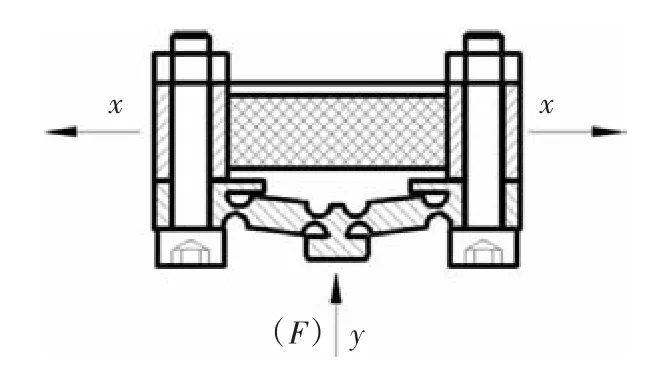
圖5 箝位體壓縮變形仿真方法
由圖5可見,正向放大倍數的仿真方法是在箝位體兩側施加水平位移載荷x,并計算箝位頭垂直位移y,根據垂直位移和水平位移的比值計算正向放大倍數;反向放大倍數仿真分析方法是在箝位頭處沿垂直方向施加力載荷F,模擬箝位體所承受的預緊力.通過仿真計算得到預緊力作用下,箝位頭垂直位移y和水平位移x,根據位移值計算反向放大倍數:

式中:A為箝位體正向(或反向)放大倍數,y為箝位頭垂直方向位移,x為箝位兩端水平位移載荷.
根據上述方法,得仿真計算位移值如表1所示.

表1 正、反向放大倍數仿真位移值
根據表1仿真數據和式(1)計算得正、反向放大倍數分別為2.23倍和6.45倍.可以看出,箝位體反向放大倍數大于正向放大倍數,表明箝位體兩端產生相同水平位移時,箝位頭反向運動垂直位移大于正向運動放大時的垂直位移,即箝位體產生了壓縮變形,證明了2.2節箝位體保持力實驗中產生剩余箝位力的原因.箝位體工作時,箝位壓電疊堆有效輸出位移需要先克服箝位體產生的壓縮變形,然后才能驅動箝位頭產生垂直位移.當預緊力較大時,壓縮變形量較大,箝位壓電疊堆有效輸出位移無法完全克服箝位體壓縮變形量,導致箝位體對導軌不能完全放松,剩余箝位力較大.
分析導致箝位體壓縮變形的主要原因是由于箝位體采用了三角放大結構,結構中直圓柔性鉸鏈為薄弱部分,其剛度較小.在預緊力作用下產生壓縮和偏轉,宏觀上表現為箝位體結構產生壓縮變形.
3 驅動器性能實驗
3.1 不同預緊狀態下空載特性
測試了驅動器在4種不同預緊狀態下的空載特性,當驅動體電壓和箝位體電壓均為額定電壓150 V時,實驗結果如圖6所示.
由圖6可見,隨著預緊力的增加,驅動器動態響應頻率逐漸降低.狀態1的最大響應頻率可達710 Hz(圖中未完全畫出),狀態2和狀態3的最大響應頻率均為230 Hz,狀態4最大響應頻率為190 Hz.每種預緊狀態下存在最大運行速度,隨著預緊力的增加,相應狀態下的最大運行速度及相應的驅動頻率降低.預緊狀態1時,驅動器最大空載運行速度為1.47 mm/s,驅動頻率為130 Hz;預緊狀態2和預緊狀態3的最大空載運行速度分別為 0.43 mm/s 和 0.34 mm/s,驅動頻率分別為70 Hz和110 Hz;預緊狀態4時,驅動器空載最大運行速度為0.16 mm/s,驅動頻率為70 Hz.

圖6 不同預緊狀態下驅動器的空載特性
由2.2節箝位保持力實驗可知,預緊狀態1時,箝位體對導軌剩余箝位力為0,箝位體在額定電壓下可以充分地對導軌放松.因此,驅動器在預緊狀態1條件下工作時,箝位體與導軌間滑動量較小,驅動器運行速度較高.當箝位體對導軌預緊力增加時,箝位體產生壓縮變形,箝位體在額定電壓下,無法對導軌完全放松,存在剩余箝位力.驅動器工作時,驅動箝位體和保持箝位體的剩余箝位力互相干涉,導軌與箝位體之間滑動量較大,驅動器運行速度降低.
預緊狀態一定時,驅動器空載運行速度隨驅動頻率的增加呈現先增加后減少的變化趨勢,高頻驅動時運動速度的變化不穩定.產生上述實驗結果的原因是,低頻工作時,驅動體可以充分地跟隨壓電疊堆伸長和復位,驅動體振幅較大,運行速度隨驅動頻率的增加而提高;當驅動頻率較高時,由于金屬材料具有阻尼,驅動體在壓電疊堆斷電時不能完全復位,驅動體振幅隨驅動頻率的增加而減小,產生振動懸浮現象,驅動器運行速度降低.為驗證驅動體振動懸浮,測試了驅動體在驅動電壓150 V,1 Hz(10個周期)、50 Hz(100個周期)、110 Hz(150個周期)工作條件下,有效輸出位移隨驅動頻率的變化,實驗結果如圖7所示.
由圖7可見,當驅動頻率為1 Hz時,驅動體壓電疊堆斷電時,驅動體可以隨壓電疊堆斷電而充分地復位,其振幅約為15.3μm;當驅動頻率為50 Hz時,驅動體已不能完全復位,驅動體在伸長量大約為8μm處微幅振動,表現為振動懸浮現象,振動幅值也減小,約為2.55μm;當驅動頻率進一步增加時,達到110 Hz,振動懸浮現象更加明顯,振動幅值也減小為1.7μm.因此,隨著驅動頻率增加,驅動體表現為有效輸出位移降低,驅動器運行速度下降.

圖7 驅動箝位體有效輸出位移隨頻率的變化
3.2 不同預緊狀態下負載特性
測試了驅動電壓為150 V時,不同預緊狀態對驅動器負載特性的影響,實驗結果如圖8.不同預緊狀態下驅動器達到最佳負載特性時的驅動頻率不同.預緊力較小(狀態1),驅動器在驅動頻率為110 Hz時負載特性較好,最大運行速度為1.43 mm/s,最大驅動力為 1.5 N.隨著預緊力的增加,在預緊狀態2和預緊狀態3,驅動頻率為50~70 Hz時驅動器負載特性較好,驅動力增至2.1 N,最大運行速度約為 0.3 mm/s.當預緊力繼續增加,在預緊狀態4時,驅動器性能降低,最大驅動力為1.9 N,最大運行速度僅為0.12 mm/s.

圖8 不同預緊狀態下驅動器的負載特性
由2.2節箝位保持力實驗可知,預緊力較小(狀態1)時,箝位體可以對導軌完全放松,導軌運動時與箝位體之間滑動量較小,單步輸出位移較大,導軌運行速度較快,但較小的預緊力導致箝位力和驅動力較小.隨著預緊力的增加(狀態2和狀態3),箝位體三角放大結構產生壓縮變形,箝位體對導軌放松程度變小,導軌運動時與箝位體之間滑動量增加,運行速度降低,但由于預緊力的增加使得驅動力上升.預緊力過大時(狀態4),箝位體三角放大結構的壓縮變形量較大,箝位體對導軌放松程度較小,驅動箝位體和保持箝位體的剩余箝位力干涉嚴重,驅動器性能變差,驅動力變小,運行速度降低.因此,驅動器驅動力的大小與箝位體和導軌間的預緊力相關,合適的預緊力可以使驅動力達到最大值,較大和較小的預緊力均會導致驅動力下降.
3.3 位移時間響應特性
測試了驅動器不同驅動電壓下空載連續運動10步位移的時間響應特性,實驗結果如圖9所示.實驗條件為:箝位體在斷電狀態下雙箝位保持力為7.2 N,額定電壓下雙箝位保持力為0.2 N,該預緊狀態與前文預緊狀態1較為接近;驅動電壓分別為50、100和150 V,驅動頻率為1 Hz.

圖9 驅動器位移時間響應特性
由圖9可見,不同驅動電壓下,驅動器有較為穩定的單步位移,隨著驅動電壓的降低,驅動器單步輸出位移逐漸減小.表明驅動器箝位穩定性較好,工作性能穩定,適用于精密驅動等工作環境.
4 結論
1)箝位體三角放大結構在預緊力的作用下產生壓縮變形,導致箝位體在額定電壓下不能對導軌完全放松.
2)預緊力對驅動器空載特性和負載特性有顯著影響.當預緊力較小時,驅動器運行速度較快,但驅動力較小;當預緊力較大時,箝位體間剩余箝位力互相干涉,驅動器性能降低;合適的預緊力可以使驅動器驅動力達到最大值.
[1]趙淳生.超聲波電機技術與應用[M].北京:科學出版社,2007:1-2.
[2]張兆成.新型壓電尺蠖精密驅動器柔性機構分析與實驗研究[D].哈爾濱:哈爾濱工業大學,2010:82-95.
[3] TIMOTHY P G,JEREMY E F,JULIEN B,et al.Design,modeling,and performance of a high force piezoelectric inchworm motor[C]//Proceedings of SPIE.Sam Diego:The International Society for Optical Engineering,1998:756-767.
[4]JEREMY F,GARY H K,CHEN W C,et al.Design and performance of a high force piezoelectric inchworm motor[J].Proceedings of SPIE-The International Society for Optical Engineering,1999,3668(II):717-723.
[5]LI Jun,ZHU Zhenqi.Design of a linear piezomotor with ultra-high stiffness and nanoprecision[J].IEEE/ASME Trans on Mechatronics,2000,4(5):441-443.
[6]劉建芳.壓電步進精密驅動器理論及實驗研究[D].長春:吉林大學機械學院,2005:32-34.
[7] SULEMAN A,BURNS S,WAECHER D.Design and modeling of an electrostrictive inchworm actuator[J].Mechatronics,2004,14(5):567-586.
[8]JAEHWAN K,LEE J.Self-moving cell linear motor using piezoelectric stack actuators[J].Smart Materials and Structures,2005,14:934-940.
[9]呂超.新型壓電步進直線精密驅動器結構的研究[D].長春:吉林大學機械學院,2006:44-45.
[10]LI J,SEDAGHATI R,DARGAHI J,et al.Design and development of a new piezoelectric linear Inchworm actuator[J].Mechatronics,2005:651-680.
[11]MOON C,LEE S,CHUNG J.K.A new fast inchworm type actuator with the robust I/Q heterodyne interferometer feedback[J].Mechatronics,2006(16):105-110.
[12]KIM J,LEE J.Self-moving cell linear motor using piezoelectric stack actuators[J].Smart Materials and Structures,2005,14:934-940.
[13]ZHANG Sheng,HUANG Weiqing,WANG Yin.Research on the S-type linear piezoelectric motor[C]//2012 Symposium on Piezoelectricity,Acoustic Waves and Device Applications.Shanghai:[s.n.],2012:167-170.
[14]潘雷.多足箝位式壓電直線電機的研究[D].南京:南京航空航天大學,2012:16-30.
[15]曲建俊,郭文峰,王佳男.被動箝位式壓電驅動器:中國,CN 102664554 A[P].2012-09-12.
猜你喜歡
智慧少年·故事叮當(2020年10期)2020-11-06 06:19:00
中華詩詞(2020年1期)2020-09-21 09:24:52
河北理科教學研究(2020年1期)2020-07-24 08:14:34
作文成功之路·小學版(2020年11期)2020-02-01 06:26:58
作文周刊·小學二年級版(2018年29期)2018-11-26 11:20:28
小學生作文(中高年級適用)(2018年5期)2018-06-11 01:22:56
童話世界(2018年14期)2018-05-29 00:48:08
數學小靈通·3-4年級(2017年10期)2017-11-08 08:42:59
中學生數理化·七年級數學人教版(2017年11期)2017-04-23 07:18:00
數學大王·中高年級(2016年12期)2016-12-26 21:37:36