高重合度與低重合度齒輪系統(tǒng)動(dòng)力學(xué)分岔特性對(duì)比分析
2015-09-24 02:32:24李發(fā)家朱如鵬鮑和云葉福民靳廣虎
李發(fā)家,朱如鵬,鮑和云,葉福民,靳廣虎
?
高重合度與低重合度齒輪系統(tǒng)動(dòng)力學(xué)分岔特性對(duì)比分析
李發(fā)家,朱如鵬,鮑和云,葉福民,靳廣虎
(南京航空航天大學(xué) 機(jī)電學(xué)院,江蘇省精密與微細(xì)制造技術(shù)重點(diǎn)實(shí)驗(yàn)室,江蘇 南京,210016)
針對(duì)高重合度齒輪和低重合度齒輪,采用有限元方法計(jì)算其嚙合剛度;建立含齒側(cè)間隙和時(shí)變剛度的齒輪系統(tǒng)的扭轉(zhuǎn)振動(dòng)模型,對(duì)模型嚙合線位移解的分岔特性和跳躍性進(jìn)行研究。研究結(jié)果表明:當(dāng)忽略誤差,僅考慮齒側(cè)間隙的影響時(shí),高重合度齒輪系統(tǒng)嚙合線位移的解,連續(xù)平穩(wěn),不存在跳躍現(xiàn)象,低重合度齒輪系統(tǒng)嚙合線的位移解,多處發(fā)生了跳躍現(xiàn)象;齒頻誤差激勵(lì)在高速區(qū)域(無量綱轉(zhuǎn)速為1.1~2.1區(qū)域)其對(duì)低重合度齒輪的動(dòng)力學(xué)影響要大于對(duì)高重合度齒輪的影響;隨著偏心誤差的增加,嚙合線位移增加,系統(tǒng)的周期穩(wěn)定性逐漸降低,偏心誤差對(duì)普通齒輪的影響比高重合度齒輪的影響要大;在誤差作用下,高重合度齒輪的周期穩(wěn)定性要高于普通齒輪的周期穩(wěn)定性,運(yùn)行更加平穩(wěn),采用高重合度齒輪可以降低齒輪的振動(dòng)和噪聲。
高重合度;齒輪系統(tǒng);動(dòng)力學(xué);分岔;穩(wěn)定性
高重合度(HCR)齒輪傳動(dòng)是重合度大于等于2的齒輪傳動(dòng),同時(shí)嚙合的輪齒對(duì)數(shù)較多,單對(duì)輪齒承受的載荷小,具有承載能力大、傳動(dòng)平穩(wěn)等優(yōu)點(diǎn),因此,高重合度的齒輪傳動(dòng)備受關(guān)注。許多學(xué)者對(duì)齒輪傳動(dòng)的動(dòng)力學(xué)特性進(jìn)行了大量研究。Theodossiades等[1]對(duì)考慮時(shí)變剛度和傳動(dòng)誤差的單自由度齒輪扭轉(zhuǎn)模型的跳躍性和典型龐加萊截面進(jìn)行了研究;Parker等[2]建立了兩自由度齒輪動(dòng)力學(xué)模型,分析了齒輪在不同轉(zhuǎn)動(dòng)頻率下的傳動(dòng)誤差的跳躍性;Saghafi[3]建立了兩自由度齒輪模型,對(duì)系統(tǒng)全局分岔和混沌特性進(jìn)行了研究;Tamminana等[4?6]分析了考慮軸承徑向支承和齒側(cè)間隙對(duì)三自由度直齒輪系統(tǒng)的非線性動(dòng)力學(xué)特性影響;Wang等[7?8]學(xué)者采用有限元法對(duì)高重合度齒輪的齒間載荷分布、齒根彎曲應(yīng)力和接觸應(yīng)力進(jìn)行了計(jì)算,但未對(duì)高重合度齒輪的動(dòng)力學(xué)特性進(jìn)行研究;劉夢 軍[9]建立含間隙的單對(duì)齒輪副非線性動(dòng)力學(xué)模型,對(duì)模型的動(dòng)態(tài)特性進(jìn)行了研究;劉曉寧等[10]研究三自由度齒輪的穩(wěn)定性、分岔類型;趙寧等[11]以重合度最大、體積最小、彎曲強(qiáng)度相等為目標(biāo)對(duì)高重合度齒輪進(jìn)行了優(yōu)化,其研究未涉及動(dòng)力學(xué)內(nèi)容;渠珍珍等[12?13]對(duì)高重合度齒輪的實(shí)現(xiàn)和動(dòng)態(tài)特性進(jìn)行了分析研究,給出了高重合度行星齒輪的動(dòng)態(tài)特性,但未對(duì)高重合度齒輪的分岔跳躍等特性進(jìn)行研究;張祖芳等[14]對(duì)不同重合度的齒輪副運(yùn)動(dòng)進(jìn)行了研究,求解了不同載荷和轉(zhuǎn)速下的時(shí)域圖、相圖和頻率圖,未對(duì)高重合度齒輪的分岔特性進(jìn)行研究;方宗德等[15]對(duì)高重合度齒輪的載荷分配,剛度計(jì)算和動(dòng)態(tài)特性進(jìn)行了計(jì)算和研究,給出大重合度直齒輪副的優(yōu)化設(shè)計(jì)方法,同樣未對(duì)高重合度齒輪系統(tǒng)周期穩(wěn)定性和跳躍性進(jìn)行研究。在此,本文作者采用有限元的方法計(jì)算高重合度齒輪和低重合度齒輪的嚙合剛度,利用傅里葉級(jí)數(shù)擬合高重合度齒輪和低重合度齒輪的嚙合剛度,對(duì)高重合度齒輪和低重合度齒輪的動(dòng)力學(xué)分岔特性及跳躍性進(jìn)行研究。
1 系統(tǒng)模型簡化
僅考慮扭轉(zhuǎn)振動(dòng)的齒輪副扭轉(zhuǎn)動(dòng)力學(xué)模型如圖1所示。圖1中:p和g分別為主動(dòng)齒輪p和從動(dòng)齒輪g所受的扭矩;p和g分別為兩齒輪的旋轉(zhuǎn)自由度;p和g分別為主動(dòng)齒輪和從動(dòng)齒輪的基圓半徑;為齒側(cè)間隙的一半;()為齒輪嚙合的綜合誤差;m為齒輪副的嚙合阻尼;m為齒輪副之間的嚙合剛度。
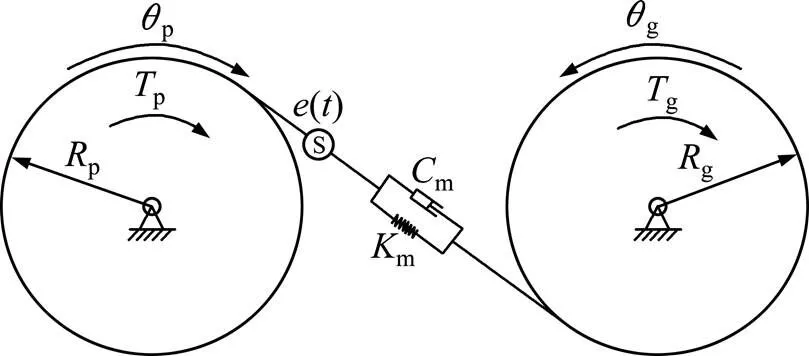
圖1 齒輪副扭轉(zhuǎn)模型
圖1所示的齒輪副的扭轉(zhuǎn)振動(dòng)方程為
式中:p和g分別為主動(dòng)齒輪和從動(dòng)齒輪的轉(zhuǎn)動(dòng)慣量;(,)為齒輪副嚙合線間位移函數(shù)。
1.1 齒輪嚙合時(shí)變剛度計(jì)算和擬合
齒輪重合度是表示同時(shí)嚙合的輪齒對(duì)數(shù)的參數(shù),可通過改變齒輪的基本參數(shù),改變齒輪的重合度。本文采用改變齒頂高系數(shù)方式增加齒輪的重合度,所采用的齒輪參數(shù)和重合度系數(shù)如表1所示。
表1 齒輪傳動(dòng)系統(tǒng)傳動(dòng)齒輪基本參數(shù)
建立表1參數(shù)的齒輪有限元模型,對(duì)其剛度進(jìn)行計(jì)算,得到齒輪嚙合剛度如圖2所示,HCR齒輪和LCR齒輪的平均剛度分別為3.85×108N/m和3.75×108N/m。采用六階Fourier級(jí)數(shù)擬合齒輪嚙合剛度得到齒輪嚙合剛度擬合曲線如圖2所示,擬合方程的各次諧波參數(shù)如表2所示。
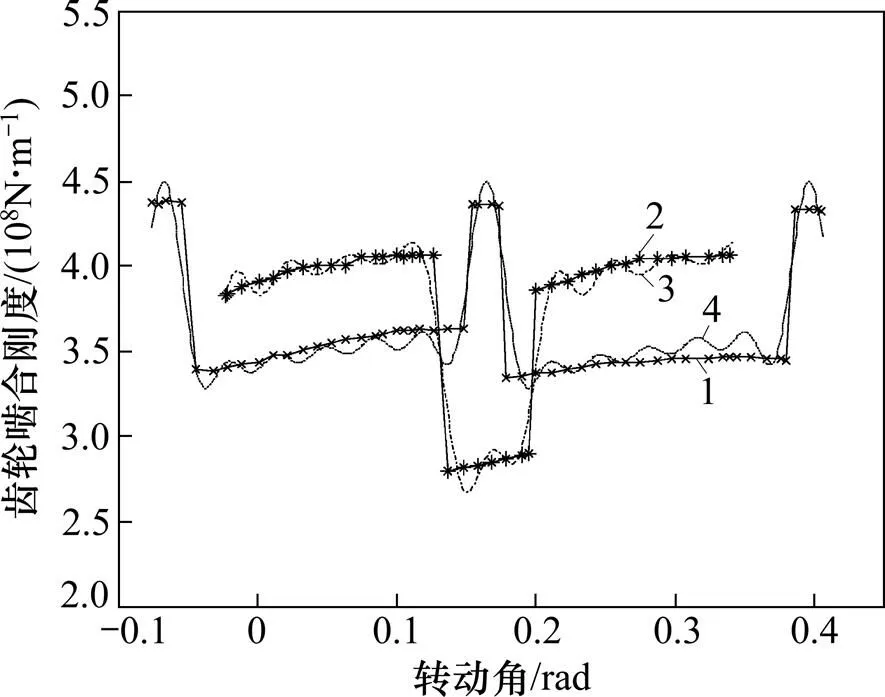
1—HCR齒輪計(jì)算計(jì)算剛度;2—LCR齒輪計(jì)算剛度;3—HCR傅里葉擬合剛度;4—LCR齒輪傅里葉擬合剛度
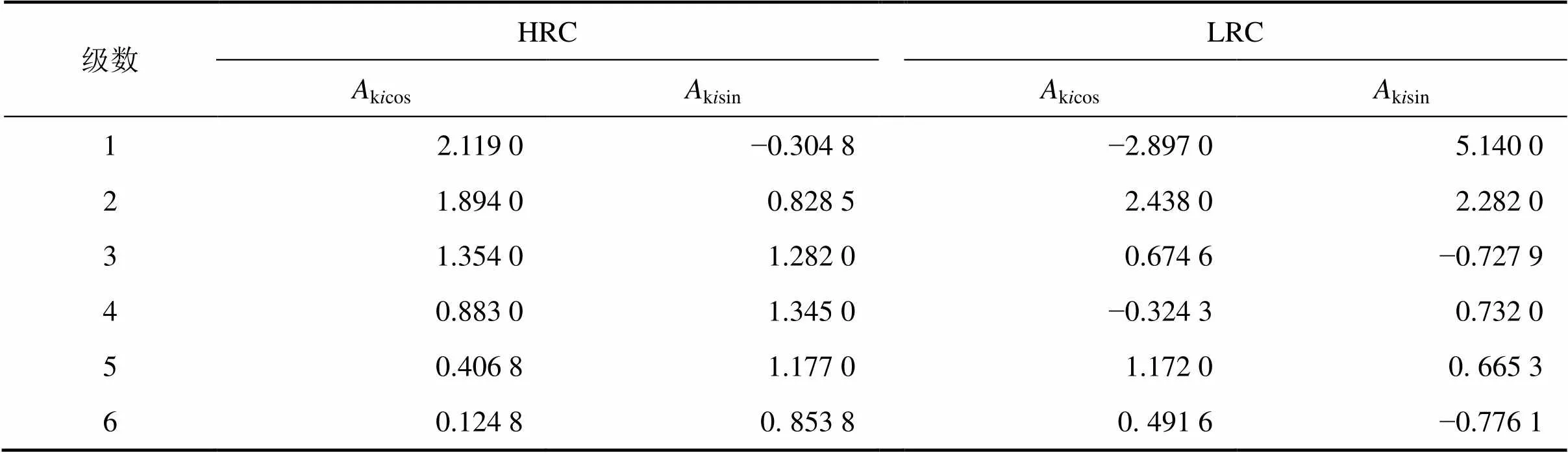
表2 剛度的各次諧波參數(shù)
注:kisin為傅里葉擬合方程中各階正弦項(xiàng)的系數(shù);kicos為傅里葉擬合方程中各階余弦項(xiàng)的系數(shù)。
齒輪副間的嚙合力由構(gòu)件在嚙合線上的等效位移和嚙合剛度確定,模型的嚙合線上等效位移由2部分位移沿嚙合線投影組成,即齒輪各種誤差在嚙合線上的投影和齒輪轉(zhuǎn)動(dòng)位移在嚙合線上的投影。
由誤差引起的在嚙合線上的位移投影為

式中:為齒頻誤差;g和P分別為齒輪g和齒輪p的安裝誤差;g和p分別為齒輪g和齒輪p初相位;g和p分別為齒輪g和齒輪p的轉(zhuǎn)動(dòng)角速度。
定義嚙合線的等效位移為
齒輪系統(tǒng)中不可避免地存在齒側(cè)間隙,間隙為非線性齒輪系統(tǒng)的強(qiáng)非線性因素,齒輪系統(tǒng)嚙合線等效位移的間隙函數(shù)為
1.2 方程的無量綱化
引入式(3)將式(1)簡化為
2 齒輪轉(zhuǎn)速對(duì)無誤差齒輪系統(tǒng)分岔和穩(wěn)定解跳躍特性的影響
采用4階Runge-Kutta求解無量綱式(6),齒輪參數(shù)如表2所示。對(duì)系統(tǒng)的動(dòng)力學(xué)特性進(jìn)行研究,輸入功率200 kW,齒側(cè)間隙初始值取為50 μm,位移標(biāo)稱尺度為10 μm。
由于重合度對(duì)剛度的影響較為顯著,現(xiàn)忽略其他因素及式(2)中()對(duì)系統(tǒng)的影響,即:=0,E=0,p=0,僅考慮由于重合度的剛度變化造成的內(nèi)部激勵(lì)對(duì)齒輪系統(tǒng)的分岔和跳躍特性的影響。
2.1 轉(zhuǎn)速對(duì)分岔特性的影響
齒輪系統(tǒng)的嚙合阻尼比取0.035時(shí),系統(tǒng)的嚙合線位移,HCR齒輪隨無量綱轉(zhuǎn)速變化的分岔特性如圖3所示,LCR齒輪的分岔特性如圖4所示。
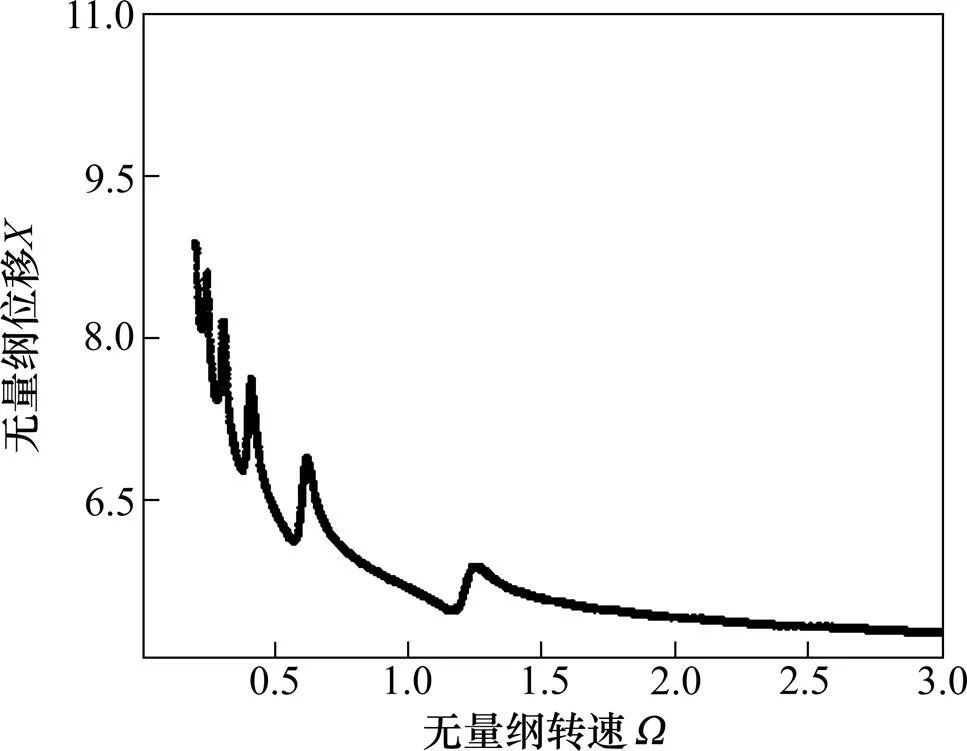
圖3 HCR齒輪嚙合線位移隨轉(zhuǎn)速全局分岔
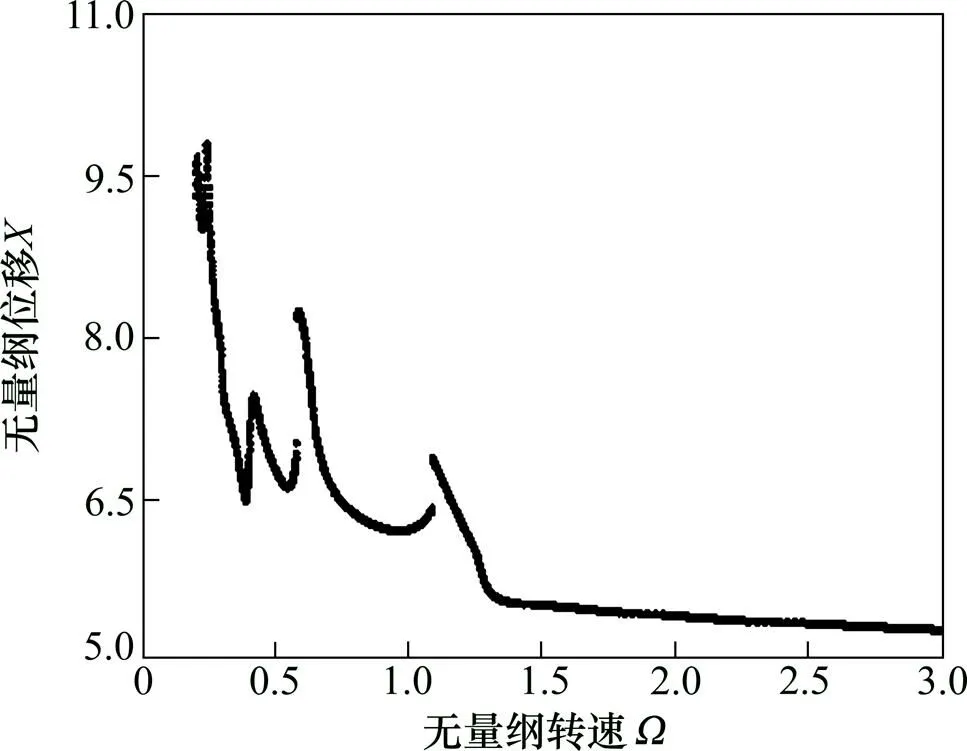
圖4 LCR齒輪嚙合線位移隨轉(zhuǎn)速全局分岔
由圖3和圖4可知:在僅考慮扭轉(zhuǎn)的齒輪系統(tǒng)中剛度對(duì)系統(tǒng)的分岔特性影響較小,系統(tǒng)未發(fā)生明顯的分岔現(xiàn)象;但LCR齒輪的嚙合線的位移發(fā)生跳躍現(xiàn)象,同時(shí)存在2處明顯的跳躍點(diǎn),HCR齒輪嚙合線的位移未發(fā)生跳躍現(xiàn)象,系統(tǒng)的運(yùn)行連續(xù)。由于跳躍和系統(tǒng)運(yùn)行的周期穩(wěn)定相關(guān),因此,需要對(duì)該情況下的運(yùn)行多值性和跳躍現(xiàn)象進(jìn)行研究。
2.2 轉(zhuǎn)速對(duì)穩(wěn)定解跳躍特性的影響
系統(tǒng)在不同的初值條件下可以得到多值解的性質(zhì)稱為解的多值性,隨著系統(tǒng)參數(shù)或激勵(lì)頻率的連續(xù)變化,系統(tǒng)振動(dòng)的位移、速度等參數(shù)發(fā)生突然的變化稱為跳躍現(xiàn)象。HCR和LCR齒輪系統(tǒng)嚙合線的位移跳躍現(xiàn)象如圖5和圖6所示。
圖5 轉(zhuǎn)速對(duì)HCR齒輪嚙合線位移跳躍的影響
圖6 轉(zhuǎn)速對(duì)LCR齒輪嚙合線位移跳躍的影響
由圖5和圖6可知,HCR齒輪嚙合線位移連續(xù),未發(fā)生明顯的跳躍,齒輪的運(yùn)動(dòng)狀態(tài)未發(fā)生明顯改變,與圖3表現(xiàn)的規(guī)律相同;而LCR齒輪的嚙合線位移在轉(zhuǎn)速為0.57~0.58和0.86~1.15處發(fā)生了明顯的振動(dòng)位移跳躍,在=2.42時(shí)系統(tǒng)發(fā)生不明顯的跳躍現(xiàn)象。
由于嚙合線位移振動(dòng)的跳躍造成了系統(tǒng)的運(yùn)動(dòng)的不穩(wěn)定性,在跳躍點(diǎn)時(shí),系統(tǒng)會(huì)因?yàn)檫\(yùn)行參數(shù)的輕微變化,振動(dòng)的強(qiáng)度會(huì)發(fā)生較大改變,使系統(tǒng)運(yùn)動(dòng)狀態(tài)發(fā)生改變,對(duì)齒輪系統(tǒng)的運(yùn)行將造成不利影響。
3 誤差對(duì)齒輪轉(zhuǎn)速分岔特性的影響
誤差對(duì)系統(tǒng)的動(dòng)力學(xué)特性有較大的影響,齒輪的誤差激勵(lì)主要由齒頻誤差激勵(lì)、偏心誤差激勵(lì)組成;齒頻誤差激勵(lì)由基節(jié)誤差、齒形誤差、齒厚誤差等與齒頻相關(guān)的誤差在嚙合線上的投影組成;偏心誤差激勵(lì)為轉(zhuǎn)動(dòng)周期誤差激勵(lì),其主要為各個(gè)齒輪的偏心誤差在嚙合線上的投影;為各齒頻誤差在嚙合線上的投影矢量和;g和P分別為齒輪g和齒輪p的安裝誤差在嚙合線上的投影。
3.1 齒頻誤差對(duì)齒輪分岔特性的影響
取無量綱齒頻誤差激勵(lì)=1,即齒頻誤差激勵(lì)為10 μm,其他誤差g=0,p=0;對(duì)含齒頻誤差激勵(lì)的HCR齒輪和LCR齒輪系統(tǒng)隨著轉(zhuǎn)速的分岔特性進(jìn)行研究,齒輪系統(tǒng)的嚙合阻尼比取0.035,無量綱齒側(cè)間隙為5,即齒側(cè)間隙為50 μm時(shí),HCR和LCR齒輪系統(tǒng)的嚙合線位移,隨無量綱轉(zhuǎn)速變化的分岔特性如圖7和圖8所示。
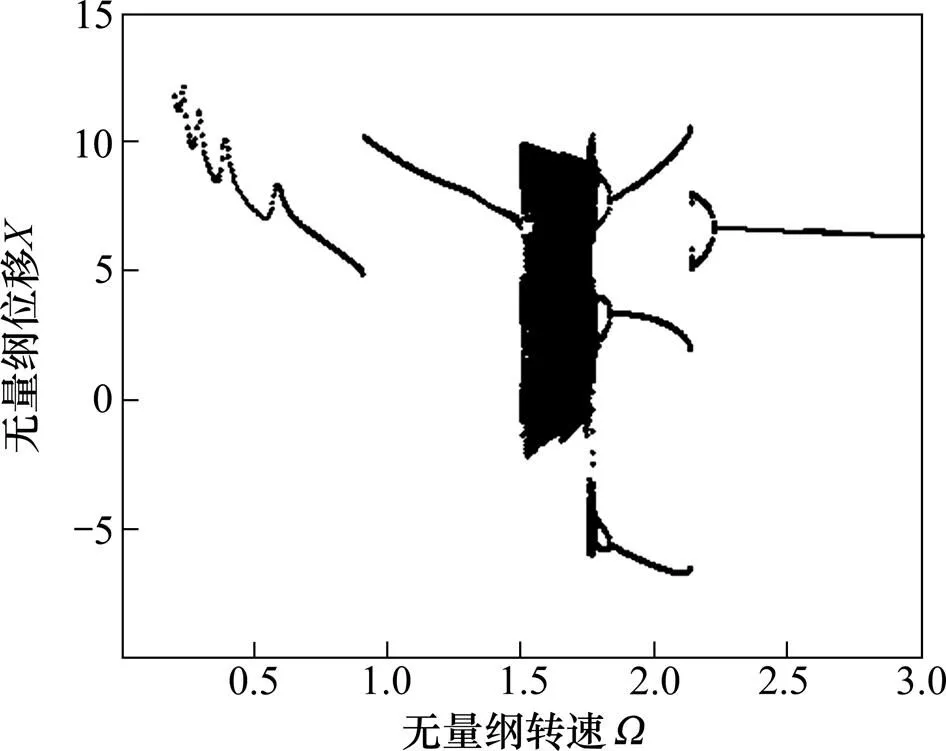
圖7 齒頻誤差對(duì)HCR分岔影響
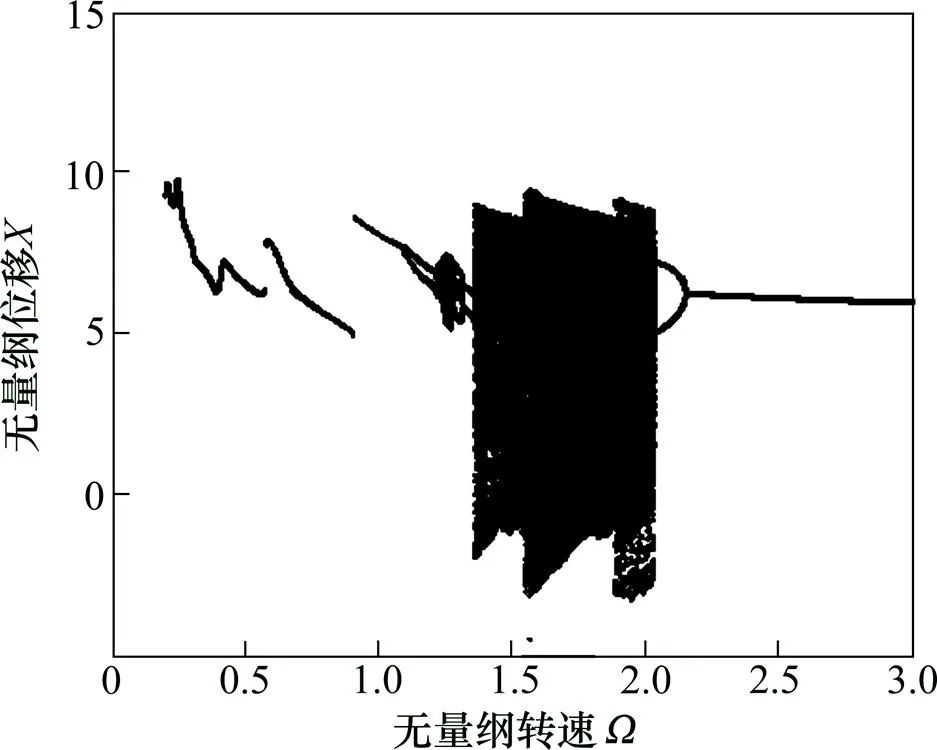
圖8 齒頻誤差對(duì)LCR分岔影響
由圖7和圖8可知:當(dāng)存在齒頻誤差影響時(shí),齒輪系統(tǒng)具有豐富的分岔特性;低轉(zhuǎn)速時(shí),齒頻誤差對(duì)齒輪系統(tǒng)的運(yùn)動(dòng)狀態(tài)影響較小,但是高重合度齒輪在共振區(qū)域發(fā)生了較大的跳躍現(xiàn)象,同時(shí),LCR齒輪在無誤差時(shí)跳躍點(diǎn)的跳躍幅度增加;“激變”是齒輪系統(tǒng)進(jìn)入混沌的主要途徑[16],高轉(zhuǎn)速時(shí)齒頻誤差對(duì)齒輪系統(tǒng)的分岔特性產(chǎn)生了較大的影響,HCR齒輪嚙合線的相對(duì)位移在高轉(zhuǎn)速時(shí),由單周期運(yùn)動(dòng)“激變”進(jìn)入混沌運(yùn)動(dòng),然后通過激變退出混沌運(yùn)動(dòng)狀態(tài),經(jīng)過倒分岔進(jìn)入6周期、3周期、2周期和單周期運(yùn)動(dòng)。LCR齒輪受到的影響較HCR齒輪更突出,系統(tǒng)由單周期運(yùn)動(dòng),經(jīng)過多次倍分岔運(yùn)動(dòng)進(jìn)入長周期運(yùn)動(dòng),經(jīng)過短暫的長周期運(yùn)動(dòng)經(jīng)過倒分岔由2周期運(yùn)動(dòng)“激變”進(jìn)入較大轉(zhuǎn)速范圍的混沌運(yùn)動(dòng),最后系統(tǒng)由混沌運(yùn)動(dòng)狀態(tài)經(jīng)過倒分岔進(jìn)入2周期和單周期運(yùn)動(dòng)。
齒頻誤差激勵(lì)對(duì)LCR齒輪在較大轉(zhuǎn)速范圍內(nèi)動(dòng)力學(xué)特性產(chǎn)生較大影響,齒輪系統(tǒng)混沌區(qū)域的轉(zhuǎn)速范圍較HCR齒輪要大的多,因此HCR齒輪對(duì)轉(zhuǎn)速的周期穩(wěn)定性要優(yōu)于普通齒輪。由于跳躍和混沌運(yùn)動(dòng)加劇齒輪系統(tǒng)的振動(dòng)和噪聲,相對(duì)低重合度齒輪,高重合度齒輪可以有效降低齒輪系統(tǒng)的振動(dòng)和噪聲。
3.2 偏心誤差對(duì)齒輪系統(tǒng)分岔特性影響
將齒頻誤差激勵(lì)設(shè)定為=0,齒側(cè)間隙保持不變,對(duì)HCR齒輪和LCR齒輪隨著偏心誤差變化的分岔特性進(jìn)行研究,齒輪系統(tǒng)的嚙合阻尼比取0.035,齒輪的無量綱安裝誤差g=2和P=2,即安裝誤差為20 μm。圖9和圖10所示為HCR的LCR齒輪系統(tǒng)的嚙合線位移隨無量綱轉(zhuǎn)速變化的分岔特性。
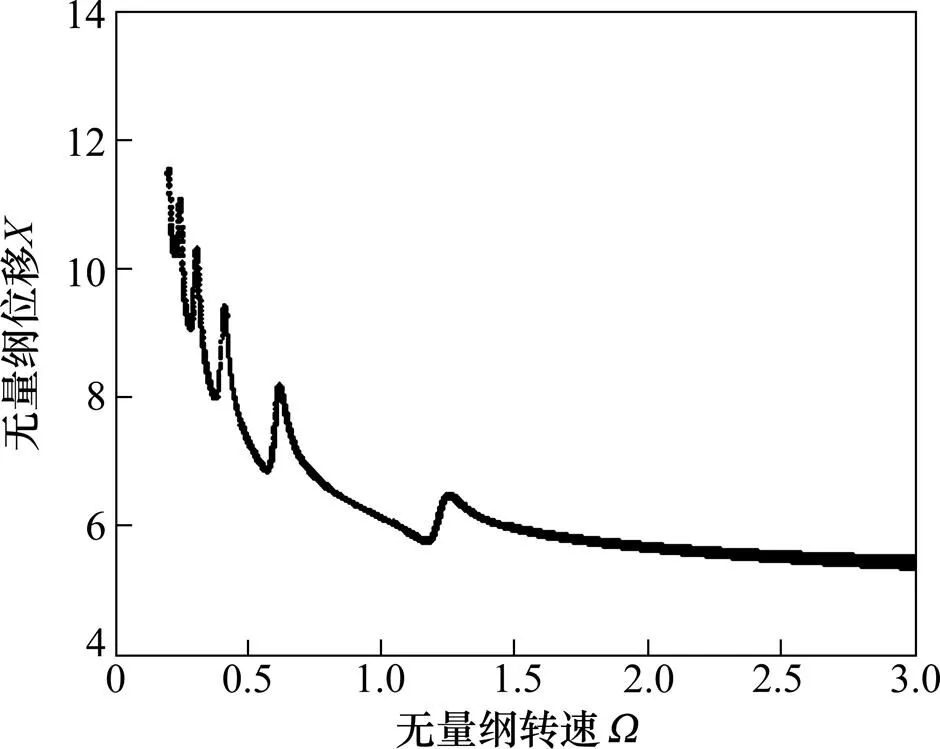
圖9 偏心誤差對(duì)HCR分岔影響
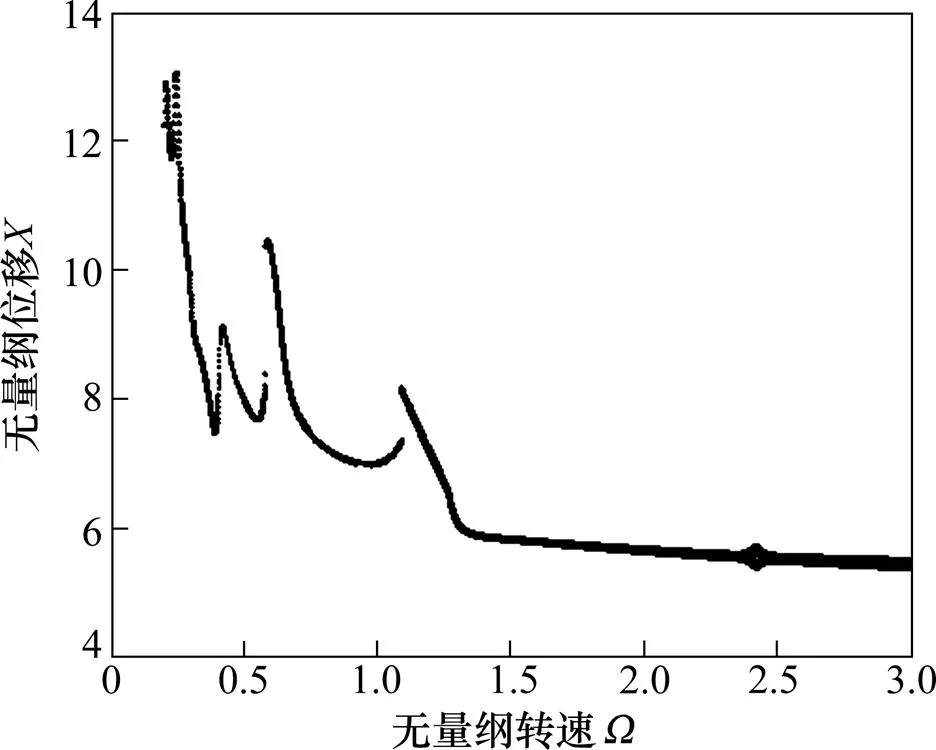
圖10 偏心誤差對(duì)LCR分岔影響
由圖9和圖10可知:當(dāng)齒輪的偏心誤差增加時(shí),齒輪嚙合線位移的幅值變大,HCR齒輪嚙合線位移的解穩(wěn)定域變寬,但其周期運(yùn)動(dòng)規(guī)律未發(fā)生改變,系統(tǒng)的分岔特性沒有發(fā)生本質(zhì)改變。偏心誤差對(duì)LCR齒輪嚙合線位移跳躍影響較大,系統(tǒng)的跳躍幅值增加,加劇齒輪的振動(dòng),在無量綱轉(zhuǎn)速=2.42時(shí),系統(tǒng)發(fā)生分岔現(xiàn)象。
當(dāng)無量綱轉(zhuǎn)速=2.42時(shí),系統(tǒng)的嚙合線無量綱位移隨誤差增加的分岔特性如圖11~14所示。
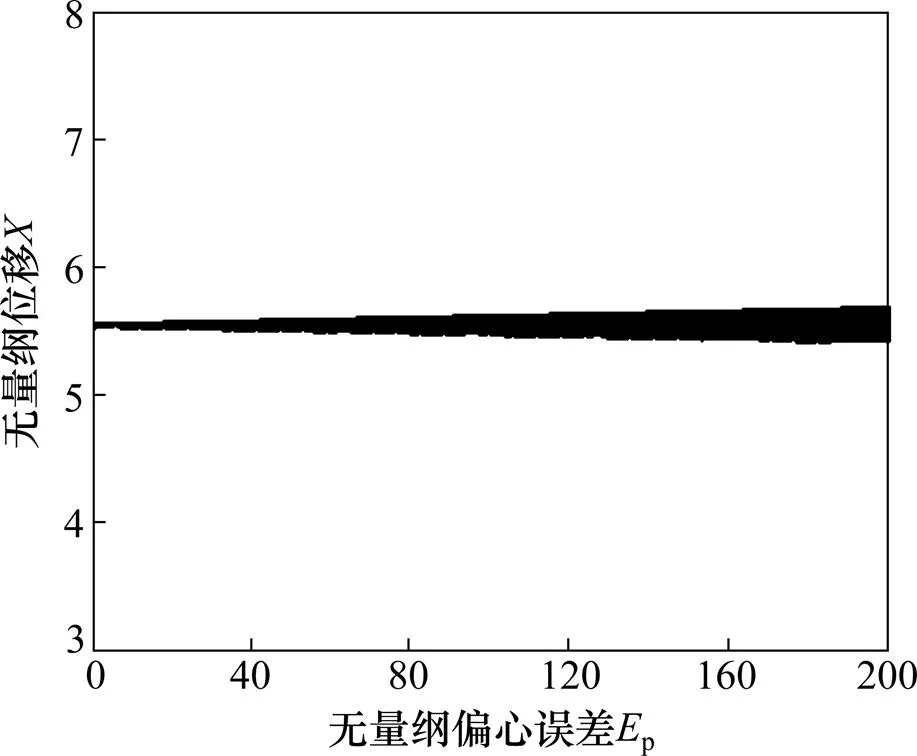
圖11 HCR齒輪隨主動(dòng)齒輪偏心誤差分岔

圖12 LCR齒輪隨主動(dòng)齒輪偏心誤差分岔
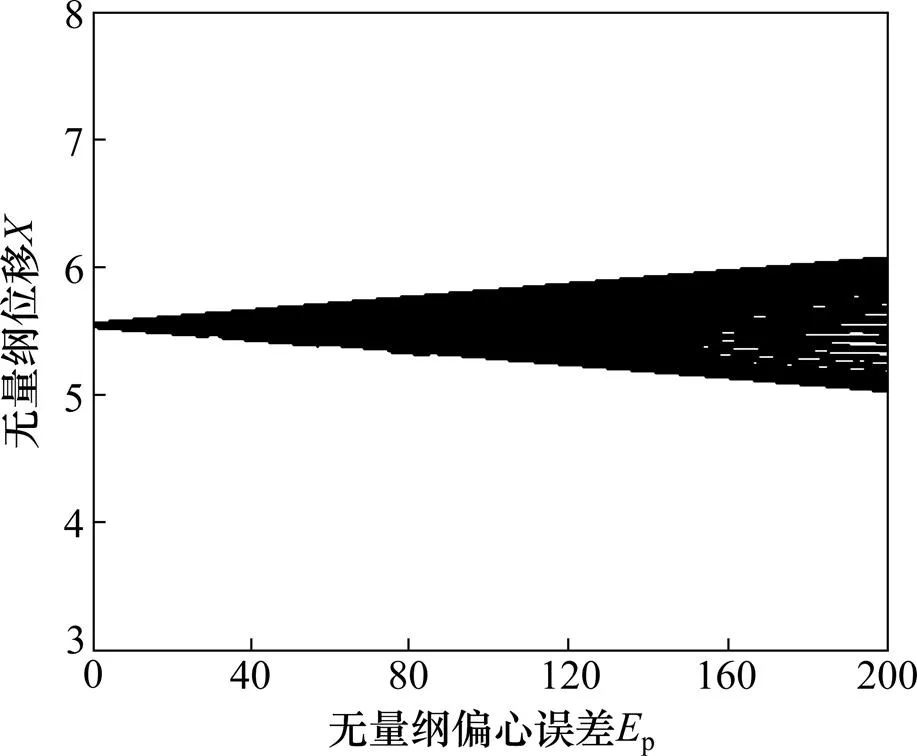
圖13 HCR齒輪隨從動(dòng)齒輪偏心誤差分岔
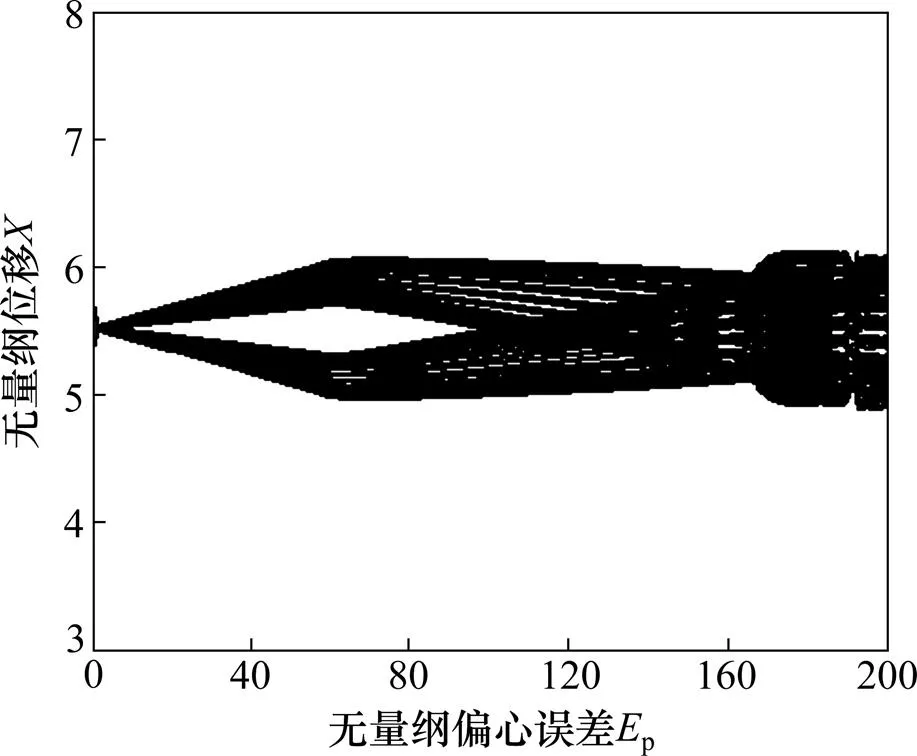
圖14 LCR齒輪隨從動(dòng)齒輪偏心誤差分岔
由圖11~14可知:隨著偏心誤差的增加,系統(tǒng)的周期穩(wěn)定性區(qū)域逐漸變大,齒輪的嚙合線的位移變動(dòng)范圍變大。在該轉(zhuǎn)速下偏心誤差對(duì)LCR齒輪的影響相對(duì)HCR齒輪影響要大;隨著偏心誤差的增加,HCR齒輪的運(yùn)動(dòng)狀態(tài)沒有發(fā)生改變,僅發(fā)生周期擴(kuò)散現(xiàn)象, 其總體作單周期運(yùn)動(dòng),而LCR齒輪的運(yùn)動(dòng)狀態(tài)發(fā)生了較大的變化,其經(jīng)過倒分岔和分岔現(xiàn)象,由兩周期進(jìn)入單周期后再次進(jìn)入兩周期,同時(shí)周期的擴(kuò)散要比HCR齒輪的大,從動(dòng)齒輪較大偏心誤差的影響下系統(tǒng)作復(fù)雜的無規(guī)則運(yùn)行。
4 結(jié)論
1) 當(dāng)忽略誤差影響,僅考慮齒側(cè)間隙的情況下,HCR齒輪系統(tǒng)連續(xù)平穩(wěn),不存在跳躍現(xiàn)象;LCR齒輪的嚙合線的位移在部分轉(zhuǎn)速下發(fā)生了跳躍現(xiàn)象,在固有頻率附近(無量綱轉(zhuǎn)速為0.57~0.58和0.86~1.15處)發(fā)生幅度較大跳躍,因此,HCR齒輪運(yùn)行相對(duì)LCR齒輪運(yùn)行要平穩(wěn)。
2) 齒頻誤差可以增加系統(tǒng)的嚙合線位移的振幅,對(duì)低速齒輪系統(tǒng)的影響較小,其使HCR齒輪在共振區(qū)域發(fā)生了跳躍,LCR齒輪在跳躍點(diǎn)的跳躍幅值增加;其對(duì)高轉(zhuǎn)速齒輪系統(tǒng)產(chǎn)生較大的影響,齒頻誤差激勵(lì)對(duì)LCR齒輪在部分高轉(zhuǎn)速區(qū)域(無量綱轉(zhuǎn)速為1.1~2.1區(qū)域)的動(dòng)力學(xué)影響較為明顯,系統(tǒng)混沌區(qū)域的影響轉(zhuǎn)速范圍要比HCR齒輪的大,HCR齒輪的周期穩(wěn)定性要比LCR齒輪的更強(qiáng)。
3) 隨著偏心誤差的增加,齒輪系統(tǒng)的周期穩(wěn)定性逐漸降低,齒輪的嚙合線的位移幅值變大,偏心誤差對(duì)跳躍點(diǎn)跳躍幅值具有放大作用,偏心誤差對(duì)LCR齒輪的影響要比HCR齒輪的影響大。
[1] Theodossiades S, Natsiavas S. Non-linear dynamics of gear-pair systems with periodic stiffness and backlash[J]. Journal of Sound and Vibration, 2000, 229(2): 287?310.
[2] Parker R G, Vijayakar S M, Imajo T. Non-linear dynamic response of a spur gear pair: Modelling and experimental comparisons[J]. Journal of Sound and Vibration, 2000, 237(3): 435?455.
[3] Saghafi F. Global bifurcation and chaos analysis in nonlinear vibration of spur gear systems[J]. Nonlinear Dynamics, 2014, 75(4): 783?806.
[4] Tamminana V K, Vijayakar S, Kahraman A. A study of the relationship between the dynamic factors and the dynamic transmission error of spur gear pairs[J]. Journal of Mechanical Design, 2007, 129(1): 75?84.
[5] LI Shuting. Effect of addendum on contact strength,bending strength and basic performance parameters of a pair of spur gears[J]. Mechanism and Machine Theory, 2008, 43: 1557?1584.
[6] Kim W, Yoo H H, Chung J T. Dynamic analysis for a pair of spur gears with translational motion due to bearing deformation[J]. Journal of Sound and Vibration, 2010, 329: 440?4421
[7] WANG Jiande, Howard I. Finite element analysis of high contact ratio spur gears in mesh[J]. Journal of Tribology, 2003, 127: 469?483.
[8] Thirumurugan R G. Critical loading points for maximum fillet and contact stresses in normal and high contact ratio spur gears based on load sharing ratio[J]. Mechanics Based Design of Structures and Machines, 2011, 39: 118?141.
[9] 劉夢軍. 單對(duì)齒輪系統(tǒng)間隙非線性動(dòng)力學(xué)研究[D]. 西安: 西北工業(yè)大學(xué)機(jī)電學(xué)院, 2002.
LIU Mengjun. The backlash nonlinear dynamics characters of single pair gear system study[D]. Xi’an: Northwestern Polytechnical University. School of Mechanical Engineering, 2002.
[10] 劉曉寧, 王三民,沈允文. 三自由度齒輪傳動(dòng)系統(tǒng)的非線性振動(dòng)分析[J]. 機(jī)械科學(xué)與技術(shù), 2004, 23(10): 1191?1193.
LIU Xiaoning, WANG Sanmin, SHEN Yunwen. Nonlinear vibrations of 3-dof geared rotor-bearing system[J]. Mechanical Science and Technology, 2004, 23(10): 1191?1193.
[11] 趙寧, 楊杰. 高重合度圓柱齒輪傳動(dòng)多目標(biāo)優(yōu)化設(shè)計(jì)[J]. 機(jī)械傳動(dòng), 2012, 36(7): 43?46.
ZHAO Ning, YANG Jie. Multi-objective optimization design of high contact ratio cylindrical gear drive[J]. Journal of Mechanical Transmission, 2012, 36(7): 43?46.
[12] 渠珍珍, 鮑和云, 朱如鵬. 高重合度行星齒輪系參數(shù)優(yōu)化設(shè)計(jì)[J]. 機(jī)械設(shè)計(jì)與制造, 2011(12): 41?43.
QU Zhenzhen, BAO Heyun, ZHU Rupeng. Optimal design for parameter of high contact ratio planetary gears system[J]. Machinery Design & Manufacture, 2011(12): 41?43.
[13] 渠珍珍.高重合度行星齒輪傳動(dòng)系統(tǒng)設(shè)計(jì)及動(dòng)力學(xué)分析[D]. 南京: 南京航空航天大學(xué)機(jī)電學(xué)院, 2011.
QU Zhenzhen.Design and dynamics analysis of high contact ratio planetary gear transmission[D]. Nanjing: Nanjing University of Aeronautics and Astronautic. School of Mechanical Engineering, 2011.
[14] 張祖芳, 陳衛(wèi)東, 黃康. 重合度對(duì)齒輪副非線性動(dòng)力學(xué)特性影響研究[J]. 組合機(jī)床與自動(dòng)化加工技術(shù), 2014(2): 40?43.
ZHANG Zufang, CHEN Weidong, HUANG Kang. Research on effect of contact ratio on non-linear dynamics of spur gear pair[J]. Modular Machine Tool & Automatic Manufacturing Technique, 2014(2): 40?43.
[15] 方宗德, 蔣孝煜, 宋鏡瀛. 大重合度齒輪的性能研究[J]. 齒輪, 1987, 11(1): 27?32.
FANG Zongde, JIANG Xiaoyu, SONG Jingying. Performance study of high contact ratio gear[J]. Gear, 1987, 11(1): 27?32.
[16] 李同杰, 朱如鵬, 鮑和云, 等. 行星齒輪系扭轉(zhuǎn)非線性振動(dòng)建模與運(yùn)動(dòng)分岔特性研究[J]. 機(jī)械工程學(xué)報(bào), 2011, 47(21): 76?83.
LI Tongjie, Zhu Rupeng, Bao Heyun, at al. Nonlinear torsional vibration modeling and bifurcation characteristic study of a planetary gear train[J]. Journal of Mechanical Engineering, 2011, 47(21): 76?83.
Contrastive analysis of dynamic bifurcation characteristics between high contact ratio and low contact ratio gears system
LI Fajia, ZHU Rupeng, BAO Heyun, YE Fumin, JIN Guanghu
(Jiangsu Key Laboratory of Precision and Micro-Manufacturing Technology, College of Mechanical and Electrical Engineering, Nanjing University of Aeronautics and Astronautics, Nanjing 210016, China)
The nonlinear torsion vibration model of gear system was proposed. Backlashes and time-varying meshing stiffness were taken into consideration. The meshing stiffness of high contact ratio (HCR) and low contact ratio (LCR) gears was obtained by the finite element method. The bifurcation characteristics and jump phenomenon along the line of action were investigated. The results show that when the backlashes and errors are neglected, the displacement along action line of HCR gear system becomes steady and continuous, and without jump phenomenon. However, LCR displacement is broken into two regions. In the range 1.1≤≤2.1, the meshing frequency error produces higher dynamic effect for LCR compared with HCR. With the increase of the eccentricity error and the displacement along the line of action, the system stability is decreased gradually and the eccentricity error has more important effect for LCR than HCR. More importantly, HCR gear system has higher stability and more smooth motion than LCR gears. Finally, HCR gear system can decrease the vibration and noise significantly.
high contact ratio; gear system; dynamics; bifurcation; stability
TH113.1
A
1672?7207(2015)02?0465?07
2014?04?20;
2014?07?15
國家自然科學(xué)基金資助項(xiàng)目(51305196);中央高校基本科研業(yè)務(wù)費(fèi)專項(xiàng)資金資助項(xiàng)目(NZ2014201)(Project (51305196) supported by the National Natural Science Foundation of China; Project (NZ2014201) supported by the Fundamental Research Funds for the Central University)
朱如鵬,教授,博士生導(dǎo)師,從事機(jī)械傳動(dòng)、結(jié)構(gòu)強(qiáng)度、機(jī)械CAD及自動(dòng)化研究;E-mail:rpzhu@nuaa.edu.cn
10.11817/j.issn.1672-7207.2015.02.013
(編輯 趙俊)
猜你喜歡
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
中學(xué)生數(shù)理化·八年級(jí)物理人教版(2022年3期)2022-03-16 05:55:08
當(dāng)代陜西(2021年2期)2021-03-29 07:41:24
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
媽媽寶寶(2017年3期)2017-02-21 01:22:28
中國塑料(2016年3期)2016-06-15 20:30:00
