基于模糊圖像角區處alpha通道的運動參數估計
2015-10-11 02:38:54孔維榮朱大昌李雅瓊
江西理工大學學報 2015年1期
孔維榮, 朱大昌, 李雅瓊
(江西理工大學機電工程學院,江西 贛州341000)
基于模糊圖像角區處alpha通道的運動參數估計
孔維榮, 朱大昌, 李雅瓊
(江西理工大學機電工程學院,江西 贛州341000)
針對由模糊圖像實現運動估計時計算復雜、消耗資源大的問題,提出一種由圖像角區處alpha通道實現運動參數估計的分析方法.運動模糊圖像蘊含著運動信息,而角頂點的運動對參數估計有著直觀的解釋,建立角區處alpha通道運動約束,使運動估計與圖像去模糊分離開,運用Hough投票法提取所需要的信息,實現運動參數估計.分析不同濾波器對估計結果精度的影響.實驗結果表明:該方法是可以由單幅模糊圖像實現一定范圍內的運動估計,縮短運算時間,且估計結果精度較高.
運動估計;運動模糊圖像;alpha通道;角區
當攝像機在曝光時間內與被拍物體間存在相對運動,由此得到的圖像稱為運動模糊圖像,而運動模糊一般被視為一種圖像退化.在視覺檢測運動的方法中,多數運動估計算法都是基于連續清晰圖像序列,也有使用運動模糊圖像,但對運動模糊圖像的運動估計是和復原同時進行的[1].對于運動模糊圖像,估計運動模糊參數有兩個不同用途;其一,為了得到模糊參數的精確估計,在圖像復原中可以用于去模糊[2];其二,推斷場景中物體的運動參數或者自運動,用于計算單幅運動模糊圖像中的光流.由于模糊圖像存在許多未知量,因此在估計運動時需要耗費大量的資源.為實現不經過圖像去模糊直接進行運動估計,同時減少計算量,已有研究人員提出分離運動估計和去模糊的方法[3].
運動估計可以通過分析單幅運動模糊圖像得到,這是由于一幀模糊圖像蘊含目標的運動信息,等價于一個長清晰圖像序列中的目標位移信息[4].文獻[5-6]用帶有模糊圖像的圖像序列估計運動.根據模糊感知運動的視覺機制,戴聲揚等人通過圖像alpha通道梯度信息構建一個適用多種運動形式的約束模型[7].在戴聲揚的基礎上,許廷發等給出基于運動模糊圖像的平移速度測量方法[8],并由此實現通過單幅模糊圖像對車輛速度的實時檢測.運動模糊圖像中并非所有區域對運動估計都是有用的,本文提出通過圖像的角區處alpha通道實現單幅模糊圖像的運動估計,避免對圖像全局運算,減輕計算量,提高估計的實時性.
1 運動約束模型
1.1 模糊圖像運動約束
一般在考慮數字圖像之前,先推測圖像在連續情況下的特性.運動模糊圖像可以由一幅二維清晰圖像和運動模糊核(PSF)函數h卷積得到,即Ib= I*h.運動模糊核h隨著圖像情況可以變得十分復雜,文中只考慮二維線性情況下的運動模糊核,h可以表示為:

其中δ是狄利克雷函數,θ和l分別表示運動方向和尺度,R(θ)(Sl)表示Sl在二維平面內以角度θ旋轉.對單幅運動模糊圖像存在如下約束方程[7]:


1.2 通道運動約束
alpha通道在圖像的摳圖中經常用到,其最大特點便是將任意值的RGB色彩空間轉化到alpha通道的0~1中,這也使其在圖像去模糊和圖像超分辨率中得到廣泛運用.一幅圖像可以用摳圖法將圖像前景F和背景B分開,換言之,彩色圖像可以看成由前景和背景線性組合而得到.

式 (4)中參數α即為圖像線性組合的權值,α∈[0,1].式(4)變形可以得到:

再對式(5)兩邊求導,易得:

從式(6)可以看出,原圖像的邊緣信息被保存在alpha通道內,而且圖像邊緣幅值在alpha通道被標準化到0~1范圍內.
由式(3)結合圖像的前景F與背景B是局部光滑的假定,可以得到[7]:

其中αb=α·h表示alpha通道被模糊核h所模糊,即模糊圖像Ib的alpha通道.對由運動造成的圖像模糊,其圖像alpha通道除了邊緣部分,其它部分的α值大都為0或者1,所以從式(7)易得:▽αb· b∈ 0,±1{ }.對于尺寸很大的圖像,可能需要先分割圖像[9].文中采用文獻[10]中介紹的摳圖算法,該方法對圖像前景運動假設相關性較弱,這樣可以得到更為精確的alpha通道圖像.
2 角點約束
2.1 孔徑問題
從公式(7)可以得出alpha通道運動約束模型是線性約束,若考慮單條模糊邊緣所提供的信息,并不能完全確定所有未知量,存在圖像處理常遇到的孔徑問題[7].而解決孔徑問題的方法十分容易,只需要圖像中不同方向的模糊邊緣.圖1(a)為含有單條邊線的局部模糊圖像的alpha通道圖像,圖1(b)為兩條不同方向邊緣并含有角的情況下的alpha通道圖像.圖1中可以更直觀說明問題,當只有一條模糊邊緣時,運動向量b有多種可能;而圖像含有角時,這時解將是唯一的.
2.2 角點區域alpha通道運動約束
對運動參數的估計可以看成估計位移向量b,而向量b可以等價于曝光時間內圖像角點的運動.在模糊圖像的alpha通道內,αb值的范圍在0~1之間,所以α(p+b/2)-α(p-b/2)=±1.由公式(6)知,alpha通道除了在原圖像模糊邊緣處的值是變化的,其他部分都是常量.因此▽αb大多情況下都為0,所以模糊圖像的alpha通道中大部分區域對運動估計是無用的.
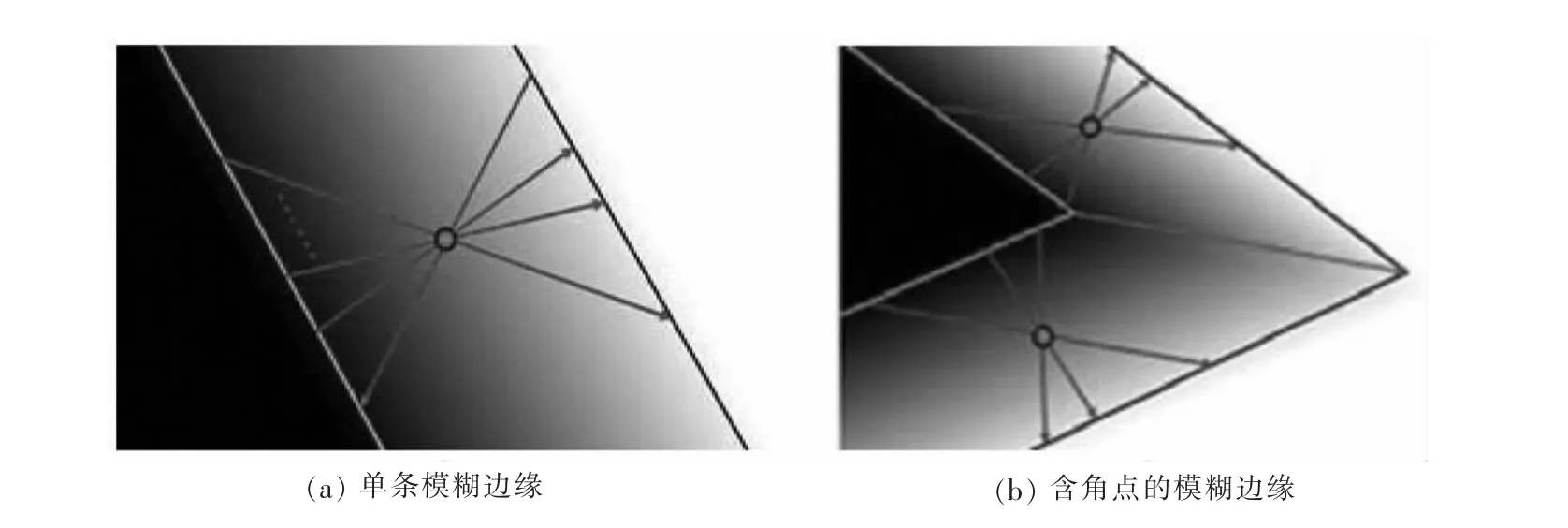
圖1 運動模糊估計中孔徑問題
綜上分析,對整個運動模糊圖像求其alpha通道是沒有必要的,只需要含有角區處的alpha通道,即能實現運動估計,也可以減少計算量.圖2為含有角的alpha通道圖像部分區域,從圖2中可以看出各個變量Δ、▽αb、b之間的空間幾何關系:

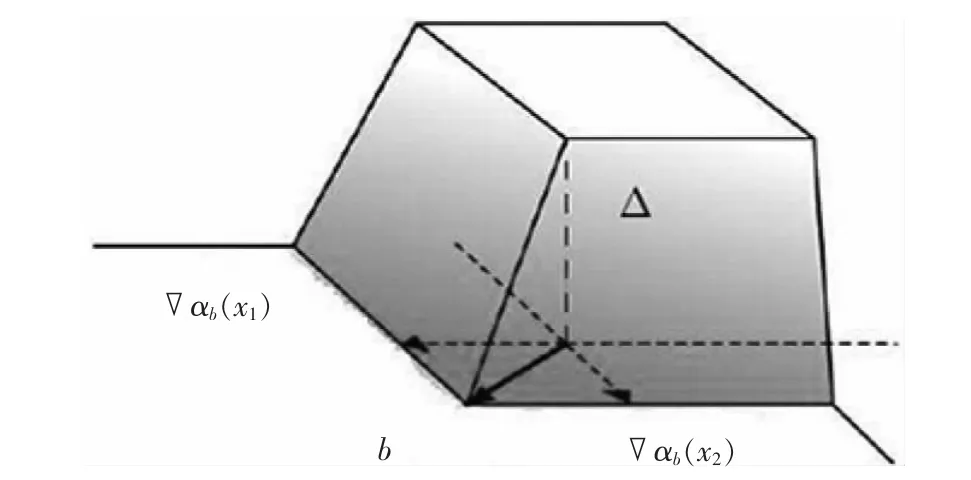
圖2 角點區域處alpha通道內各變量關系
其中Δ=α(p+b/2)-α(p-b/2)為模糊邊緣兩邊的強度差值,Δ=±1是由于單幅模糊圖像缺少必要的時間信息,在運動估計中b和-b都會產生同樣的模糊效果,這也是單幅圖像估計運動的不足之處.
模糊圖像alpha通道的梯度,可以由一階偏分濾波器求得,若d1、d2分別為在x、y方向上的濾波器:

由式(9)知,一階濾波器d1、d2對▽αb的估計精度有著直接影響.文中使用濾波器形如filter(i)= [x1,...,xi],其中i表示濾波器的抽頭數.這種濾波器的優點為求解圖像梯度時不需要目標圖像的先驗信息,并且適用于各種場合的運動估計.
令位移向量b沿梯度▽αb方向上的投影為p(x,y)[11],有:

那么p(x,y)的方向與該點的▽αb一致,向量b的終點在垂直于p(x,y)并穿過其終點的直線上;而由任一點的p(x,y)其可能對應的向量b的終點將構成一條直線.見圖3,其中lx(u,v)表示向量b終點的軌跡.由于p(x,y)知道,那么其直線斜率已知,其頂點坐標是已知的,則直線方程lx(u,v)也是可以得到的.
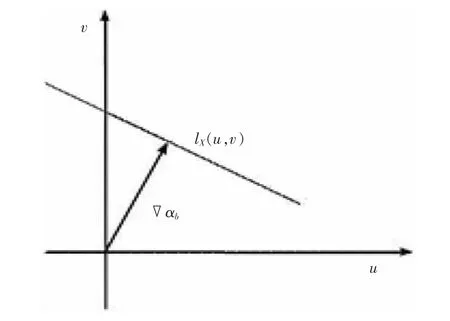
圖3 向量b終點的軌跡
2.3 Hough投票法
角區alpha通道模型具有一個重要特性,即其運動約束為局部約束;換言之,單個像素就可以提供局部運動信息,這不同于以往大都依賴全局特性的運動估計方法.在含角的圖像區域內,x1、x2表示兩個不同的點,如果兩點間線性無關,位移向量b就可以根據px1和px2求得.而當px1和px2線性相關時,向量b將不能被確定,這是由于x1、x2屬于同一邊,具有相同的梯度方向.
對每一個輸入數據p(x,y)而言,其對應的b有多種可能,含有角的運動模糊圖像區域存在多個輸入值,不同的p(xi,yi)將得到不同的直線lx(u,v).通過Hough變換將解轉化到參數空間(u,v),然后總和所有投票;在參數空間內,得票最高的一對點即為運動估計值.
圖4(a)為含有角區處的alpha通道圖像,其中灰色區域為對估計運動有用部分,而黑色區域(α= 1)和白色區域(α=0)則是無用的.為了合理利用灰色區域,只保留α值在[0.02 0.98]范圍內的像素.圖4(b)為在運動參數空間中Hough投票,其中上下兩箭頭表示b和-b,其原因在文中2.2節中已作說明.
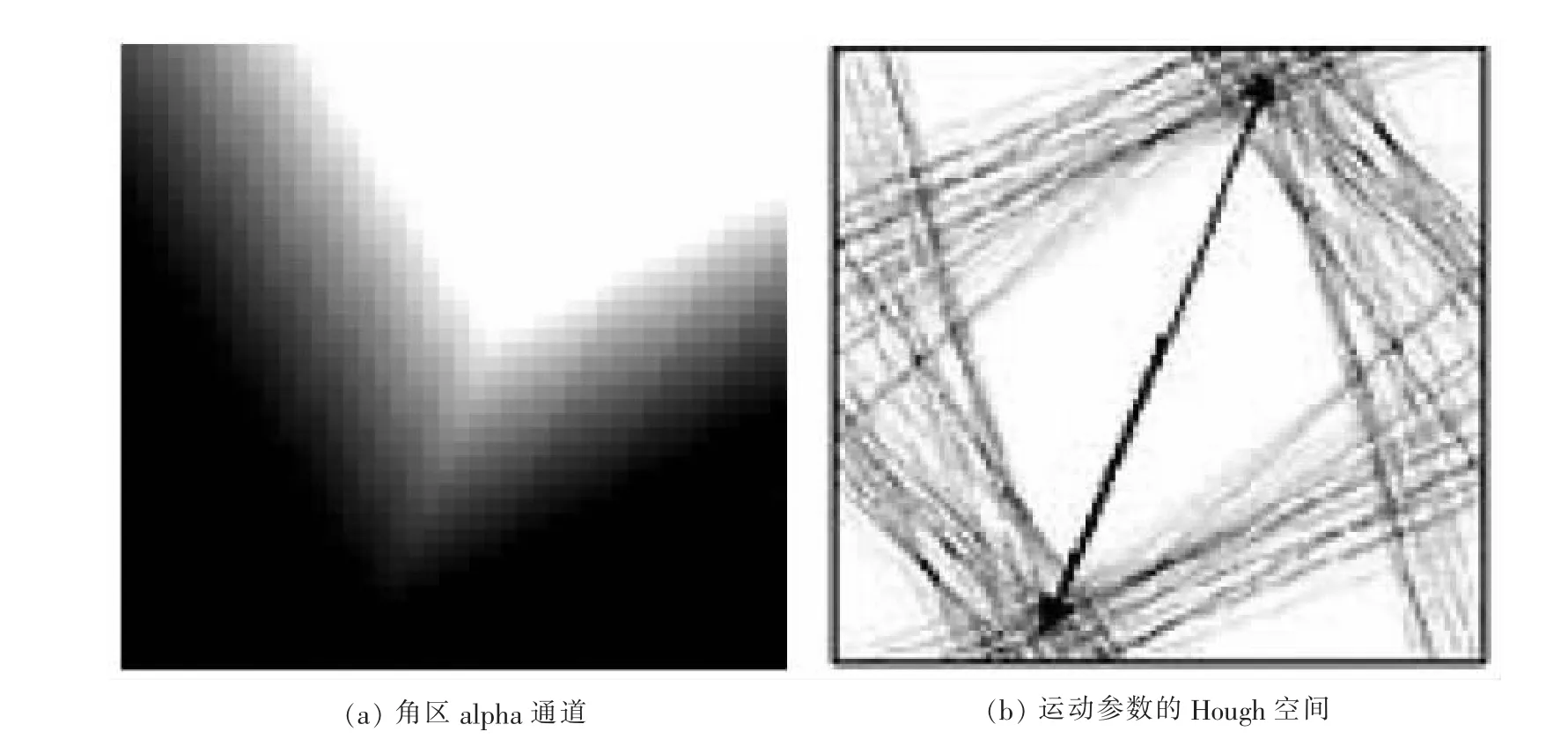
圖4 角區處的運動參數估計
那么本文的主要算法步驟:
1)由文獻[12]中的方法檢測和選取運動模糊圖像的角區Ai(i=1,2,...);
2)由文獻[10]中的方法求得角區Ai的alpha通道,只選取αb∈[0.02 0.98]內的像素點;
3)由公式(9)得到角區Ai的alpha通道的梯度▽αb;
4)對角區Ai內所有像素點按公式(10)求得p (xi,yi),然后得到對應的lx(u,v),再由Hough投票法檢測出直線相交最多的那一點坐標.
3 實驗驗證
運動模糊圖像是由于物體與攝像機之間的相對運動造成的,根據圖像的模糊范圍,分為全局模糊和局部模糊.以往對運動模糊圖像的運動估計方法,大都是以全局模糊為分析對象,而本文提出的方法可以很好地用于局部模糊運動估計.
圖5(a)為合成的運動模糊圖像,從圖中可以看到除了lena頭像區域處是模糊的,其它區域則是清晰的.其中lena頭像是按照(像素)和θ=120°方向運動生成的.為了驗證本文方法的可行性,對運動模糊圖像在matlab 2009b中作仿真實驗.對角點和邊緣的檢測技術相對成熟,用文獻[12]的方法檢測出模糊圖像中的角點,然后以該點為中心選擇適合尺寸的區域(50×50),見圖5(a)所示,這里只取兩處.圖5(b)為所選含角區的alpha通道.圖5(c)為運動參數空間內Hough投票法,由此檢測出運動參數.
由于整個圖像存在多個角點,提供的信息量也不盡相同,可得到不同估計結果,所以可以估計空間變化的運動模糊.使用7抽頭的Samson濾波器[13],得到區域A1的估計結果為(-6.33,10.25),區域A2的估計結果為(5.91,-10.21).一般地,用端點誤差(EPE)來衡量估計結果的精度:

其中(u?,v?)為估計值,(u,v)為實際值.端點誤差的均值用AEPE表示.
由表1可知估計的結果與真實值間相差較小,證明文中提出的方法是正確可行的.需要說明的是,表1中不同模糊程度的圖像中的區域A1、A2在選取時,其位置是有一定改變的.同時用tic/toc命令對運算時間計時,得到在區域A1的運算時間為2.48 s,在區域A2的運算時間為2.25 s,整體運算時間不超過5 s;而用文獻[7]對整個圖像進行全局運算所需時間為53.56 s,由此可見本文所提出的方法極大的縮短了運算時間,同時保證了估計精度.
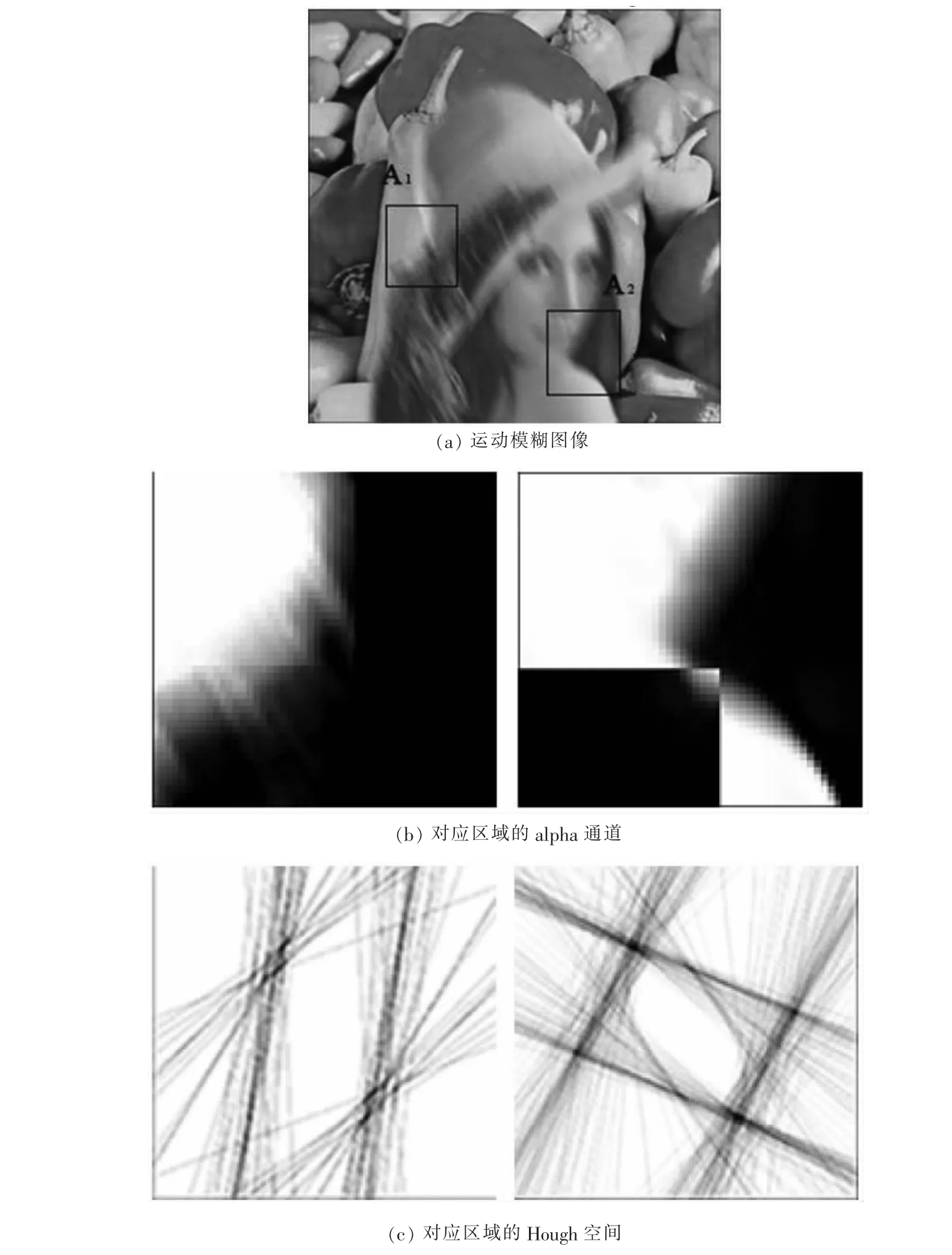
圖5 運動模糊圖像的仿真實驗
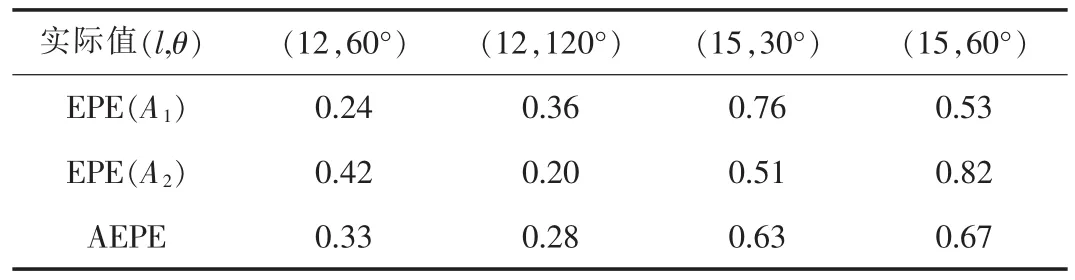
表1 不同運動模糊程度下的EPE
濾波器d1、d2影響▽αb的估計精度,進而影響最后估計結果的精度.選擇三種濾波器[13],即3抽頭的Schuarr濾波器、5抽抽頭的Central濾波器、7抽頭的Sammon濾波器,分別用于運動估計.圖6為在運動方向為60°,不同運動尺度情況下3種濾波器估計精度.從圖6中可以比較得出Sammon濾波器估計精度較高;當運動長度在5~25像素內,估計精度較為穩定,但可以看出曲線兩端估計精度有明顯降低趨勢.這是由于當運動尺度過小時,模糊信息太微弱不易檢測;當運動尺度太大時,模糊程度增大,邊緣特征反而減弱.
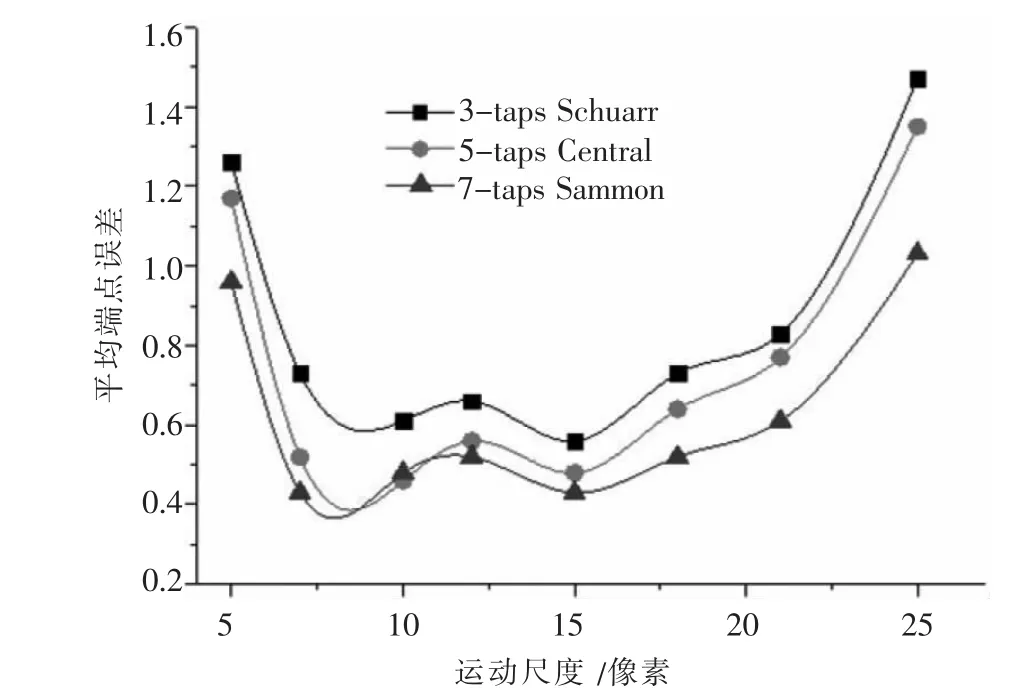
圖6 不同濾波器的估計精度
4 結 語
本文提出一種基于圖像角區處的alpha通道運動約束模型來實現運動估計方法,可以由單幅模糊圖像得到相關運動參數信息,同時提高估計的實時性,實時性對人機互交系統的工作效率的提高十分重要.通過求運動模糊圖像的alpha通道,使運動估計與圖像去模糊分割開;同時alpha通道運動模糊模型是局部線性約束,只需計算圖像角區就可以得到足夠的運動信息,從而減輕計算量.由Hough投票法將alpha通道中像素的梯度信息轉化到運動參數空間,進而估計出物體的運動位移.實驗結果為本文提出的方法提供了有力的依據,也為由模糊圖像估計運動的機器視覺檢測方法提供參考,也對車輛速度實時監測、視覺智能機器人的自主導航等需要提高實時性的系統有一定的現實意義.
[1]Babacan S D,Molina R,Katsaggelos A K.Variational Bayesian blind deconvolution using a total variation prior[J].Image Processing,2009,18:12-26.
[2]Fang X Y,Wu H,Wu Z B,et al.An improved method for robust blur estimation[J].Information Technology Journal,2011,10(9): 1709-1716.
[3]Dai S Y,Yang M,Wu Y,et al.Tracking motion-blurred targets in video[C]//Image Processing,2006 IEEE International Conference on.IEEE,2006:2389-2392.
[4]Schoueri Y,Scaccia M,Rekleitis I.Optical flow from motion blurred color images[C]//Computer and Robot Vision,2009. CRV’09.Canadian Conference on.IEEE,2009:1-7.
[5]He X C,Luo T,Yuk S C,et al.Motion estimation method for blurred videos and application of deblurring with spatially varying blur kernels[C]//Computer Sciences and Convergence Information Technology,2010 5th International Conference on.IEEE,2010: 355-359.
[6]Travis P,Zhang L,Jiang H R.Optical flow in the presence of spatially-varying motion blur[C]//2012 IEEE Conference on Computer Vision and Pattern Recognition.IEEE,2012:1752-1759. [7]Dai S Y,Wu Y.Motion from blur[C]//In Proc.IEEE Conf.on Computer Vision and Pattern,2008:1-8.
[8]Xu T F,Zhao P.Object’s translation speed measurement using motion blur information[J].Measurement,2010,43:1173-1179.
[9]羅會蘭,王威,王慧.一種基于集成學習技術的圖像分割算法的研究[J].江西理工大學學報,2012,33(3):57-61.
[10]Anat L,Alex R A,Dani L.Spectral matting[J].Pattern Analysis and Machine Intelligence,2008,30(10):1699-1712.
[11]Giacomo B,Vincenzo C.Motion blur estimation at corners[C]// InternationalConference on ComputerVision Theory and Applications,2007:296-302.
[12]Rosten E,Drummond T.Machine learning for high-speed corner detection[C]//Computer Vision-ECCV 2006.Springer Berlin Heidelberg,2006:430-443.
[13]Timoner S J,Freeman D M.Multi-image gradient-based algorithms formotion estimation [J].OpticalEngineering,2001,40(9):2003-2016.
Motion parameters estimation based on alpha channel of the corner region in blurred images
KONG Weirong,ZHU Dachang,LI Yaqiong
(School of Mechanical and Electrical Engineering,Jiangxi University of Science and Technology,Ganzhou 341000,China)
For the problems of complex calculation and large consumption of motion estimation from blurred image,a novel method of estimating the motion parameters based on alpha channel of corner region is proposed.The motion blurred images contain motion information,and the corner motion is a significant interpretation for motion parameters estimation.When the motion constraint of alpha channel in the corner region is established,motion estimation and image deblurring can be separated;then take the Hough voting approach to extract the information which we need,to get the motion estimation.Analyze the effects of the different filter on estimation accuracy.The experiment results show that the method is effective within a certain range by using a single blurred image with the operation time shortened and estimation result accuracy.
motion estimation;motion blurred images;alpha channel;corner region
2095-3046(2015)01-0093-06
10.13265/j.cnki.jxlgdxxb.2015.01.016
TP391.4
A
2014-09-05
博士后科學基金資助(2013M541874);江西省博士后擇優項目(2013KY12)
孔維榮(1989- ),男,碩士研究生,主要從事運動檢測等方面的研究,E-mail:kwrong2012@163.com.
朱大昌(1973- ),男,博士后,教授,主要從事微納尺度精密裝備技術、智能控制等方面的研究,E-mail:zdc98998@163.com.
猜你喜歡
今日農業(2021年9期)2021-11-26 07:41:24
發明與創新·小學生(2021年3期)2021-03-25 11:48:49
兒童故事畫報(2019年5期)2019-05-26 14:26:14
中國科技博覽(2016年2期)2016-04-25 20:32:39
小學生導刊(2016年34期)2016-04-11 00:49:44
Coco薇(2016年2期)2016-03-22 02:42:52
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年7期)2015-08-11 15:03:12
小雪花·成長指南(2015年4期)2015-05-19 14:47:56
電測與儀表(2015年5期)2015-04-09 11:30:52