帶鉸彈性開環多體臂架變位姿固有頻率算法
2015-10-13 12:01:47任武吳運新張趙威曾誼暉
中南大學學報(自然科學版) 2015年2期
任武,吳運新,張趙威,曾誼暉
?
帶鉸彈性開環多體臂架變位姿固有頻率算法
任武1, 2,吳運新1, 2,張趙威1, 2,曾誼暉1, 2
(1. 中南大學 高性能復雜制造國家重點實驗室,湖南 長沙,410083;2. 中南大學 機電工程學院,湖南 長沙,410083)
針對多體泵車臂架作業中頻繁位姿變換固有頻率不易求解的問題,采用多體傳遞矩陣法建立四節臂架動力學模型,模型分為A和B 2個子系統,子系統A為第1節臂、支座油缸連接,子系統B為后3節臂、油缸連接。加入液壓驅動油缸兩端鉸彈性的影響,進行整體模型封裝分析4種常用位姿的固有頻率,并在已有臂架實驗臺上進行實驗驗證。研究結果表明:采用多體傳遞矩陣法求解變位姿多體系統臂架固有頻率避免了傳統方法中重新設定計算的步驟,4種位姿加入鉸彈性的固有頻率均比理想鉸降低且更接近實測值,為此類機械的變位姿頻率計算和整車實時振動控制提供參考。
多體;臂架;鉸彈性;傳遞矩陣法;振動;固有頻率
泵車臂架是典型的多體開環機械臂,目前最長的臂架已經到達101 m。大范圍運動高柔度特征使其在低頻工作時受到較大的振動,同時,臂架位姿的頻繁變換導致固有頻率不斷變化,給設計分析帶來不便。現有研究中,Cazzulani等[1]研究了泵車臂架加末端質量塊的臂架振動固有頻率變化。Liu等[2]建立了大范圍運動剛柔雙臂理想鉸非線性運動方程,分析了臂的振動特性。劉杰等[3]分析了某泵車臂架多剛體模型并對多柔體臂架末端位移進行了探討。王斌華等[4]研究了脈動和常速流混凝土對臂架振動頻率的影響。賀尚紅等[5?7]建立適用于機電液耦合系統頻域的通用傳遞矩陣,提供一種更方便的仿真方法。Li等[8?9]建立了液壓缸驅動柔性臂動力學模型并進行末端位移控制仿真。芮筱亭等[10]提出離散傳遞矩陣法并應用于自行火炮等多體武器系統動力學工程實例分析和頻率求解。Flores[11]分析了旋轉鉸碰撞摩擦原理,建立了曲柄滑塊運動仿真模型。白爭鋒等[12?14]研究了連桿機構運動副碰撞動力學特性,并進行了實驗研究。Dupac等[15]分析了平面柔體連桿機構的彈性影響,指出彈性影響在此類機構動力學研究中不應忽視。大范圍變姿態機械臂如混凝土泵車臂架的研究,通常將鉸當成理想鉸來分析,忽略了鉸彈性碰撞的影響。本文作者以多體開環臂架為研究對象,利用傳遞矩陣法建立其多體模型和鉸彈性模型,快速計算出其位姿變換時的固有頻率,并通過臂架實驗臺驗證模型的正確性和計算方法的合理性。
1 鉸彈性碰撞理論和參數選取
Lankarani-Nikravesh模型是改進的Hertz接觸模型[11],如式(1)所示:
其中:
F為接觸碰撞力;為接觸物體的剛度系數,可根據Goldsmith碰撞實驗得出;為穿透深度;為接觸碰撞阻尼系數;為接觸碰撞相對速度;σ為銷軸鉸接系數;和分別為材料泊松比和彈性模量,根據文獻[13],取1.5;R為銷軸半徑,R(=1,2,3,4)分別為四節臂銷的半徑;c為恢復系數,取0.9;為撞擊點的初始相對速度。,,R和R取值見表1。
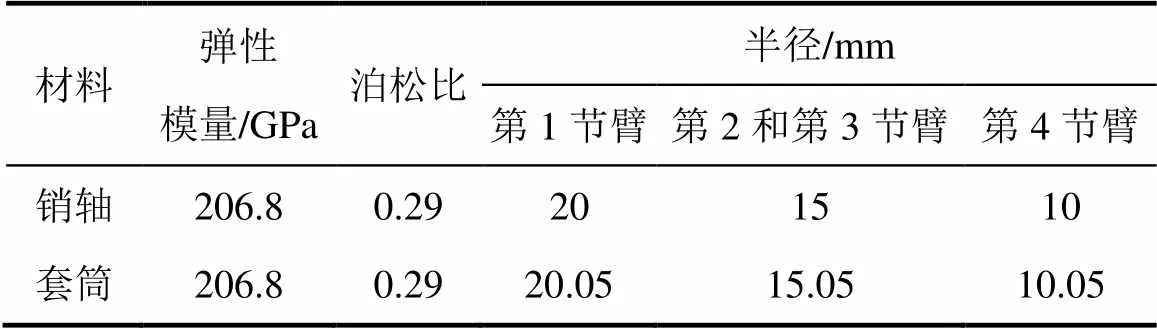
表1 銷軸套筒材料與結構參數
2 帶鉸彈性臂架動力學模型
2.1 數學模型
多體開環臂架從根部算起主要由臂、連桿以及液壓驅動油缸組成,幾節臂架由多個六連桿串聯而成,根據連接類型將臂架系統劃分成2種子結構以提高建模效率如圖1所示。
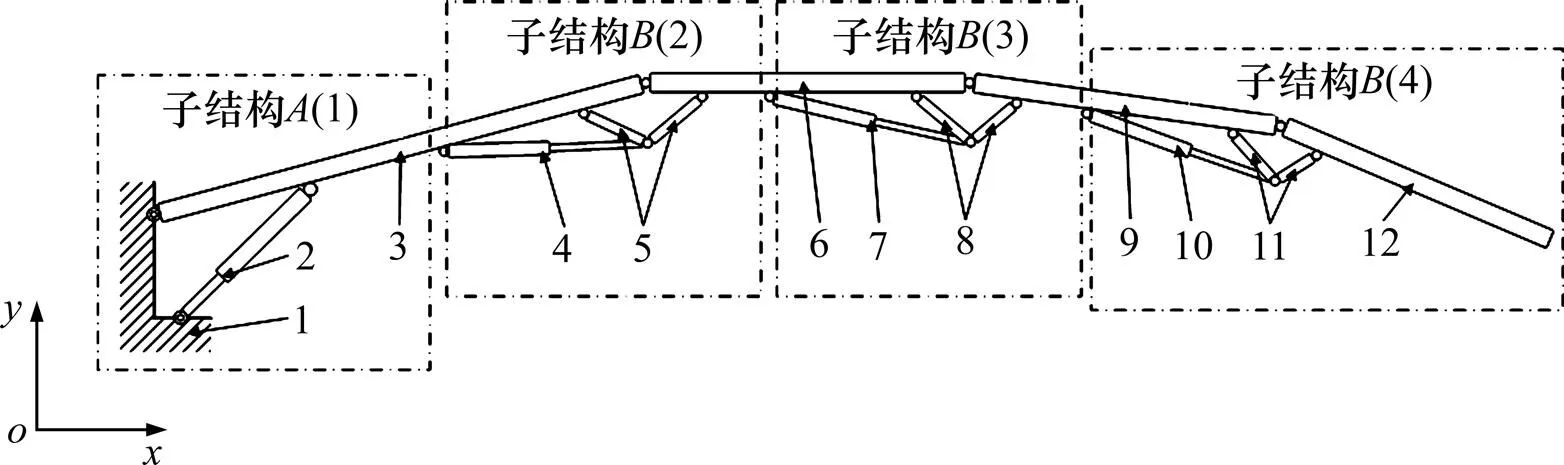
1—支座;2,4,7,10—液壓缸;3,6,9,12—臂架;5,8,11—連桿
臂架的2種子結構分別是體元件和鉸元件,這些元件傳遞矩陣依照連接關系進行初步組裝得到各自子結構傳遞方程和傳遞矩陣,然后將2種子結構再封裝成總傳遞方程和總傳遞矩陣,最后利用邊界條件得到該系統的動力學特性。模型中臂架等效為彈性梁元件,連桿、油缸及活塞桿等效為剛體元件,旋轉鉸等效為彈簧阻尼系統,其剛度系數按式(2)計算,液壓油等效為一定剛度的彈簧元件。忽略臂架左右扭轉的影響,四節臂簡化為歐拉?伯努利梁,假定臂架低速運動以忽略離心加速度和科氏加速度的影響,定義各連接點狀態矢量為
在模態坐標系下,式(5)中為線位移;為角位移;M為內力矩;Q和Q為內力。
2.2 子結構的傳遞矩陣
臂架結構劃分成子結構和子結構,其中結構包括第1節臂、支座、驅動油缸以及液壓油缸兩端連接旋轉鉸;結構又分為3個亞結構,包括后3節臂結構和相應液壓缸兩端旋轉鉸,如圖2和圖3所示。

圖2 子結構A連接

圖3 子結構B連接
子結構中定義0為其輸入端,8為其輸出端,1,3和5為剛體元件,2,4和6為平面彈簧連接彈性單元,其中6為彈性鉸,7為等截面歐拉?伯努利梁元件,根據傳遞矩陣法得到各元件的傳遞矩陣,將0~8元件結合可得到子結構的傳遞方程:
1,7和6連接處的位移和受力關系如下:
由式(6)和式(7)可得:
轉化矩陣1~3分別為:

子結構的傳遞方程如下:
子結構的傳遞矩陣以及狀態矢量為:

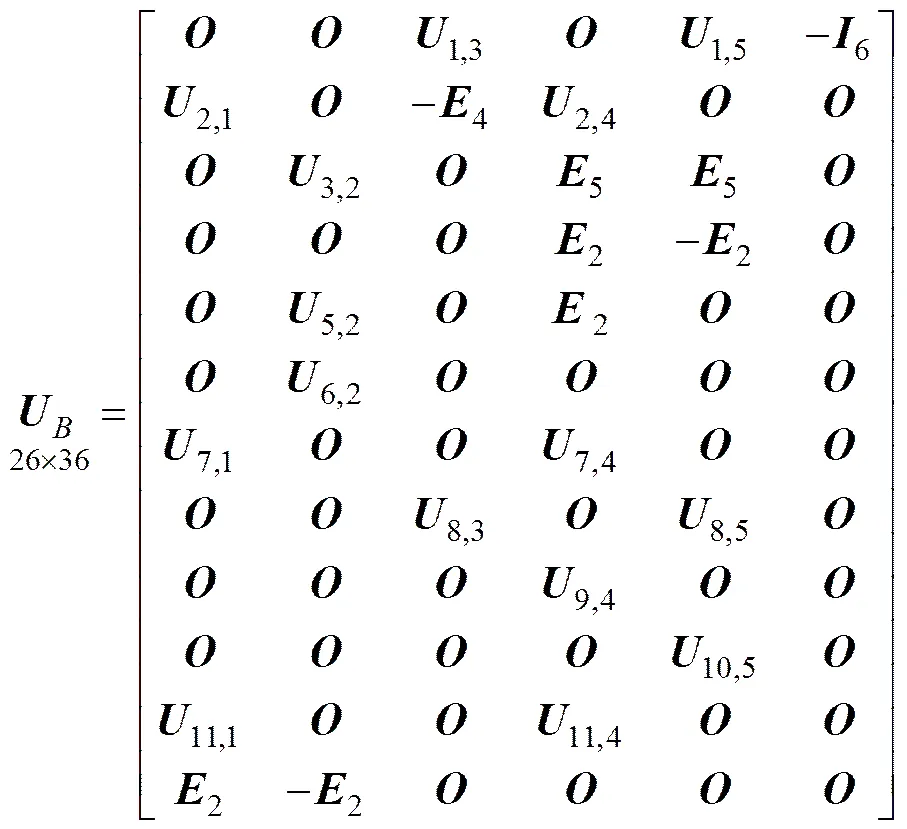
子結構中0為其輸入端,12為其輸出端,2,3,6,8,10和11為剛體元件,5,7和9元件為平面彈簧鉸連接元件,1和4元件為等截面歐拉?伯努利梁元件,推導方式與結構的類似,根據各元件之間的連接關系得到子結構的傳遞矩陣及其狀態矢量如下:
2.3 總傳遞矩陣
混凝土泵車臂架總裝系統由子結構和子結構中3個部分串聯而成,其中子結構的7,8與子結構的0,1和0,5形成連接點,子結構B的4,12與其串聯的子結構B+1的0,1和0,5形成新的連接點,根據連接點的位移和受力關系可以得到臂架總傳遞方程:
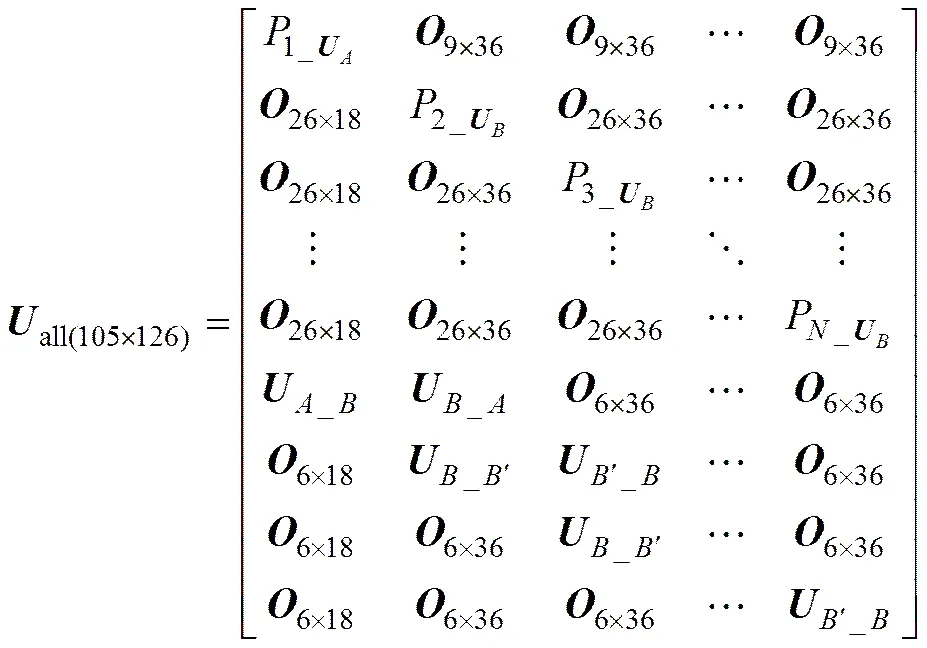


其中:all臂架系統總傳遞矩陣;all為總特征矢量。
由邊界條件可得結構和邊界狀態矢量,其中子結構邊界狀態矢量為
非末端子結構(編號記為)狀態矢量為
末端子結構(編號記為)狀態矢量如式(19)所示,由邊界條件可將all中的零元素(共計21項)去掉剩下的狀態矢量記為,同時在all中去除all零元素對應的列,記為。當=4時,所得的中含有105項未知元素,為105階方陣,得到特征方程如式(20)所示。
由于泵車臂架實際中需要頻繁位姿變換,為計算其任意姿態的固有頻率,需重新修改總傳遞矩陣,模型中傳遞矩陣的連接方式不變,僅元件的角度改變。各元件的變化角度由臂架的位姿角通過幾何解析獲得或者預設,然后由式(21)將傳遞矩陣進行轉角坐標變換,計算新姿態下的傳遞矩陣以及傳遞方程,從而得到臂架任意姿態的任意階固有頻率f(1,2,3,4) (=1,2,…),其中θ為各臂架相對水平面的角度。
式中:H和為坐標轉換矩陣;U為初狀態元件傳遞矩陣;為期望姿態下的元件傳遞矩陣。
在Matlab中編寫相應的程序求解,泵車臂架為四節臂,總長13 m,結構參數見表2。預置有解區間用二分法逼近計算滿足式(20), 容差范圍(容差為?1×10?7~1×10?7)的采用Newmark-積分法得到,仿真時間28 s,在此時間內完成從水平工況到樓頂工況的變換,步長0.03 s,得到臂架常用工況下的固有頻率。
3 臂架多位姿固有頻率仿真分析和實驗
3.1 位姿選取
根據臂架經常用的姿態,仿真和實驗中選定如圖4所示的4種姿態進行計算。
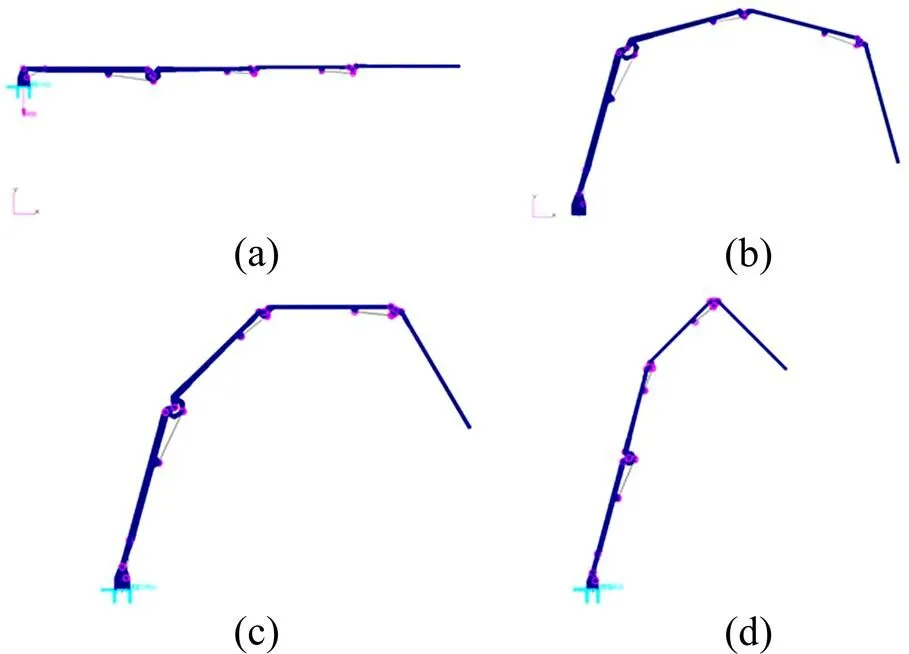
(a) 水平工況;(b) 地基工況;(c) 面墻工況;(d) 樓頂工況
仿真中首先研究不考慮旋轉鉸彈性影響的固有頻率,然后加上液壓缸和臂連接的旋轉鉸彈性影響,由于臂架一般是低頻影響較大,因此,主要考察第一階固有頻率的變化,分別計算2種不同模型相應姿態的第1階固有頻率。
3.2 實驗研究
為了驗證多體系統傳遞矩陣法建模的正確性,利用現有的總長13 m四節臂臂架實驗臺、Dewesoft信號采集儀、三軸加速度傳感器進行實驗研究,臂架材料為Q345B,主要結構參數見表2。

表2 臂架模型主要參數
3.3 仿真和實驗結果分析
根據仿真分析和實驗結果計算出2種模型幾種特殊位姿的第1階固有頻率見表3。

表3 固有頻率數值計算結果和實測值對比
由表3可見:4種位姿對比中考慮鉸彈性影響和不考慮鉸彈性影響模型的位姿中都是水平姿態的振動頻率最低,說明水平工況是柔性影響最大的工況,也是工作最惡劣的工況;樓頂工況振動頻率最高;面墻和地基工況介于兩者之間;各個位姿中理想鉸模型的固有頻率相對于加鉸彈性影響模型的固有頻率都偏大,說明鉸彈性影響的加入減小了機構的固有頻率,使得臂架體現出更大的柔性,同時,考慮鉸彈性影響的模型的頻率更接近于實測值,證明了文中計算鉸彈性影響的必要性和正確性。
4 結論
1) 利用傳遞矩陣法建立臂架整體模型求解系統固有頻率,實現了理想鉸和帶鉸彈性的多體開環變位姿臂架批量頻率仿真,對需要不斷變換位姿的結構非常適用,避免了傳統方法重新設定參數計算的步驟,適合工程應用。
2) 帶鉸彈性模型的仿真值更接近測試值,特別是水平工況更能體現臂架的柔性影響,為此類機構頻率計算提供幫助。
[1] Cazzulani G, Resta F, Ripamonti F. A Feedback and feedforward vibration control for a concrete placing boom[J]. Journal of Vibration and Acoustics, 2011, 133(5): 1002?1008.
[2] LIU Zhuyong, HONG Jiazhen, LIU Jinyang. Complete geometric nonlinear formulation for rigid-flexible coupling dynamics[J]. Journal of Central South University of Technology, 2009, 16(1): 119?124.
[3] 劉杰, 戴麗, 趙麗娟, 等. 混凝土泵車臂架柔性多體動力學建模與仿真[J]. 機械工程學報, 2007(11): 131?135.
LIU Jie, DAI Li, ZHAO Lijuan, et al. Modeling and simulation of flexible multi-body dynamics of concrete pump truck arm[J]. Chinese Journal of Mechanical Engineering, 2007, 43(11): 131?135.
[4] 王斌華, 呂彭民. 混凝土泵車臂架系統振動機理的研究[J]. 振動與沖擊, 2011, 30(9): 259?263.
WANG Binhua, Lv Pengmin. Vibration mechanism of arm system of concrete pump truck[J]. Journal of Vibration and Shock, 2011, 30(9): 259?263.
[5] 賀尚紅, 段吉安. 復雜軸系扭振動力學建模網絡法[J]. 中國有色金屬學報, 2002, 12(2): 388?392.
HE Shanghong, Duan Ji'an. Network method for dynamic modeling of complex shafting torsional vibration system[J]. The Chinese Journal of Nonferrous Metals, 2002, 12(2): 388?392.
[6] 賀尚紅, 段吉安, 鐘掘. 機電系統通用建模矩陣法[J]. 中南工業大學學報(自然科學版), 2002, 33(5): 517?521.
HE Shanghong, Duan Ji'an, Zhong Jue. Universal matrix method for modeling electromechanical systems[J]. Journal of Central South University of Technology (Natural Science), 2002, 33(5): 517?521.
[7] 賀尚紅, 楊昀梓. 基于神經網絡的混凝土泵車發動機萬有特性建模與工況優化[J]. 中南大學學報(自然科學版), 2010, 41(4): 1398?1404.
HE Shanghong, YANG Yunzi, Modeling of universal characteristics and optimization of operating conditions of concrete pump truck based on neural network[J]. Journal of Central South University (Science and Technology), 2010, 41(4): 1398?1404.
[8] LI Guang, WU Min. Modeling and controlling of a flexible hydraulic manipulator[J]. Journal of Central South University of Technology, 2005, 12(5): 578?583.
[9] ZHANG Chunyi, BAI Guangchen. Extremum response surface method of reliability analysis on two-link flexible robot manipulator[J]. Journal of Central South University, 2012, 19(1): 101?107.
[10] 芮筱亭, 戎保. 多體系統傳遞矩陣法研究進展[J]. 力學進展, 2012, 42(1): 4?17.
RUI Xiaoting, RONG Bao. Advances in transfer matrix method for multibody system dynamics[J]. Advances in Mechanics, 2012, 42(1): 4?17.
[11] Flores P. A parametric study on the dynamic response of planar multibody systems with multiple clearance joints[J]. Nonlinear Dynamics, 2010, 61(4): 633?653.
[12] 白爭鋒, 趙陽, 趙志剛. 考慮運動副間隙的機構動態特性研究[J]. 振動與沖擊, 2011(11): 17?20.
BAI Zhengfeng, ZHAO Yang, ZHAO Zhigang. Dynamics characteristics of mechanisms with joint clearance[J]. Journal of Vibration and Shock, 2011, 30(11): 17?20.
[13] Mukras S. Analysis and design of planar multibody systems with revolute joint wear[D]. Florida: University of Florida. Materials Science Engineering College, 2009: 55?62.
[14] BAI Zhengfeng, ZHAO Yang. Dynamic behaviour analysis of planar mechanical systems with clearance in revolute joints using a new hybrid contact force model[J]. International Journal of Mechanical Sciences, 2011, 54(1): 190?205.
[15] Dupac M, Beale D G. Dynamic analysis of a flexible linkage mechanism with cracks and clearance[J]. Mechanism and Machine Theory, 2010, 45(12): 1909?1923.
Multibody open-loop mobile concrete pump boom with joint elasticity multi posture natural frequency algorithm
REN Wu1, 2, WU Yunxin1, 2, ZHANG Zhaowei1, 2, ZENG Yihui1, 2
(1. State Key Laboratory of High Performance Complex Manufacturing, Central South University, Changsha 410083, China;2. School of Mechanical and Electrical Engineering, Central South University, Changsha 410083, China)
In order to calculate the different postures natural frequencies of multibody mobile concrete pump truck boom, the transfer matrix method was adopted. Then a four-boom equivalent mechanical model was established. The model was divided into sub-system A and B. The sub-system A was linked to the first boom, standoffs and its hydraulic cylinder. The sub-system B was linked to the other three booms and cylinders. The revolute joint elasticity of the boom cylinder connection was also considered. After packaging the two sub-systems, the frequencies of four common postures were solved, and an experiment was carried out on a test rig. The results show that it is not necessary to reset the parameters and resolve in different posture frequency calculations by transfer matrix method. At the same time, the frequencies considering joints elasticity are smaller than those of ideal joints and are closer to the test ones. All of these provide reference for natural frequency calculation and real-time monitoring for mobile truck booms.
multibody; boom; joint elasticity; transfer matrix method; vibration; natural frequency
TU646
A
1672?7207(2015)02?0485?06
2014?03?16;
2014?07?10
國家高技術研究發展計劃(863計劃)項目(2008AA042802);安徽省高等學校省級自然科學研究重點項目(KJ2013A141);湖南省自然科學基金資助項目(11JJ3059)(Project (2008AA042802) supported by the National High-Tech Research and Development Program (863 Program); Project (KJ2013A141) supported by the Natural Science Key Project of Anhui Provincial Universities; Project (11JJ3059) supported by the National Science Foundation of Hunan Province)
吳運新,博士,教授,博士生導師,從事機械結構動力學、機電控制、冶金機械研究;E-mail:renwu88@126.com
10.11817/j.issn.1672-7207.2015.02.016
(編輯 趙俊)
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
科學大眾(2023年17期)2023-10-26 07:39:14
艦船科學技術(2022年8期)2022-06-05 07:36:28
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
瘋狂英語·新讀寫(2020年3期)2020-06-06 09:05:56
數學物理學報(2020年2期)2020-06-02 11:29:24
中國公路(2017年18期)2018-01-23 03:00:38
數學物理學報(2017年6期)2018-01-22 02:26:40
光學精密工程(2016年6期)2016-11-07 09:07:19
核科學與工程(2015年4期)2015-09-26 11:59:03
