一種基于跟蹤信息的多基雷達系統航跡起始算法
2015-10-14 04:01:31劉紅亮但曉東周生華劉宏偉
電子與信息學報 2015年10期
劉紅亮 但曉東 周生華 劉宏偉
?
一種基于跟蹤信息的多基雷達系統航跡起始算法
劉紅亮*但曉東 周生華 劉宏偉
(西安電子科技大學雷達信號處理國家重點實驗室 西安 710071)
多基雷達系統(MSRS)可以大大提高目標定位性能,然而由于各個雷達站信噪比的差異,通常存在一些雷達站尚未建立目標航跡,從而不能最大程度地提高目標定位精度。因此,如何利用其它雷達站提供的目標跟蹤信息,提高尚未建立目標航跡的雷達站的探測性能是一個值得研究的問題。為此,該文提出一種基于跟蹤信息的航跡起始算法。首先將已經跟蹤到目標的雷達站提供的目標跟蹤信息,送至尚未建立目標航跡的雷達站;然后利用目標跟蹤信息和目標運動模型,建立目標預測波門;最終在虛假航跡起始概率恒定的條件下,調整預測波門內的檢測門限,完成目標檢測和航跡起始過程。仿真實驗表明,該算法可以大大提高目標檢測概率和目標航跡起始概率。
雷達;航跡起始;跟蹤信息;預測波門;虛假航跡起始概率
1 引言
多基雷達系統(MSRS)[1]通常由多個空間上分開的雷達站組成,可從不同角度探測目標,與傳統單站雷達相比具有較高的檢測性能[2]和定位性能[3,4]。多基雷達系統較高的定位性能需要各個雷達站均成功建立目標航跡,然而由于各個雷達站信噪比不同,往往存在某些雷達站尚未建立目標航跡。為充分發揮多基雷達系統較高的定位性能,需要各個雷達站盡快完成目標航跡的建立。
航跡起始算法按照其數據處理方式的不同,可以分為順序處理技術和批處理技術兩大類[5]:順序處理技術代表性的算法有直觀法、邏輯法等[6],其基本思想是對每次掃描得到的回波數據逐一處理,根據一定時間窗內的點跡關聯結果判斷是否建立初始航跡。順序處理技術具有較低的計算量,適用于背景雜波較弱的情況。批處理技術代表性的算法有Hough變換法及其改進算法,其主要思想是通過將多次掃描得到的回波數據聯合處理,利用Hough變換來實現回波信號的非相干積累,從而提高航跡起始性能。批處理技術適用于強雜波背景的情況,但由于計算量較大、實時性較弱,常用做離線處理。上述航跡起始算法基本都是在目標位置信息未知的條件下設計的。然而多基雷達系統中,已經跟蹤到目標的雷達站可以提供目標跟蹤信息,縮小目標位置不確定區域。本文出發點就在于如何利用該跟蹤信息,提高其它雷達站的航跡起始性能。
目前已有很多文獻討論如何利用目標跟蹤信息提高目標檢測性能。文獻[9]首次提出了利用跟蹤信息優化檢測門限的問題,并針對概率數據互聯濾波器[5],通過優化濾波器的狀態估計協方差矩陣求解出最優檢測門限。在文獻[9]的基礎上,文獻[10]和文獻[11]提出了不同的方法以獲得濾波器的狀態估計協方差矩陣的遞推形式。文獻[12]將上述協方差矩陣遞推方法看作是跟蹤濾波器的一種非仿真性質的性能預測,并且在奈曼皮爾遜準則下給出了最優檢測門限的閉式解。不同于上述檢測門限優化策略,文獻[13]在概率數據互聯濾波器的基礎上,通過利用濾波器反饋的跟蹤信息,提出了一種貝葉斯檢測器。
對于多基雷達系統,可以根據已經跟蹤到目標的雷達站提供的跟蹤信息縮小目標不確定區域,從而提高尚未航跡起始的雷達站的檢測性能和航跡起始性能。如果多個雷達站已跟蹤到目標,所得到的目標狀態估計可以送至數據融合中心進行航跡融合[14,15],以獲得更高的跟蹤定位精度。根據跟蹤信息,我們可以預測目標即將出現的區域,即預測波門。為提高目標檢測性能,可降低預測波門內的檢測門限,類似于上述文獻的檢測門限調整策略。然而較低的檢測門限將會造成過多的虛警,從而形成過多的虛假航跡。因此,有必要設計一定的準則,在降低檢測門限的同時,保證較低的虛假航跡起始概率。
針對多基雷達系統,本文提出了一種基于跟蹤信息的航跡起始算法。算法基本思想是,根據其它雷達站提供的跟蹤信息,在虛假航跡起始概率恒定的條件下,調整目標預測區域內的檢測門限,從而提高檢測性能和航跡起始性能。具體而言,首先根據已經跟蹤到目標的雷達站提供的跟蹤信息,建立目標預測波門;然后在給定的虛假航跡起始概率條件下,計算預測波門內出現虛警的概率(以下稱為幀虛警概率);根據幀虛警概率,計算預測波門內檢測單元的虛警概率(以下稱為單元虛警概率);最終根據單元虛警概率完成目標檢測和航跡起始過程。仿真實驗表明,無論是非機動目標還是機動目標,本文算法與傳統航跡起始算法相比,都可以大大提高目標檢測性能和航跡起始性能;此外,當目標突然發生機動時,會造成航跡起始性能的下降。
2 問題描述
在多基雷達系統中,通常需要將各個雷達站的目標跟蹤信息轉換至公共坐標系中。為簡便起見,本文假定各個雷達站不存在坐標變換誤差。此外,設各個雷達站之間時間基準相同,不存在定時誤差。
假設目標的運動模型[5]為

假設目標的觀測模型[5]為
對于已完成目標航跡起始的雷達站,根據式(1)和式(2),存在許多跟蹤算法[5]可提供目標的狀態估計(跟蹤信息)。各雷達站提供的跟蹤信息也可送至數據融合中心,通過航跡融合[14,15]獲得更加準確的目標狀態估計。然而,本文并不著重介紹如何得到該跟蹤信息,而是主要研究如何利用該跟蹤信息提高尚未建立目標航跡的雷達站的航跡起始性能。
3 算法描述
假設多基雷達系統中,某些雷達站已經跟蹤到目標并且已經得到目標跟蹤信息,令和分別表示第時刻目標狀態估計值和狀態估計協方差矩陣;某些雷達站(以雷達為例)尚未建立目標航跡。當雷達在第時刻(在第時刻之后)波束指向目標方向時,根據目標跟蹤信息,我們可以確定目標在第時刻可能出現的區域,即預測波門。

和狀態預測協方差矩陣:

由于目標狀態預測信息通常包含目標位置信息、目標速度信息等,因此仍需要從中提取目標位置信息。設目標位置的預測中心和預測協方差分別為和,則目標預測波門可以表示為

為提高目標檢測性能和航跡起始性能,我們可以降低預測波門內的檢測門限。然而,過低的檢測門限將會帶來過多的虛警,從而引入過多虛假航跡。為了提高檢測性能,同時將虛假航跡維持在一個可以接受的水平,我們在虛假航跡起始概率恒定的條件下調整預測波門內的單元虛警概率。不妨假設若連續幀的預測波門內存在過檢測門限的檢測統計量則建立目標航跡。在虛假航跡起始概率的條件下,幀虛警概率可以通過式(6)計算得到。

根據式(7)便可以計算出單元虛警概率,即
根據單元虛警概率,便可結合所用的檢測算法計算檢測門限,進而完成目標檢測和航跡起始過程。由于充分利用了其它雷達站提供的目標跟蹤信息,該算法的最終效果體現為預測波門內的航跡起始。因此,與傳統航跡起始算法相比,可以大大降低預測波門內的檢測門限,提高了目標檢測性能和航跡起始性能。當我們可以得到更高精度的跟蹤信息時,預測波門將會進一步減小,波門內可得到更低的檢測門限,從而獲得更好的檢測性能和航跡起始性能。
本算法并不局限于某種檢測算法或航跡起始算法,而是在通用的航跡起始框架下設定一定的準則,在恒定的虛假航跡起始概率條件下調整預測波門內的單元虛警概率,進而完成目標檢測和航跡起始,因此具有很高的普適性和工程應用價值。
4 仿真實驗與性能分析
考慮一個具有兩部雷達站且各雷達站異步工作的多基雷達系統,雷達位于坐標原點,雷達坐標為。設雷達波束寬度為,發射信號帶寬為=1 MHz,掃描周期為=10 s,雷達工作參數與雷達相同。
4.1非機動目標性能分析
仿真實驗中,目標狀態向量包含目標的位置信息和速度信息,即
考慮以下勻速運動模型[5]:

雷達觀測方程為
采用2/2邏輯起始方法,即連續2幀的預測波門內出現超過門限的信號則起始目標航跡。假設雷達距離測量精度75 m,方位角測量精度為0.004 rad,并且已經跟蹤到目標;雷達尚未起始目標航跡。在非協同工作模式下,即雷達單獨工作的情況下,虛警概率設置為;兩部雷達站協同工作模式下雷達的虛假航跡起始概率為。不失一般性,從第10幀開始利用雷達的跟蹤信息引導雷達起始目標航跡,并且利用第10幀和第11幀的跟蹤信息分析所提算法的目標檢測概率和航跡起始概率,如圖1所示。
由圖1(a)可以看出,在兩部雷達站協同工作模式下,由于充分利用了雷達提供的目標跟蹤信息,與非協同工作模式相比,雷達的目標檢測概率得到了很大的提升,并且第10幀和第11幀檢測概率基本維持不變。在檢測概率為0.50的條件下,非協同工作模式下所需的信噪比為12.78 dB,協同工作模式下所需信噪比僅為8.87 dB,信噪比的要求降低了3.91 dB。由圖1(b)可以看出,與非協同工作模式相比,兩部雷達站協同工作情況下雷達的目標航跡起始概率得到了很大的提高,其根本原因在于協同工作模式下目標的檢測性能得到了提升,進而獲得了航跡起始性能的得益。在航跡正確建立概率為0.50的條件下,非協同工作模式下所需的信噪比為15.90 dB,而協同工作模式下所需信噪比為12.17 dB,信噪比的要求降低了3.73 dB。等效為雷達作用距離則是,協同工作模式下完成航跡起始所需的目標距離推遠了23.95%。
4.2機動目標性能分析
仍采用4.1節中的仿真參數,但目標在第10幀突然以20 m/s2的加速度向雷達加速,分析目標檢測性能和航跡起始性能。協同工作模式與非協同工作模式下目標檢測概率和航跡起始概率對比如圖2所示。
由圖2(a)可以看出,在兩部雷達站協同工作模式下,由于充分利用了雷達提供的目標跟蹤信息,與非協同工作模式相比,雷達的目標檢測概率得到了很大的提升。目標發生機動后,造成預測信息的不準確,因此與非機動場景相比,檢測性能存在一定損失。在檢測概率為0.50的條件下,非協同工作模式下所需的信噪比為12.78 dB,協同工作模式下第10幀和第11幀所需信噪比分別為8.90 dB和9.48 dB,信噪比的要求仍然可以降低,并且分別降低了3.88 dB和3.30 dB。由圖2(b)可以看出,與非協同工作模式相比,兩部雷達站協同工作情況下雷達的目標航跡起始概率得到了很大的提高,但相對于非機動目標有了一定的性能下降。在航跡正確建立概率為0.50的條件下,非協同工作模式下所需的信噪比為15.90 dB,而協同工作模式下所需信噪比為12.51 dB,信噪比的要求降低了3.39 dB。等效為雷達作用距離則是,協同工作模式下完成航跡起始所需的目標距離推遠了21.55%。
可以看出,無論是機動目標還是非機動目標,所提算法均能提高目標的檢測性能和航跡起始性能。當目標真實運動模型與目標跟蹤模型匹配度較高時,預測波門可以有效覆蓋目標真實出現的位置,因此可以獲得較高的目標航跡起始概率;當目標真實運動模型與目標跟蹤模型失配時,由于目標機動造成的跟蹤性能的下降,使得預測波門不能有效覆蓋目標真實出現的位置,造成一定的性能損失。

圖1 雷達的目標檢測概率和航跡起始概率
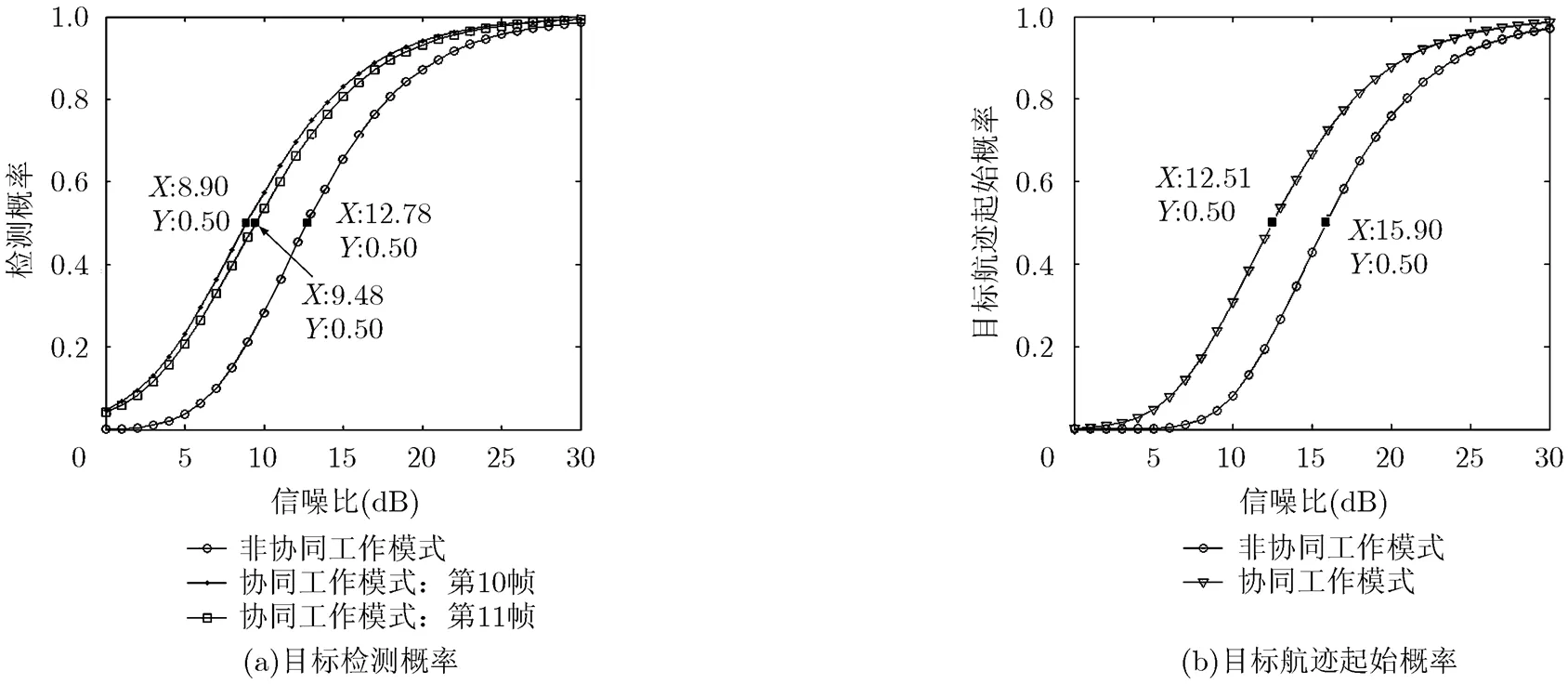
圖2 雷達的目標檢測概率和目標航跡起始概率
5 總結
本文給出了一種基于跟蹤信息的多基雷達系統航跡起始算法。算法中,尚未建立目標航跡的雷達站利用已經建立目標航跡的雷達站提供的目標跟蹤信息,結合目標運動模型建立目標預測波門,在保證自身的虛假航跡起始概率恒定的情況下,降低預測波門內的檢測門限,從而提高了目標檢測概率和航跡起始概率,改善了雷達的探測性能。仿真實驗表明,無論是針對機動目標還是非機動目標,與傳統航跡起始算法相比,本文算法均能大大提高目標航跡起始性能。另外,當目標突然發生機動時,由于預測信息準確度的降低,將會帶來一定的性能損失。
[1] Chernyak V S. Fundamentals of Multisite Radar Systems: Multistatic Radars and Multiradar Systems[M]. New York: Gorden and Breach Science Publisher, 1998: Chapter 1.
[2] Zhou Sheng-hua and Liu Hong-wei. Space-partition-based target detection for distributed MIMO radar[J]., 2013, 49(4): 2717-2729.
[3] 劉欽, 劉崢, 謝榮. 防空雷達網對多隱身目標的協同檢測與跟蹤[J]. 電子與信息學報, 2013, 35(3): 601-607.
Liu Qin, Liu Zheng, and Xie Rong. Collaborative detection and tracking of stealthy target by netted radar[J].&, 2013, 35(3): 601-607.
[4] 嚴俊坤, 戴奉周, 秦童, 等. 一種針對目標三維跟蹤的多基地雷達系統功率分配算法[J]. 電子與信息學報, 2013, 35(4): 901-907.
Yan Jun-kun, Dai Feng-zhou, Qin Tong,.. A power allocation approach for 3D target tracking in multistatic radar systems[J].&, 2013, 35(4): 901-907.
[5] 何友, 修建娟, 關欣, 等. 雷達數據處理及應用[M]. 第3版, 北京: 電子工業出版社, 2013: 第8章.
He you, Xiu Jian-juan, Guan Xin,.. Radar Data Processing with Applications[M]. Third Edition, Beijing: Publishing House of Electronics Industry, 2013: Chapter 8.
[6] 湯琦, 黃建國, 楊旭東. 航跡起始算法及性能仿真[J]. 系統仿真學報, 2007, 19(1): 149-152.
Tang Qi, Huang Jian-guo, and Yang Xu-dong. Algorithm of track initiation and performance evaluation[J]., 2007, 19(1): 149-152.
[7] 吳澤民, 張磊, 劉晗, 等. 基于隨機 Hough 變換的三維集中式航跡起始算法[J]. 電子學報, 2013, 41(5): 840-847.
Wu Ze-min, Zhang Lei, Liu Han,.. Centralized 3D track initialization using random Hough transformation[J]., 2013, 41(5): 840-847.
[8] 鹿傳國, 馮新喜, 孔云波, 等. 并行Hough變換航跡起始[J]. 雷達學報, 2013, 2(3): 292-299.
Lu Chuan-guo, Feng Xin-xi, Kong Yun-bo,. Track initiation based on parallel Hough transform[J]., 2013, 2(3): 292-299.
[9] Fortmann T, Bar-Shalom Y, Scheffe M,.. Detection thresholds of tracking in cluttera connection between estimation and signal processing[J].1985, 30(3): 221-229.
[10] Li X R and Bar-Shalom Y. Detection threshold selection for tracking performance optimization[J]., 1994, 30(3): 742-749.
[11] Gelfand S B, Fortmann T E, and Bar-Shalom Y. Adaptive detection threshold optimization for tracking in clutter[J].1996, 32(2): 514-523.
[12] Aslan M S, Saranl A, and Baykal B. Tracker-aware adaptive detection: an efficient closed-form solution for the Neyman-Pearson case[J]., 2010, 20(5): 1468-1481.
[13] Willett P, Niu R, and Bar-Shalom Y. Integration of Bayes detection with target tracking[J].2001, 49(1): 17-29.
[14] Tian Xin and Bar-Shalom Y. On algorithms for asynchronous track-to-track fusion[C]. 2010 13th Conference on Information Fusion,Edinburgh, England, 2010: 1-8.
[15] 董凱, 關欣, 王海鵬, 等. 基于序貫修正灰關聯度的全局最優航跡關聯算法[J]. 電子與信息學報, 2014, 36(8): 1939-1945. Dong Kai, Guan Xin, Wang Hai-peng,.. Global optimal track association algorithm based on sequential modified grey association degree[J].&, 2014, 36(8): 1939-1945.
A Track Initiation Algorithm for Multisite Radar Systems Based on Tracking Information
Liu Hong-liang Dan Xiao-dong Zhou Sheng-hua Liu Hong-wei
(,,710071,)
MultiSite Radar Systems (MSRS) can significantly improve target localization performance. However, due to the difference of signal-to-noise ratios of separate radar sites, there usually exist some radar sites that have not initiated a target track, hence target localization accuracy can not be improved to the best. So an interesting problem is how to use target tracking information provided by other radar sites to improve the detection performance of the radar sites that have not initiated the target track. In this paper, a track initiation algorithm based on tracking information is proposed. Firstly, the target tracking information provided by the radar sites that have already tracked a target is transmitted to the radar sites that have not initiated the target track. Then, a predicted gate is established according to the tracking information and target dynamic model. Finally detection thresholds in the predicted gate are adjusted under a constant probability of false track initiation, and target detection and track initiation are accomplished. Numerical results indicate that the proposed algorithm can significantly improve the probability of target detection and target track initiation.
Radar; Track initiation; Tracking information; Predicted gate; Probability of false track initiation
TN953
A
1009-5896(2015)10-2536-05
10.11999/JEIT150148
2015-01-27;改回日期:2015-05-26;
2015-06-29
劉紅亮 hlliuxidian@gmail.com
國家自然科學基金(61401329, 61271024, 60901065)
The National Natural Science Foundation of China (61401329, 61271024, 60901065)
劉紅亮: 男,1989 年生,博士生,研究方向為目標檢測、目標跟蹤與定位、協同探測.
但曉東: 男,1989 年生,碩士生,研究方向為目標檢測、目標跟蹤與定位、協同探測.
周生華: 男,1982年生,博士,副教授,研究方向為MIMO雷達、協同探測.
劉宏偉: 男,1971年生,博士,教授,博士生導師,研究方向為雷達系統、雷達信號處理、雷達自動目標識別等.
猜你喜歡
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
中華手工(2017年2期)2017-06-06 23:00:31
海峽科技與產業(2016年3期)2016-05-17 04:32:12
中外會展(2014年4期)2014-11-27 07:46:46
建筑創作(2001年3期)2001-08-22 18:48:14
祝您健康(1987年3期)1987-12-30 09:52:32
