控制分配在平流層飛艇姿態控制中的應用*
2015-11-05 03:42:10侯中喜楊希祥
國防科技大學學報 2015年4期
王 鵬,侯中喜,楊希祥
控制分配在平流層飛艇姿態控制中的應用*
王 鵬,侯中喜,楊希祥
(國防科技大學 航天科學與工程學院, 湖南 長沙 410073)
針對平流層飛艇一般采用多控制機構的特點,將廣義逆控制分配方法應用到飛艇姿態控制系統中,并根據飛艇控制機構特性采用了加權偽逆控制分配算法。飛艇姿態控制仿真結果表明:設計的控制分配方法可以有效實現多控制機構的協調操縱,對姿態角控制效果良好,避免了單一操縱舵面過早進入飽和狀態的情況;合理調整控制分配權值可減少能量損耗,增強實時性,便于工程實現。
平流層飛艇;控制分配;姿態控制;廣義逆
(College of Aerospace Science and Engineering, National University of Defense Technology, Changsha 410073, China)
平流層飛艇主要依靠浮力提供升力,能夠長期停留空中的優勢使其成為臨近空間承載平臺的最佳選擇之一,其具有廣闊的軍事和民用應用前景,已成為近期各國研究的重點。由于平流層飛艇體積龐大,一般使用多種控制機構進行飛行控制,例如對飛艇的姿態控制方法就包括對重心的調整、浮心的調整、左右發動機推力配平以及氣動舵面的調整等。多種控制機構需要同時協調作用,對飛行控制系統的設計帶來巨大的挑戰。
由于現代多操縱面飛行控制系統設計的需要,自20世紀90年代開始多操縱面控制分配技術得到了廣泛的研究,并在某些實際控制系統當中已經得到了實際應用[1-2]。Doman等利用線性規劃方法研究了具有氣動冗余的飛行器控制分配問題[3];Bolender等研究了基于線性規劃方法的可重復使用飛行器的控制分配問題[4];韓放等研究了采用線性規劃的控制分配方法設計基于綜合能量優化的超高空觀測平臺的姿態控制策略[5]。
基于廣義逆原理的控制分配方法具有良好的動態性能和較強的魯棒性,同時能有效地降低控制量的最大值,降低對執行機構的要求,計算簡單,工程實現容易[6]。
1 飛艇非線性動力學模型
為了便于簡化分析,在建模時作如下假設:
1)飛艇為剛體,忽略其彈性效應;
2)飛艇具有縱向對稱平面,并且重心在對稱平面內;
3)飛艇的體心和浮心重合。
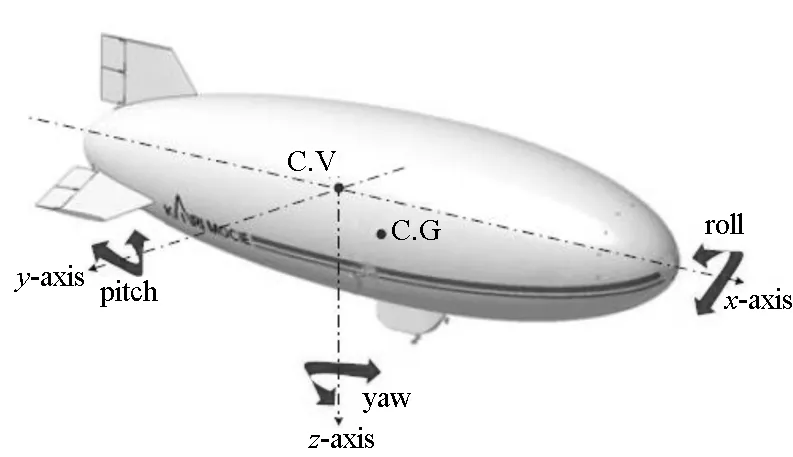
圖1 飛艇布局示意圖Fig.1 Layout of the airship
飛艇布局類似于韓國VIA飛艇,如圖1所示。艇體坐標系原點取在飛艇體心,坐標與飛艇固連。x軸與艇體的設計軸線平行,且處于艇身對稱平面內;y軸垂直于艇身對稱平面指向右方;z軸在艇身對稱平面內,且垂直于x軸指向下方。駐空期間,體心與浮心重合,重心在體心之下,沿艇體各軸的速度分量為u、v、w,繞艇體各軸角速率分量為p、q、r。
作用在飛艇上的力主要包括:流體慣性力、空氣動力、螺旋槳發動機推力、重力和浮力。則艇體坐標系上質心運動的動力學方程為:
(1)
繞艇體坐標系各軸轉動的動力學方程為:
(2)
式(1)和式( 2)右端是作用在飛艇上的力和力矩在艇體坐標系各軸上的分量之和。其中xG,yG,zG為重心坐標;m為飛艇質量。根據前文假設有:yG=0,慣性矩Ixy=Iyz=0。
2 控制分配方法
所研究的飛艇基本布局如圖1所示,其螺旋槳發動機的配置包括:尾部螺旋槳發動機以及艇腹兩側的推力矢量螺旋槳發動機,尾翼為“十”字型布局,尾翼上裝有兩個升降舵和兩個方向舵。
2.1 控制分配方法原理
飛艇的動力學方程可寫成如下形式:

(3)

(4)
有解,說明飛艇具有足夠的控制能力。
式(4)還說明控制機構產生的力矩是用于修正需要的角加速度和飛艇的原始角加速度之間的差。由于控制機構的數目(4種)大于控制參數(3個角速度),所以必須使用控制分配方法以獲取一個確定解。
假設飛艇的期望控制轉矩是v(t)∈Rk,操縱機構偏轉量為δ(t)∈Rm,這里m>k。
給定v(t),δ(t)使
f(δ(t))=v(t)
(5)
式中,f:Rm→Rk是非線性映射函數。將f線性化,則式(5)變為:
Bδ(t)=v(t)
(6)
式中,B∈Rk×m是控制效率矩陣。
考慮作動器位置限制和作動器速率限制,則有:
(7)
由于數字控制系統存在合理的近似時間微分:

(8)
式中,T為采樣時間。
(9)
則帶約束的非線性控制分配問題描述轉化為如式(10)的標準形式:
(10)
即在期望控制轉矩v(t)要求下,需要控制分配器求解得到操縱機構偏轉指令量δ(t),并滿足約束條件。以上問題的解有以下3種情況:①有多組解,需根據某些性能指標進行優化,尋求最優解;②只有1組解;③無解 :需在約束條件下盡可能使f(δ)逼近v。
目前國內外關于控制分配方法的研究成果具體可歸納為兩大類:基于優化的分配法和非優化的分配法。基于優化的方法主要包括廣義逆法和基于線性規劃的直接幾何方法以及基于二次規劃的動態分配法;非優化控制分配方法主要包括直接幾何法和串接鏈(daisy chain)控制分配法[6-7]。
2.2 基于加權偽逆法的控制分配算法
考慮到工程實現的可行性并采用相對簡單的求解策略,因此使用廣義逆法[8-9]進行優化問題的求解。廣義逆法主要包括偽逆法、最優廣義逆法等。它的基本思想是在控制無約束的情況下,對期望運動的廣義逆求解并對解進行優化。
通常優化問題可采用最小范數法解決,偽逆法就是取控制量的最小2范數(能量函數)為優化指標求解的。偽逆法在所有飛行條件下,各個控制量都參與進行協調控制,可以避免單一操縱面進行操縱時舵量過早進入飽和的問題。
設代價函數為J=uTu,約束條件為Bu=v,定義標量函數:
H(u,λ)=0.5uTu+λT(Bu-v)
(11)
根據求極值的條件,可得出其右逆解:
u=B*v=BT(BBT)-1v
(12)
偽逆符號的表示為:A*=AT(AAT)-1。
但傳統偽逆法求解中,沒有考慮各操縱面使用效率的不同以及各舵面速率和位置飽和的限制,為此引入加權后的操縱機構控制分配優化指標:
(13)
式中,W為對稱正定權值矩陣。對J求u和λ的偏微分。結合上述偽逆法求解可推導出:
u=W-1(BW-1)*v
(14)
從而得到加權偽逆法,其主要目的是在進行控制分配求解時按照使用側重點的不同對各控制執行機構進行加權處理。選擇的權值矩陣為對角正定矩陣,矩陣元素與操縱面控制效率有關。如果適當減小控制效率低但位置飽和限制小的操縱面的對應權值,則可以增加其控制分配權限,從而避免操縱效率高的操縱面控制量過大的問題。
3 仿真結果及分析
以文獻[10]提供的平流層飛艇數據為例。為實現俯仰機動,可以使用尾部螺旋槳發動機以及艇腹兩側的推力矢量螺旋槳發動機、尾翼上的氣動舵面三種操縱面進行協調控制。氣動舵面的控制效率與動壓密切相關,當動壓Q<10Pa時,氣動舵面效率很低,一般不用氣動舵面進行姿態控制;當機上傳感器測量到動壓Q≥10Pa時,氣動舵面參與控制分配。
選取仿真條件如下: 平流層飛艇在20km高處定點懸停,大氣密度為0.088 909 9kg/m3,縱向平面內的有水平常值風風速為-20m/s,分別采用推力矢量發動機單獨控制、常規偽逆控制分配方法和加權偽逆控制分配方法這三種控制方式,以10°俯仰角為控制目標進行數字仿真。
在仿真時為減小控制過程中的能量損耗,適當增大氣動舵面偏轉量,減小尾部發動機和推力矢量發動機的控制量。加權偽逆控制分配權值矩陣依據各操縱面在俯仰轉動方向上的控制效率比值和期望的偏轉量,根據權值大控制量較小的原則取為:依次對應尾部發動機油門控制量、推力矢量發動機偏轉角度和升降舵的控制量。
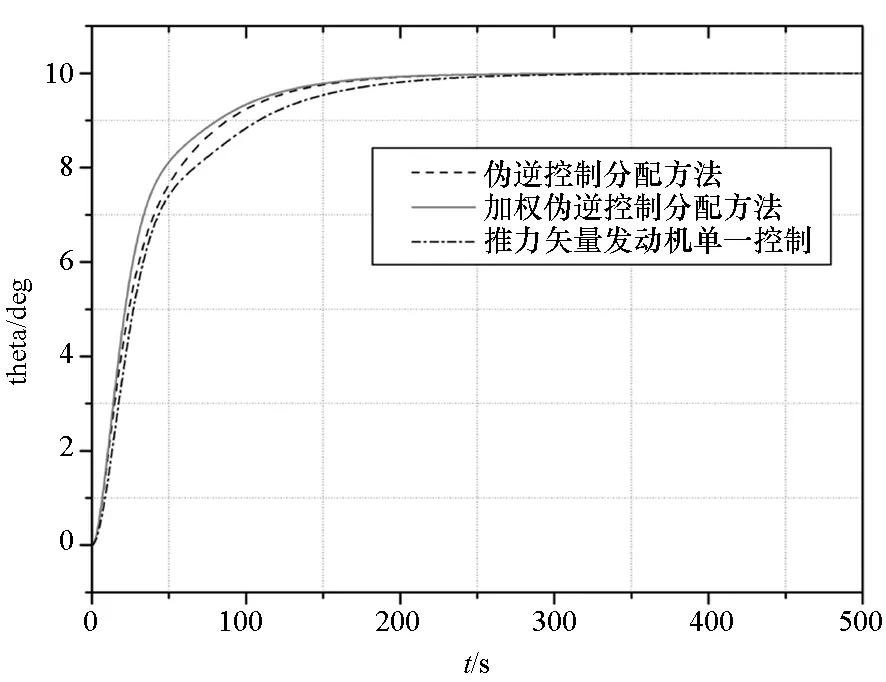
圖2 不同控制分配方法俯仰角控制結果對比Fig.2 Pitch angle control results for different control allocation approaches
圖2給出了三種控制方式的俯仰角控制響應結果,產生的控制力矩都能跟蹤指令值,實現10°俯仰角的控制目標;加權偽逆控制分配方法響應最快,單一推力矢量發動機進行控制時響應較慢。

圖3 不同控制分配方法推力矢量螺旋槳發動機偏轉角度對比Fig.3 Thrust-vector propeller deflection angle for different control allocation approaches
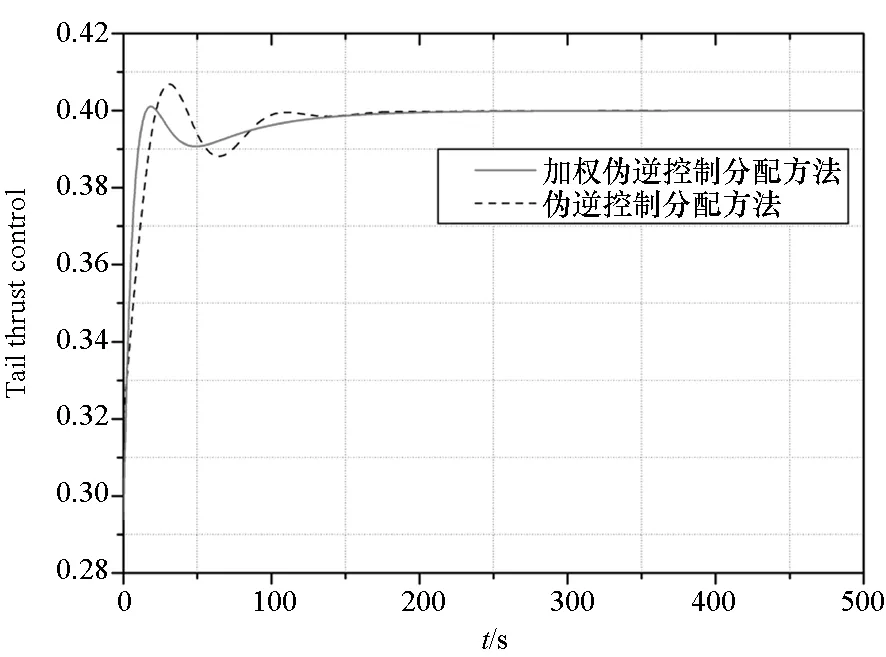
圖4 不同控制分配方法尾部發動機油門控制量對比Fig.4 Tail engine throttle control results for different control allocation approaches
圖3和圖4給出了控制過程中推力矢量發動機偏轉角度和尾部發動機油門控制量對比。推力矢量發動機單一控制時偏轉量最大,采用加權偽逆控制分配方法時偏轉量最小;而采用加權偽逆控制分配方法時油門的調整量也較小,可見采用加權偽逆控制分配可以有效減小能量損耗。
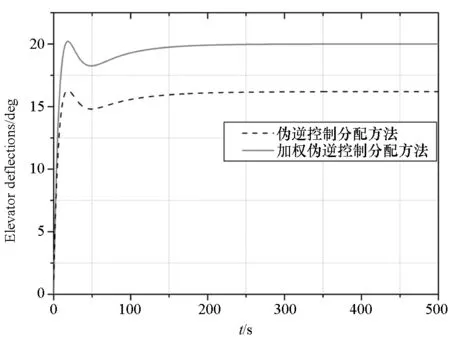
圖5 不同控制分配方法升降舵偏轉角度對比Fig.5 Elevator deflections for different control allocation approaches
圖5給出了兩種控制分配方法尾翼升降舵偏轉過程對比,使用常規偽逆控制分配方法時升降舵最大偏角為16.2°,使用加權偽逆控制分配方法時升降舵最大偏角為20°,與適當增大氣動舵面偏轉量的期望一致。根據實時動壓數據,調整控制分配算法中升降舵的權重值可以有效調整升降舵的控制量,減小其他在操縱時能量損耗較大的控制機構的控制量,從而減小整體的能量損耗。當動壓足夠大時可以只用氣動舵面進行操縱。
通過分析仿真結果可知:所使用的控制分配方法可以有效協調控制飛艇的多種操縱機構,對飛艇姿態角具有良好的穩定控制效果,動態性能滿足要求;同時采用加權偽逆法后,可以根據各操縱面的實際控制效率和能耗情況調整控制分配的權值,降低系統的能耗。
4 結論
將改進后的廣義逆控制分配方法應用于飛艇姿態控制器中可有效協調控制平流層飛艇的多種操縱機構,提高飛艇控制能力,其姿態控制效果良好,可以避免單一操縱面控制量過大的問題;通過合理調整控制分配權值可以降低系統的能耗。這一控制分配方法實現簡單,實時性較好,便于工程實現。缺點是對控制機構偏轉速率等不同約束的處理還不是很理想。
References)
[1] Bodson M. Evaluation of optimization methods for control allocation[J]. Journal of Guidance, Control, and Dynamics, 2002, 25(4):700-711.
[2] Page A, Steinberg M. A closed-loop comparison of control allocation methods[C]//Proceedings of the AIAA Guidance, Navigation, and Control Conference, AIAA A00-37180, 2000.[3] Doman D B, Gamble B J, Ngo A D. Control allocation of reaction control jets and aerodynamics surfaces for entry vehicles[C]//Proceedings of AIAA Guidance, Navigation and Control Conference and Exhibi, AIAA-2007-6778, 2007.[4] Bolender M A, Doman D B, Opeenherimer M W. Application of piecewise linear control allocation to reusable launch vehicle guidance and control[C]// Proceedings of the 14th Mediterranean Conference on Control and Automation, 2006:1-10.[5] Di X G, Han F, Yao Y. Attitude control allocation strategy of high altitude airship based on synthetic performance optimization [J]. Journal of Harbin Institute of Technology (New Series), 2009, 16(6):746-750.
[6] Doman D B,Ngo A D. Dynamic inversion-based adaptive/reconfigurable control of the X-33 on ascent [J]. Journal of Guidance, Control, and Dynamics, 2002, 25(2): 275-284.[7] 楊恩泉,高金源,李衛琪.多目標非線性控制分配方法研究[J].航空學報, 2008, 29(4):995-1001.
YANG Enquan,GAO Jinyuan,LI Weiqi.Research on multi-object nonlinear control allocation method[J].Acta Aeronautica et Astronautica Sinica, 2008, 29(4):995-1001. (in Chinese)
[8] Enns D. Control allocation approaches [C]//Proceedings of the 1998 AIAA Guidance, Navigation, and Control Conference, AIAA-1998-4109, 1998.[9] Burken J J, Ping L. Two reconfigurable flight control design methods: robust servomechanism and control allocation [J]. Journal of Guidance, Control, and Dynamics, 2001, 24(3):482-493.
[10] Joseph B M, Michael A P, Zhao Y Y. Development of an aerodynamic model and control law design for a high altitude airship [C]//Proceedings of AIAA the 3rd “Unmanned Unlimited” Technical Conference Workshop and Exhibit, Chicago, 2004:1-17.
Control allocation approach for stratospheric airship attitude control
WANG Peng, HOU Zhongxi, YANG Xixiang
The stratospheric airships generally act with the redundant control effectors, thus a control allocation approach based on generalized inverse was applied to the airship attitude control system and the weighted pseudo-inverse control allocation method was adopted on the basis of characteristics of airship control effectors. The simulation results of a stratospheric airship attitude control show that: the designed control allocation approach can realize the coordinated operation of redundant control effectors effectively and its control effect on attitude angle is good, which avoids the premature saturation of control surface when using single effector; the reasonable adjustment of control allocation weights can reduce energy consumption, enhance instantaneity and provide convenience in engineering.
stratospheric airship; control allocation; attitude control; generalized inverse
2015-04-08
國家863 計劃資助項目(2014AA7052002)
王鵬(1980—),男, 湖南湘潭人,副教授,博士,E-mail:wangp_xt@163.com
10.11887/j.cn.201504003
http://journal.nudt.edu.cn
V249
A
1001-2486(2015)04-015-04
猜你喜歡
鐵道通信信號(2020年9期)2020-02-06 09:15:22
民用飛機設計與研究(2019年2期)2019-08-05 01:33:40
數學大王·趣味邏輯(2019年5期)2019-06-13 20:27:43
小學科學(學生版)(2019年5期)2019-05-21 01:00:18
經濟技術協作信息(2018年30期)2018-11-22 06:20:24
Coco薇(2016年2期)2016-03-22 02:42:52
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年4期)2015-05-19 14:47:56
汽車與新動力(2015年1期)2015-02-27 12:11:01
汽車與新動力(2013年5期)2013-03-11 16:08:17