基于前方交會的全站儀免棱鏡測距精度檢查淺析
2015-11-17 10:23:26何康
赤峰學院學報·自然科學版 2015年21期
何康
(延安大學西安創新學院 建工系,陜西 西安 710100)
基于前方交會的全站儀免棱鏡測距精度檢查淺析
何康
(延安大學西安創新學院建工系,陜西西安710100)
全站儀免棱鏡功能極大的提高了測量工作的效率,然而,工作人員對免棱鏡測距的穩定性和精度有疑問,由于常規測量工作的視線長度和工作環境不易用鋼尺進行直接檢查,本文根據全站儀測角精度相對較高且穩定的特點,使用角度前方交會法對全站儀測量平距的精度和穩定性進行了實測檢查,并分析了目標不同顏色、不同入射角、不同豎直角對測量平距的影響.
免棱鏡;測距精度;前方交會
1 引言
免棱鏡全站儀自問世以來,因其不需要合作目標,大大減輕了目標方立鏡員的勞動強度,提高了測量速度,在一些人無法到達的危險區域特征點的測量上尤其發揮了其獨特的優勢,進行人工地物的角點測量時,無須考慮棱鏡尺寸,精度更高.與老式全站儀(必須有合作目標)相比,免反射棱鏡全站儀具有測量效率高、精度高、使用范圍廣等優點,在工程測量、地形測量等領域有廣泛的應用.
免棱鏡工作模式所需激光發射功率大,老式全站儀只有在反射棱鏡的配合下才可測距,無棱鏡式可對任意目標進行測距,工作中測量人員發現了測量的穩定性和精度存在一些問題,并設法解決,一些儀器廠商也配套的出臺了幾種方案.本文通過實驗查了國產瑞得RTS-862R全站儀免棱鏡測距模式的穩定性和精度,并分析了目標不同顏色、不同入射角和不同豎直角對免棱鏡測量平距的影響.
2 全站儀測距精度評價
全站儀測距精度,一般是指經加常數K、乘常數R改正后的觀測值的精度.雖然加常數和乘常數分別屬于固定誤差和比例誤差,但不是測距精度的表征,而是需要在觀測值中加以改正的系統誤差,故從某中意義上來說,與標稱誤差中的A和B是有區別的.因為測距的綜合精度指標,一般以下式表示:

每臺儀器出廠前就標定了A和B的值,但使用過程中往往需要再行檢驗,一方面是通過檢驗看某臺儀器是否符合出廠的精度標準(標稱精度),另一方面是看儀器是否還有一定的潛在精度.這與加常數K、乘常數R的檢驗目的是不一樣的.前者是為了檢驗儀器質量,后者是為了改正觀測成果,決不能用檢定精度的指標A與B去改正觀測成果.
3 實驗實施
3.1實驗思想
本文對瑞得全站儀RTS-862R的免棱鏡測距模式進行了檢驗,儀器標稱:免棱鏡測距300m,測距精度±5+2*D ppm,測角精度±2".儀器自動感應溫度、氣壓、濕度等環境參數,進行溫度氣壓等改正.通過實驗,免棱鏡測距的長度與反射目標的顏色、濕度、粗糙度等有關,白色物體的反射率較高,免棱鏡測距極限將近200m,年代久的灰暗磚墻不足100m.免棱鏡測量距離較短,由全站儀測距誤差的組成:加常數和乘常數±5+2ppm*D,可知:短距離下100m內,測距誤差的乘常數影響很小,以加常數為主.
全站儀測角精度已基本成熟穩定,本實驗采用精測角度通過前方交會獲得測站與目標點的水平距離,并作為真值檢測儀器測量平距的誤差.本實驗包括地面控制網的建立、目標點的量測兩個主要部分,考慮到不同目標灰度、不同入射角、不同豎直角對測量平距的影響,地面控制網為一個三角形,一點正對目標墻,其余兩點的入射角偏大,目標分為高目標(豎直角超過30°)和平視目標(豎直角接近0°),目標上各自有3個中心,分別為白、灰、黑色.目標點距離三個控制網點的距離大致相等.
首先建立三角形控制網,根據地面情況和距離的長短精測一條邊的邊長,采用多次測角取平均值獲取高精度控制網角度數據,由正弦定理求取另兩條邊的邊長,使用全站儀進行免棱鏡測距,考察測量平距的準確性,并進行加常數的糾正.其次,在三角形一點正對墻面上設立高目標和平視目標,目標由白、灰、黑3個上下排列的長為1.5cm的正方形組成,分別從三角控制網點測量距離目標的平距,考察糾正加常數后的測距穩定性,并分析不同目標灰度、不同入射角、不同豎直角對測量平距的影響.
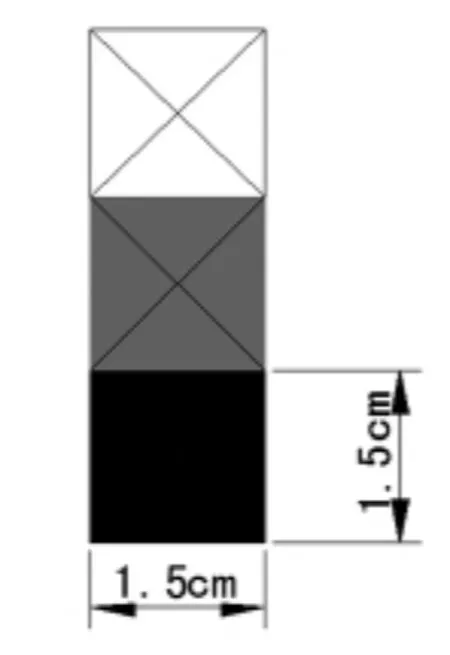
圖1 目標組成
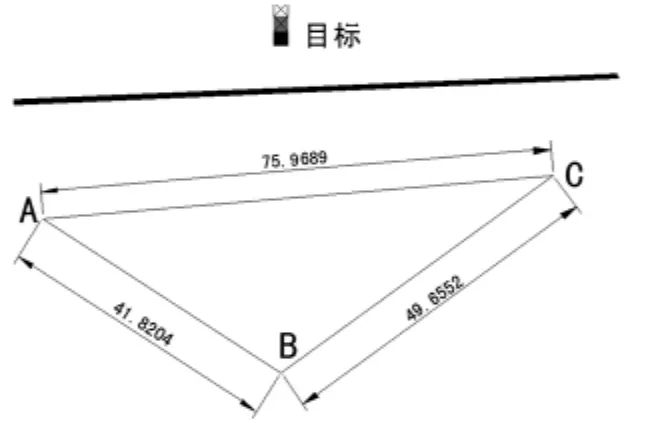
圖2 三角形控制網
3.2控制網的建立
試驗控制網為一個三角形,對三角形的三個內角分別進行20次獨立測量,計算均值與中誤差,得∠A=37017'57",∠B=11200'46.5",∠C=30041'17",閉合差ω=+0.5".根據三角形的內角和為1800對三個內角進行改正,修正后的角度值分別為∠A=37017'56.8",∠B=11200'46.4",∠C=30041'16.8".根據概率統計理論,計算測角的中誤差,分別為:

采用精密鋼尺量距多次測量條件最好的一條邊長,測得DAB=41.8204m,由正弦定理,計算出 DBC=49.6552m,DAC=75.9689m.根據以上測量數據,最長邊長約為76m,最大測角誤差小于0.8",可推知,由于測角誤差引起的距離向偏差很小,小于0.3mm.由此可得,該控制網的邊長與角度數據是較為穩定可靠的,可作為免棱鏡測距的真值.
3.3加常數的獲取
使用RTS-862R配合反射板進行平距的復驗.使用無棱鏡模式分別獨立測量每條邊長12次,可得下表1.由于目標點在地面上,豎直角與儀器高和邊長有關,儀器高度約為1.5m,最短邊長約40m,可得豎直角很小,反射板垂直放置,入射角即為豎直角,入射光線幾乎與反射面垂直.
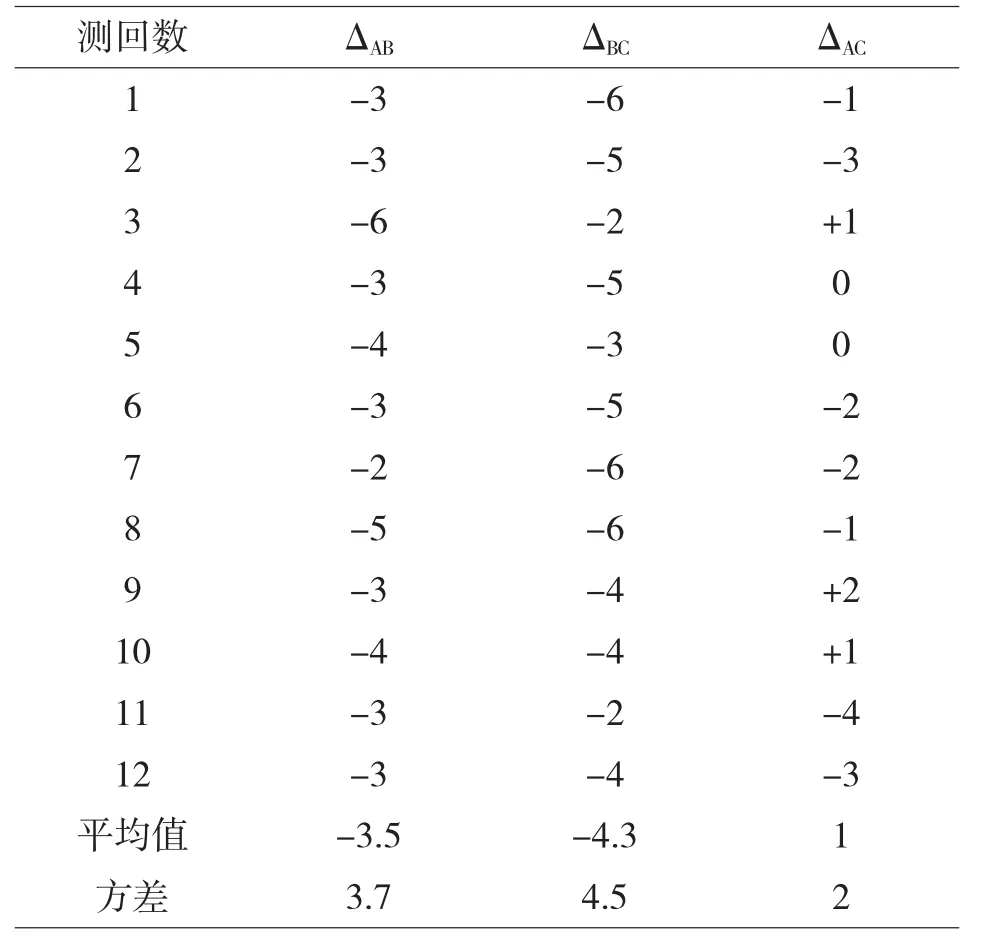
表1 免棱鏡測量控制網邊長所得真誤差
通過表1數據可得,在入射角和豎直角都較小時,AB與BC邊長相似測量的平距是基本穩定的,AC邊較長,免棱鏡測得平距較短邊更接近真值,但與短邊的平均差和方差存在較大差距.由此可知,實際測距時,還存在其他影響精度的非常數因素,有可能是儀器大氣參數模型或測尺頻率不穩定等因素造成的,與試驗距離有關,但又不是簡單的乘常數.基于3個控制網點與目標平距相差不遠,約為控制網短邊長度,按照上表1所得結果確定儀器的加常數+4mm.對所得距離進行修正,得AB與BC邊長的最大測量真誤差2mm.
3.4前方交會檢驗測距精度
在B點正對墻面上設立與儀器約同高的3色目標,從上至下分別為白灰、黑色,3個中心分別為D1、D2、D3,使用相似的原理,多次測量目標與三角形控制網3條邊長所形成的夾角∠DiAB,∠DiAC,∠DiBA,∠DiBC,∠DiCA,∠DiCB,進行角度改正,確定目標至3個控制網點A、B、C的平距可靠值,并依此為真值,對修正加常數后的免棱鏡測距進行檢驗.
4 試驗結果分析
根據平距的計算公式:

式中:HD—平距,SD—斜距,α—豎直角.
可得平距的誤差模型:

式中:mHD—平距誤差,mSD—斜距誤差,mα—豎直角誤差.
4.1第一組實驗分析
第一組實驗分別從A、B、C點測量至平視目標點的平距(都約為40m左右),測量時豎直角幾乎為0,從B點測量的入射光線幾乎與墻面垂直,從A點和C點測量的入射角較大,約為67°和74°,由測量結果知,加常數修正后由B點測量的距目標的平距值在白色和灰色反射體上的距離與真值非常接近,最大不超過3mm,方差±2.7mm,在黑色反射體上的最大偏差5mm,方差±4.1mm.總體來說,豎直角很小且垂直入射的平距測量精度是有保證的.但從B、C點量取的真誤差呈現不規律性,激光束在墻體上的光斑較寬,約為10mm,真誤差在-9mm~+12mm范圍內,誤差較大,不能忽視.
4.2第二組實驗分析
第二組實驗分別從A、B、C點測量至高處目標點的平距,豎直角約在27°~38°范圍內,測量的入射角接近豎直角.由測量結果知,雖然經過加常數修正,由A、B、C點測量的距目標的平距值偏離真值的幅度明顯增大了,變化值達幾個厘米,而且呈現不規律性,可見豎直角仍是影響平距精度的極重要因素.不同的顏色在較長的距離和較大入射角的影響下也凸現出來.黑色反射面上出現了無測量值,灰色反射體測量精度較白色反射體也有所下降.
5 結論
全站儀的測距精度素來是研究熱點之一,免棱鏡測距精度的可靠性也是值得探討的重要問題,它極大的影響著免棱鏡操作的點位坐標精度.本文根據全站儀測距精度較為穩定的特點,經過多次測量角度取均值后前方交會,得到距離的可靠值,以此作為真值,對全站儀免棱鏡測量的平距進行檢驗.試驗發現,短距離下測距誤差除加常數外,還與試驗距離有關,但又不是簡單的乘常數.在近似距離垂直入射的情況下,可簡單的進行加常數的校正,校正后與同樣幾乎垂直入射,且豎直角較小的真值是較為相符的.大的入射角使測距精度不穩定,顏色的變化在近距離時影響不大.而豎直角是影響平距精度不可忽視的因素.
〔1〕張偉航,劉金山,楊姍姍,李建剛.免棱鏡全站儀性能測試[J].礦山測量,2013.
〔2〕王勝強.無反射棱鏡全站儀測距精度分析[J].測繪與空間地理信息,2012.
〔3〕吳呂穩,劉新富,許茵.免棱鏡全站儀測量的精度分析[J].浙江測繪,2012(2).
〔4〕譚國銓,肖成,趙亮.免棱鏡全站儀測距特性的測試與分析[J].電力勘測設計,2012.
〔5〕岳建平,高永剛,謝波.無反射棱鏡全站儀測距性能測試[J].測繪工程,2005(2).
P204
A
1673-260X(2015)11-0068-02
猜你喜歡
北京測繪(2020年12期)2020-12-29 01:37:18
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
工程與建設(2019年3期)2019-10-10 01:40:18
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
電測與儀表(2016年9期)2016-04-12 00:29:52
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
吉林地質(2014年3期)2014-03-11 16:47:31
河南科技(2014年22期)2014-02-27 14:18:08