渾水中船舶水下觀察檢測技術初探
2015-11-25 01:37:17張文瑤酈智斌91872部隊上海200083
中國修船 2015年6期
張文瑤,酈智斌(91872部隊,上海 200083)
渾水中船舶水下觀察檢測技術初探
張文瑤,酈智斌
(91872部隊,上海 200083)
文章主要開展了水下多波束成像觀察檢測技術研究,采用多波束聲吶成像、聲透鏡聲吶成像和局部清水成像方法,在渾水水域,對船舶目標進行了實船水下觀察檢測,從而構建了船舶渾水條件下水下觀察檢測體系。
水下檢測;聲吶成像;船舶
在我國東海地區、長江流域和江河入海口等渾水區域,常規的水下照相、攝像等水下觀察檢測是無法進行的,水下微光攝像、水下激光成像等設備的使用也是有限的,渾水條件下水下觀察檢測是世界公認的水下作業難題之一。多波束成像檢測技術,與傳統的單波束檢測系統相比,具有掃幅寬、全覆蓋、高效和高精度的特點,它的誕生對聲學探測技術的發展具有劃時代的意義,是解決渾水條件下觀察檢測的有效技術手段。
1 水聲成像檢測技術
聲波是迄今為止水中最有效的信息載體。高分辨率成像聲吶是在渾濁水域對水下目標以及環境進行成像檢測的最有效手段。
雖然聲吶技術的不斷發展使得成像聲吶的分辨率等技術指標不斷提高,但是由于信息載體和傳輸介質的差別,聲吶圖像與我們熟悉的光學圖像相比,仍然具有分辨率低、噪聲和混響干擾強、目標邊緣模糊不清等特點,給水下目標的檢測帶來巨大困難。因此一個完整的船舶成像檢測平臺,除了要有較高分辨率的成像聲吶設備,還必須配有聲吶圖像處理模塊,依托聲吶圖像處理技術改善獲取的原始圖像的質量,或者在特定需求背景下提取并識別可疑目標,以提高觀察檢測的效果。
按照水下聲學成像系統的探測范圍可把水下聲學成像系統分為2大類。
第1類就是用于大面積、大深度掃海測量的水聲成像系統,主要包括多波束測深系統、側掃聲吶系統和合成孔徑聲吶系統等。
多波束聲吶系統(MBES)以獲取海底測點的高精度平面位置和水深為主,以獲取圖像信息為輔。現代側掃聲吶系統(SSS)在成像的同時也可給出同多波束聲吶系統一樣但位置精確度較差的全覆蓋水深,但以獲取高分辨海底圖像為主,以測深為輔[1]。
第2類是用于對近距離、小范圍區域進行成像的水聲成像系統,稱為微地貌探測系統,主要包括前視聲吶系統、聲透鏡系統等。
前視聲吶最初的用途是避障,主要用來保證水面船只、AUV和潛艇的航行安全,大部分水面船只和幾乎所有的水下潛器都安裝有前視避障聲吶系統。應用較多的主要是美國RESON公司的SeaBat系列產品,例如SeaBat 8128、SeaBat 7128(見圖1)、SeaBat 6012等。
聲透鏡系統利用聲透鏡對聲波的聚焦原理與光學透鏡對光波的聚焦原理相同,可以獲得類似于光學成像的圖像。我們選用DIDSON 300 m(見圖2)進行近距離水下觀測實驗。

圖1 SeaBat 7128多波束前視聲吶

圖2 DIDSON 300 m實物照片
2 聲吶成像對渾水中船舶等的觀察檢測
20世紀70年代末多波束測深技術出現以來,在海底地形測量和江河湖泊水下測繪中都得到了廣泛應用。不僅實現了測深數據自動化和在外作業準實時繪制測區水下彩色等深圖,而且還可利用多波束聲信號成像,提供直觀的測時水下形態,如探測水中魚雷、中華鱘、沉船、大壩水下探傷和檢測船舶吃水深度等。
我們采用SeaBat 7128多波束前視聲吶和DIDSON透鏡聲吶,對渾水中的船舶進行了水下觀察檢測試驗研究,以期解決渾水條件下船舶水下觀察檢測難題。
2.1SeaBat7128多波束前視聲吶觀察檢測情況
SeaBat 7128聲吶系統由連接控制單元(LCU)、7-P聲吶處理單元(SPU)、EM7200雙頻接收單元、TC2162雙頻發射單元和水密電纜等5部分組成,參見圖3。

圖3 SeaBat 7128組成圖
2.1.1 實驗室觀測實驗
在開展以上聲吶圖像處理技術理論研究的同時,本項目利用從國外購買的美國RESON公司生產的SeaBat 7128多波束成像聲吶,開展了不同距離、不同水深和不同角度下的實驗室觀測研究。
實驗環境為室內水池(長8 m,寬8 m,深10 m);實驗設備為SeaBat 7128 多波束前視聲吶;目標類型為浮梯(長5 m,寬1 m)。圖4為部分典型探測成像結果。
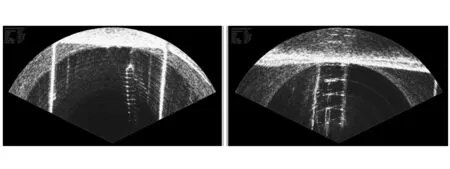
圖4 SeaBat 7128探測距離8 m成像結果圖
實驗表明,SeaBat 7128多波束成像聲吶能夠對距離1~5 m、水深1~10 m的不同角度下的目標進行有效觀測,但是目標與聲吶頭之間的相對角度會對觀測結果帶來影響。
2.1.2 實船觀測試驗
采用SeaBat 7128多波束成像聲吶進行了渾水條件下的碼頭實船觀測實驗,實驗環境及觀測結果見圖5、圖6。
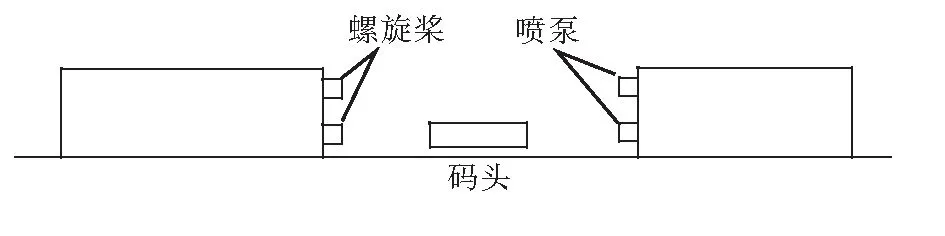
圖5 實驗環境示意圖

圖6 SeaBat 7128多波束成像聲吶碼頭觀測結果圖
實驗結果表明,SeaBat 7128多波束成像聲吶能夠在渾水條件下對距離8~150 m、水深1~10 m的不同角度下的目標進行觀測。對于噴泵和螺旋槳目標,有效觀測距離可以達到100 m以上;當目標距離小于20~30 m,可以檢測并識別出噴泵和螺旋槳目標。
2.2DIDSON透鏡聲吶觀察檢測情況
觀察分析SeaBat 7128多波束成像聲吶獲取的圖像,不難看出:在渾水條件下,其用于大范圍搜尋和發現目標更為有效,近距離觀測目標的詳細信息則受各種條件的限制。理論上說,它可以在一定范圍內對家用墻磚大小的物體進行準確識別,但實際應用中,對不同材質和特殊形狀的未知目標,很難達到理想的觀察效果,近距離觀測目標透鏡聲吶更為有效。
DIDSON 使用聲學透鏡技術,可以說是一臺水下聲學攝像機,可以形成清晰的物體圖像,具有體積小、重量輕、可由潛水員攜帶,可用于蛙人、魚群、漂浮物等水中目標的探測、顯示與記錄;水雷等水底目標的探測、顯示與記錄。
在同樣條件下,用DIDSON透鏡聲吶進行比較實驗,可以較清晰地觀測到螺旋槳等實驗目標,成像效果明顯優于SeaBat 7128多波束成像聲吶。
圖7為實驗室試驗觀測到的水下平臺金屬網格聲吶成像照片,圖8為實船實驗觀測到的船舶螺旋槳聲吶成像照片。
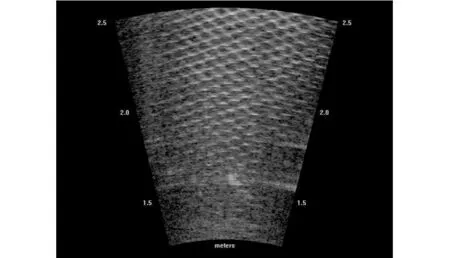
圖7 水下平臺金屬網格聲吶成像圖
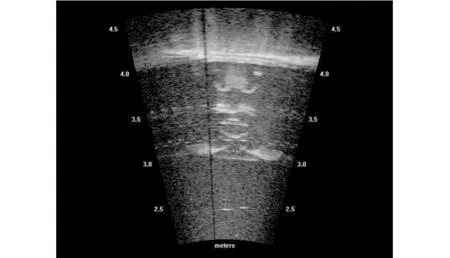
圖8 船舶螺旋槳聲吶成像圖
3 聲吶圖像后處理技術
水下環境中的噪聲干擾和混響干擾、海洋內部的不均勻特性都會使成像聲吶接收的原始聲圖像數據的質量急劇降低,因此,在實際應用中,需要采用聲吶圖像后處理技術,才能獲得幾乎可以和水下光學攝像機相比擬的圖像效果。同時,為了保證后期目標識別的準確性,也有必要進行適當的圖像處理和分析。
3.1聲吶圖像特點
聲吶圖像實質上是接收的聲回波能量在平面內的分布,屬于二維空間信號,這一點與光學圖像類似;但是,各種外在因素的影響使聲吶圖像的質量遠不如光學圖像。
1)聲吶圖像受噪聲影響嚴重,對比度較低。水下復雜的環境中,海洋環境噪聲、艦船自噪聲等是普遍存在的,這些噪聲在聲吶圖像中表現的灰度級比較豐富,而目標灰度級相對較少。
2)海洋中大量存在的懸浮顆粒、不均勻結構等使聲波發生散射,一定程度上也影響了聲波的傳播距離及成像質量,使聲吶圖像強度非均勻,某些物體邊緣被弱化。
3)受聲基陣性能的限制,聲吶圖像的分辨率往往不高。
3.2聲吶圖像處理算法
聲吶圖像的這些特點給后續處理帶來許多困難,需要合理選擇聲吶圖像處理算法。根據處理目的不同,目前的聲吶圖像處理算法可大致分為預處理、圖像分割、目標特征提取與識別。
這幾類算法通常需要配合使用來達到理想的處理效果,例如進行圖像分割之前大都需要對原始圖像進行去噪處理,提高圖像信噪比目標特征的正確提取則建立在圖像合理分割的基礎上。
實際研究過程中,我們在MATLAB環境下,將適用于渾水中艦船水下觀察檢測的圖像處理方法整合并制作了圖像處理軟件,作為多波束聲吶圖像后處理的平臺,對聲吶圖像進行后續處理,正確評估船舶水下技術狀況。
4 局部清水觀察檢測
用現有的聲吶成像設備是難以觀察檢測船體、螺旋槳和舵等水下裝置表面焊縫、裂紋等。在相同渾水水域,我們采用在攝像或照相裝置前加裝清水箱或清水袋等裝置形成局部清水檢測系統,對船體、螺旋槳和舵等水下裝置表面焊縫、裂紋等細節進行緊貼裝置表面檢測,從而獲得光學圖像信息。從拍攝到的船體表面光學成像圖像觀察,焊縫清晰可見。
5 結束語
多波束聲吶成像系統是目前水下地形測量的最主要海洋儀器之一,是主要用于大面積、大深度掃海測量的水下聲吶成像系統;聲透鏡系統利用聲透鏡對聲波的聚焦原理與光學透鏡對光波的聚焦原理是一樣的,可以得到類似于光學成像的圖像,是用于近距離、小范圍區域進行成像的水下聲學成像系統。
通過大面積、大深度掃海測量聲吶成像系統(如:Seabat 7128)和近距離、小范圍區域進行成像的成像系統(如:透鏡聲吶)的研究,解決了在寬闊水域(特別是渾水水域)遠距離目標發現,近距離目標觀察的難題,配合水下攝像機(照相機或ROV)采用局部清水法貼面檢測船體(或螺旋槳等水下裝置)表面裂紋等狀況,由此構建了水下(特別是渾水條件下)遠距離、近距離和貼近表面一整套檢測體系,可有效解決船舶水下渾水觀察檢測難題。
水聲成像技術不僅可以在渾水條件下對在航船舶水下觀察檢測中應用,而且在水下探測領域中,對水雷、蛙人、水下潛器等靜止和運動目標的大范圍搜尋、檢測識別和定位跟蹤等領域也具有廣泛的應用前景。
[1]陽凡林,吳自銀,獨知行,等.多波束聲吶和側掃聲吶數字信息的配準及融合[J].武漢大學學報,2006,31(8)740-743.
This paper mainly studied the application technology of underwater multi-beam imaging observation.Methods of multi-beam sonar imaging, acoustic lens sonar imaging and local clear water imaging are used.In the muddy water,the underwater observation and detection of the ship target are carried out in order to build a system of ship launching on detection of muddy water conditions.
underwater detection;sonar image;ship
U672
10.13352/j.issn.1001-8328.2015.06.011
張文瑤(1963-),男,遼寧撫順人,高級工程師,大學本科,主要從事艦船維修保障工作。
2015-08-26
猜你喜歡
艦船科學技術(2022年14期)2022-09-22 03:07:40
工業設計(2022年8期)2022-09-09 07:43:20
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
船舶(2021年4期)2021-09-07 17:32:22
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
小哥白尼(趣味科學)(2019年10期)2020-01-18 09:16:22
家庭影院技術(2017年9期)2017-09-26 03:41:45