編碼器正余弦信號細分技術(shù)應(yīng)用研究
2015-11-26 09:28:08張道勇黃楊根張輝
機床與液壓 2015年16期
關(guān)鍵詞:信號
張道勇,黃楊根,張輝
(1.廣州數(shù)控信息科技有限公司,廣東廣州510530;2.廣東第二師范學(xué)院物理系電子教研室,廣東廣州510303)
在高精度、高動態(tài)性能要求的伺服系統(tǒng)中,通常采用輸出正余弦信號的位置檢測元件,如圓光柵、旋轉(zhuǎn)編碼器等,用于位置和速度反饋。工程應(yīng)用中,由于受到碼盤加工工藝、電源波動、環(huán)境溫度變化、讀數(shù)頭的非線性等因素的影響,位置檢測元件輸出的正余弦編碼器信號常具有直流電平誤差、幅值誤差和正交相位誤差[1]、諧波分量誤差、噪聲誤差等[2],直接影響伺服控制系統(tǒng)的精度和可靠性。如何對正余弦編碼器輸出的角位置信號誤差進行有效的修正和補償,采用合適的插值方法從正余弦信號中提取出高分辨率的位置信息,以滿足伺服系統(tǒng)的高精度控制要求,具有重要的研究和應(yīng)用價值。
為了提高正余弦編碼器的測量精度,需求解當前位置在其正余弦信號周期內(nèi)的精確相位來獲得更高的精度,該求解相位的方法即為細分技術(shù)。常用的細分方法有正切直接計算法[3]、閉環(huán)跟蹤法[4]、CORDIC算法[5]、信號注入法[6]、相位編碼細分算法[7]和麥克勞林級數(shù)法[8]等。
文中主要研究編碼器正余弦信號的細分技術(shù),側(cè)重于工程應(yīng)用,以提高伺服系統(tǒng)的測速范圍和位置測控精度。選用HENGSTLER RS53正余弦編碼器,結(jié)合13位弦波信號插補細分芯片iC-NQI[9]和HEIDENHAIN ND281B數(shù)顯裝置,搭建了高精度交流伺服驅(qū)動測控裝置實驗平臺。使用可編程邏輯器件FPGA和硬件描述語言VHDL,實現(xiàn)串行BISS[10](Bidirectional Synchronous Serial)通信協(xié)議對iC-NQI芯片的初始化寄存器配置,并實時讀出數(shù)字化的正余弦編碼器當前速度和絕對值角度、位置值。
1 系統(tǒng)體系結(jié)構(gòu)及主要功能
高精度交流伺服驅(qū)動測控裝置實驗平臺,體系結(jié)構(gòu)如圖1所示。

圖1 交流伺服驅(qū)動系統(tǒng)裝置體系結(jié)構(gòu)原理框圖
其中,CNC控制器經(jīng)由GSK-Link工業(yè)以太網(wǎng)總線向主軸伺服驅(qū)動單元發(fā)出速度、位置指令,驅(qū)動單元采用實時測角的方法實現(xiàn)對位置信號的采集和旋轉(zhuǎn)軸位置環(huán)的閉環(huán)控制。采用iC-NQI和HEIDENHAIN ND281B角度測量值數(shù)顯裝置對轉(zhuǎn)軸位置同時進行檢測并記錄所測角位置數(shù)據(jù),以數(shù)顯裝置的測量值為理想值來檢測和驗證iC-NQI器件細分性能效果和應(yīng)用可靠性。
2 插補細分芯片iC-NQI
iC-NQI是德國iC-Haus公司推出的一款13位模擬弦波信號數(shù)字化專用集成器件,基于動態(tài)跟蹤(Count-safe Vector Follower Principle)細分技術(shù),可將傳感器輸出的正余弦信號轉(zhuǎn)換為可選精度和延遲的角度位置數(shù)據(jù),輸入弦波信號頻率可達250 kHz。芯片內(nèi)部集成有可編程儀表放大器,可設(shè)定轉(zhuǎn)換精度、轉(zhuǎn)換速度、模擬信號校準參數(shù)、輸出接口模式等,功能強大,性能優(yōu)良。作者利用該器件實現(xiàn)了高分辨率、高速度的角度、位移測量、控制系統(tǒng)。編碼器輸出的正余弦信號,經(jīng)調(diào)理、濾波電路后,輸入iCNQI進行轉(zhuǎn)換,應(yīng)用原理圖如圖2所示。
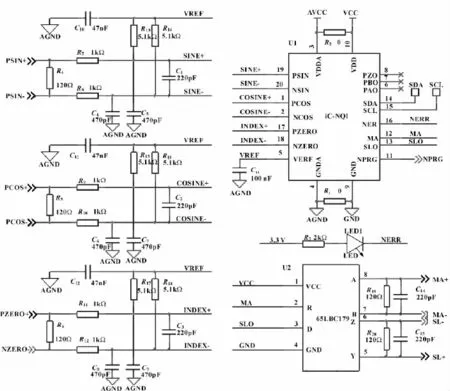
圖2 iC-NQI應(yīng)用電路原理圖
電路未接EEPROM存儲器。為減少電磁干擾,正余弦細分盒與伺服驅(qū)動單元信號均采用差分輸出,并使用屏蔽雙絞線電纜傳輸。
iC-NQI器件各參數(shù)由相應(yīng)的位段設(shè)置,具體設(shè)定功能有:
(1)模擬信號的設(shè)定參數(shù):GAIN、SINOFFS、COSOFFS、REFOFFS、RATIO、PHASE;
(2)轉(zhuǎn)換功能設(shè)定參數(shù):SELRES、HYS、FCTR;
(3)信號檢測和錯誤信息設(shè)定參數(shù):SELAMPL、AMPL、AERR、FERR;
(4)器件測試功能設(shè)定參數(shù):TMODE、TMA;
(5)A、B相輸出信號設(shè)定參數(shù):CFGABZ、ROT、CBZ、ENRESDEL、ZPOS、CFGZ、CFGAB;
(6)BISS接口設(shè)定參數(shù):CFGTOS、CFGTOR、CFGSSI、BISSMOD、SELSSI、M2S、RPL。
iC-NQI芯片內(nèi)有多個可編程D/A轉(zhuǎn)換器,可設(shè)置傳感器輸出的正弦波信號的偏移、放大倍數(shù)和相位誤差等,借助強大的上位機軟件 (iC-Haus SinCosYzer?Workstation)可以測量和分析直流電平偏置、幅值、相位3種誤差,然后采用將修正值寫入數(shù)字電路寄存器的方式進行調(diào)整、補償。轉(zhuǎn)換后的輸出數(shù)據(jù)由以下位段組成:3~13位的角度轉(zhuǎn)換值;0、8、12、24位的弦波周期計數(shù)值;2位的錯誤信息;5或6位CRC校驗值。此設(shè)計中,主時鐘頻率10 MHz,采用12位弦波周期計數(shù)值,10位角度轉(zhuǎn)換值,每進行一次角度、位置采樣時間為10μs左右,大大提高了系統(tǒng)的精度和響應(yīng)速度。
3 實驗結(jié)果及分析
3.1 定位精度測試
為了檢測旋轉(zhuǎn)軸的定位精度,伺服驅(qū)動器按照每隔2°的角度進行一次定位,每次共定位181個位置完成一個圓周。正向旋轉(zhuǎn)3個圓周,反向旋轉(zhuǎn)3個圓周。NC程序如下:
(1)電主軸前端向后端看過去,逆時針旋轉(zhuǎn):
G01 H-2 F500;
(2)電主軸前端向后端看過去,順時針旋轉(zhuǎn):
G01 H2 F500;
利用ND281B數(shù)顯裝置測試其轉(zhuǎn)動角度,將各個角位置的誤差值記錄下來,測試結(jié)果如圖3所示。可以看出旋轉(zhuǎn)軸的誤差呈現(xiàn)出一種波動的特性,但誤差范圍均在0.005°(18")以內(nèi)。

圖3 旋轉(zhuǎn)軸 (C軸)定位誤差分布圖
3.2 重復(fù)定位精度測試
為了檢測旋轉(zhuǎn)軸的重復(fù)定位精度,伺服驅(qū)動器在4個任意位置,正向旋轉(zhuǎn)定位5次,反向旋轉(zhuǎn)定位5次,NC程序如下:
(1)電主軸前端向后端看過去,逆時針旋轉(zhuǎn):
G01 H-360 F2 000;
(2)電主軸前端向后端看過去,順時針旋轉(zhuǎn):
G01 H360 F2 000;
利用ND281B數(shù)顯裝置測試其前進距離,并算出每次定位重復(fù)性誤差,記錄下來,測試結(jié)果如圖4所示。取測試最大的誤差作為系統(tǒng)的重復(fù)定位精度,可知旋轉(zhuǎn)軸重復(fù)定位精度在0.001°(3.6")以內(nèi)。
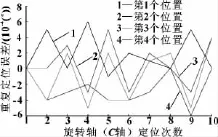
圖4 旋轉(zhuǎn)軸 (C軸)重復(fù)定位精度誤差分布圖
4 結(jié)論
選用HENGSTLER RS53正余弦編碼器,結(jié)合13位弦波信號插補細分芯片iC-NQI和 HEIDENHAIN ND281B數(shù)顯裝置,搭建了高精度交流伺服驅(qū)動測控裝置實驗平臺。試驗結(jié)果表明:iC-NQI器件運行平穩(wěn),性能可靠,系統(tǒng)定位精度可達到0.005°(18"),重復(fù)定位精度可達到0.001°(3.6"),滿足高分辨率、高動態(tài)性能伺服運動控制的要求,在高精度、高速度數(shù)控機床加工等行業(yè)領(lǐng)域中具有重要的實際應(yīng)用價值。
[1]KRAH J O,SCHMIRGEL H.FPGA Based Sine-Cosine Encoder Feedback Processing for Servo Drive Applications[C]//International Exhibition& Conference for Power E-lectronics Intelligent Motion Power Quality 2007.Nuremberg,Germany:Mesago PCIM GmbH,2007.
[2]王顯軍.光電軸角編碼器細分信號誤差及精度分析[J].光學(xué)精密工程,2012,20(2):379-386.
[3]CHARLESF Lepple.Implementation of a High-speed Sinusoidal Encoder Interpolation System[D].Virginia Polytechnic Institute and State University,2004.
[4]吳立,羅欣,沈安文,等.基于閉環(huán)跟蹤法的正余弦編碼器細分技術(shù)[J].計算機技術(shù)與自動化,2011,30(4):5-8.
[5]盧少武,唐小琦,馬澤龍.CORDIC算法在光柵莫爾條紋細分中的應(yīng)用[J].自動化儀表,2010(5):23-25.
[6]洪小圓,王鹿軍,呂鄭宇.一種新穎的正弦正交編碼器細分方法[J].電源學(xué)報,2011(1):12-15.
[7]陳曉榮.增量式編碼器的相位編碼細分研究[J].儀器儀表學(xué)報,2007,28(1):132-135.
[8]劉海龍.麥克勞林級數(shù)法求取光電編碼器轉(zhuǎn)子位置算法[J].傳感技術(shù)學(xué)報,2013,26(5):616-621.
[9]iC-Haus.iC-NQI Technical Datasheet[M].Rev A2,2011.
[10]iC-Haus.Biss Interface Protocol Description(C-Mode)[M].2008.
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
媽媽寶寶(2019年10期)2019-10-26 02:45:34
中國生殖健康(2019年3期)2019-02-01 06:12:26
鐵道通信信號(2018年11期)2019-01-19 01:15:08
電子制作(2018年11期)2018-08-04 03:25:42
鐵道通信信號(2018年2期)2018-04-18 12:18:10
鐵道通信信號(2016年11期)2016-06-01 12:11:32
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
中國病理生理雜志(2015年8期)2015-12-21 12:38:06
