基于adam s與simulink的六桿機構數值分析研究
2015-11-30 08:19:50曹衛鋒
裝備制造技術 2015年11期
關鍵詞:分析
曹衛鋒
(榆林學院能源工程學院,陜西 榆林 719000)
平面連桿機構是由低副連接剛性構件而成的機構,它具有結構簡單,制造容易,便于潤滑,磨損小等優點,被廣泛的用于各種機械與儀表中。不論是設計新的連桿機構和分析已有的機構,都需要首先進行運動學分析。解析法可以精確分析連桿機構的運動學參數,已成為主要的分析方法。解析法一般先利用復數向量法建立機構的位置模型,然后進一步得到速度與加速度的分析模型,通過對模型進行數值求解,得到運動學參數。隨著機械系統動力學與虛擬樣機技術的發展,出現了機械系統動力學數值分析方法及其軟件ADAMS.利用該方法可以程式化地建立機構的三維虛擬樣機模型,對模型求解,就可以得到機構的靜力學、運動學和動力學參數[1,2]。六桿機構應用廣泛,是構成其機械裝置與平面多桿機構的基礎[3]。本文通過兩種方法建立六桿機構的動力學模型,求解分析運動學參數,對比研究兩種方法在建模效率、分析結果、分析效率等方面的差異。
1 數值解析法
解析法主要步驟包括建立機構的位置方程,將位置方程對時間求導得到機構的速度加速度方程兩步。解析法的方法也很多,復數矢量法便是其中的一種,這種方法將機構看作一個封閉的矢量多邊形,然后用復數形式表示該機構的封閉矢量方程式,最后向所建立的直角坐標系投影各個矢量方程[4]。
1.1 運動學模型的建立
如圖1所示的牛頭刨床的機構運動簡圖,各構件的尺寸為:L1=125 mm,L3=600 mm,L4=150 mm,L6=275mm,原動件的轉角 θ1=0~360°和等角速度ω1=1 rad/s.
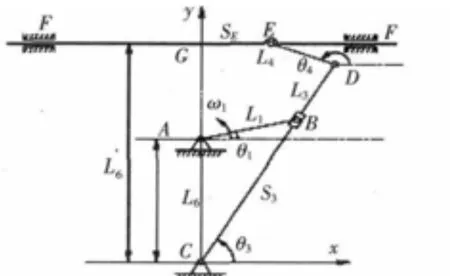
圖1 六桿機構圖
六桿機構的閉環矢量方程如式(1)所示:

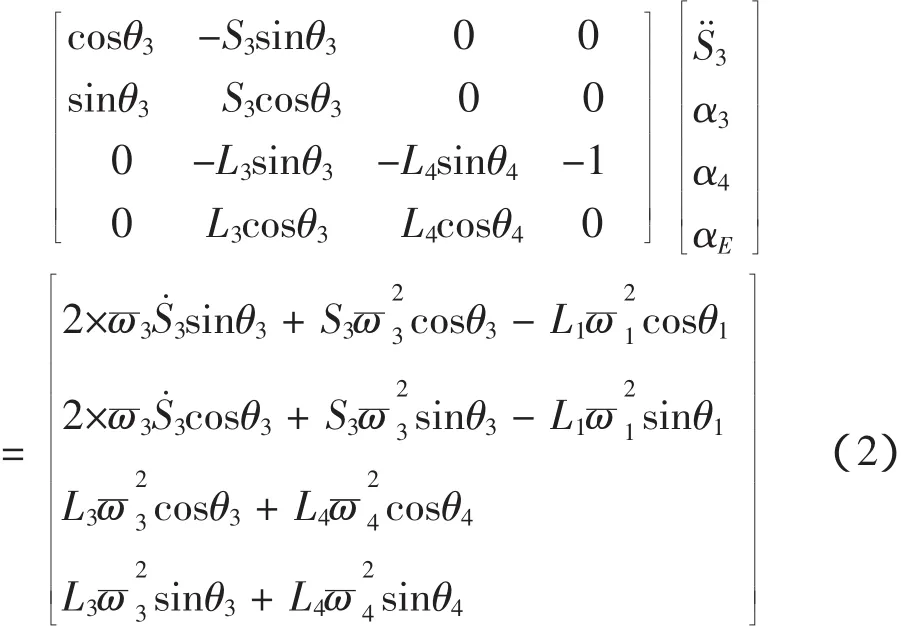
分別將矢量方程投影到x軸和y軸上得到運動學的位置方程,對位置方程求導兩次得到加速度方程式,寫成矩陣的形式,如式(2)所示。
1.2 simulink分析求解
對解析法得到的分析模型,通過編制matlab加速度分析函數[5],利用積分模塊,函數模塊等建立simulink模型,如圖2所示。設置積分常數,運行求解,就可以得到各個構件的運動學參數。滑塊的加速度,連桿3與4的角加速度的時間歷程曲線如圖3所示。
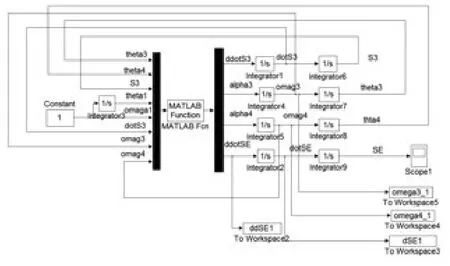
圖2 simulink仿真模型
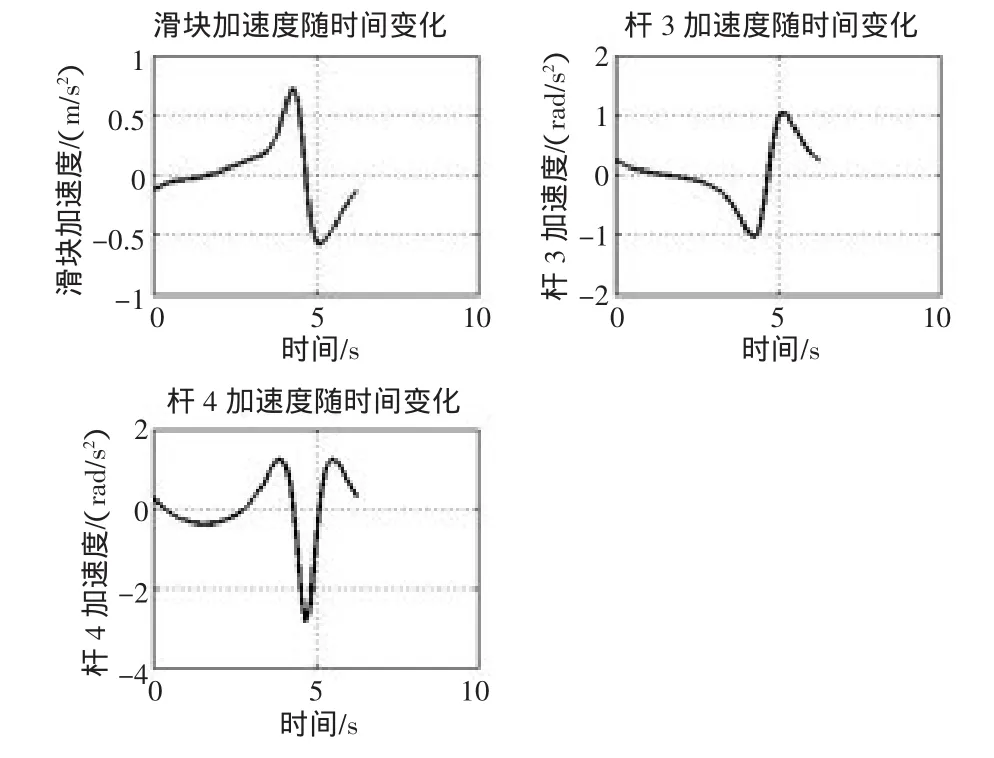
圖3 構件的加速度時間歷程(MATLAB)
2 連桿機構的ADAMS分析
2.1 ADAMS分析模型的建立
桿長參數、初始條件與解析法相同,在ADAMS中建立連桿機構的分析模型如圖4所示。

圖4 六桿機構的ADAMS仿真模型
2.2 仿真分析
設置仿真時間為6.28 s,輸出630個時間步,仿真類型為運動學仿真,然后開始仿真。仿真得到各構件的加速度的時間歷程曲線如圖5所示。
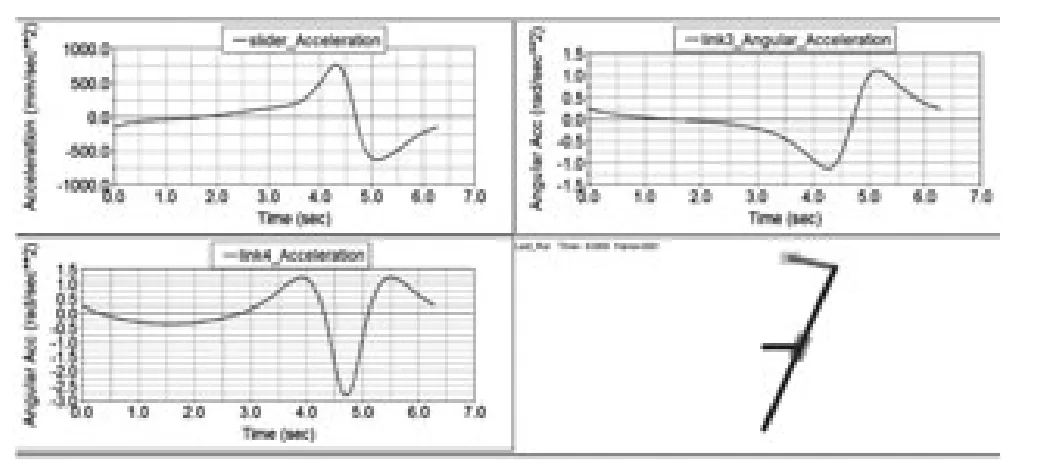
圖5 連架桿R4的角加速度時間歷程(ADAMS)
3 兩種方法的比較分析
限于篇幅,本文把兩種分析方法得到滑塊的速度與加速度的時間歷程曲線分別如圖6與圖7所示,由圖可知:兩種分析結果比較接近,只是在最大值處差異稍大。為了進一步精確的研究兩種分析方法的差異,定義相對誤差為 E=(M-A)/M,式中:M為MATLAB求解的結果;A為ADAMS求解結果,每隔0.5 s計算相對誤差。從結果可知:滑塊速度的最大相對誤差為4.82%,加速度最大相對誤差為7.04%,兩者的最大相對誤差均不超過8%,差異不大。
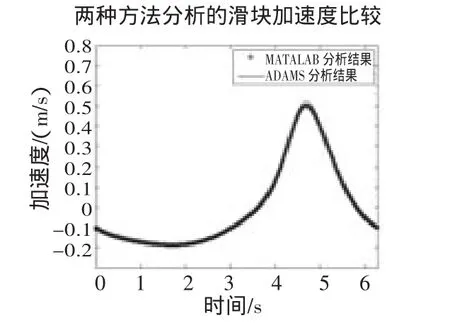
圖6 兩種分析方法滑塊速度比較圖
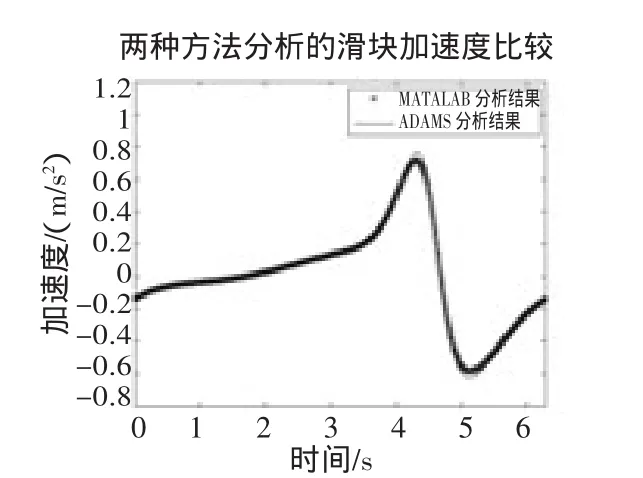
圖7 兩種分析方法滑塊加速度比較圖
4 結束語
本文主要是采用MATLAB解析法和ADAMS虛擬樣機技術分別建立了平面六桿機構的動力學分析模型。對該連架桿的速度與加速度進行了分析,比較了兩種分析方法的結果,結果表明兩種方法的分析結果差異較小,最大相對差異不超過8%.虛擬樣機技術具有建模迅速,不需要進行數學推導的優點,采用該方法可以提高分析的效率。解析法和虛擬樣機方法得到的計算結果比較接近,說明解析法和虛擬樣機方法建模的正確性,借助虛擬樣機方法提高了設計的效率和成功率。
[1]呂鯤,袁 揚,郭 東.牛頭刨床六桿機構的優化設計及仿真[J].機械傳動,2013,37(3):52-55.
[2]陳立平.機械系統動力學分析及ADAMS應用教程[M].北京:清華大學出版社,2005.
[3]鹿躍麗.牛頭刨床六桿機構的優化設計[J].鄭州工業大學學報,1999,20(3):39-41.
[4]王 栗,覃 嶺,阮衛平,等.機械式壓力機曲柄六桿機構運動學特性分析[J].機械傳動,2011,35(1):59-61.
[5]李龍海.基于SIMULINK的平面六桿機構仿真分析[J].機械設計與制造,2009,10(1):154-156.
猜你喜歡
現代畜牧科技(2021年9期)2021-10-13 06:39:14
民用飛機設計與研究(2020年4期)2021-01-21 09:15:02
電子制作(2018年18期)2018-11-14 01:48:24
山東工業技術(2016年15期)2016-12-01 05:31:22
當代經濟研究(2016年5期)2016-12-01 03:12:05
現代農業(2016年5期)2016-02-28 18:42:46
出版與印刷(2016年3期)2016-02-02 01:20:11
中國中醫藥現代遠程教育(2014年11期)2014-08-08 13:23:44
華北水利水電大學學報(社會科學版)(2014年3期)2014-04-16 04:38:31
終身教育研究(2014年5期)2014-02-28 01:23:06