機械松動現(xiàn)象與故障特性研究綜述
2015-12-03 12:20:30曹青松熊國良
噪聲與振動控制 2015年2期
曹青松,向 琴,熊國良
(華東交通大學(xué) 機電工程學(xué)院,南昌 330013)
機械松動現(xiàn)象與故障特性研究綜述
曹青松,向 琴,熊國良
(華東交通大學(xué) 機電工程學(xué)院,南昌 330013)
松動現(xiàn)象廣泛存在于機械系統(tǒng)中,包括基礎(chǔ)松動、支座松動及部件間配合松動。為此舉例說明了三類松動的故障成因,歸納了國內(nèi)外研究中常見的幾種松動模型,從松動故障的動力學(xué)建模、求解方法及其非線性動力學(xué)特性等方面,對單一松動、松動—碰摩耦合、松動—裂紋耦合、兩端支座松動、質(zhì)量慢變系統(tǒng)松動與雙跨轉(zhuǎn)子系統(tǒng)松動等六類松動問題的研究現(xiàn)狀進行了闡述,并簡要介紹了松動實驗的研究現(xiàn)狀。最后,對松動故障研究中的關(guān)鍵問題或進一步研究課題進行了展望。
振動與波;機械松動;故障特性;轉(zhuǎn)子系統(tǒng);非線性振動
松動是一種常見的機械故障現(xiàn)象,往往是由機械安裝質(zhì)量不高及長期振動所引起的,其在系統(tǒng)基礎(chǔ)、支承模塊、內(nèi)部部件及殼體等任何有連接的部位都可能發(fā)生。松動故障的存在嚴(yán)重影響著機械系統(tǒng)的正常運行,甚至導(dǎo)致安全事故的發(fā)生。然而,松動故障癥兆通常又與不平衡、不對中等故障類似,易造成故障誤判,對于耦合故障就更加難以診斷。因此,有必要對松動故障類型、松動機理、故障特征以及早期診斷進行研究。國內(nèi)外學(xué)者已經(jīng)針對松動現(xiàn)象建立了多種不同的簡化松動模型,并且針對不同工作狀態(tài)、不同松動情況下的系統(tǒng)動力學(xué)特性進行了較為的廣泛研究。
在上述研究背景的基礎(chǔ)上,本文擬分析松動主要類型及其可能發(fā)生的故障形式,綜述松動模型、故障特性及實驗研究等內(nèi)容,并對松動故障及其診斷的進一步研究進行展望。
1 松動類型
高金吉院士總結(jié)國內(nèi)外典型故障診斷案例,將旋轉(zhuǎn)機械一次故障原因分為10類45種,其中,第一類的第七種與第三類的第一到三種以及第五種均可直接導(dǎo)致松動故障[1]。機械松動故障形式多樣,本文按故障發(fā)生位置不同將機械松動分為三類:
①基礎(chǔ)松動:主要包括機床安裝地基剛性差、墊鐵松動、地腳螺栓松動以及灌漿惡化或破碎等。
其故障癥兆主要表現(xiàn)為振動方向性比較固定,振動頻譜中以工作轉(zhuǎn)頻占主導(dǎo)。此類故障在工程現(xiàn)場經(jīng)常發(fā)生,浙江一電廠發(fā)電機組的風(fēng)機軸承座螺栓選用不規(guī)范,且二次灌漿混凝土標(biāo)號未達設(shè)計要求,結(jié)構(gòu)松散,運行一段時間后地腳螺栓松動,導(dǎo)致軸承內(nèi)圈與大軸膠合[2]。某煤礦用輪斗系統(tǒng)的回轉(zhuǎn)減速機地腳螺栓緊力不足,又承受反復(fù)的大作用力沖擊,導(dǎo)致螺栓松動,擠壓螺孔,形成基孔變形,變成橢圓的基孔更不易固定,使故障惡性循環(huán)[3]。
②支座松動:包括支撐腳不等長引起的晃動、結(jié)構(gòu)或軸承座裂紋、軸承座或支撐座固定螺栓未充分預(yù)緊或松動等,經(jīng)常發(fā)生在長期承受扭矩的機械支承結(jié)構(gòu)處。
其故障癥兆主要表現(xiàn)為振動相位不穩(wěn)定,2倍工作轉(zhuǎn)頻的振動幅值大于1倍工作轉(zhuǎn)頻振動幅值的50%[4]。用于卸煤的某型翻車機,其傳動齒輪工作載荷大,且長期受交變翻轉(zhuǎn)力矩作用,使得其軸承座螺栓預(yù)緊力減小,聯(lián)接失效,導(dǎo)致松動[5]。導(dǎo)彈支撐座在復(fù)雜的環(huán)境激勵下易發(fā)生聯(lián)接螺栓松動故障,此類故障會給導(dǎo)彈未知的初始擾動,可能造成導(dǎo)彈失控[6]。
③部件間配合松動:包含軸承外圈相對于軸承襯套松動、軸承內(nèi)圈相對于軸松動、軸承座中的軸承襯套松動、過大的軸承內(nèi)部游隙、軸系上的轉(zhuǎn)子松動等現(xiàn)象。
其故障癥兆主要表現(xiàn)為趨向于在松動方向的定向振動,振動頻譜中同時存在高次諧波與亞次諧波等多種復(fù)雜成分[4]。此類松動在工程應(yīng)用中最為常見的是軸承跑內(nèi)外圈。廣州一發(fā)電廠的高壓電動機滾動軸承出現(xiàn)了內(nèi)圈甩出故障,故障原因是由于軸頸磨損造成緊配合不足,軸承運轉(zhuǎn)時內(nèi)圈熱膨脹,隨即產(chǎn)生松動[7]。在鐵路運輸中列車軸箱軸承內(nèi)圈松動是最常見的故障之一,內(nèi)圈與車軸軸頸的配合緊密度遭到破壞造成相對滑移,軸頸表面遭到破壞并急劇升溫,甚至導(dǎo)致熱切軸事故[8]。
2 松動模型
松動模型是用來描述機械系統(tǒng)松動故障現(xiàn)象的數(shù)學(xué)形式,最為常見的一種是一端松動的簡單單圓盤Jeffcott轉(zhuǎn)子模型,如圖1所示,m為轉(zhuǎn)子圓盤等效集中質(zhì)量,k為彈性軸剛度,c為圓盤處阻尼系數(shù),e為圓盤偏心距,2α為松動間隙。系統(tǒng)的運動微分方程為
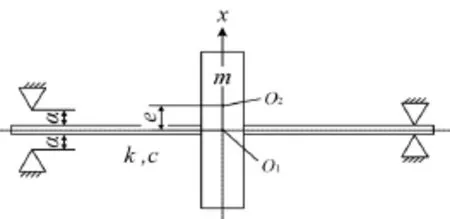
圖1 Jeffcott轉(zhuǎn)子系統(tǒng)松動簡圖

其中

式中k1為軸端振動小于松動間隙時的系統(tǒng)剛度,k2為軸端振動大于松動間隙,發(fā)生機械碰撞時的系統(tǒng)剛度,F(xiàn)為系統(tǒng)振動外擾激勵力。
隨著研究的深入,式(1)已無法滿足復(fù)雜工程應(yīng)用的需求,對于多自由度、慢變轉(zhuǎn)子質(zhì)量以及不同支承形式的轉(zhuǎn)子系統(tǒng),需要建立能夠更為準(zhǔn)確地描述系統(tǒng)松動機理的模型。國內(nèi)外學(xué)者通過分析各系統(tǒng)中m,c,k,F(xiàn)等參數(shù)的物理意義,建立了多種改進的松動模型。
2.1 多自由度系統(tǒng)松動模型
式(1)為單自由度系統(tǒng)振動方程,僅考慮了松動故障時轉(zhuǎn)子系統(tǒng)豎直方向上的振動。另一種常見的松動模型如圖2所示,系統(tǒng)一端支座松動,考慮轉(zhuǎn)子m在x和y兩個方向、松動支座M在y方向的振動位移,以及各部件間的相對位移與作用力,建立出多自由度的系統(tǒng)運動微分方程組。
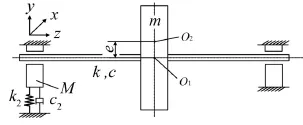
圖2 轉(zhuǎn)子系統(tǒng)支座松動簡圖
2.2 質(zhì)量慢變系統(tǒng)松動模型
一般情況下,轉(zhuǎn)子質(zhì)量m是一個恒定值,但對于離心機、翻斗機等類型的轉(zhuǎn)子系統(tǒng),由于物料分離,導(dǎo)致轉(zhuǎn)子質(zhì)量產(chǎn)生慢變,其慢變速度遠小于轉(zhuǎn)子的振動頻率,假設(shè)物料分離過程是連續(xù)的,可采用余弦規(guī)律來描述慢變轉(zhuǎn)子質(zhì)量m(τ)

式中m0為轉(zhuǎn)鼓質(zhì)量,λ為質(zhì)量變化幅值系數(shù),ω為轉(zhuǎn)子角速度,τ=εt(ε<<1)為慢變時間,ε為慢變時間系數(shù)。
2.3 連續(xù)剛度松動模型
式(2)為分段線性剛度松動模型,考慮系統(tǒng)振動與基座撞擊產(chǎn)生的剛度突變,此模型較為理想化。實際情況下,松動剛度并非瞬時階躍變化,而是隨振動幅值變化的非線性連續(xù)剛度,但此復(fù)雜機理尚未明晰,僅有少數(shù)研究者建立了簡單的連續(xù)松動模型
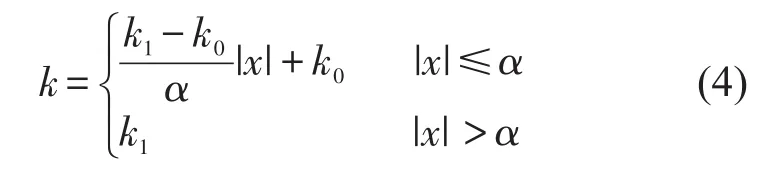
式中k1為基座剛度系數(shù),k0為軸的剛度系數(shù)。
另有學(xué)者[9]考慮含松動故障的剛度慢變系統(tǒng),此類系統(tǒng)具有參數(shù)慢變的特征,即系統(tǒng)的剛度隨著時間推移存在微小慢變,而松動也會引起剛度變化,則系統(tǒng)總剛度的變化同時依賴于其本身慢變特征和松動現(xiàn)象的共同作用

式中k1(τ1)為系統(tǒng)本身的剛度慢變,k2(τ2)為松動引起的系統(tǒng)剛度慢變,τ1=ε1t、τ2=ε2t為慢變時間,t為時間,ε1、ε2為慢變時間系數(shù)(ε1,ε2<<1)。
上述兩種模型較分段線性剛度模型雖有所改進,但仍與實際松動現(xiàn)象相差甚遠,松動剛度模型還需進一步研究。松動阻尼的變化規(guī)律與松動剛度基本一致,其數(shù)學(xué)模型相類似,在此不贅述。
2.4 典型對象松動模型
針對不同的研究對象,在建立動力學(xué)模型時所需考慮的受力有所差別,目前有以下幾種典型對象的松動模型。
1)兩端支承為滑動軸承系統(tǒng)的松動模型[10]。建立運動微分方程時主要考慮其作用于軸上的油膜力,油膜力的大小取決于軸承半徑、軸承長度及潤滑油粘度等系統(tǒng)特性參數(shù)。
2)兩端支承為滾動軸承系統(tǒng)的松動模型[11,12]。與1)的區(qū)別在于支承系統(tǒng)的外擾激勵力為滾動軸承對軸的彈性支承力,可根據(jù)非線性Hertz理論求得,由軸承類型、滾珠與滾道的接觸變形量決定。
3)立式轉(zhuǎn)子系統(tǒng)上、下導(dǎo)軸承松動模型,如水輪發(fā)電機組[13]。立式結(jié)構(gòu)與臥式機組在分析受力時有較大差別,由于是直立布置,導(dǎo)軸承對軸頸沒有徑向靜負荷,同時,需考慮止推軸承對的軸向作用,轉(zhuǎn)—定子軸向錯位產(chǎn)生的軸向磁拉力等。
4)雙跨轉(zhuǎn)子系統(tǒng)松動模型[14]。相對于單跨轉(zhuǎn)子系統(tǒng)具有更多自由度,建模時需考慮兩轉(zhuǎn)子系統(tǒng)間的相互作用。
5)松動與其他故障耦合模型。主要有松動—碰摩耦合、松動—裂紋耦合等故障模型,建模時需分別考慮碰摩力、裂紋開閉等作用因素。
3 幾種典型的松動故障研究
松動故障的研究是為了切合實際地描述出系統(tǒng)在松動故障下的量變與質(zhì)變過程,實現(xiàn)系統(tǒng)的早期故障診斷,預(yù)防事故發(fā)生。國內(nèi)外學(xué)者已就單一松動、松動—碰摩耦合、松動—裂紋耦合、兩端支座松動、質(zhì)量慢變系統(tǒng)松動以及雙跨轉(zhuǎn)子系統(tǒng)松動等六種典型故障進行了較為廣泛的研究。
3.1 單一松動故障
褚福磊等[15]研究了一端支座松動的轉(zhuǎn)子—滑動軸承系統(tǒng),采用分段線性剛度和阻尼的松動模型,通過數(shù)值仿真發(fā)現(xiàn)這類系統(tǒng)具有多種形式的周期、擬周期和混沌的復(fù)雜運動特性,還運用打靶法求出系統(tǒng)的振動周期解,并結(jié)合Floquet理論對解的穩(wěn)定性進行了判定。考慮到轉(zhuǎn)子系統(tǒng)中轉(zhuǎn)軸的應(yīng)力應(yīng)變關(guān)系通常為非線性函數(shù)關(guān)系,李宏坤等[16]建立轉(zhuǎn)子—滑動軸承動力學(xué)模型時,以線性項和立方項之和來表示轉(zhuǎn)軸的非線性彈性力,區(qū)別于普遍采用的線性彈性力。劉獻棟等[11]以轉(zhuǎn)子動力學(xué)、Hertz接觸理論和非線性動力學(xué)理論為基礎(chǔ),建立了轉(zhuǎn)子—滾動軸承系統(tǒng)支承松動故障動力學(xué)模型,分別利用Fourier變換和小波變換進行信號處理,不僅獲得了轉(zhuǎn)子—滾動軸承系統(tǒng)的松動故障特性,還證實了小波變換在松動故障診斷中的優(yōu)越性。陳果[12]建立了含支座松動故障的轉(zhuǎn)子—滾動軸承—機匣耦合系統(tǒng)動力學(xué)模型,通過數(shù)值仿真獲取了不同轉(zhuǎn)速、不平衡量、軸承座質(zhì)量以及支承剛度下的系統(tǒng)響應(yīng),發(fā)現(xiàn)在較大不平衡量和較小軸承座質(zhì)量下甚至出現(xiàn)超臨界轉(zhuǎn)速區(qū)域比臨界轉(zhuǎn)速區(qū)域更大的振動,較低機匣—基礎(chǔ)之間和軸承座—機匣的之間的連接剛度能夠降低系統(tǒng)響應(yīng)振幅。馬輝等[17]采用有限元法對工程中常見的一類軸承蓋松動故障建立了系統(tǒng)松動模型,并利用Ansys軟件進行仿真分析,得出軸承蓋松動故障的振動特性。Xiong等[18]針對含支承松動的偏心電機轉(zhuǎn)子系統(tǒng)開展研究,采用增量諧波平衡法對分段線性的松動模型進行求解,獲得了系統(tǒng)的近似周期解,并仿真分析了系統(tǒng)的故障特性。
由此可知,系統(tǒng)存在單一松動故障時的動力學(xué)特性研究已漸成體系,已從相對簡單的轉(zhuǎn)子—滑動軸承系統(tǒng)著手,一直發(fā)展到復(fù)雜的轉(zhuǎn)子—滾動軸承—機匣耦合系統(tǒng),通過對系統(tǒng)進行動力學(xué)建模,采用Runge-Kutta法、Newmark-β法、打靶法、漸進法和增量諧波平衡法等數(shù)值方法進行求解,分析系統(tǒng)的松動故障特性。
3.2 松動—碰摩耦合故障
轉(zhuǎn)子碰摩是旋轉(zhuǎn)機械的常見故障,即轉(zhuǎn)子與定子間的碰撞與摩擦。目前對于碰摩故障的研究較多,從簡單的單圓盤轉(zhuǎn)子模型靜碰摩機理的研究[19,20],到多圓盤轉(zhuǎn)子系統(tǒng)非線性動力學(xué)特性[21]與整周碰摩模擬實驗的研究[22],再到轉(zhuǎn)子系統(tǒng)反向全周碰摩的研究[23],碰摩故障理論已發(fā)展得較為深入。
碰摩故障使得旋轉(zhuǎn)機械受到周期性沖擊,誘發(fā)松動;而松動故障引起系統(tǒng)的周期性跳動,亦會導(dǎo)致碰摩。因此實際的轉(zhuǎn)子系統(tǒng)極可能同時具有松動與碰摩兩類故障,松動—碰摩耦合故障的特性研究十分必要。Muszynska與Goldman關(guān)于旋轉(zhuǎn)機械系統(tǒng)的動力學(xué)特性研究做了大量工作[24-26],對松動與碰摩耦合故障的橫向不平衡轉(zhuǎn)子系統(tǒng)進行了數(shù)值仿真,并利用轉(zhuǎn)子實驗臺對仿真結(jié)果進行了實驗驗證[27]。劉元峰等[28]以具有支承松動的Jeffcott轉(zhuǎn)子為研究對象,綜合考慮轉(zhuǎn)子系統(tǒng)的碰摩故障與基礎(chǔ)松動,創(chuàng)建了既包含碰摩力,又存在分段階躍剛度的轉(zhuǎn)子系統(tǒng)振動微分方程,并采用數(shù)值方法分析系統(tǒng)的分岔與混沌等非線性動力學(xué)特性。在此基礎(chǔ)上,羅躍綱等[29]研究了結(jié)構(gòu)相對復(fù)雜的轉(zhuǎn)子系統(tǒng),建立了多自由度的運動微分方程組,通過連續(xù)打靶法求出了非線性非自治系統(tǒng)的周期解,利用Floquet理論分析系統(tǒng)周期運動的穩(wěn)定性及不穩(wěn)定規(guī)律。除常見的臥式機構(gòu)外,黃志偉等[13]研究了立式機組—水輪發(fā)電機組軸系松動—碰摩耦合故障的動態(tài)響應(yīng),建立了上導(dǎo)軸承松動與轉(zhuǎn)子碰摩耦合故障情況下,具有六自由度的水輪發(fā)電機組軸系動力學(xué)模型。
大多數(shù)相關(guān)研究在分別考慮轉(zhuǎn)子系統(tǒng)碰摩、松動二者故障機理的基礎(chǔ)上,建立松動—碰摩耦合故障模型,通過改變系統(tǒng)頻率比、松動質(zhì)量、偏心量等參數(shù)來觀察系統(tǒng)松動—碰摩耦合故障特性。現(xiàn)有研究結(jié)果表明相對于單一松動故障,松動—碰摩耦合故障的系統(tǒng)響應(yīng)具有更豐富的低頻諧波分量。
3.3 松動—裂紋耦合故障
旋轉(zhuǎn)機械轉(zhuǎn)軸上出現(xiàn)裂紋,導(dǎo)致轉(zhuǎn)軸剛度的時變與不對稱,從而引發(fā)一系列復(fù)雜的動力學(xué)行為,裂紋轉(zhuǎn)子模型主要有兩類,假設(shè)轉(zhuǎn)軸剛度為隨裂紋開閉按余弦函數(shù)規(guī)則變化的方波模型,及考慮軸剛度、裂紋開閉和轉(zhuǎn)軸位移三者耦合的非線性渦動模型。Yang等[30]采用適當(dāng)?shù)牧鸭y開閉模型,導(dǎo)出固定坐標(biāo)系中裂紋軸的剛度矩陣,研究了裂紋轉(zhuǎn)子的動力學(xué)特性。Mohiuddin等[31]建立了裂紋轉(zhuǎn)子—軸承系統(tǒng)的有限元模型,并對光軸、錐形軸以及階梯軸三種不同情況進行了實例仿真。陳鐵鋒等[32]運用有限元方法對具有兩條橫向裂紋的轉(zhuǎn)子系統(tǒng)動力學(xué)特性進行仿真分析,研究了不同裂紋夾角的轉(zhuǎn)子動力學(xué)行為。
當(dāng)已存在裂紋的系統(tǒng)出現(xiàn)松動故障時,其動力學(xué)行為將變得十分復(fù)雜。李振平等[33]基于裂紋轉(zhuǎn)子系統(tǒng)的數(shù)學(xué)模型,考慮支承松動故障,建立了松動—裂紋耦合故障轉(zhuǎn)子系統(tǒng)的運動微分方程,應(yīng)用龍格庫塔法仿真分析了該轉(zhuǎn)子系統(tǒng)的耦合故障特性。楊永鋒等[34]在李振平等人研究的基礎(chǔ)上,采用Newmark-β法對小裂紋情況下,松動—橫向剛度—副裂紋方向剛度共同作用下的耦合故障轉(zhuǎn)子系統(tǒng)進行了數(shù)值模擬研究。劉長利等[35]利用了延拓打靶方法求解松動裂紋耦合故障轉(zhuǎn)子軸承系統(tǒng)的非線性動力學(xué)方程,研究了系統(tǒng)響應(yīng)的分岔及穩(wěn)定性。
裂紋故障使得轉(zhuǎn)子系統(tǒng)發(fā)生擬周期運動,松動故障使得轉(zhuǎn)子系統(tǒng)發(fā)生混沌運動,同時存在松動與裂紋故障時,松動故障將占主導(dǎo)地位,隨著裂紋深度增加,其影響作用逐漸增大。
3.4 兩端支座松動故障
對于支承松動故障的研究大多僅限于一端支座發(fā)生松動的情況,實際上,由于機械系統(tǒng)長期處于振動狀態(tài),導(dǎo)致多個支座都可能發(fā)生不同程度的松動,因此,研究轉(zhuǎn)子軸承系統(tǒng)中兩端支座與基礎(chǔ)之間同時出現(xiàn)松動故障時系統(tǒng)的非線性特性是有必要的。張靖等[36]應(yīng)用現(xiàn)代非線性動力學(xué)理論,采用成熟的非穩(wěn)態(tài)非線性油膜力模型,建立了帶有兩端支座松動故障的轉(zhuǎn)子—軸承系統(tǒng)的非線性運動微分方程。馬輝等[37]針對工程中出現(xiàn)的支座松動故障,建立了多盤懸臂轉(zhuǎn)子的松動有限元模型,對單支座和雙支座松動兩類故障情況分別進行了動力學(xué)特性研究。
帶有兩端支座松動故障的轉(zhuǎn)子—軸承系統(tǒng)運動在未到共振區(qū)時以周期運動為主,在過共振區(qū)后,運動形式以擬周期和混沌為主,兩個松動支座的振動在一定程度上相互抑制。
3.5 質(zhì)量慢變系統(tǒng)松動故障
離心機是一種應(yīng)用十分廣泛的高速旋轉(zhuǎn)機械,其顯著特點是轉(zhuǎn)子質(zhì)量在系統(tǒng)運轉(zhuǎn)過程中會發(fā)生慢變,從而導(dǎo)致此類轉(zhuǎn)子系統(tǒng)具有不同于恒定質(zhì)量轉(zhuǎn)子系統(tǒng)的動力學(xué)特性。王宗勇等[38]分析了轉(zhuǎn)子質(zhì)量慢變規(guī)律,建立了帶有支承松動故障的質(zhì)量慢變轉(zhuǎn)子系統(tǒng)的動力學(xué)模型,利用數(shù)值積分法對該轉(zhuǎn)子系統(tǒng)由于支承松動故障而導(dǎo)致的動力學(xué)行為進行了仿真研究。還研究了帶支承松動故障的質(zhì)量慢變—滾動軸承系統(tǒng),除質(zhì)量慢變因素外,還考慮了滾動軸承的支承反力,建立了帶一端支座松動故障的滾動軸承質(zhì)量慢變轉(zhuǎn)子系統(tǒng)的非線性動力學(xué)模型。考慮慢變轉(zhuǎn)子系統(tǒng)存在碰摩故障的情況,建立了帶支承松動—碰摩耦合故障質(zhì)量慢變轉(zhuǎn)子系統(tǒng)的動力學(xué)模型,分析了質(zhì)量慢變時間系數(shù)對轉(zhuǎn)子系統(tǒng)動力學(xué)行為的影響[39]。
通常,質(zhì)量慢變系統(tǒng)的慢變時間系數(shù)對轉(zhuǎn)子系統(tǒng)的混沌運動有較大影響,隨著慢變時間系數(shù)的增大,轉(zhuǎn)子系統(tǒng)響應(yīng)產(chǎn)生混沌運動的頻率范圍擴大,近擬周期運動區(qū)間減小,轉(zhuǎn)子響應(yīng)的波動范圍逐漸增大,可見,慢變時間系數(shù)的增加會促進混沌運動的發(fā)生。
3.6 雙跨轉(zhuǎn)子系統(tǒng)松動故障
關(guān)于松動故障研究的對象大多為單跨轉(zhuǎn)子系統(tǒng),但工程上許多大型轉(zhuǎn)子系統(tǒng)卻是由多跨轉(zhuǎn)子組成。羅躍綱等[40]建立了含有支承松動故障的三軸承支承雙跨彈性轉(zhuǎn)子—軸承系統(tǒng)非線性動力學(xué)模型,分析了松動質(zhì)量對系統(tǒng)非線性特性的影響,采用延拓打靶法和Floquet理論研究了系統(tǒng)周期運動的穩(wěn)定性及失穩(wěn)規(guī)律;再考慮雙跨轉(zhuǎn)子系統(tǒng)基礎(chǔ)松動—碰摩耦合故障的情況,建立三軸承支承的雙跨彈性轉(zhuǎn)子系統(tǒng)松動—碰摩耦合故障的動力學(xué)模型,分析了耦合故障特性與單一故障特性的區(qū)別[14,41]。除此之外,盧艷軍等[42]通過建立松動—碰摩耦合故障的雙盤懸臂立式轉(zhuǎn)子—軸承系統(tǒng)的力學(xué)模型及有限元模型,基于接觸理論研究了松動剛度及碰摩間隙對系統(tǒng)動力學(xué)特性的影響。劉楊等[43]利用有限單元法建立了一個三支撐的松動-碰摩耦合故障雙盤轉(zhuǎn)子軸承系統(tǒng)模型,采用數(shù)值積分法分析了中間軸承松動-碰摩耦合轉(zhuǎn)子軸承系統(tǒng)在不同碰摩剛度、松動剛度參數(shù)域內(nèi)系統(tǒng)的動力學(xué)特性,得到該轉(zhuǎn)子系統(tǒng)松動-碰摩耦合的主要故障特征。
雙跨轉(zhuǎn)子系統(tǒng)與單跨轉(zhuǎn)子系統(tǒng)相比,機械部件繁多,各部件間相互作用,使得系統(tǒng)動力學(xué)模型更加復(fù)雜,故障特性常表現(xiàn)為在不同轉(zhuǎn)速下,系統(tǒng)以不同分岔形式失穩(wěn)。
4 松動故障的實驗研究
上述關(guān)于松動故障特性的研究均采用動力學(xué)建模結(jié)合數(shù)值求解的方法,而早在1996年,徐煜兵等[44]就已通過對轉(zhuǎn)子系統(tǒng)軸承座地腳螺釘緊力不足以及軸承間隙變大兩種典型松動故障的情況進行了實驗,測取軸承的振動信號,歸納出系統(tǒng)存在此兩類故障時的故障癥兆,為滑動軸承松動的故障診斷提供了可信的故障信息。馬輝等[45]在進行動力學(xué)建模研究轉(zhuǎn)子系統(tǒng)松動故障特性的同時,也進行了旋轉(zhuǎn)機械支座松動故障實驗,并利用三維譜陣圖、小波尺度圖和軸心軌跡圖對采集到的振動信號進行分析處理。董廣明等[46]針對某導(dǎo)彈支撐座在環(huán)境激勵下易引發(fā)連接螺栓松動這一具體問題,在支撐座包帶與其槽形支撐的12個連接螺栓緊固和松動的不同情況下,檢測支撐座在垂向?qū)拵щS機激勵下的動態(tài)響應(yīng)。曲秀秀等[47]采用ZT-3型多功能轉(zhuǎn)子模擬實驗臺進行了轉(zhuǎn)子系統(tǒng)不平衡、基座松動與轉(zhuǎn)靜碰摩等實驗,驗證了其建立的不平衡—碰摩—基礎(chǔ)松動耦合故障轉(zhuǎn)子動力學(xué)模型的正確性。Lu等[48]利用轉(zhuǎn)子軸承系統(tǒng)實驗裝置研究帶松動故障時系統(tǒng)的振動特性,通過改變轉(zhuǎn)速、松動間隙、不平衡質(zhì)量及轉(zhuǎn)盤位置等參數(shù)來觀察系統(tǒng)的非線性振動特性。張穎等[49]在600 MW模化汽輪機轉(zhuǎn)子試驗臺上進行了轉(zhuǎn)子正常運轉(zhuǎn)、轉(zhuǎn)子不平衡故障、轉(zhuǎn)子不對中故障、汽流激振故障、軸承松動故障的實驗研究,將獲得的振動參數(shù)三維圖形轉(zhuǎn)化為二維灰度圖形,對二維灰度圖形進行模糊軟形態(tài)學(xué)濾波增強處理和自適應(yīng)邊緣檢測,提取到了轉(zhuǎn)子系統(tǒng)不同狀態(tài)下振動參數(shù)圖形的邊緣特征。
松動故障試驗臺一般由電機、轉(zhuǎn)軸、軸承、軸承座、基座、轉(zhuǎn)子及振動傳感器等核心部件組成,目前已有的試驗方法大都通過擰松軸承座或基座的緊固螺栓來模擬松動現(xiàn)象,采用加速度傳感器采集檢測節(jié)點振動信號,通過快速傅里葉變換(FFT)、希爾伯特-黃變換(HHT)、小波分析、包絡(luò)分析、形態(tài)運算等方法進行故障特征提取,為松動的故障診斷提供依據(jù)。
5 研究展望
基于動力學(xué)模型與實驗方法的松動故障特性研究已取得較大進展,筆者對機械松動故障研究中的有關(guān)關(guān)鍵問題展望如下:
1)更為準(zhǔn)確的松動模型及有效的求解方法。
實際的松動現(xiàn)象是由隱形到顯形,失效漸變過程復(fù)雜,且表現(xiàn)形式多樣,如螺栓預(yù)緊力下降,焊接裂紋萌生,過盈配合量減小等,故應(yīng)采用非線性連續(xù)模型來描述實際松動故障,并以此建立出更為準(zhǔn)確的松動模型。松動模型的求解大多采用數(shù)值積分方法,僅能分析系統(tǒng)的典型故障特征,無法獲得振動響應(yīng)解析解,而解析解卻能更好的解釋松動故障機理。已用于松動問題求解析解的方法有打靶法、漸進法與增量諧波平衡法,但求得的解均為近似解析解,精度不高,因此,開發(fā)能實現(xiàn)復(fù)雜強非線性系統(tǒng)求解析解的有效方法十分必要。
2)典型松動故障特性及其對比。
已有的研究大多針對特定系統(tǒng)分別進行單一松動故障或松動耦合故障特性研究,缺乏各故障特性的對比。進行故障診斷時,松動故障特征雖明顯,卻無法根據(jù)檢測信號準(zhǔn)確判別是單一故障、松動—碰摩耦合或松動—裂紋耦合故障。因此,開展松動、各松動耦合故障的故障特性對比研究至關(guān)重要。
3)新型實驗方法與手段的探索。
松動研究的不同領(lǐng)域、不同對象使得實驗設(shè)備千差萬別,實驗經(jīng)費劇增,已有文獻大都傾向于采用計算機進行松動故障的仿真研究,但仿真一般存在簡化條件,離實際情況還有一定差距,無法完全替代實驗研究。因此,有必要對落后的實驗手段進行改進,開發(fā)經(jīng)濟可靠的新型實驗方法,提高實驗研究水平。
[1]高金吉.旋轉(zhuǎn)機械振動故障原因及識別特征研究[J].振動、測試與診斷,1995,15(3):1-8.
[2]胡建峰.引風(fēng)機地腳螺栓松動后的處理[J].風(fēng)機技術(shù),1995,01:42-43.
[3]王榮鈞.輪斗系統(tǒng)皮帶車A回轉(zhuǎn)減速機地腳松動故障分析[J].露天采礦技術(shù),2012,04:70-71.
[4]趙黎輝,岳萬軍,李振威,等.機械松動故障的診斷[J].中國新技術(shù)新產(chǎn)品,2009,16:125-126.
[5]楊開國.CFH-II型翻車機傳動齒輪軸承座的座腳螺栓聯(lián)接失效分析與改進[J].制冷空調(diào)與電力機械,2003,03:64-67.
[6]樊戰(zhàn)軍,張高峰,江登林.某彈性支撐導(dǎo)彈發(fā)射裝置動力學(xué)特性的研究[J].2013,33(5):173-176+180.
[7]吳(子盡)德.J S系列高壓電動機滾動軸承內(nèi)圈甩出故障分析及處理[J].電機技術(shù),2005,03:57-60.
[8]Mypaвьe B B B,宋忠明.軸承和輪軸摩擦連接處的聲信號傳輸過程的計算[J].國外機車車輛工藝,2008,1:29-33+36.
[9]劉挺,馮霏,趙增暉,等.松動條件下剛度慢變轉(zhuǎn)子的研究[J].中國工程機械學(xué)報,2011,9(2):229-232.
[10]Gunter E J,Barrett L E,Allaire P E.Design of nonlinear squeeze-film damper for aircraft engines[J].Journal of Lubrication Technology,1977,99(1):57-64.
[11]劉獻棟,何田,李其漢.支承松動的轉(zhuǎn)子系統(tǒng)動力學(xué)模型及其故障診斷方法[J].航空動力學(xué)報,2005,20(1):54-59.
[12]陳果.轉(zhuǎn)子—滾動軸承—機匣耦合系統(tǒng)的不平衡松動棍合故障非線性動力學(xué)[J].機械工程學(xué)報,2008,44(3):82-88.
[13]黃志偉,周建中,張孝遠,等.水輪發(fā)電機組軸系松動-碰摩耦合故障的動態(tài)響應(yīng)[J].西南交通大學(xué)學(xué)報,2011,46(1):121-126.
[14]羅躍綱,張松鶴,聞邦椿.雙跨松動—碰摩轉(zhuǎn)子—軸承系統(tǒng)周期運動穩(wěn)定性[J].機械強度,2010,32(6):894-898.
[15]CHU F,TANG Y.Stability and non-linear responses of a rotor-bearing system with pedestal looseness[J].Journal of Sound and Vibration,2001,241(5):879-893.
[16]李宏坤,趙利華,練曉婷.非線性剛度轉(zhuǎn)子—軸承支承松動故障的特征分析[J].動力學(xué)與控制學(xué)報,2011,9 (3):233-237.
[17]MA H,ZHAO X,TENG Y,et al.Analysis of dynamic characteristics for a rotor system with pedestal looseness [J].Shock and Vibration,2011,18(1):13-27.
[18]XIONG G L,XIANG Q,CAO Q S.Bearing looseness fault characteristics analysis of rotor system based on incremental harmonic balance method[J].Applied Mechanics and Materials,2013,397:517-523.
[19]陳虹微.離心壓縮機碰摩振動建模及改進方法[J].噪聲與振動控制,2013,4(2):205-210.
[20]Smalley A J.The dynamic response of rotors to rubs during startup[J].Journal of Vibration and Acoustics, 1989,111(3),226-233.
[21]YANG Y,ZHANG S,HAN Q,et al.Characteristics of variable parameters in rotor system with rub-impact fault [A].Intelligent Control and Automation of World Congress[C].IEEE,2010:5947-5952.
[22]CHEN G,LI C G,WANG D Y.Nonlinear dynamic analysis and experiment verification of rotor-ball bearings-support-stator coupling system for aero engine with rubbing coupling faults[J].Journal of Engineering for Gas Turbines and Power,2009,132(2):022501(1-9).
[23]張華彪,陳予恕.非線性轉(zhuǎn)子的反向全周碰摩響應(yīng)[J].振動與沖擊,2013,32(10):84-90.
[24]Goldman P,Muszynska A.Analytical and experimental simulation of loose pedestal dynamic effects on a rotating machine vibrational response[J].Rotating Machinery and Vehicle Dynamics,1991,35:11-17.
[25]Goldman P,Muszynska A.Chaotic behavior of rotor/stator systems with rubs[J].Journal of Engineering for Gas Turbines and Power,1994,116(3):692-701.
[26]Goldman P,Muszynska A.Dynamic effects in mechanical structures with gaps and impacting:order and chaos [J].Journal of Vibration and Acoustics,1994,116(4): 541-547.
[27]Muszynska A,Goldman P.Chaotic responses of unbalanced rotor/bearing/stator systems with looseness or rubs [J].Chaos,Solitons&Fractals,1995,5(9):1683-1704.
[28]劉元峰,趙玫,朱厚軍.轉(zhuǎn)子有碰摩和支承松動故障時的混沌特性研究[J].振動與沖擊,2002,21(4):36-38.
[29]羅躍綱,曾海泉,李振平,等.基礎(chǔ)松動—碰摩轉(zhuǎn)子系統(tǒng)的混沌特性研究[J].振動工程學(xué)報,2003,16(2):184-187.
[30]YANG B,SUH C S,CHANAK.Characterization and detection of crack-induced rotary instability[J].Journal of Vibration andAcoustics,2001,124(1):40-48.[31]Mohiuddin M A,Khulief Y A.Dynamic response analysis of rotor-bearing systems with cracked shaft[J].Journal of Mechanical Design,2002,124(4):690-696.
[32]陳鐵鋒,荊建平,孟光,等.雙裂紋轉(zhuǎn)子振動特性的有限元和實驗研究[J].噪聲與振動控制,2010,10(5):15-19.
[33]李振平,聞邦椿,張金換,等.松動—裂紋藕合故障轉(zhuǎn)子系統(tǒng)的非線性動力學(xué)行為研究[J].中國機械工程,2003,14(22):1891-1895.
[34]楊永鋒,任興民,秦衛(wèi)陽.松動—裂紋耦合故障轉(zhuǎn)子系統(tǒng)的非線性響應(yīng)[J].機械科學(xué)與技術(shù),2005,24(8):985-987.
[35]劉長利,鄭建榮,周煒,等.松動裂紋轉(zhuǎn)子軸承系統(tǒng)周期運動分岔及穩(wěn)定性分析[J].振動與沖擊,2007,26(11):13-15.
[36]張靖,聞邦椿.兩端支座松動轉(zhuǎn)子系統(tǒng)的頻率特性分析[J].中國機械工程,2008,19(1):68-71.
[37]馬輝,孫偉,任朝暉,等.多盤懸臂轉(zhuǎn)子系統(tǒng)支承松動故障研究[J].航空動力學(xué)報,2009,24(7):1512-1517.
[38]王宗勇,吳敬東,聞邦椿.支承松動的質(zhì)量慢變轉(zhuǎn)子系統(tǒng)混沌特性研究[J].中國機械工程,2005,16(2):165-168.
[39]王宗勇,吳敬東,聞邦椿.質(zhì)量慢變轉(zhuǎn)子系統(tǒng)的松動與碰摩故障研究[J].振動工程學(xué)報,2005,18(2):167-171.
[40]羅躍綱,聞邦椿.雙跨松動轉(zhuǎn)子—軸承系統(tǒng)周期運動穩(wěn)定性[J].振動與沖擊,2007,26(8):9-12.
[41]羅躍綱,杜元虎,任朝暉,等.雙跨轉(zhuǎn)子—軸承系統(tǒng)松動—碰摩耦合故障的非線性特性[J].農(nóng)業(yè)機械學(xué)報,2008,39(11):180-183.
[42]盧艷軍,任朝暉,陳宏,等.雙盤懸臂轉(zhuǎn)子軸承系統(tǒng)松動碰摩耦合故障分析[J].振動、測試與診斷,2007,27(2):102-107.
[43]劉楊,太興宇,馬輝,等.雙盤三支撐轉(zhuǎn)子軸承系統(tǒng)松動-碰摩耦合故障分析[J].航空動力學(xué)報,2013,28(5):977-982.
[44]徐煜兵,黃樹紅,賀國強,等.測取滑動軸承松動故障信息的研究[J].振動與沖擊,1996,15(4):18-20.
[45]馬輝,孫偉,劉杰,等.旋轉(zhuǎn)機械支座松動故障的實驗[J].農(nóng)業(yè)機械學(xué)報,2007,38(6):134-137.
[46]董廣明,陳進,雷宣揚,等.導(dǎo)彈支撐座連接螺栓松動故障診斷的實驗研究[J].振動、測試與診斷,2005,25(3):174-178.
[47]曲秀秀,陳果,喬保棟.不平衡—碰摩—松動耦合故障的轉(zhuǎn)子動力學(xué)建模與盲分離研究[J].振動與沖擊,2011,30(6):74-77+96.
[48]LU W X,CHU F l.Experimental investigation of pedestal looseness in a rotor-bearing system[J].Key Engineering Materials,2009,413:599-605.
[49]張穎,蘇憲章,劉占生,等.旋轉(zhuǎn)機械參數(shù)圖形軟形態(tài)學(xué)自適應(yīng)邊緣檢測[J].哈爾濱工業(yè)大學(xué)學(xué)報,2012,44(3):49-53.
Review of Mechanical Looseness Phenomena and Failure Characteristics Study
CAO Qing-song,XIANG Qin,XIONG Guo-liang
(School of Mechanical and Electrical Engineering,East China Jiaotong University, Nanchang 330013,China)
There exist looseness phenomena in mechanical systems,including foundation looseness,pedestal looseness and component match looseness.The causes of the three types of looseness were explained with examples.Some common types of looseness models were summarized.Research status of six types of looseness,including single looseness,looseness coupled with rub-impact,looseness coupled with crack,looseness at two end-supports,looseness of rotor system with slowly varying mass,and looseness of double-span rotor system was elaborated in the aspects of dynamics modeling,solution method and their nonlinear dynamic characteristics.Research of looseness experiments were also introduced briefly.Finally,the hot points for further study of the looseness faults were prospected.
vibration and wave;mechanical looseness;failure characteristics;rotor system;nonlinear vibration
2;TH113
A
10.3969/j.issn.1006-1335.2015.02.001
1006-1355(2015)02-0001-06+23
2014-09-13
國家自然科學(xué)基金(51265010);華東交通大學(xué)研究生創(chuàng)新專項資金項目(YC2013-X007)
曹青松(1978-),男,安徽無為人,博士,副教授,研究方向:無損檢測、機電一體化以及振動控制。E-mail:2000cqs@163.com
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
科學(xué)大眾(2023年17期)2023-10-26 07:39:14
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
天天愛科學(xué)(2020年6期)2020-09-10 07:22:44
數(shù)學(xué)物理學(xué)報(2020年2期)2020-06-02 11:29:24
汽車維修與保養(yǎng)(2019年7期)2020-01-06 03:30:42
數(shù)學(xué)物理學(xué)報(2017年6期)2018-01-22 02:26:40
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19
汽車維護與修理(2016年10期)2016-07-10 08:17:41
汽車維修與保養(yǎng)(2015年6期)2015-04-17 03:31:50