車用開關磁阻電機模型的研究
2015-12-05 08:27:04謝海良王愛花
電子測試 2015年15期
謝海良,王愛花
(漯河職業技術學院,河南漯河,462000)
車用開關磁阻電機模型的研究
謝海良,王愛花
(漯河職業技術學院,河南漯河,462000)
為研究車用開關磁阻電機(SRM)的控制系統,以四相8/6極結構開關磁阻電機為例,依據其工作原理建立了SRM的動態過程微分方程(包括電路方程、機械方程和機電聯系方程),并以動態微分方程為基礎建立了SRM的用狀態方程表示的非線性數學模型,此非線性模型從理論上比較準確、完整地描述了SRM的電磁力關系和動態性能。此模型的建立可為車用開關磁阻電機系統控制方法的研究奠定理論基礎。
開關磁阻電機;數學模型;非線性
0 引言
開關磁阻電機系統(Switched Reluctance Motor Drives,SRD)是一種新型的無級調速系統。該調速系統繼承了交流變頻調速和直流調速系統的優點,無論是經濟指標還是運行性能都明顯優于交流變頻調速系統和直流調速系統,廣泛應用于家用電器、航空航天、電子、機械及電動車輛等領域。作為SRD核心的開關磁阻電機(Switched Reluctance Motor,SRM),具有結構簡單、起動性能好、沒有電流沖擊、效率高等一系列優點,在現代電力電子技術的發展為其奠定了良好基礎的情況下,SRM已經逐步發展成為了一種極具潛力的電動車驅動電機。
1 開關磁阻電機工作原理
圖1所示為目前較為常用的四相8/6極結構SRM的結構原理圖,A-A′為SRM的凸極定子,其上纏繞有定子繞組,a-a′為凸極轉子。SRM的工作原理為磁阻最小原理,即磁通沿磁阻最小路徑閉合的原理。在圖1中,轉子在轉動過程中,其主軸線與磁場的軸線重合時,磁阻最小。當AA′勵磁時,a-a′向著與A-A′軸線重合的位置轉動,軸線重合時,A相的磁阻達到最小值。此時如果把圖1中定、轉子位置作為起始位置,按照A-B-C-D 的次序給定子繞組通電,轉子則會按照逆時針方向轉動;反之,若按照B-A-D-C 的次序給定子繞組通電,轉子則按順時針方向轉動。因此,SRM的轉動方向與其定子中的電流方向無關,僅取決于定子繞組通電的順序。
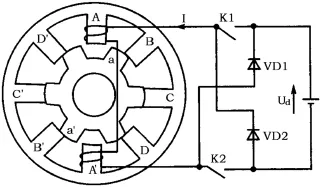
圖1 四相8/6極SRM電機結構原理圖Figure 1 Four phase 8/6 pole SRM Motor structure principle diagram
2 SRM的線性數學模型
從SRM的工作原理可以看出SRM本質為一種電磁式機電裝置,可由電路方程、機械方程和機電聯系方程組合成表達其動態過程的微分方程。
2.1 電動勢平衡方程
假設圖1中SRM的磁路為線性,其各相結構以及電磁參數對稱,忽略其電阻壓降,根據電路基本定律,可寫出SRM第k相的電動勢平衡方程為:電磁轉矩也可以表達為磁共能

式中:Ψk為SRM中第k相繞組磁鏈;Lk為SRM第k相繞組電感;ik為 SRM第k相繞組電流;ω為轉子角速度,ω=dθ/dt;θ為轉子位置角;er為變壓器的電動勢,即磁鏈變化時在繞組中產生的感應電動勢;ea為旋轉電動勢,它是轉子旋轉時使定子繞組的磁鏈之間彼此相互交鏈、變化產生的感應電動勢。
2.2 機械運動方程
當電動機電磁轉矩Te與負載轉矩TL不相等時,轉速發生改變,角加速度dω/dt隨即產生。依據力學原理,得到此時的機械運動方程如下:

式中:Te是電動機電磁轉矩;J 是系統轉動慣量;D是摩擦系數;TL是 負載轉矩。當SRM進入穩態運行時,dω/dt=0,則有:Te=Dω+TL。
2.3 機電聯系方程
式(2)是根據力學原理得到的電磁轉矩的機械表達式,此外,為SRM第 k相繞組的儲能)的函數:將SRM各相轉矩疊加便可得到SRM的合成轉矩為:

把式(1)、(2)、(3)聯立可得到以下方程組:

式(4)便是SRM的機電聯系方程,它從理論上準確、完整地描述了SRM運行時電、磁、力之間的關系。
3 SRM的非線性數學模型
由于SRM運行時內部形成的渦流、磁路飽和及磁滯效應等非線性因素的存在,以及系統運行時受控性和開關性的影響,使得式(4)所描述的精確數學模型難以建立。為便于理論研究,可根據研究目的和SRM的具體運行狀態對(4)式進行必要簡化。在電動車用開關磁阻電機數學模型的建立中,如果考慮定子繞組之間的互感影響,SRM的電壓方程應為:
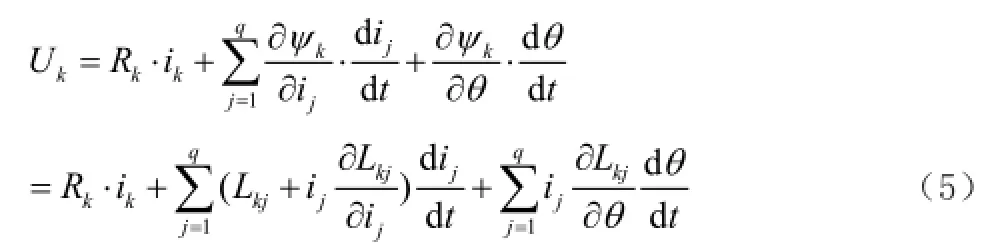
如果忽略定子繞組之間的互感影響,則電壓方程應為:

比較式(5)和式(6)可見,如果忽略定子繞組間的互感,電機的電壓平衡方程可適當的簡化。從式(6)可知,電源電壓Uk等于之和。其中,Ri為第k 相繞組的壓降,kk是因電流變化而引起磁鏈變化所產生的變壓器電動勢,是因轉子位置變化而引起磁鏈變化所產生的運動電動勢,它與電機的機電能量轉換直接相關。
根據電動機機電能量轉換之基本原理可以得到其任意相的瞬時電磁轉矩為:


綜合式(7)和式(8),對四相(8/6極)SRM做出如下假設:1)主電路直流電源的電壓為恒定值;2)忽略鐵損,即鐵芯的磁滯損耗、渦流效應;3)SRM各相參數嚴格對稱,每相繞組的兩個線圈皆正向串聯,且忽略各相之間的互感。則SRM的非線性數學模型為:
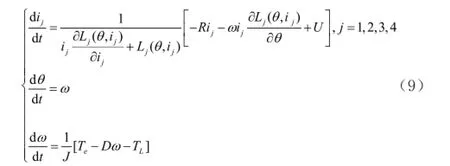
式中,Te=Te1+Te2+Te3+Te4,其中Te1、Te2、Te3、Te4為各相繞組電磁轉矩;Lj為各相非線性電感,并有:
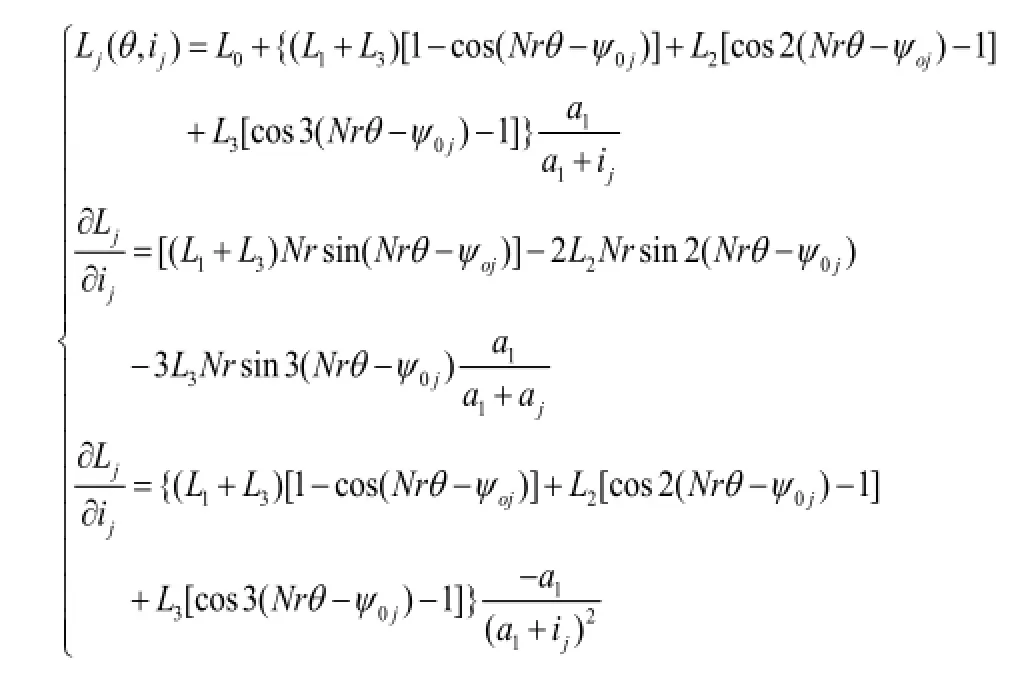
SRM中各項非線性電磁轉矩為:
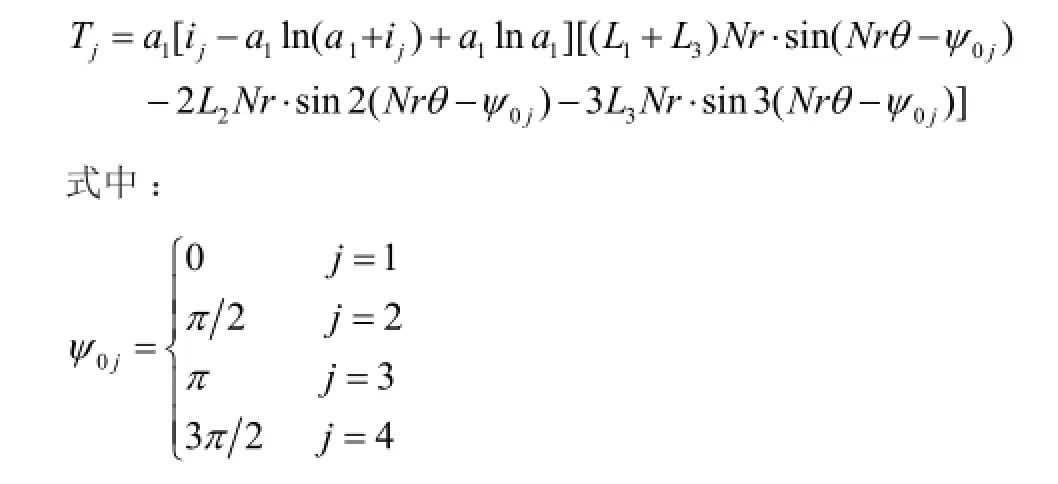
式(9)所示用狀態方程表示的非線性模型反應了SRM中電、磁、力各動態參數之間的關系,可在實際應用中研究SRM的動態性能。
4 結束語
對電動車用SRM控制方法的研究須依據能夠反映電動機電、磁、力三者關系的數學模型。文中根據SRM的工作原理建立了其線性數學模型,并以線性模型中的電路方程、機械方程和機電聯系方程為基礎建立了用狀態方程表示的SRM的非線性數學模型,此模型可以從理論上比較準確、完整地描述SRM的電磁力關系及其動態性能,為后續SRM控制方法的研究奠定了理論基礎。
[1] 謝海良.電動自行車用開關磁阻電機系統的建模與仿真研究[D]. [碩士學位論文].鄭州:鄭州大學,2012
[2] 史秀梅.電動汽車用開關磁阻電機的設計與仿真[D]. [碩士學位論文].廣州:中山大學,2010
[3] 黃海宏,王海欣.迭代學習控制減小開關磁阻電機轉矩脈動[J].電氣應用,2006,25(7):100-103
[4] 王素杰張奕黃,等.電動車用開關磁阻電機全工況運行方案研究[J].電氣應用,2007,26(5):73-76
[5] 韓亮張奕黃.基于DSP的開關磁阻電機調速系統在電動汽車中的應用[J].電氣應用,2005,24(3):31-34
[6] 孫慎言,閆智.采用開關磁阻電動機驅動電動汽車的可行性分析[J].長春工業大學學報,2002,1 0(23):67~69
[7] 詹瓊華.開關磁阻電機[M].武漢:華中理工大學出版社,1992
[8] 周濤.電動自行車用開關磁阻電機驅動系統的研究與實踐[D]. [碩士學位論文].武漢:華中科技大學,2006
[9] 吳建華.開關磁阻電機設計與應用[M],北京:機械工業出版社,2000,110~112
[10] 王宏華.開關型磁阻電動機調速控制技術[M].北京:機械工業出版社,1995,3
[11] 歐陽啟.電動車用開關磁阻電機控制系統研究及實現[D]. [碩士學位論文].湖南:湖南大學,2006
謝海良,1978年出生,講師,碩士,主要研究方向為電氣自動化技術、機電一體化技術和計算機仿真;
王愛花,女,1979年出生,講師,碩士研究生,主要研究方向為流體傳動與控制、機電液一體化技術。
Study on the Model of Switched Reluctance Motor for Vehicle
Xie Hailiang,Wang Aihua
(Luohe Vocational Technology College,Henan Luohe,462000)
In order to research the control system of switched reluctance motor(SRM)for vehicle,take the 4-phases 8/6 poles SRM for instance,building up the dynamic differential equation(including circuit equation,mechanical equation,Mechanical & Electronic related equation)of SRM based on its operational principle.In addition,setting up the nonlinear mathematical model of SRM which is espressed by state equation.In theory,the nonlinear model describes the dynamic properties and the relationship among electricity,magnetism and mechanics of SRM accurately and intactly.The building of nonlinear model lays the theoretical groundwork for the research on control method of switched reluctance motor drivers.
SRM;mathematical model;nonlinear
TM352