一種基于超高頻RFID電子標簽的精確定位系統
2015-12-05 15:31:03喬靜郭燕玲陳同寧劉偉民
教育教學論壇 2015年46期
喬靜 郭燕玲 陳同寧 劉偉民
摘要:本文介紹了一種圓內接正六邊形的精確定位系統。系統將閱讀器到參考電子標簽的定位誤差計算在內,可同時定位多個電子標簽,也可以對運動標簽定位,成本低。通過數據分析可得,該系統在不同的環境下定位精度高,可靠性高。
關鍵詞:超高頻RFID;圓內接正六邊形定位系統;誤差;高精度;高可靠性
中圖分類號:G642.0 ? ? 文獻標志碼:A ? ? 文章編號:1674-9324(2015)46-0056-02
射頻識別技術(Radio Frequency Identication)是從20世紀80年代起逐步發展走向成熟的一項自動識別技術。它通過射頻信號自動識別目標對象并獲取相關數據,識別工作無須人工干預,可工作于各種惡劣環境。RFID技術可識別高速運動物體并可同時識別多個標簽,操作快捷方便[1]。在未來幾年中,超高頻RFID技術將會得到非常廣泛的應用[2-3]。
采用RFID作為定位識別技術的典型代表是SpotON。該系統基于信號強度分析,發展了一種聚合算法對三維空間進行定位,SpotON系統中硬件標簽以網絡狀的形式分布,無須中央控制單元,通過標簽檢測到的信號強弱來表征標簽之間的幾何距離,但是完整的SpotON系統目前為止仍不完善[4]。采用紅外線定位技術只適合于短距離傳播,且容易被熒光燈或房間內的燈光干擾,所以該定位技術在定位范圍和定位精度上有很大的局限性[5]。Cricket Location-Support System和Active Bat均采用超聲波時延信號進行定位,其整體定位精度較高,但需要大量的底層硬件設施,成本太高。除此以外,其他定位技術,如UWB[6]、Bluetooth[7]等,都有其各自的優缺點。為提高RFID技術定位的精度,本系統充分利用RFID技術非接觸和非視距等優點,設計了圓內接正六邊形定位系統。
一、RFID定位系統介紹
1.三邊測量法。無線信號的接受強度和信號傳輸具體的關系可以用式(1)來表示,其中RSSI是接受信號強度,d是收發節點之間的距離,n是信號傳播因子。
RSSI=-(A+10nlgd)?搖 (1)
RSSI值受周圍環境的影響較大,具有時變特性,有時會偏離式(1)的描述,根據接收信號強度估計出來的距離d就會有較大誤差。通過大量數據分析,采用了一個噪聲模型,即環境衰減因素模型,可有效補償環境因素帶來的誤差,如式(2)所示。
RSSI=-(A+10nlgd)-EAF (2)
上式中EAF(dBm)為環境影響因素,它的值取決于室內環境,是靠大量的數據累積的經驗值。EAF是一個隨機變量,但為了增強實用性,將其固定為一個值。通過大量比較實驗環境下測得的RSSI值與理想狀態下的RSSI值,得到實驗環境EAF大概為11dBm,A取值45,n取值3.5[8]。
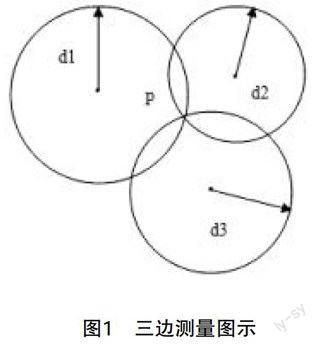
在采集到RSSI值后,依據式(2)就可以得到閱讀器到標簽的距離,通過三邊測量法[9]就可以定位到待定位標簽的位置。如圖1所示。
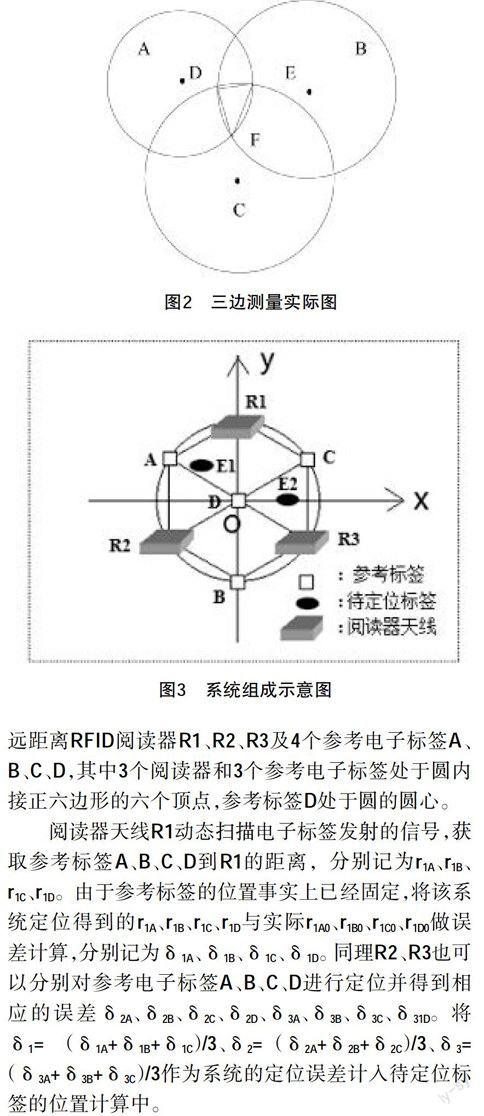
在實際情況下因RSSI受多徑衰減和非視距阻擋的影響,所估測的d1、d2、d3值比實際的d大得多。三個圓兩兩相交于點D、E、F,連接D、E、F為三角形,以三角形的質心作為對未知節點的估測距離。如圖2所示。
2.圓內接正六邊形定位系統。為了將RSSI受多徑衰減、非視距及系統本身的影響考慮在內,基于超高頻RFID的高精度定位系統組成如圖3所示,使用三個遠距離RFID閱讀器R1、R2、R3及4個參考電子標簽A、B、C、D,其中3個閱讀器和3個參考電子標簽處于圓內接正六邊形的六個頂點,參考標簽D處于圓的圓心。
閱讀器天線R1動態掃描電子標簽發射的信號,獲取參考標簽A、B、C、D到R1的距離,分別記為r1A、r1B、r1C、r1D。由于參考標簽的位置事實上已經固定,將該系統定位得到的r1A、r1B、r1C、r1D與實際r1A0、r1B0、r1C0、r1D0做誤差計算,分別記為δ1A、δ1B、δ1C、δ1D。同理R2、R3也可以分別對參考電子標簽A、B、C、D進行定位并得到相應的誤差δ2A、δ2B、δ2C、δ2D、δ3A、δ3B、δ3C、δ31D。將δ1=(δ1A+δ1B+δ1C)/3、δ2=(δ2A+δ2B+δ2C)/3、δ3=(δ3A+δ3B+δ3C)/3作為系統的定位誤差計入待定位標簽的位置計算中。
二、仿真實驗及結果分析
超高頻RFID定位系統的優劣主要從其定位精度、成本等幾個方面進行評估。本文特針對系統的定位精度進行仿真分析。
應用MATLAB仿真軟件對基于三邊定位算法的定位系統進行仿真,仿真過程如下:
1.給定圓接正六邊形系統的半徑。則閱讀器R1、R2、R3的坐標可知。
2.在圓的內部產生F點,假設(x,y)。計算D點到閱讀器R1、R2、R3的距離,假設分別為d1、d2、d3。
3.d1、d2、d3分別加上該系統的定位誤差δ1、δ2、δ3后假設為D1、D2、D3。
4.在系統誤差不同的情況下,根據R1、R2、R3三點的坐標和D1、D2、D3用三邊測量法計算待定位標簽的坐標。
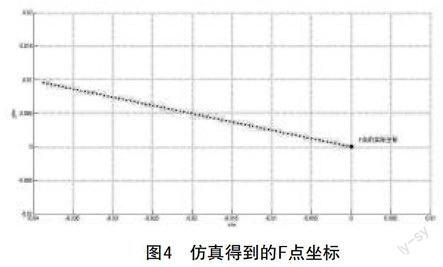
給定圓的半徑為4m,F點實際坐標為(0,0),經仿真得到F點的坐標如圖4所示。從定位結果中可以發現該系統在不同定位誤差下具有高的定位精度和可靠性,定位誤差不超過0.04m。
結束語:
本文提出的圓內接正六邊形的定位系統只使用了用3個閱讀器和4個參考標簽實現定位,將系統受多徑衰減、非視距及系統本身的影響用閱讀器到參考電子標簽的定位誤差表征,并將該誤差用于待定位標簽的定位中,通過三邊測量法進行定位。仿真結果表明:該系統具有較高的穩定性和精度,在降低RFID定位成本的基礎上提高了定位的性能。
參考文獻:
[1]哈卡米,徐邦振,吳哲夫.一種改進的室內物品RFID定位技術[J].應用天地,2014,(6):65-66.
[2]Costanzo A,Masotti D,Ussmueller T,et al.Tag,Youre It:Ranging and Finding via RFID Technology[J]. IEEE Microwave Magazine,2013,14(5):36-46.
[3]宋遠峰,劉新.基于RFID的定位綜述[J].數字通信,2013,40(4):9-11.
[4]王勇,胡旭東.一種基于RFID的室內定位算法[J].浙江理工大學學報,2009,26(2):228-230.
[5]陳瑞鑫,鄒傳云.有源RFID定位系統設計與實現[J].電子技術應用,2010,36(10):114-116.
[6]Guvenc I,Sahinoglu Z. Multiscale energy products for TOA estimation in IR-UWB systems[C]. In:Proc. of the IEEE Global Telecommunications Conf.(GLOBECOM 2005).St. Louis,2005:209-213.
[7]Montemrlo M,Thrum S,Koller D. A factored solution to the simultaneous localization and mapping problem:Proceedings of the AAAI National Conference on Artifical Intelligence,2002[C].Edmonton,Canada:AAAI,2002:593-598.
[8]石為人,熊志廣,許磊.一種用于室內人員定位的RSSI定位算法[J].計算機工程與應用,2010,(17):232-235.
[9]林瑋,等.基于RSSI的無線傳感器網絡三角形質心算法研究[J].傳感器技術,2009,(2):180-182.
