1553B接口伺服系統(tǒng)頻率特性測(cè)試儀設(shè)計(jì)
2015-12-05 05:11:22孫宏云李文清
航天控制 2015年4期
關(guān)鍵詞:進(jìn)程
孫宏云 李文清
1.北京航天自動(dòng)控制研究所,北京100854
2.中國(guó)運(yùn)載火箭技術(shù)研究院研究發(fā)展中心,北京100076
頻率特性是伺服系統(tǒng)的一項(xiàng)重要特性,在開(kāi)展飛行器控制系統(tǒng)半實(shí)物仿真試驗(yàn)前必須對(duì)伺服系統(tǒng)進(jìn)行頻率特性測(cè)試以檢驗(yàn)其是否滿足相關(guān)技術(shù)指標(biāo),掌握其對(duì)整個(gè)仿真試驗(yàn)系統(tǒng)的影響。早期的伺服系統(tǒng)一般采用模擬信號(hào)作為控制輸入,對(duì)于這種伺服能夠使用1250 頻率響應(yīng)分析儀直接完成頻率特性測(cè)試。但隨著1553B 數(shù)字總線在飛行器控制系統(tǒng)中的應(yīng)用,伺服系統(tǒng)將總線接口集成到控制器中,直接從數(shù)字總線獲取控制輸入,1250 頻率響應(yīng)分析儀已不能完成對(duì)此類伺服的頻率特性測(cè)試。本文介紹一種1553B 接口伺服系統(tǒng)頻率特性測(cè)試儀的設(shè)計(jì)方案,并搭建測(cè)試驗(yàn)證環(huán)境對(duì)其測(cè)試準(zhǔn)確性進(jìn)行了驗(yàn)證。方案采用虛擬儀器的思想[1],利用某飛行器仿真計(jì)算機(jī)豐富的硬件接口及其在計(jì)算處理和存儲(chǔ)顯示方面的優(yōu)勢(shì),設(shè)計(jì)專用軟件實(shí)現(xiàn)了頻率特性測(cè)試功能。
1 硬件組成
頻率特性測(cè)試儀的硬件完全借助該飛行器的仿真計(jì)算機(jī)。仿真機(jī)具有豐富的硬件接口和實(shí)時(shí)計(jì)算處理能力,能以軟硬件結(jié)合的方式構(gòu)建物理仿真模型,為被測(cè)對(duì)象提供實(shí)際工作時(shí)的輸入輸出條件。該飛行器的仿真計(jì)算機(jī)采用PXI 構(gòu)架,配置凌華6880 處理器刀片、Condor QCP-1553B 板卡、研華MIC-3716 A/D 采集卡及其它接口模件。6880 處理器刀片主要完成飛行器模型實(shí)時(shí)計(jì)算;QCP-1553B是一款1553B 總線仿真卡,能同時(shí)模擬總線BC,BM和31個(gè)RT,在半實(shí)物仿真中用于等效慣組、綜控器和伺服控制器等單機(jī)的RT 接口;MIC-3716 用于采集飛行器舵擺角測(cè)量傳感器的輸出。本文設(shè)計(jì)的伺服系統(tǒng)頻率特性測(cè)試儀利用上述仿真計(jì)算機(jī)硬件配置,將QCP-1553B 初始化為BC 功能模擬飛控計(jì)算機(jī)向伺服系統(tǒng)發(fā)送控制指令,通過(guò)MIC-3716 同步采集伺服舵擺角輸出,對(duì)輸入和輸出數(shù)據(jù)進(jìn)行相關(guān)算法處理,得到伺服系統(tǒng)頻率特性。
2 測(cè)試算法
將測(cè)試信號(hào)輸入到被測(cè)系統(tǒng),同步采集系統(tǒng)的輸入與輸出,使用相關(guān)算法處理采集數(shù)據(jù)即可得到系統(tǒng)頻率特性[2]。測(cè)試信號(hào)可使用正弦掃描、白噪聲、Chirp 信號(hào)或Multitone 信號(hào)。由于正弦掃描穩(wěn)定可靠、精度較高,只是在測(cè)試速度上相對(duì)較慢[3],并且使用正弦掃描能很方便地測(cè)出系統(tǒng)在關(guān)注頻率點(diǎn)上的特性,所以選擇其作為本方案的測(cè)試輸入。
設(shè)被測(cè)對(duì)象輸入信號(hào)為x(t)= asinωt,輸出信號(hào)y(t)= bsin(ωt + φ),將y(t)展開(kāi)得:

其中,c1= bcosφ,c2= bsinφ。
為求c1,將y(t)乘以sinωt 并在N個(gè)周期內(nèi)積分:
同樣,將y(t)乘以cosωt 并在N個(gè)周期內(nèi)積分可求得c2:
利用輸入輸出采樣數(shù)據(jù),通過(guò)數(shù)值積分計(jì)算出等式(2)和(3)中的積分項(xiàng),可得被測(cè)對(duì)象在角頻率ω 處的系統(tǒng)增益和相移分別為:
3 功能實(shí)現(xiàn)
第2 節(jié)測(cè)試算法中的數(shù)值積分使用辛普森數(shù)值積分法,該算法需要積分上下限時(shí)間范圍內(nèi)等步長(zhǎng)時(shí)間點(diǎn)上系統(tǒng)的輸入與輸出采樣。本方案通過(guò)QCP-1553B 板卡實(shí)現(xiàn)采樣間隔的精確控制。
QCP-1553B 的BC 模擬功能將消息排列成稱為“Minor Frame”的多個(gè)幀(MiF#1 ~MiF#n),1個(gè)幀中的每條消息以可選的首尾間隔時(shí)間(gap time)順序發(fā)送,而各個(gè)幀將以指定的首首間隔時(shí)間(Minor Frame time)依次運(yùn)行。當(dāng)BC 運(yùn)行在“one shot”模式,最后一幀MiF#n 運(yùn)行結(jié)束后BC 即自動(dòng)停止,而當(dāng)BC 運(yùn)行在“l(fā)oop”模式,與MiF#n 開(kāi)始運(yùn)行時(shí)刻間隔Minor Frame time 時(shí)長(zhǎng)后將再次運(yùn)行MiF#1,直到人為停止BC。使用者需保證安排在每一幀中的所有消息發(fā)送時(shí)間之和小于Minor Frame time 時(shí)長(zhǎng)。以上通訊中的時(shí)間間隔都通過(guò)板卡上自帶的1us 分辨率硬件時(shí)鐘進(jìn)行控制,具有ns 級(jí)的高精確度,所以也可作為采樣時(shí)刻的時(shí)鐘參考,通過(guò)查詢BC 消息幀運(yùn)行狀態(tài)實(shí)現(xiàn)采樣周期控制。
根據(jù)QCP-1553B 板卡BC 模擬功能的運(yùn)行機(jī)制,測(cè)試儀只定義1個(gè)消息幀并運(yùn)行在“l(fā)oop”模式下。與1553B 總線接口伺服的指令刷新周期相同,Minor Frame time 設(shè)置為1ms。幀所包含的消息參照飛控計(jì)算機(jī)與伺服系統(tǒng)間的通訊協(xié)議進(jìn)行定義,幀自動(dòng)循環(huán)運(yùn)行時(shí)各消息的命令字保持不變,只按測(cè)試指令在每個(gè)幀周期更新其數(shù)據(jù)字。測(cè)試程序通過(guò)不斷查詢板卡1553_control_reg 寄存器獲取BC 運(yùn)行狀態(tài),該寄存器的bcb(bc busy)位有效時(shí)表示消息幀正在運(yùn)行中,無(wú)效時(shí)表示BC 正處于再次運(yùn)行消息幀的等待狀態(tài)。當(dāng)bcb 位從無(wú)效變?yōu)橛行r(shí)進(jìn)行AD 采集,當(dāng)bcb 位從有效變?yōu)闊o(wú)效時(shí)更新消息數(shù)據(jù)字。因1553B 總線接口集成在伺服控制器中,伺服任務(wù)書(shū)中規(guī)定1553B 指令傳輸造成的響應(yīng)延遲包含在整個(gè)伺服的動(dòng)態(tài)特性指標(biāo)要求中。同時(shí),1kHz 的輸入輸出采樣頻率遠(yuǎn)大于飛行器伺服機(jī)構(gòu)規(guī)定動(dòng)態(tài)性能指標(biāo)的頻率范圍(1 ~400rad/s),上述定時(shí)周期設(shè)置與查詢處理方法符合伺服頻率特性測(cè)試需求。
為實(shí)現(xiàn)測(cè)試指令輸入與輸出采樣的時(shí)間同步,必須保證測(cè)試程序能及時(shí)查詢到bcb 位狀態(tài)從無(wú)效變?yōu)橛行Р⒘⒓赐瓿葾D 采集,這需要測(cè)試儀的操作具有快速性和嚴(yán)格的實(shí)時(shí)性,而仿真機(jī)的Windows XP + RTX 實(shí)時(shí)環(huán)境恰好能滿足這一要求。RTX 采用HAL 擴(kuò)展技術(shù)為Windows XP 操作系統(tǒng)安裝實(shí)時(shí)子系統(tǒng)RTSS,并對(duì)HAL 修改,在Windows 和RTX 線程間增加中斷隔離,當(dāng)運(yùn)行RTSS 線程時(shí),屏蔽Windows 控制中斷保證RTSS線程的實(shí)時(shí)性。并且,RTSS 子系統(tǒng)采用獨(dú)立的實(shí)時(shí)線程調(diào)度,其優(yōu)先級(jí)高于所有Widows 線程調(diào)度,進(jìn)一步保證了任務(wù)完成的實(shí)時(shí)性。RTX 還支持對(duì)I/O、內(nèi)存等硬件的直接操作,不受Windows系統(tǒng)影響,從而確保程序與硬件接口間數(shù)據(jù)的實(shí)時(shí)交互。但同時(shí),RTX 又能與Windows 系統(tǒng)無(wú)縫地結(jié)合在一起,可以利用Windows 系統(tǒng)所有的優(yōu)勢(shì),簡(jiǎn)化測(cè)試程序設(shè)計(jì)[4]。
基于仿真機(jī)的Windows+RTX 實(shí)時(shí)環(huán)境,測(cè)試軟件功能通過(guò)RTSS 進(jìn)程和Win32 進(jìn)程配合實(shí)現(xiàn)。測(cè)試中對(duì)硬件接口的訪問(wèn)放置于RTSS 進(jìn)程中,保證能在實(shí)時(shí)查詢到BC 消息幀啟動(dòng)后立即操作MIC-3716 采樣伺服輸出。Win32 進(jìn)程完成配置文件讀取、測(cè)試啟停控制、采樣數(shù)據(jù)計(jì)算處理和測(cè)試結(jié)果顯示存儲(chǔ)等非實(shí)時(shí)任務(wù)。2個(gè)進(jìn)程之間通過(guò)共享內(nèi)存和事件體通訊。RTSS 進(jìn)程的運(yùn)行流程如圖1 所示。
Win32 進(jìn)程讀取包含測(cè)試頻率點(diǎn)、激勵(lì)幅值、測(cè)試周期等信息的配置文件,依據(jù)配置信息對(duì)每個(gè)頻率點(diǎn)按1ms 間隔采樣asinωt 函數(shù)值,生成輸出序列后傳遞給RTSS 進(jìn)程。RTSS 進(jìn)程通過(guò)查詢bcb 狀態(tài)位控制AD 采集和BC 消息幀更新時(shí)刻,在完成序列輸出和伺服角位移采集后將采樣數(shù)據(jù)傳遞給Win32進(jìn)程進(jìn)行該頻率點(diǎn)的幅頻特性計(jì)算。軟件運(yùn)行效果見(jiàn)圖2。
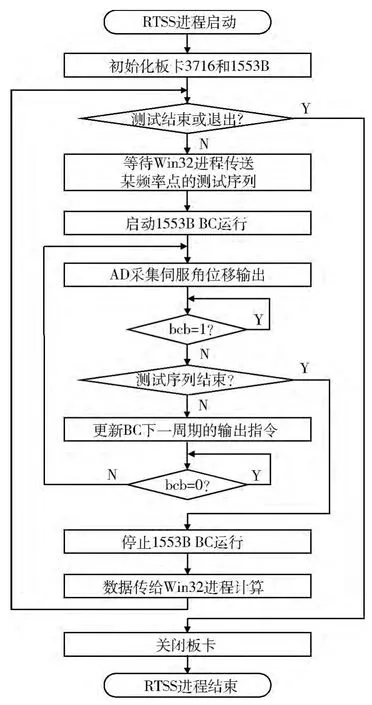
圖1 RTSS 進(jìn)程運(yùn)行流程圖
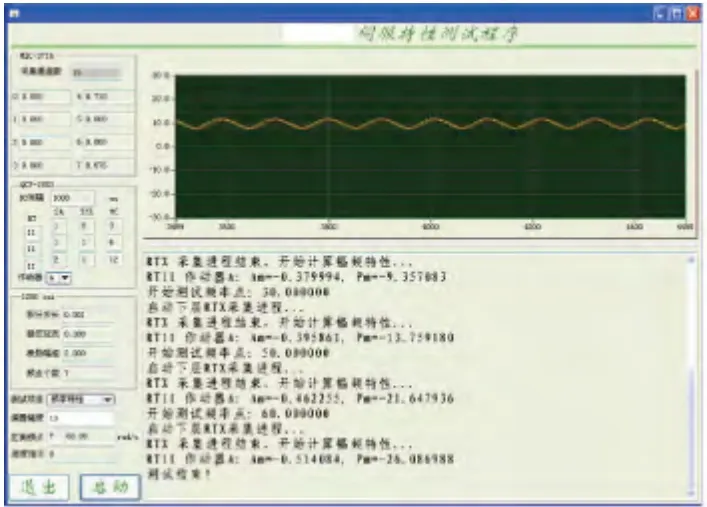
圖2 測(cè)試軟件運(yùn)行效果
4 測(cè)試驗(yàn)證
為對(duì)頻率特性測(cè)試設(shè)備的測(cè)試準(zhǔn)確性進(jìn)行驗(yàn)證,基于數(shù)字計(jì)算機(jī)構(gòu)建被測(cè)對(duì)象。該計(jì)算機(jī)同樣運(yùn)行Windows + RTX 實(shí)時(shí)環(huán)境,配置1 塊QCP-1553B 多功能板卡模擬伺服RT 接口接收測(cè)試指令,另外配置1 塊凌華CPCI-6208 DA 板卡將被測(cè)模型的輸出轉(zhuǎn)換為對(duì)應(yīng)電壓量。被測(cè)模型是頻率特性已知的傳遞函數(shù),采用四階龍格庫(kù)塔數(shù)值計(jì)算方法,每收到1553B 總線指令后進(jìn)行1ms 步長(zhǎng)的遞推計(jì)算。在上述測(cè)試環(huán)境下,對(duì)1/(0.02S+1)一階慣性環(huán)節(jié)進(jìn)行測(cè)試,選取某飛行器伺服系統(tǒng)任務(wù)書(shū)中規(guī)定的測(cè)試頻率點(diǎn),由于測(cè)試儀1ms 進(jìn)行1 次伺服指令更新,所測(cè)理論值應(yīng)是該環(huán)節(jié)的零階保持離散化后的頻率特性,實(shí)測(cè)值與理論值比較見(jiàn)表1。
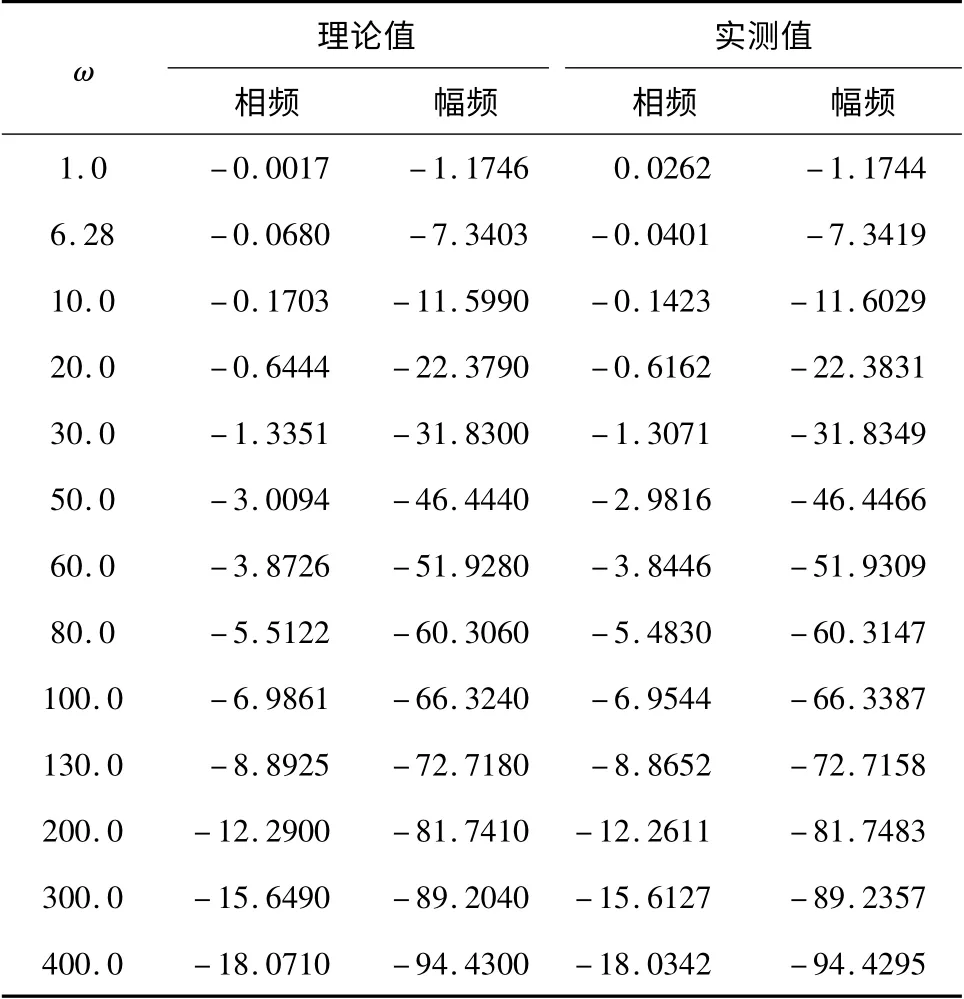
表1 理論與實(shí)測(cè)結(jié)果
從測(cè)試結(jié)果可以看出,測(cè)試儀具有較高的測(cè)試精度,在所搭建的測(cè)試環(huán)境下,各測(cè)試頻率點(diǎn)上實(shí)測(cè)值與理論值的幅頻偏差在0.04dB 以內(nèi),相頻偏差在0.04°以內(nèi)。
5 結(jié)論
1553B 接口伺服系統(tǒng)頻率特性測(cè)試儀設(shè)計(jì)方案采用虛擬儀器的思想,通過(guò)在半實(shí)物仿真試驗(yàn)系統(tǒng)已有硬件基礎(chǔ)上設(shè)計(jì)了專用測(cè)試軟件實(shí)現(xiàn),降低了測(cè)試成本。本方案已應(yīng)用于多個(gè)項(xiàng)目,成功檢驗(yàn)了伺服系統(tǒng)實(shí)際特性,解決了使用傳統(tǒng)1250 頻率響應(yīng)分析儀不能直接進(jìn)行特性測(cè)試的問(wèn)題。
[1]趙四軍,王少萍,尚耀星. 基于虛擬儀器的液壓伺服系統(tǒng)頻率特性測(cè)試[J]. 液壓與氣動(dòng),2009,(3):44-46. (ZHAO Si jun,WANG Shao ping,SHANG Yao xing. Frequency characteristic test of hydraulic servo system based on birtual instrum ent[J]. Chinese Hydraulics & Pneumatics,2009,(3):44-46.)
[2]胡壽松. 自動(dòng)控制原理第四版[M]. 科學(xué)出版社,2001,5:172.
[3]沈偉,蘭山.伺服系統(tǒng)頻率特性測(cè)試方法研究[J]. 實(shí)驗(yàn)技術(shù)與管理,2011,28(11):268-271. (Shen Wei,Lan Shan. Research on testing method of frequency characteristic for servo system[J]. Experimental Technology and Management,2011,28(11):268-271.)
[4]黃鍵,宋曉,薛順虎.RTX 平臺(tái)下實(shí)時(shí)仿真系統(tǒng)的設(shè)計(jì)方法[J]. 計(jì)算機(jī)應(yīng)用與軟件,2009,26(4):167-169. (Huang Jian,Song Xiao,Xue Shunhu. Design method of real-time simulation system based on RTX platform[J].Computer Application and software,2009,26(4):167-169.)
猜你喜歡
中國(guó)外匯(2019年20期)2019-11-25 09:54:58
中國(guó)外匯(2019年8期)2019-07-13 06:01:06
電腦愛(ài)好者(2018年15期)2018-08-23 17:24:06
民主與科學(xué)(2014年3期)2014-02-28 11:23:03
教育與職業(yè)(2014年7期)2014-01-21 02:35:04
計(jì)算機(jī)與網(wǎng)絡(luò)(2013年1期)2013-06-05 05:31:50
電腦迷(2012年24期)2012-04-29 00:44:03
中華女子學(xué)院學(xué)報(bào)(2012年6期)2012-03-25 13:52:27
俄羅斯問(wèn)題研究(2012年1期)2012-03-25 09:54:45
杭州師范大學(xué)學(xué)報(bào)(社會(huì)科學(xué)版)(2011年3期)2011-04-04 08:58:20
